
文档内容
2022 年 5 月 21 日全国事业单位联考《综合
应用能力》C 类及参考答案
材料一
人的大脑由大量的神经元通过突触连接在一起,构成了极其复杂的运算网络。目前,通过
模拟人脑神经元信息处理机制的深度神经网络技术已经成为智能时代最为重要的建模方法。
尽管已有的机器人经常被称为“智能机器人”,然而这些“智能机器人”能够实现的动作及行
为能力基本是通过预定义的规则实现的,而人类进行动作、行为的学习主要是通过模仿及
与环境的交互实现的,此外,“智能机器人”目前还不具有类脑的多模态感知及基于感知信
息的类脑自主决策能力。在运动机制方面,它们也不具备类人的外周神经系统,其灵活性
和自适应性与人类运动系统还具有较大差距。
随着人工智能、机器人和传感器技术的不断发展,机器人已经由传统在线示教工作模式向
智能工作模式方向发展,结合脑科学研究成果,机器人理论和应用研究有望迎来新的突破,
甚至可成功制造出类脑智能机器人。类脑智能机器人系统是融合了视觉、听觉、思考和执
行等能力的综合智能系统,它能够以类似于人脑的工作方式运行。同时,类脑智能机器人
力图将人的内部机理融入机器人系统,从而提高机器人的认知、学习和动作控制能力,通
过融入对人的机理的探索,类脑智能机器人有望实现与人“共情”,从而产生更深度的交互
与合作。
类脑智能机器人首先涉及的是机器人的仿生结构和感知控制,而仿肌肉驱动器是其中的重
要部分。这些仿肌肉驱动器可以省却齿轮,轴承,避免复杂的结构,同时减轻重量,具有
更好的应用效果。如Shahinpoor等人用4片重0.1g的人工肌肉材料IPMC作手指组成的
机械手,在5V的电压下提起了10.3g的石子,所需功率为25mW。如用传统机械装置实
现这个动作,其机构将非常复杂。
20世纪60年代以来,日本以及美国DRAPA等机构不断进行仿肌肉驱动器的研究,但最
近10年材料和新型传动系统的发展才真正实现一系列的突破。目前制作的仿肌肉驱动器
可以分为材料类、机械类和生物类。材料的仿肌肉驱动器主要代表有形状记忆合金、电致
收缩聚合物、压电陶瓷、磁致收缩聚合物、功能凝胶、液晶收缩聚合物等。此类仿肌肉驱
动器的共同特点是模拟动物肌肉收缩产生力这一工作特性,利用材料在不同的外部控制下,
如电压、电流、PH值等,材料内部的成分发生物理变化,产生形变和力。机械类的仿肌
肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收缩器、磁致收缩器等,其中
由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉。不同于材料类仿肌肉驱动
器,机械类仿肌肉驱动器都是结构发生变化,产生收缩和力。生物类的仿肌肉驱动器目前尚处于实验研制阶段,主要是利用动物活体细胞来充当驱动器,美国 DRAPA资助麻省理
