文档内容
山东省菏泽市2025-2026学年高二上学期期中考试
物理试题(A)
一、单选题
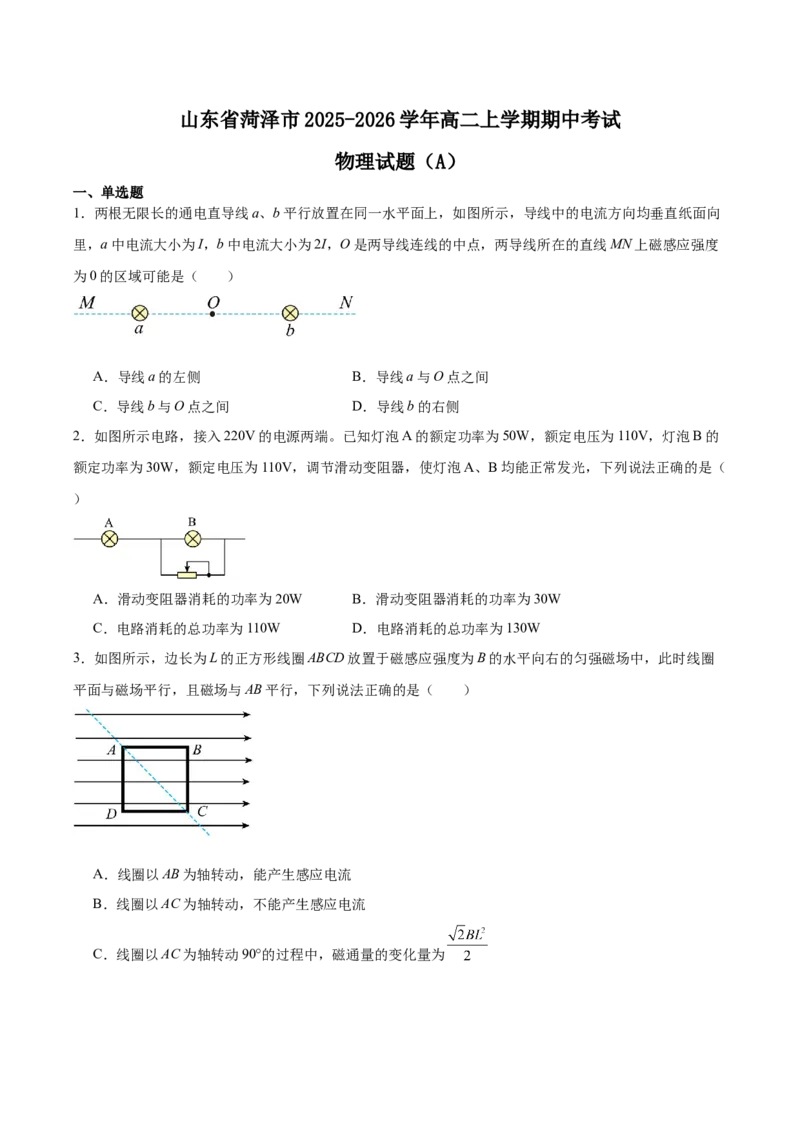
1.两根无限长的通电直导线a、b平行放置在同一水平面上,如图所示,导线中的电流方向均垂直纸面向
里,a中电流大小为I,b中电流大小为2I,O是两导线连线的中点,两导线所在的直线MN上磁感应强度
为0的区域可能是( )
A.导线a的左侧 B.导线a与O点之间
C.导线b与O点之间 D.导线b的右侧
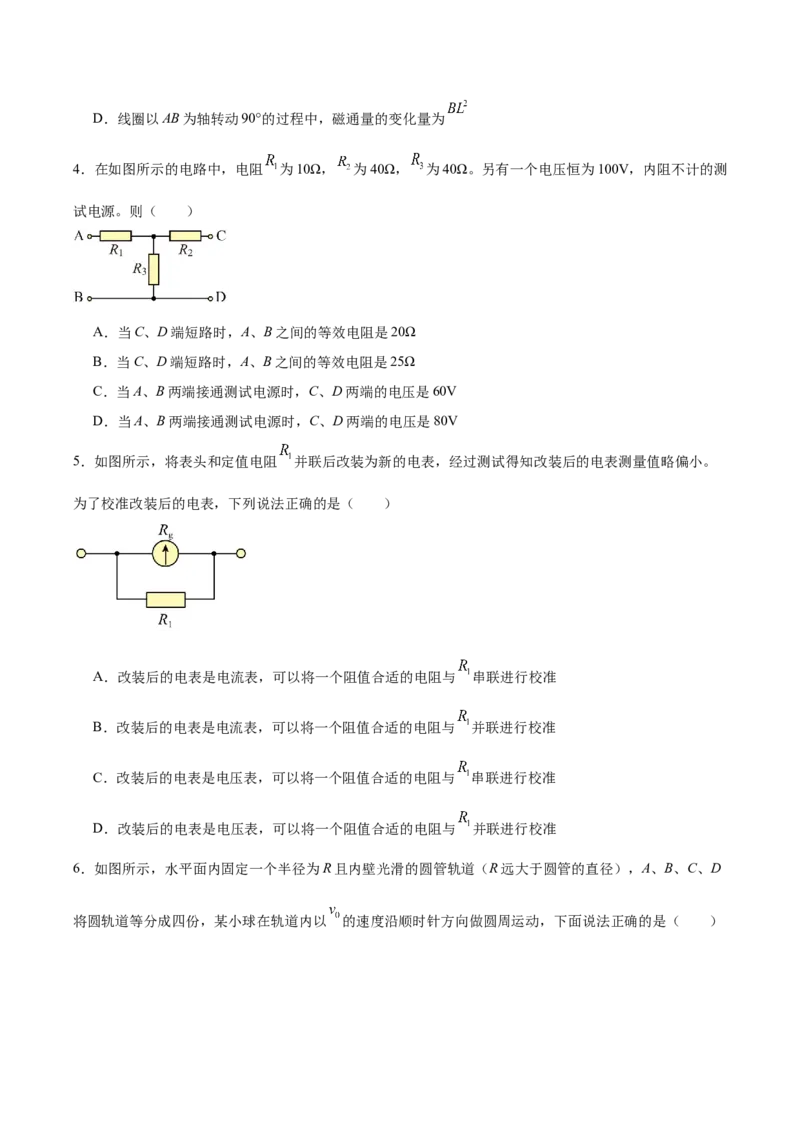
2.如图所示电路,接入220V的电源两端。已知灯泡A的额定功率为50W,额定电压为110V,灯泡B的
额定功率为30W,额定电压为110V,调节滑动变阻器,使灯泡A、B均能正常发光,下列说法正确的是(
)
A.滑动变阻器消耗的功率为20W B.滑动变阻器消耗的功率为30W
C.电路消耗的总功率为110W D.电路消耗的总功率为130W
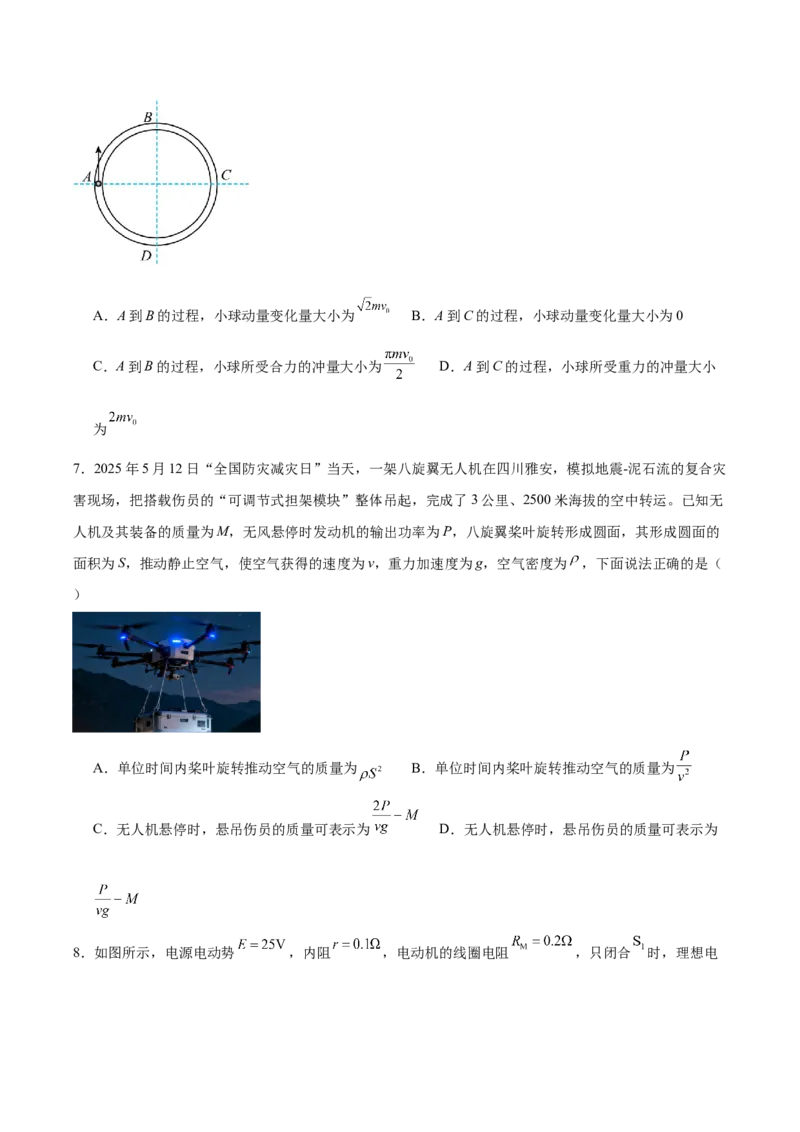
3.如图所示,边长为L的正方形线圈ABCD放置于磁感应强度为B的水平向右的匀强磁场中,此时线圈
平面与磁场平行,且磁场与AB平行,下列说法正确的是( )
A.线圈以AB为轴转动,能产生感应电流
B.线圈以AC为轴转动,不能产生感应电流
C.线圈以AC为轴转动90°的过程中,磁通量的变化量为D.线圈以AB为轴转动90°的过程中,磁通量的变化量为
4.在如图所示的电路中,电阻 为10Ω, 为40Ω, 为40Ω。另有一个电压恒为100V,内阻不计的测
试电源。则( )