工学院研制的鱼形仿生机器人,由活体肌肉驱动,最大速度 45mm/s,而在类人机器人上
尚未进行类似的研究。在这些研究的基础上,瑞士苏黎世大学搭建了拥有“肌腱”和“骨头”
的机器人平台ECCERobot,相关研究成果被美国PopularMechanics报道,并入选当年十
大创新概念之首。此外,波士顿动力还试图研制一款更新型放生肢体,采用 3D打印的方
式,将所有的液压元件直接打印到其机器人肢体的“骨头”结构中,使之更具有仿生元素,
比如“类动脉式的液压管道布局”、看上去很像骨头的支架等。
除了具有仿生结构和仿生运动能力,类脑智能机器人还以脑科学和神经科学的研究为基础,
使机器人以类脑的方式实现对外界的感知和自身的控制。人的运动系统由骨骼、关节和肌
肉组成,相关的肌肉收缩或舒张由中枢神经系统与外周神经系统协同控制。以类脑的方式
实现感知与控制的一体化,这将使得机器人能够模仿外周神经系统感知、中枢神经系统的
输出与多层级反馈回路,从而提高机器人从感知外界信息到自身运动的快速性和准确性。
针对这项技术,瑞士洛桑理工学院于 2015年开发了一个神经系统仿真工具。在该仿真工
具中。研究人员建立了一个数字化的老鼠大脑计算模型和虚拟老鼠身体模型。通过把这两
个模型结合起来,来模拟大脑和身体的相互作用的神经机制,这为类脑机器人的神经系统
模拟提供了基础。目前,他们已在模型中模拟出一只小白鼠完整大脑中约 2100万个神经
元中的3.1万个。虽然,将神经系统和仿生机器人相结合进行研究尚处于初步阶段,但已
经建立的脑网络模型,以及运动神经和各种运动控制上的一系列研究成果,已为类脑智能
机人的感知与控制回路的进一步研究奠定了很好的基础。
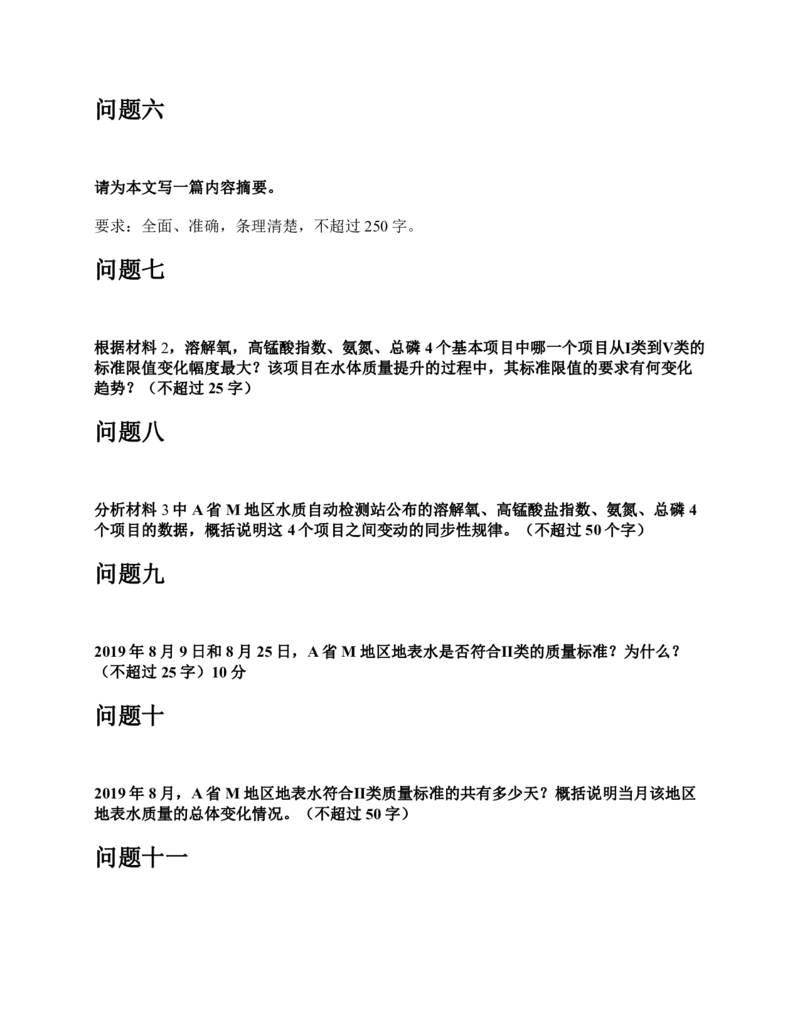
与类脑智能机器人密切相关的技术,如脑机接口,神经假体等,近几年取得了积极的进展。
脑机接口可以使计算机从大脑神经活动获知人的行为意向,其关键在于神经解码,将大脑
的神经信号转化为对外部设备的控制信号,其又分为侵入式脑机接口和非侵入式脑机接口,
其中侵入式脑机接口能在瘫痪病人的大脑运动区植入电极阵列,提取人的运动意向从而控
制机械手臂的动作,非侵入式脑机接口是用紧贴头皮的多个电极采集大脑脑电图信号从而
控制机械臂或飞行器。而在脑神经假体方面,美国DARPA正投资研发一种芯片,通过植
入该芯片可以帮助脑部受伤的人恢复记忆,并干扰甚至消除一些不愉快的记忆(如战争记
忆),此技术已在老鼠身上取得了不错的效果。此外,科研人员在视觉神经假体、运动神
经假体方面也均取得了很好的进展,并已成功应用,以帮助人们恢复部分视觉功能或部分
替代四肢功能。虽然脑机接口和神经假体等方面的研究还有很大的提升空间,但已有的研
究成果为类脑智能机器人的研究提供了很多的借鉴。
在类脑智能机器人研究中,如何从根本上提升机器人的智能,是机器人研究领域的一个重
要问题。经历了长期的发展过程,人们普遍认为机器通常在动力、速度、精巧性方面具有
一定的优势,而人类具有智能、感知、情感等机器部分具有或者不具有的能力和特点,人
们自然希望可以将二者各自的优点融合在一起,实现“人机协作”。早在20世纪50年代,
已有研究人员开展了相关的工作、从具体任务出发(如工业制造),研究离线状态下的人
机交互,让机器人在人的指引下完成任务学习。20世纪90年代,人们开始研究实时交互
问题,将服务机器人与人结合在一起,然而这种协作主要从功能角度使人和机器人共享智
能,并不算真正意义上的融合,在这一过程中,人做一部分工作,机器人做一部分工作,二者分工完成同一任务。近年来,人们更加关注“认知——合作”,机器人作为人的“同事”,
和人在一起工作,智能人机协同需要计算机在陌生的环境通过对周围环境的观察以及周围
环境的反馈刺激、自主整合新旧知识、并进行综合智能决策,即要求计算机具有类脑的交
互学习机制。随着人工智能技术和新材料技术的兴起,智能机器人行业将是未来“脑科学
研究”和“脑认知与类脑计算”研究成果的重要产出方向,在实际的应用场合,新一代的机
器人或者新型人工智能必须要具有通过交互从外界获得知识,并通过智能增长的方式进一
步了解外部世界的能力,建立基于交互的从零学习及智能生长认知模型,能让计算机像婴
儿一样,在与人的交互过程中进行错误纠正与知识积累,实现模仿人类认识外部世界的智
能增长。
在未来,人们希望可以将人的智能更深程度地引入机器人系统,从机理上对人进行模仿,
使机器人能够像人一样思考,从而“配合”人的工作,共同完成任务。由于类脑智能机器人
的研究既涉及到脑科学和神经科学的最新研究成果,又和机器人仿生结构与控制等内容密
切相关,未来的研究迫切需要更多地借鉴类脑计算模型和仿人运动神经机理,从而构建新
的机器人感知、交互和动作计算模型,从根本上提高机器人的智能性,形成具有动态立体
视觉感知、快速自感知、多模态信息融合、运动自学习能力、协调人机协作、快速反应和
高精度操作的类脑智能机器人。其中,尤其需要解决 3个问题:一是类人运动执行机构带
来的类脑运动神经控制;二是人机融合环境带来的机器人多模态信息融合、交互式学习控
制;三是双目可动摄像头带来的摄像头高速在线校准。
材料二
空气中的分子态氧溶解在水中称为溶解氧。在20℃、100kPa
下、纯水里大约溶解氧9mg/L。一些有机化合物在喜氧菌作用下发生生物降解,要消耗水
里的溶解氧,当水中的溶解氧值降到 5mg/L时,一些鱼类的呼吸就发生困难,溶解氧因
空气中氧气的溶入及绿色水生植物的光合作用会不断得到补充,但当水体受到有机物污染,
耗氧严重,溶解氧得不到及时补充,水体中的厌氧菌就会很快繁殖,有机物因腐败而使水
体变黑、发臭。溶解氧值是判断水自净能力的一种依据。水里的溶解氧被消耗,要恢复到
初始状态,所需时问短,说明该水体的自净能力强,或者说水体污染不严重。否则说明水