A.当C、D端短路时,A、B之间的等效电阻是20Ω
B.当C、D端短路时,A、B之间的等效电阻是25Ω
C.当A、B两端接通测试电源时,C、D两端的电压是60V
D.当A、B两端接通测试电源时,C、D两端的电压是80V
5.如图所示,将表头和定值电阻 并联后改装为新的电表,经过测试得知改装后的电表测量值略偏小。
为了校准改装后的电表,下列说法正确的是( )
A.改装后的电表是电流表,可以将一个阻值合适的电阻与 串联进行校准
B.改装后的电表是电流表,可以将一个阻值合适的电阻与 并联进行校准
C.改装后的电表是电压表,可以将一个阻值合适的电阻与 串联进行校准
D.改装后的电表是电压表,可以将一个阻值合适的电阻与 并联进行校准
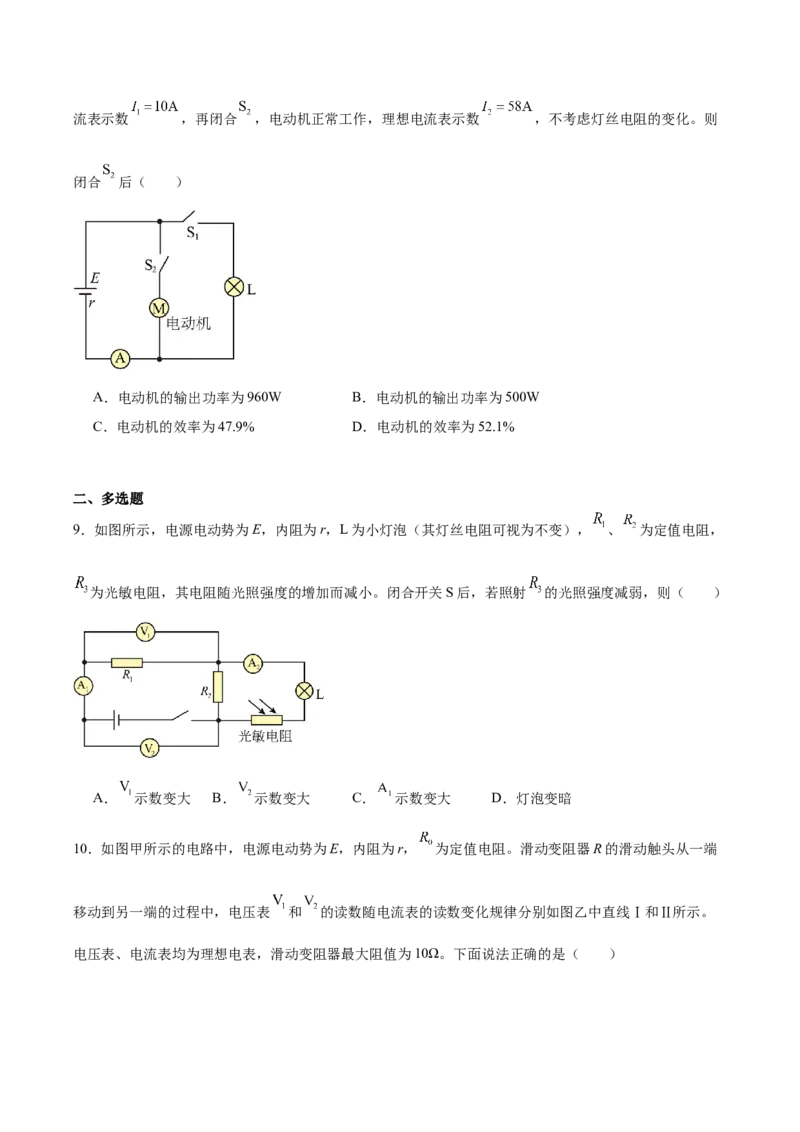
6.如图所示,水平面内固定一个半径为R且内壁光滑的圆管轨道(R远大于圆管的直径),A、B、C、D
将圆轨道等分成四份,某小球在轨道内以 的速度沿顺时针方向做圆周运动,下面说法正确的是( )A.A到B的过程,小球动量变化量大小为 B.A到C的过程,小球动量变化量大小为0
C.A到B的过程,小球所受合力的冲量大小为 D.A到C的过程,小球所受重力的冲量大小
为
7.2025年5月12日“全国防灾减灾日”当天,一架八旋翼无人机在四川雅安,模拟地震-泥石流的复合灾
害现场,把搭载伤员的“可调节式担架模块”整体吊起,完成了3公里、2500米海拔的空中转运。已知无
人机及其装备的质量为M,无风悬停时发动机的输出功率为P,八旋翼桨叶旋转形成圆面,其形成圆面的
面积为S,推动静止空气,使空气获得的速度为v,重力加速度为g,空气密度为 ,下面说法正确的是(
)