体污染严重,自净能力弱,甚至失去自净能力。
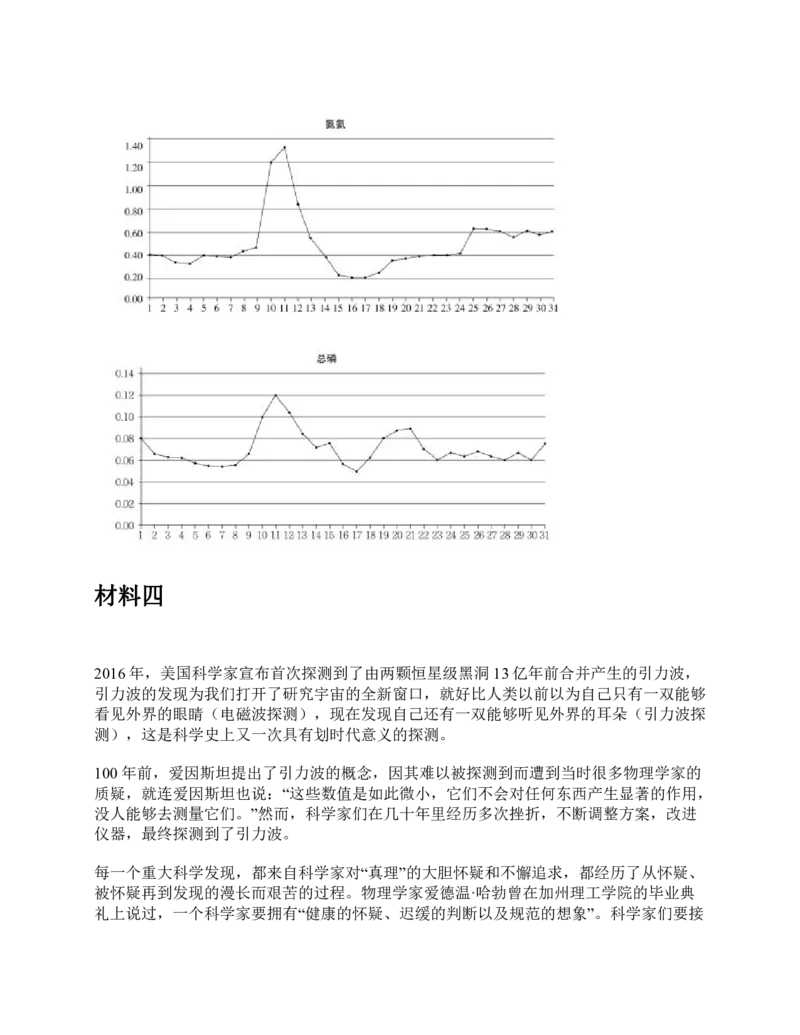
氨氮是指水中以游离氨(NH3)和铵根离子(NH4+)形式存在的氮。氨氮是水中的营养
素,可导致水富营养化现场产生,是水体中的主要耗氧污染物,对鱼类及某些水生生物有
危害。
高锰酸钾盐指数是指在一定条件下,以高锰酸钾为氧化剂,处理水样所需要消耗的氧化剂
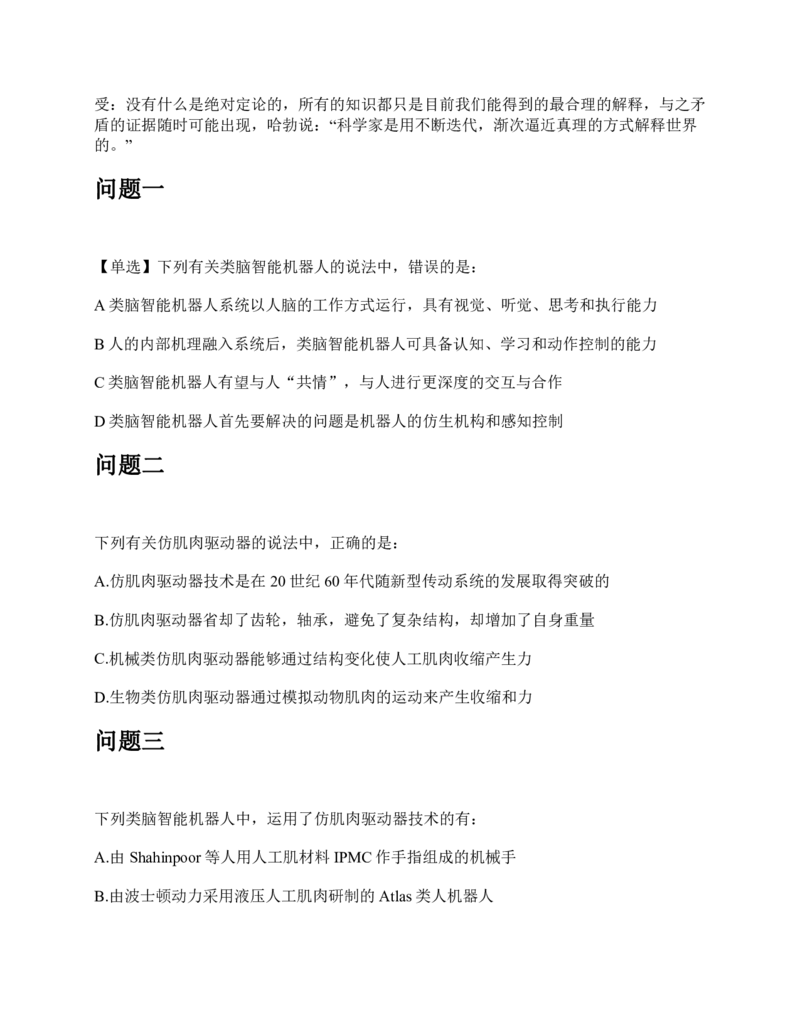
的量。总磷是水样经消解后将各种形态的磷转变成正磷酸盐后测定的结果。其主要来源为生活污
水、化肥、有机磷农药及近代洗涤剂所用的磷酸盐增洁剂等。水体中的磷是藻类生长需要
的关键元素,过量磷会造成水体污秽异臭,使湖泊发生富营养化、海湾出现赤潮。
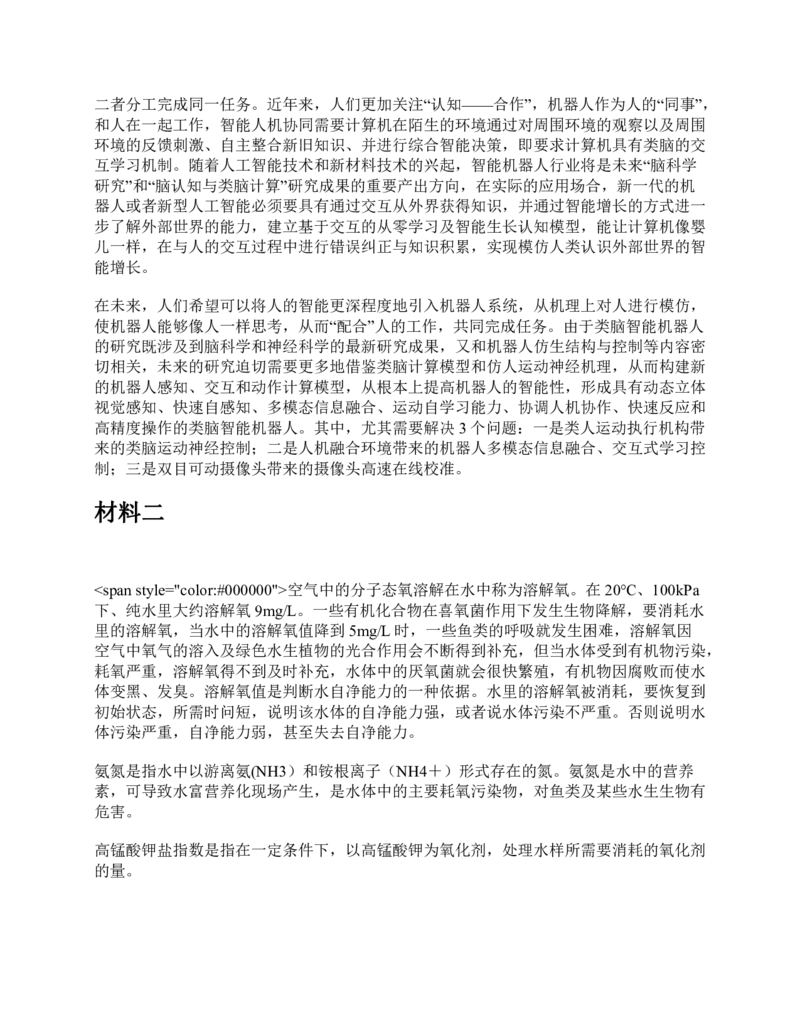
地标水中溶解氧、氨氮、高锰酸钾盐指数及总磷四个项目的标准限制见表 1。
材料三
水质自动监测是由传感器技术、自动测量技术、自动控制技术,计算机 X用技术及配套
专用分析软件,通讯网络所组成的一门综合性技术,监测指标能够反映水体的水质状况,
在一定范围内有各自相对稳定的规律。当自动监测数据异常波动时,通常会有两种情况:
一是多个监测项目同一时段同步走高或走低,这种情况多为水体水质异常造成,但还需从
各监测项目间的关联性、时间序的变化规律等方面进一步分析判断数据异常的原因。
二是只有一个监测项目发生变化,其他项目没有同步变化。这种情况应对出现异常的仪器
进行校准,校准后自动监测数据恢复正常,可判断是仪表故障;校准后依旧异常,应于河
道采水系统断面直接采集水样进行手工监测比对确认。手工监测与自动监测数据相对偏差
大于20%,可判定为仪表故障;相对偏差小于20%,可判定为污染事故。
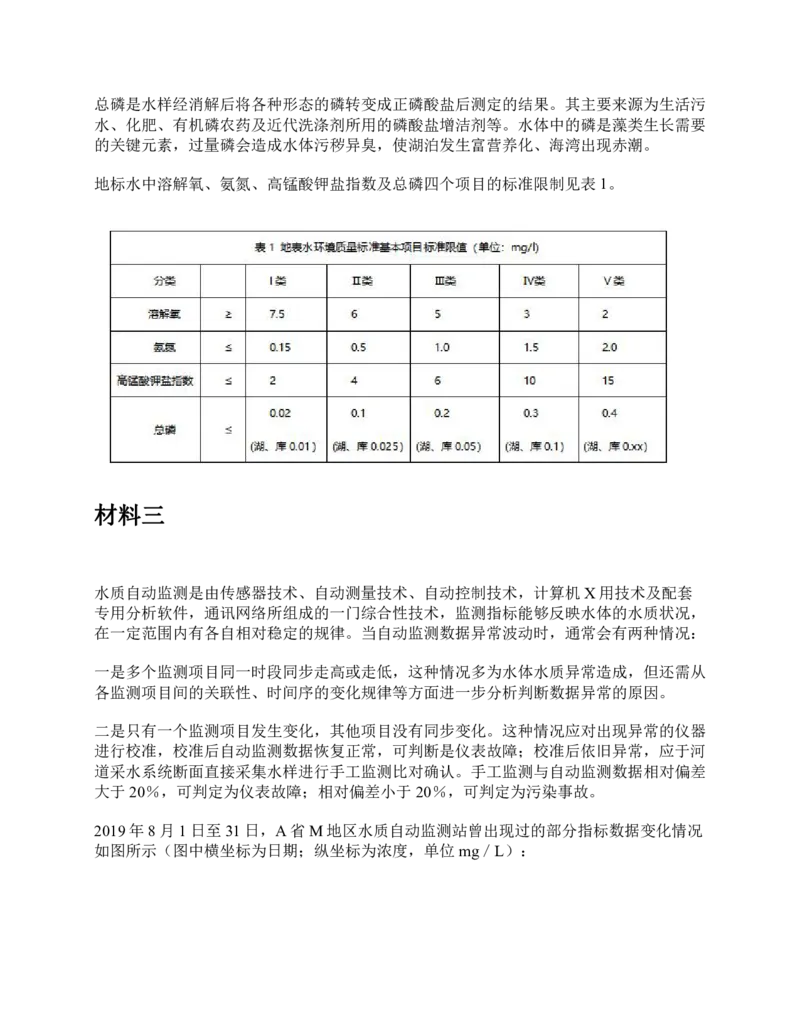
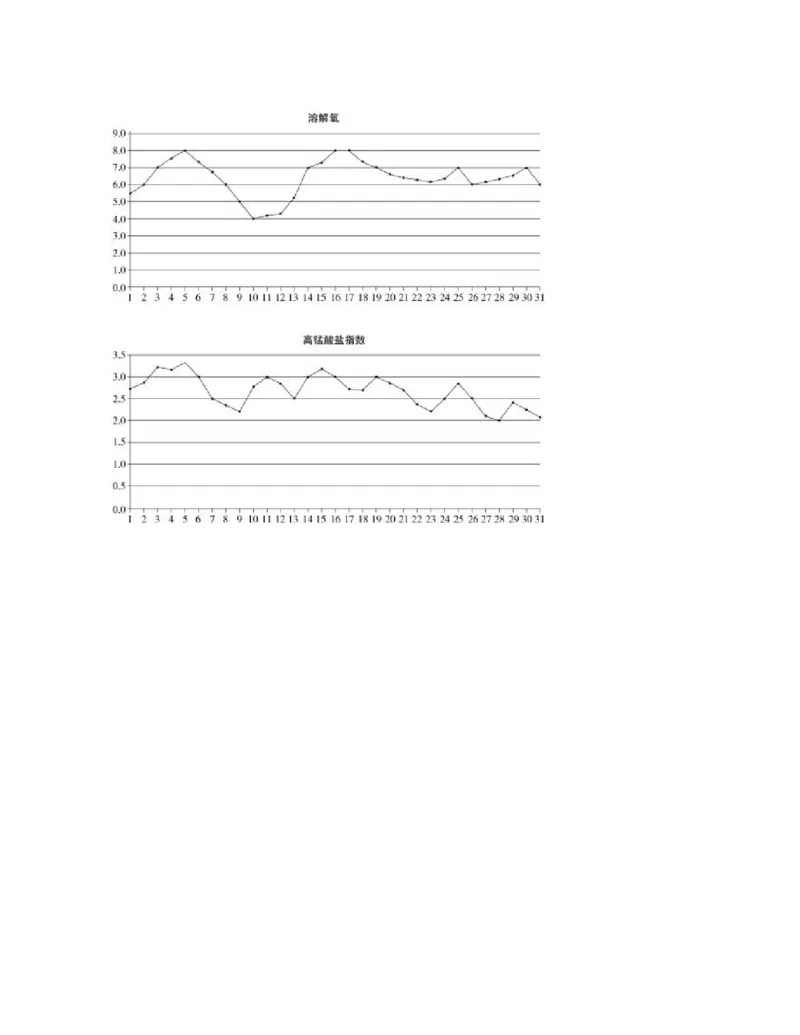
2019年8月1日至31日,A省M地区水质自动监测站曾出现过的部分指标数据变化情况
如图所示(图中横坐标为日期;纵坐标为浓度,单位 mg/L):材料四
2016年,美国科学家宣布首次探测到了由两颗恒星级黑洞13亿年前合并产生的引力波,
引力波的发现为我们打开了研究宇宙的全新窗口,就好比人类以前以为自己只有一双能够
看见外界的眼睛(电磁波探测),现在发现自己还有一双能够听见外界的耳朵(引力波探
测),这是科学史上又一次具有划时代意义的探测。
100年前,爱因斯坦提出了引力波的概念,因其难以被探测到而遭到当时很多物理学家的
质疑,就连爱因斯坦也说:“这些数值是如此微小,它们不会对任何东西产生显著的作用,
没人能够去测量它们。”然而,科学家们在几十年里经历多次挫折,不断调整方案,改进
仪器,最终探测到了引力波。
每一个重大科学发现,都来自科学家对“真理”的大胆怀疑和不懈追求,都经历了从怀疑、
被怀疑再到发现的漫长而艰苦的过程。物理学家爱德温·哈勃曾在加州理工学院的毕业典
礼上说过,一个科学家要拥有“健康的怀疑、迟缓的判断以及规范的想象”。科学家们要接受:没有什么是绝对定论的,所有的知识都只是目前我们能得到的最合理的解释,与之矛
盾的证据随时可能出现,哈勃说:“科学家是用不断迭代,渐次逼近真理的方式解释世界
的。”
问题一
【单选】下列有关类脑智能机器人的说法中,错误的是:
A类脑智能机器人系统以人脑的工作方式运行,具有视觉、听觉、思考和执行能力
B人的内部机理融入系统后,类脑智能机器人可具备认知、学习和动作控制的能力
C类脑智能机器人有望与人“共情”,与人进行更深度的交互与合作
D类脑智能机器人首先要解决的问题是机器人的仿生机构和感知控制
问题二
下列有关仿肌肉驱动器的说法中,正确的是:
A.仿肌肉驱动器技术是在20世纪60年代随新型传动系统的发展取得突破的
B.仿肌肉驱动器省却了齿轮,轴承,避免了复杂结构,却增加了自身重量
C.机械类仿肌肉驱动器能够通过结构变化使人工肌肉收缩产生力
D.生物类仿肌肉驱动器通过模拟动物肌肉的运动来产生收缩和力
问题三
下列类脑智能机器人中,运用了仿肌肉驱动器技术的有:
A.由Shahinpoor等人用人工肌材料IPMC作手指组成的机械手
B.由波士顿动力采用液压人工肌肉研制的 Atlas类人机器人C.由美国DRAPA资助麻省理工学院研制的鱼形仿生机器人
D.由瑞士苏黎世大学搭建的ECCERobot机器人平台
问题四
根据文章内容,下列说法正确的有:
A.人工智能、机器人和传感器技术的发展及其与脑科学研完成果的结合是有望成功制造类
脑智能机器人的基础
B.脑科学和神经科学的研究和应用可以帮助机器人提高感知外界的快速性和准确性
C.科学家用一只小白鼠脑中的3.1万个神经元建立了一个数字化的老鼠大脑计算模型
D.脑网络模型及其运动神经和运动控制是通过神经系统和仿生机器人相结合而建立的
问题五
下图总结了文章第七自然段中“脑机接口”“神经假体”的分类情况、各类别功能。请在答
题卡相应的序号后写出符合图中分类指向关系的内容。每项不超过答题卡上的规定字数。问题六
请为本文写一篇内容摘要。
要求:全面、准确,条理清楚,不超过250字。
问题七
根据材料 2,溶解氧,高锰酸指数、氨氮、总磷 4个基本项目中哪一个项目从Ⅰ类到Ⅴ类的
标准限值变化幅度最大?该项目在水体质量提升的过程中,其标准限值的要求有何变化
趋势?(不超过 25字)
问题八
分析材料 3中 A省 M地区水质自动检测站公布的溶解氧、高锰酸盐指数、氨氮、总磷 4
个项目的数据,概括说明这 4个项目之间变动的同步性规律。(不超过 50个字)
问题九
2019年 8月 9日和8月25日,A省M地区地表水是否符合Ⅱ类的质量标准?为什么?