A.单位时间内桨叶旋转推动空气的质量为 B.单位时间内桨叶旋转推动空气的质量为
C.无人机悬停时,悬吊伤员的质量可表示为 D.无人机悬停时,悬吊伤员的质量可表示为
8.如图所示,电源电动势 ,内阻 ,电动机的线圈电阻 ,只闭合 时,理想电流表示数 ,再闭合 ,电动机正常工作,理想电流表示数 ,不考虑灯丝电阻的变化。则
闭合 后( )
A.电动机的输出功率为960W B.电动机的输出功率为500W
C.电动机的效率为47.9% D.电动机的效率为52.1%
二、多选题
9.如图所示,电源电动势为E,内阻为r,L为小灯泡(其灯丝电阻可视为不变), 、 为定值电阻,
为光敏电阻,其电阻随光照强度的增加而减小。闭合开关S后,若照射 的光照强度减弱,则( )
A. 示数变大 B. 示数变大 C. 示数变大 D.灯泡变暗
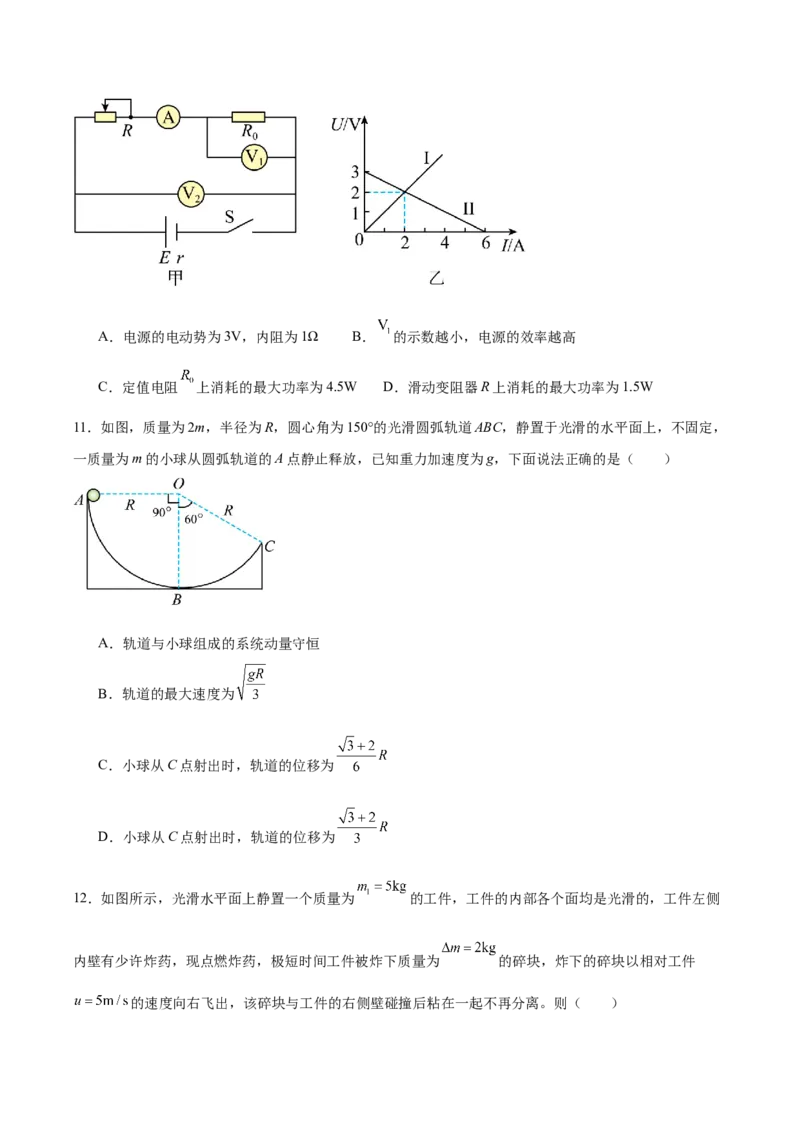
10.如图甲所示的电路中,电源电动势为E,内阻为r, 为定值电阻。滑动变阻器R的滑动触头从一端
移动到另一端的过程中,电压表 和 的读数随电流表的读数变化规律分别如图乙中直线Ⅰ和Ⅱ所示。
电压表、电流表均为理想电表,滑动变阻器最大阻值为10Ω。下面说法正确的是( )A.电源的电动势为3V,内阻为1Ω B. 的示数越小,电源的效率越高
C.定值电阻 上消耗的最大功率为4.5W D.滑动变阻器R上消耗的最大功率为1.5W
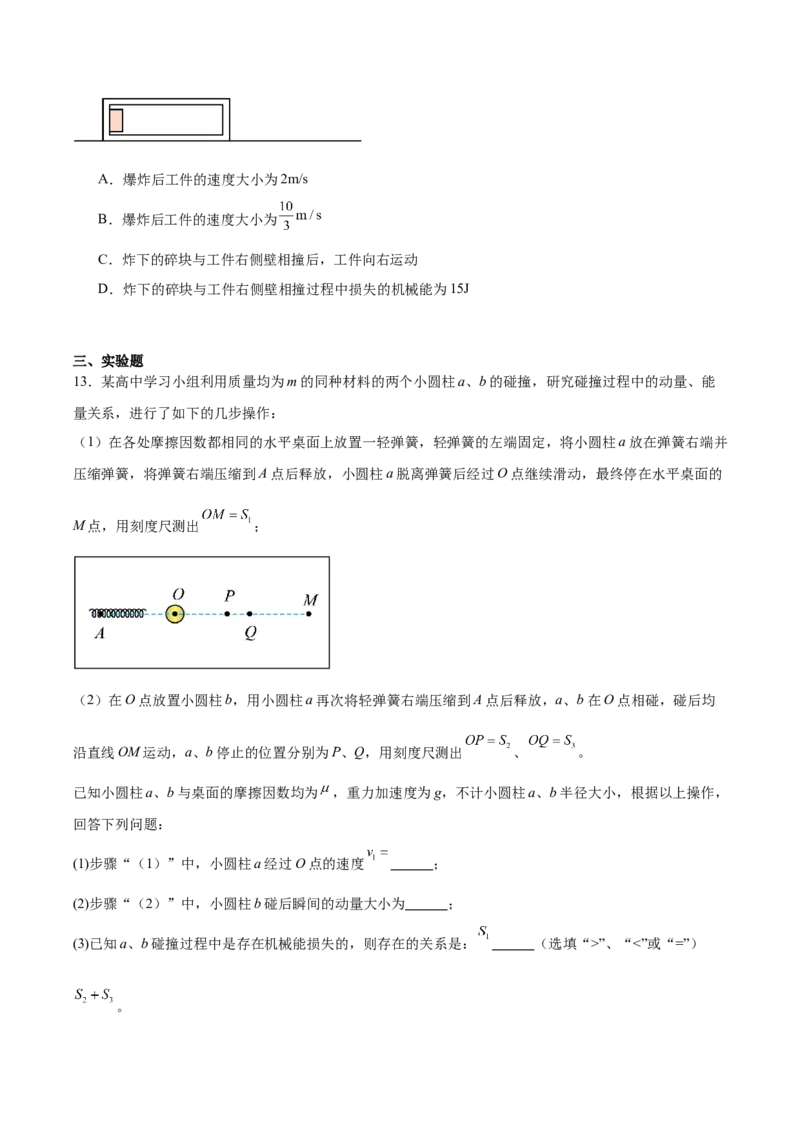
11.如图,质量为2m,半径为R,圆心角为150°的光滑圆弧轨道ABC,静置于光滑的水平面上,不固定,
一质量为m的小球从圆弧轨道的A点静止释放,已知重力加速度为g,下面说法正确的是( )
A.轨道与小球组成的系统动量守恒
B.轨道的最大速度为
C.小球从C点射出时,轨道的位移为
D.小球从C点射出时,轨道的位移为
12.如图所示,光滑水平面上静置一个质量为 的工件,工件的内部各个面均是光滑的,工件左侧
内壁有少许炸药,现点燃炸药,极短时间工件被炸下质量为 的碎块,炸下的碎块以相对工件
的速度向右飞出,该碎块与工件的右侧壁碰撞后粘在一起不再分离。则( )A.爆炸后工件的速度大小为2m/s
B.爆炸后工件的速度大小为
C.炸下的碎块与工件右侧壁相撞后,工件向右运动
D.炸下的碎块与工件右侧壁相撞过程中损失的机械能为15J
三、实验题
13.某高中学习小组利用质量均为m的同种材料的两个小圆柱a、b的碰撞,研究碰撞过程中的动量、能
量关系,进行了如下的几步操作:
(1)在各处摩擦因数都相同的水平桌面上放置一轻弹簧,轻弹簧的左端固定,将小圆柱a放在弹簧右端并
压缩弹簧,将弹簧右端压缩到A点后释放,小圆柱a脱离弹簧后经过O点继续滑动,最终停在水平桌面的
M点,用刻度尺测出 ;
(2)在O点放置小圆柱b,用小圆柱a再次将轻弹簧右端压缩到A点后释放,a、b在O点相碰,碰后均
沿直线OM运动,a、b停止的位置分别为P、Q,用刻度尺测出 、 。
已知小圆柱a、b与桌面的摩擦因数均为 ,重力加速度为g,不计小圆柱a、b半径大小,根据以上操作,
回答下列问题:
(1)步骤“(1)”中,小圆柱a经过O点的速度 ;
(2)步骤“(2)”中,小圆柱b碰后瞬间的动量大小为 ;
(3)已知a、b碰撞过程中是存在机械能损失的,则存在的关系是: (选填“>”、“<”或“=”)
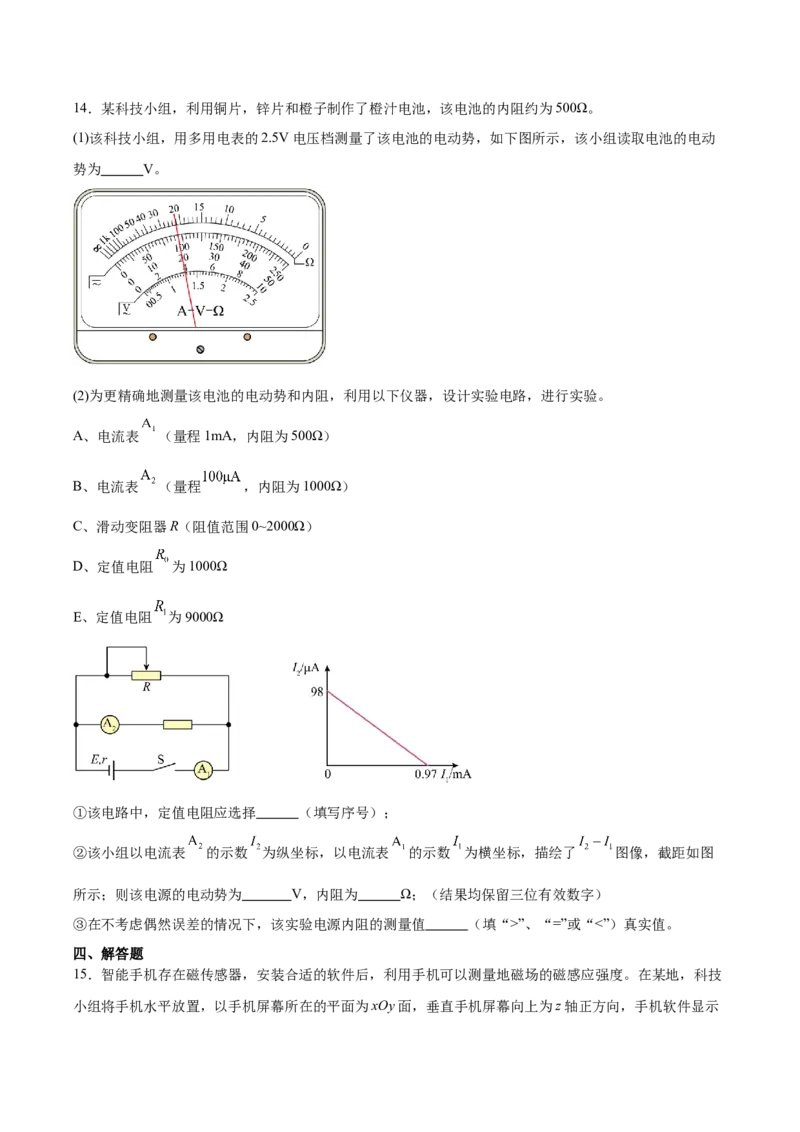