(不超过 25字)10分
问题十
2019年 8月,A省M地区地表水符合Ⅱ类质量标准的共有多少天?概括说明当月该地区
地表水质量的总体变化情况。(不超过 50字)
问题十一请根据给定材料,以“怀疑与坚持——从引力波的发现谈起”为题,写一篇议论文。
要求:观点明确,论证充分,逻辑严谨,语言流畅,字数 800~1000字。
参考答案
问题一
第一步——审题
提取题干关键词,定位材料。
单项选择题:备选项中只有一个最符合题意,请用2B铅笔在答题卡相应的题号后填涂正
确选项的序号。【单项选择题,考生只需要选一个最符合题意的选项即可,并按要求填涂
在答题卡对应的位置上。】
下列有关类脑智能机器人的说法中,错误的是:
A.类脑智能机器人系统以人脑的工作方式运行,具有视觉、听觉、思考和执行能力
B.人的内部机理融入系统后,类脑智能机器人可具备认知、学习和动作控制的能力
C.类脑智能机器人有望与人“共情”,与人进行更深度的交互与合作
D.类脑智能机器人首先要解决的问题是机器人的仿生机构和感知控制
【本题属于细节查找题,题干的“类脑智能机器人”为材料主题,不具备直接定位作用,
因此需要借助选项逐一定位材料,并结合前后句,对照选项与原文意思是否一致;本题为
选非题,需要选择一个错误选项。】
第二步——定位资料,提取要点
A.类脑智能机器人系统以人脑的工作方式运行,具有视觉、听觉、思考和执行能力
〖通过选项关键词“人脑”“视觉、听觉、思考和执行能力”可以定位到第2段。〗
段2:随着人工智能、机器人和传感器技术的不断发展,机器人已经由传统在线示教工作
模式向智能工作模式方向发展,结合脑科学研究成果,机器人理论和应用研究有望迎来新的突破,甚至可成功制造出类脑智能机器人。类脑智能机器人系统是融合了视觉、听觉、
思考和执行等能力的综合智能系统,它能够以类似于人脑的工作方式运行。同时,类脑智
能机器人力图将人的内部机理融入机器人系统,从而提高机器人的认知、学习和动作控制
能力,通过融入对人的机理的探索,类脑智能机器人有望实现与人“共情”,从而产生更
深度的交互与合作。
〖根据原文“类脑智能机器人系统是融合了视觉、听觉、思考和执行等能力的综合智能系
统,它能够以类似于人脑的工作方式运行。”可知,类脑智能机器人系统以类似于人脑的
工作方式运行,这与选项“以人脑的工作方式运行”的意思不一致,属于偷换概念。由此
可以得出要点:A项错误,当选。〗
B.人的内部机理融入系统后,类脑智能机器人可具备认知、学习和动作控制的能力
〖通过选项关键词“人的内部机理”“认知、学习和动作控制的能力”可以定位到第2
段。〗
段2:随着人工智能、机器人和传感器技术的不断发展,机器人已经由传统在线示教工作
模式向智能工作模式方向发展,结合脑科学研究成果,机器人理论和应用研究有望迎来新
的突破,甚至可成功制造出类脑智能机器人。类脑智能机器人系统是融合了视觉、听觉、
思考和执行等能力的综合智能系统,它能够以类似于人脑的工作方式运行。同时,类脑智
能机器人力图将人的内部机理融入机器人系统,从而提高机器人的认知、学习和动作控制
能力,通过融入对人的机理的探索,类脑智能机器人有望实现与人“共情”,从而产生更
深度的交互与合作。
〖根据原文“类脑智能机器人力图将人的内部机理融入机器人系统,从而提高机器人的认
知、学习和动作控制能力,”可知,内部机理融入机器人系统后,机器人就可以具备认知、
学习和动作控制的能力。由此可以得出要点:B项正确,排除。〗
C.类脑智能机器人有望与人“共情”,与人进行更深度的交互与合作
〖通过选项关键词“‘共情’”可以定位到第2段。〗
段2:随着人工智能、机器人和传感器技术的不断发展,机器人已经由传统在线示教工作
模式向智能工作模式方向发展,结合脑科学研究成果,机器人理论和应用研究有望迎来新
的突破,甚至可成功制造出类脑智能机器人。类脑智能机器人系统是融合了视觉、听觉、
思考和执行等能力的综合智能系统,它能够以类似于人脑的工作方式运行。同时,类脑智
能机器人力图将人的内部机理融入机器人系统,从而提高机器人的认知、学习和动作控制
能力,通过融入对人的机理的探索,类脑智能机器人有望实现与人“共情”,从而产生更
深度的交互与合作。〖根据原文“类脑智能机器人有望实现与人‘共情’,从而产生更深度的交互与合作”可
知,类脑智能机器人有望与人“共情”,与人进行更深度的交互与合作,这与选项表述一
致。由此可以得出要点:C项正确,排除。〗
D.类脑智能机器人首先要解决的问题是机器人的仿生机构和感知控制
〖通过选项关键词“机器人”、“仿生机构”、“感知控制”可以定位到第3段。〗
段3:类脑智能机器人首先涉及的是机器人的仿生结构和感知控制,而仿肌肉驱动器是其
中的重要部分。这些仿肌肉驱动器可以省却齿轮,轴承,避免复杂的结构,同时减轻重量,
具有更好的应用效果。如Shahinpoor等人用4片重0.1g的人工肌肉材料IPMC作手指组
成的机械手,在5V的电压下提起了10.3g的石子,所需功率为25mW。如用传统机械装置
实现这个动作,其机构将非常复杂。
〖根据原文“类脑智能机器人首先涉及的是机器人的仿生结构和感知控制,而仿肌肉驱动
器是其中的重要部分。”可知,机器人的仿生结构和感知控制是类脑智能机器人首先要解
决的问题,这与选项意思一致。由此可以得出要点:D项正确,排除。〗
第三步——按题目要求整理要点
【单项选择题:备选项中只有一个最符合题意,请用 2B铅笔在答题卡相应的题号后填涂