。14.某科技小组,利用铜片,锌片和橙子制作了橙汁电池,该电池的内阻约为500Ω。
(1)该科技小组,用多用电表的2.5V电压档测量了该电池的电动势,如下图所示,该小组读取电池的电动
势为 V。
(2)为更精确地测量该电池的电动势和内阻,利用以下仪器,设计实验电路,进行实验。
A、电流表 (量程1mA,内阻为500Ω)
B、电流表 (量程 ,内阻为1000Ω)
C、滑动变阻器R(阻值范围0~2000Ω)
D、定值电阻 为1000Ω
E、定值电阻 为9000Ω
①该电路中,定值电阻应选择 (填写序号);
②该小组以电流表 的示数 为纵坐标,以电流表 的示数 为横坐标,描绘了 图像,截距如图
所示;则该电源的电动势为 V,内阻为 Ω;(结果均保留三位有效数字)
③在不考虑偶然误差的情况下,该实验电源内阻的测量值 (填“>”、“=”或“<”)真实值。
四、解答题
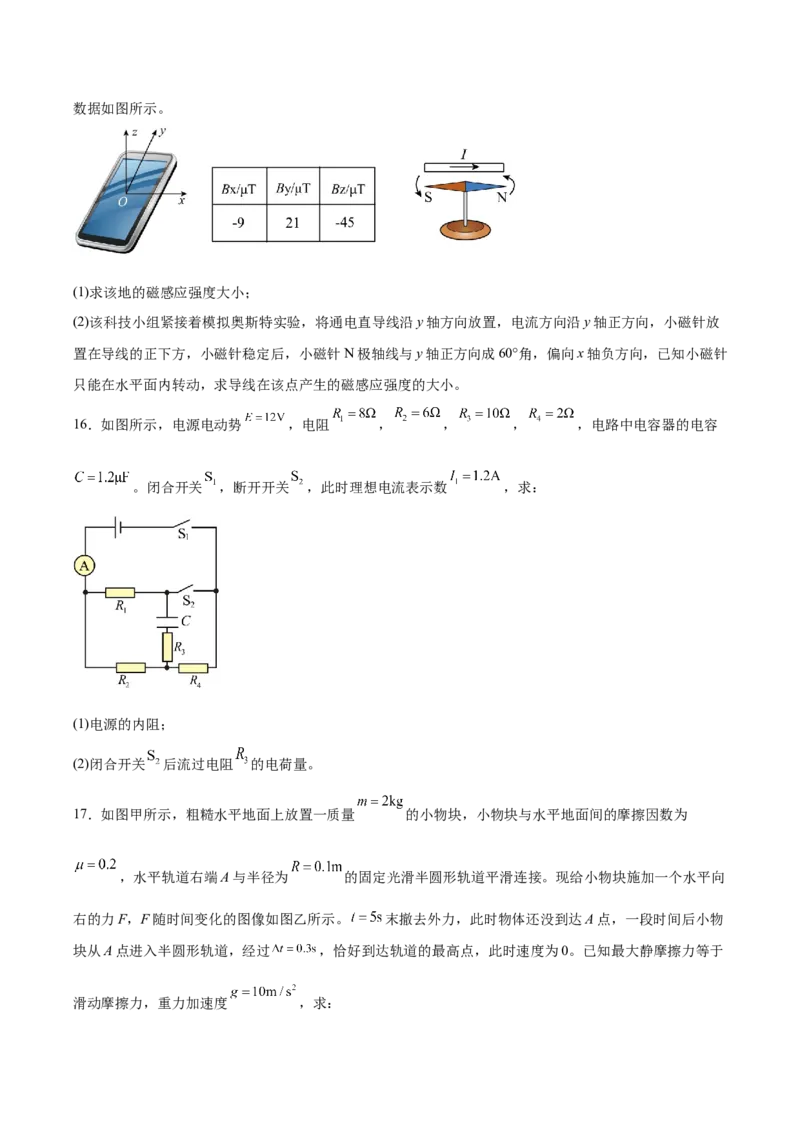
15.智能手机存在磁传感器,安装合适的软件后,利用手机可以测量地磁场的磁感应强度。在某地,科技
小组将手机水平放置,以手机屏幕所在的平面为xOy面,垂直手机屏幕向上为z轴正方向,手机软件显示数据如图所示。
(1)求该地的磁感应强度大小;
(2)该科技小组紧接着模拟奥斯特实验,将通电直导线沿y轴方向放置,电流方向沿y轴正方向,小磁针放
置在导线的正下方,小磁针稳定后,小磁针N极轴线与y轴正方向成60°角,偏向x轴负方向,已知小磁针
只能在水平面内转动,求导线在该点产生的磁感应强度的大小。
16.如图所示,电源电动势 ,电阻 , , , ,电路中电容器的电容
。闭合开关 ,断开开关 ,此时理想电流表示数 ,求:
(1)电源的内阻;
(2)闭合开关 后流过电阻 的电荷量。
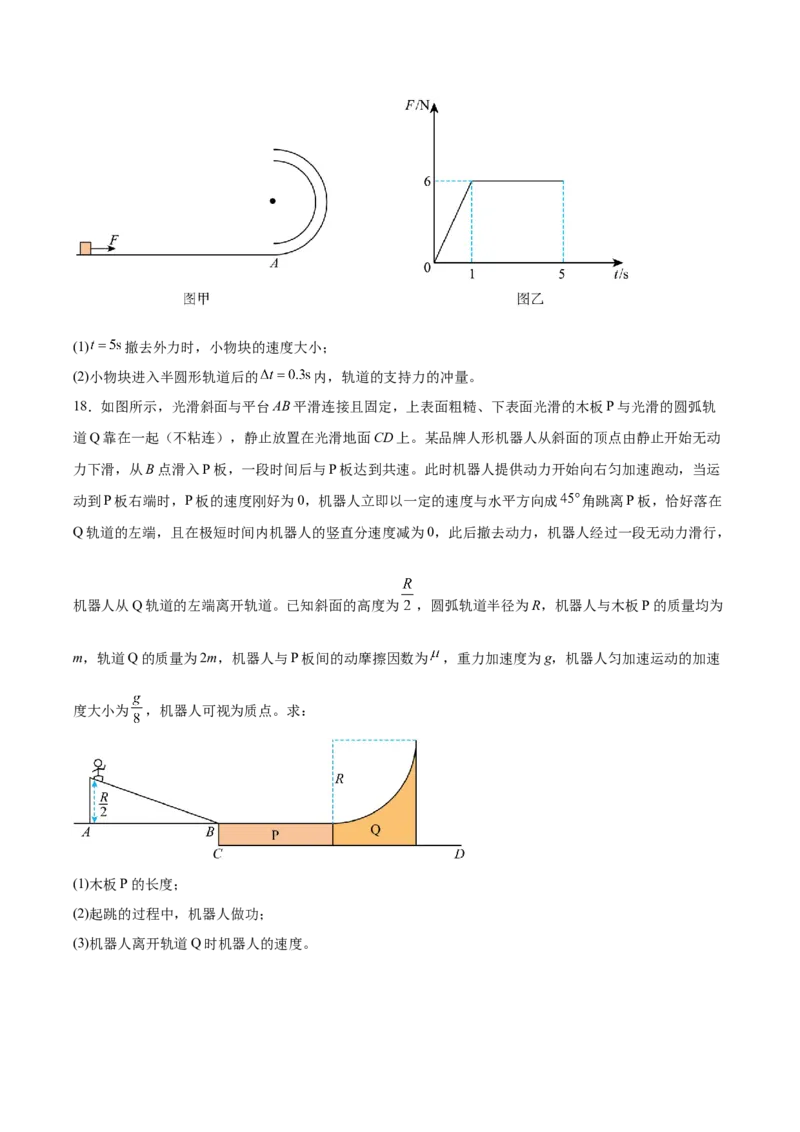
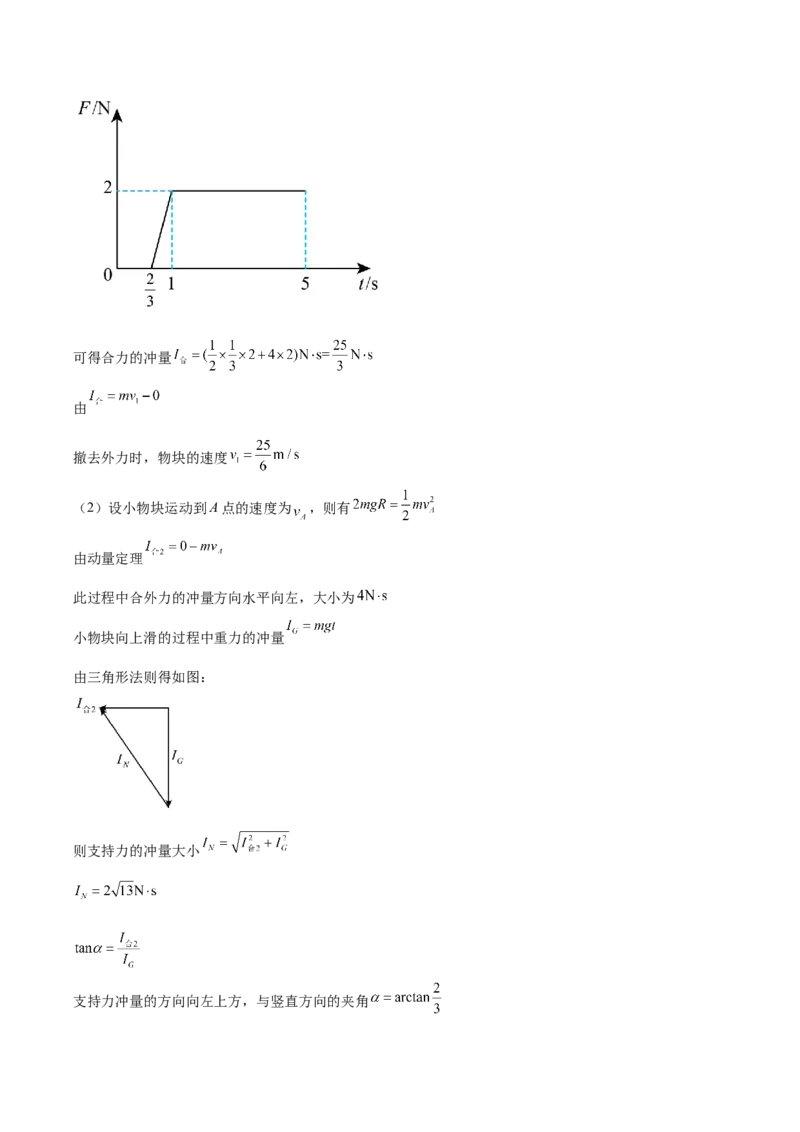
17.如图甲所示,粗糙水平地面上放置一质量 的小物块,小物块与水平地面间的摩擦因数为
,水平轨道右端A与半径为 的固定光滑半圆形轨道平滑连接。现给小物块施加一个水平向
右的力F,F随时间变化的图像如图乙所示。 末撤去外力,此时物体还没到达A点,一段时间后小物
块从A点进入半圆形轨道,经过 ,恰好到达轨道的最高点,此时速度为0。已知最大静摩擦力等于
滑动摩擦力,重力加速度 ,求:(1) 撤去外力时,小物块的速度大小;
(2)小物块进入半圆形轨道后的 内,轨道的支持力的冲量。
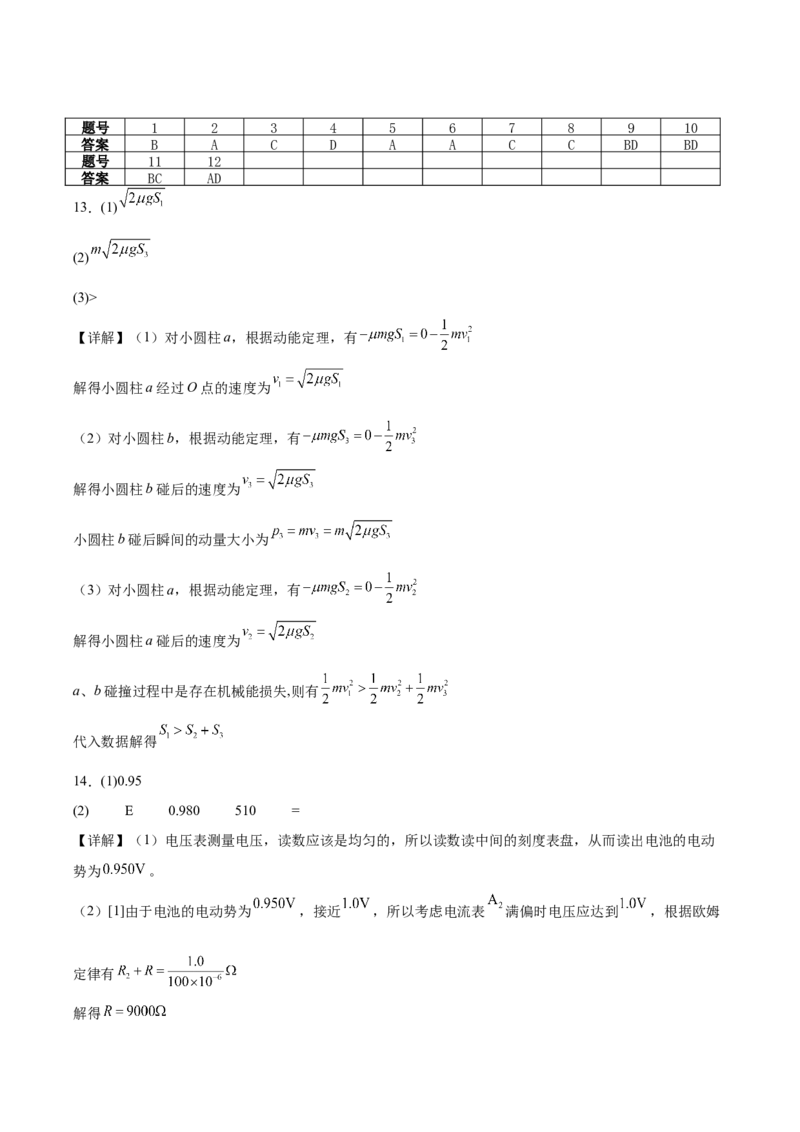
18.如图所示,光滑斜面与平台AB平滑连接且固定,上表面粗糙、下表面光滑的木板P与光滑的圆弧轨
道Q靠在一起(不粘连),静止放置在光滑地面CD上。某品牌人形机器人从斜面的顶点由静止开始无动
力下滑,从B点滑入P板,一段时间后与P板达到共速。此时机器人提供动力开始向右匀加速跑动,当运
动到P板右端时,P板的速度刚好为0,机器人立即以一定的速度与水平方向成 角跳离P板,恰好落在
Q轨道的左端,且在极短时间内机器人的竖直分速度减为0,此后撤去动力,机器人经过一段无动力滑行,
机器人从Q轨道的左端离开轨道。已知斜面的高度为 ,圆弧轨道半径为R,机器人与木板P的质量均为
m,轨道Q的质量为2m,机器人与P板间的动摩擦因数为 ,重力加速度为g,机器人匀加速运动的加速