正确选项的序号。】
【答案】A
问题二
第一步——审题
提取题干关键词,定位材料。
单项选择题:备选项中只有一个最符合题意,请用2B铅笔在答题卡相应的题号后填涂正
确选项的序号。【单项选择题,考生只需要选一个最符合题意的选项即可,并按要求填涂
在答题卡对应的位置上。】
下列有关仿肌肉驱动器的说法中,正确的是:
A.仿肌肉驱动器技术是在20世纪60年代随新型传动系统的发展取得突破的
B.仿肌肉驱动器省却了齿轮,轴承,避免了复杂结构,却增加了自身重量C.机械类仿肌肉驱动器能够通过结构变化使人工肌肉收缩产生力
D.生物类仿肌肉驱动器通过模拟动物肌肉的运动来产生收缩和力
【本题属于细节查找题,根据题干的“仿肌肉驱动器”可定位到第三段和第四段,在此基
础上可结合选项关键词进行二次精准定位,并结合前后句,对照选项与原文意思是否一致;
本题为选是题,需要选择一个正确选项。】
第二步——定位资料,提取要点
A.仿肌肉驱动器技术是在20世纪60年代随新型传动系统的发展取得突破的
〖通过选项关键词“20世纪60年代”可以定位到第4段。〗
段4:20世纪60年代以来,日本以及美国DRAPA等机构不断进行仿肌肉驱动器的研究,
但最近10年材料和新型传动系统的发展才真正实现一系列的突破。目前制作的仿肌肉驱
动器可以分为材料类、机械类和生物类。材料类的仿肌肉驱动器主要代表有形状记忆合金、
电致收缩聚合物、压电陶瓷、磁致收缩聚合物、功能凝胶、液晶收缩聚合物等。此类仿肌
肉驱动器的共同特点是模拟动物肌肉收缩产生力这一工作特性,利用材料在不同的外部控
制下,如电压、电流、PH值等,材料内部的成分发生物理变化,产生形变和力。机械类
的仿肌肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收缩器、磁致收缩器等,
其中由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉,不同于材料类仿肌肉
驱动器,机械类仿肌肉驱动器都是结构发生变化,产生收缩和力。生物类的仿肌肉驱动器
目前尚处于实验研制阶段,主要是利用动物活体细胞来充当驱动器,美国 DRAPA资助麻省
理工学院研制的鱼形仿生机器人,由活体肌肉驱动,最大速度 45mm/s,而在类人机器人
上尚未进行类似的研究。在这些研究的基础上,瑞士苏黎世大学搭建了拥有“肌腱”和
“骨头”的机器人平台ECCERobot,相关研究成果被美国Popular Mechanics报道,并入
选当年十大创新概念之首。此外,波士顿动力还试图研制一款更新型放生肢体,采用 3D
打印的方式,将所有的液压元件直接打印到其机器人肢体的“骨头”结构中,使之更具有
仿生元素,比如“类动脉式的液压管道布局”、看上去很像骨头的支架等。
〖根据原文“20世纪60年代以来,日本以及美国DRAPA等机构不断进行仿肌肉驱动器的
研究,但最近10年材料和新型传动系统的发展才真正实现一系列的突破。”可知,实现
突破的时间是最近10年,而非选项所述的“20世纪60年代”,属于偷换概念。由此可
以得出要点:A项错误,排除。〗
B.仿肌肉驱动器省却了齿轮,轴承,避免了复杂结构,却增加了自身重量
〖通过选项关键词“齿轮”“轴承”可以定位到第3段。〗段3:类脑智能机器人首先涉及的是机器人的仿生结构和感知控制,而仿肌肉驱动器是其
中的重要部分。这些仿肌肉驱动器可以省却齿轮,轴承,避免复杂的结构,同时减轻重量,
具有更好的应用效果。如Shahinpoor等人用4片重0.1g的人工肌肉材料IPMC作手指组
成的机械手,在5V的电压下提起了10.3g的石子,所需功率为25mW。如用传统机械装置
实现这个动作,其机构将非常复杂。
〖根据原文“这些仿肌肉驱动器可以省却齿轮,轴承,避免复杂的结构,同时减轻重量,
具有更好的应用效果。”可知,仿肌肉驱动器在省却齿轮,轴承,避免复杂的结构的同时
减轻了自身重量,这与选项“增加了自身重量”的表述不一致,属于颠倒是非。由此可以
得出要点:B项错误,排除。〗
C.机械类仿肌肉驱动器能够通过结构变化使人工肌肉收缩产生力
〖通过选项关键词“机械类仿肌肉驱动器”和“人工肌肉”可以定位到第4段。〗
段4:20世纪60年代以来,日本以及美国DRAPA等机构不断进行仿肌肉驱动器的研究,
但最近10年材料和新型传动系统的发展才真正实现一系列的突破。目前制作的仿肌肉驱
动器可以分为材料类、机械类和生物类。材料类的仿肌肉驱动器主要代表有形状记忆合金、
电致收缩聚合物、压电陶瓷、磁致收缩聚合物、功能凝胶、液晶收缩聚合物等。此类仿肌
肉驱动器的共同特点是模拟动物肌肉收缩产生力这一工作特性,利用材料在不同的外部控
制下,如电压、电流、PH值等,材料内部的成分发生物理变化,产生形变和力。机械类
的仿肌肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收缩器、磁致收缩器等,
其中由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉,不同于材料类仿肌肉
驱动器,机械类仿肌肉驱动器都是结构发生变化,产生收缩和力。生物类的仿肌肉驱动器
目前尚处于实验研制阶段,主要是利用动物活体细胞来充当驱动器,美国 DRAPA资助麻省
理工学院研制的鱼形仿生机器人,由活体肌肉驱动,最大速度 45mm/s,而在类人机器人