度大小为 ,机器人可视为质点。求:
(1)木板P的长度;
(2)起跳的过程中,机器人做功;
(3)机器人离开轨道Q时机器人的速度。题号 1 2 3 4 5 6 7 8 9 10
答案 B A C D A A C C BD BD
题号 11 12
答案 BC AD
13.(1)
(2)
(3)>
【详解】(1)对小圆柱a,根据动能定理,有
解得小圆柱a经过O点的速度为
(2)对小圆柱b,根据动能定理,有
解得小圆柱b碰后的速度为
小圆柱b碰后瞬间的动量大小为
(3)对小圆柱a,根据动能定理,有
解得小圆柱a碰后的速度为
a、b碰撞过程中是存在机械能损失,则有
代入数据解得
14.(1)0.95
(2) E 0.980 510 =
【详解】(1)电压表测量电压,读数应该是均匀的,所以读数读中间的刻度表盘,从而读出电池的电动
势为 。
(2)[1]由于电池的电动势为 ,接近 ,所以考虑电流表 满偏时电压应达到 ,根据欧姆
定律有
解得所以定值电阻应该选择E;
[2] 图像中 ,根据改装后的电压表量程为 ,所以电流为 时,对应的电压为
,所以电源的电动势为 ;
[3]根据闭合电路欧姆定律,在外电压为0时,有
代入数据解得 ;
[4]该实验中对于电源内阻测量,根据 ,并考虑了电流表内阻问题,显然电源内阻的测量值等于真实
值。
15.(1)
(2)
【详解】(1)该地的磁感应强度的x轴分量大小为 ,y轴分量大小为 ,z轴分量大小为 ,根
据磁感应强度叠加符合平行四边形定则可知该地的磁感应强度大小
解得
(2)如图所示,通电直导线产生的磁场沿x轴负方向,则x轴方向的合磁场为
小磁针N极轴线与y轴正方向成60°角,偏向x轴负方向,可知
解得
16.(1)(2)
【详解】(1)当开关 闭合, 断开时有
代入题中数据,解得
(2)闭合开关 前,电容器电压等于电阻 两端电压,且电容器上极板电势高,上极板带正电,电容器
两板间电压
电容器带的电荷量
闭合开关 后,电容器电压等于电阻 两端电压,且电容器上极板电势低,上极板带负电,电容器两板
间电压
流过 的电流为
电容器所带的电荷量
则流过 的电荷量
联立解得
17.(1)
(2) ,与竖直方向的夹角
【详解】(1)由于物块与水平地面间的最大静摩擦力
所以 之前,物块保持静止;
后,物块所受的合外力随时间变化的图像如图所示可得合力的冲量
由
撤去外力时,物块的速度
(2)设小物块运动到A点的速度为 ,则有
由动量定理
此过程中合外力的冲量方向水平向左,大小为
小物块向上滑的过程中重力的冲量
由三角形法则得如图:
则支持力的冲量大小
支持力冲量的方向向左上方,与竖直方向的夹角18.(1)
(2)
(3)
【详解】(1)机器人在斜面上的运动,根据动能定理有
解得
机器人与P板、Q轨道系统动量守恒
解得
由能量守恒有
解得
机器人加速跑动,P、Q分离,机器人与P板动量守恒
解得
机器人匀加速运动,由运动学公式有
解得
由运动学公式机器人的位移
解得
由运动学公式P板的位移解得
则木板P长度
(2)Q轨道的位移
此时P板右端与Q轨道左端的距离
机器人起跳过程中水平方向动量守恒,机器人跳离P板的速度为 ,此时P板的速度为 ,机器人与P板
水平方向动量守恒
机器人斜抛,跳到Q轨道,水平方向有
竖直方向有
联立解得 ,
由动能定理起跳过程做功
解得
(3)再次滑离Q轨道时,机器人的速度为 ,轨道Q的速度为 ,根据动量守恒定律有
根据机械能守恒定律有