上尚未进行类似的研究。在这些研究的基础上,瑞士苏黎世大学搭建了拥有“肌腱”和
“骨头”的机器人平台ECCERobot,相关研究成果被美国Popular Mechanics报道,并入
选当年十大创新概念之首。此外,波士顿动力还试图研制一款更新型放生肢体,采用 3D
打印的方式,将所有的液压元件直接打印到其机器人肢体的“骨头”结构中,使之更具有
仿生元素,比如“类动脉式的液压管道布局”、看上去很像骨头的支架等。
〖根据原文“机械类的仿肌肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收
缩器、磁致收缩器等,其中由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉,
不同于材料类仿肌肉驱动器,机械类仿肌肉驱动器都是结构发生变化,产生收缩和力。”
可知,机械类仿肌肉驱动器能够通过结构变化使人工肌肉收缩而产生力,这与选项表述一
致。由此可以得出要点:C项正确,当选。〗
D.生物类仿肌肉驱动器通过模拟动物肌肉的运动来产生收缩和力
〖通过选项关键词“生物类仿肌肉驱动器”或“模拟动物肌肉”均可以定位到第4段。〗段4:20世纪60年代以来,日本以及美国DRAPA等机构不断进行仿肌肉驱动器的研究,
但最近10年材料和新型传动系统的发展才真正实现一系列的突破。目前制作的仿肌肉驱
动器可以分为材料类、机械类和生物类。材料类的仿肌肉驱动器主要代表有形状记忆合金、
电致收缩聚合物、压电陶瓷、磁致收缩聚合物、功能凝胶、液晶收缩聚合物等。此类仿肌
肉驱动器的共同特点是模拟动物肌肉收缩产生力这一工作特性,利用材料在不同的外部控
制下,如电压、电流、PH值等,材料内部的成分发生物理变化,产生形变和力。机械类
的仿肌肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收缩器、磁致收缩器等,
其中由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉,不同于材料类仿肌肉
驱动器,机械类仿肌肉驱动器都是结构发生变化,产生收缩和力。生物类的仿肌肉驱动器
目前尚处于实验研制阶段,主要是利用动物活体细胞来充当驱动器,美国 DRAPA资助麻省
理工学院研制的鱼形仿生机器人,由活体肌肉驱动,最大速度 45mm/s,而在类人机器人
上尚未进行类似的研究。在这些研究的基础上,瑞士苏黎世大学搭建了拥有“肌腱”和
“骨头”的机器人平台ECCERobot,相关研究成果被美国Popular Mechanics报道,并入
选当年十大创新概念之首。此外,波士顿动力还试图研制一款更新型放生肢体,采用 3D
打印的方式,将所有的液压元件直接打印到其机器人肢体的“骨头”结构中,使之更具有
仿生元素,比如“类动脉式的液压管道布局”、看上去很像骨头的支架等。
〖(1)根据原文“生物类的仿肌肉驱动器目前尚处于实验研制阶段,主要是利用动物活
体细胞来充当驱动器,美国 DRAPA资助麻省理工学院研制的鱼形仿生机器人,由活体肌肉
驱动,最大速度45mm/s,而在类人机器人上尚未进行类似的研究。”可知,原文并未提
及生物类仿肌肉驱动器会产生收缩和力及其产生的方式,这与选项表述不一致,属于无中
生有。(2)根据原文“材料类的仿肌肉驱动器主要代表有形状记忆合金、电致收缩聚合
物、压电陶瓷、磁致收缩聚合物、功能凝胶、液晶收缩聚合物等。此类仿肌肉驱动器的共
同特点是模拟动物肌肉收缩产生力这一工作特性。”可知,通过模拟动物肌肉收缩产生力
的是材料类仿肌肉驱动器,而非选项所述的“生物类仿肌肉驱动器”,属于偷换概念。由
此综合可以得出要点:D项错误,排除。〗
第三步——按题目要求整理要点
【单项选择题:备选项中只有一个最符合题意,请用 2B铅笔在答题卡相应的题号后填涂
正确选项的序号。】
【答案】C
问题三
第一步——审题
提取题干关键词,定位材料。多项选择题:备选项中有两个或两个以上符合题意,请用 2B铅笔在答题卡相应的题号后
填涂正确选项的序号,错选、少选均不得分。【多项选择题,考生至少要选出 2个符合题
意的选项,错选、少选均不得分。】
下列类脑智能机器人中,运用了仿肌肉驱动器技术的有:
A.由Shahinpoor等人用人工肌材料IPMC作手指组成的机械手
B.由波士顿动力采用液压人工肌肉研制的Atlas类人机器人
C.由美国DRAPA资助麻省理工学院研制的鱼形仿生机器人
D.由瑞士苏黎世大学搭建的ECCE Robot机器人平台
【本题属于细节查找题,题干虽有“类脑机器人”“仿肌肉驱动器技术”等专有名词,但
这两者在材料中多次出现,不具备快速、精准的定位作用,因此利用选项逐一定位材料进
行判断即可解答此题。】
第二步——定位资料,提取要点
A.由Shahinpoor等人用人工肌材料IPMC作手指组成的机械手
〖通过选项关键词“Shahinpoor”和“IPMC”可以定位到第3段。〗
段3:类脑智能机器人首先涉及的是机器人的仿生结构和感知控制,而仿肌肉驱动器是其
中的重要部分。这些仿肌肉驱动器可以省却齿轮,轴承,避免复杂的结构,同时减轻重量,
具有更好的应用效果。如Shahinpoor等人用4片重0.1g的人工肌肉材料IPMC作手指组
成的机械手,在5V的电压下提起了10.3g的石子,所需功率为25mW。如用传统机械装置
实现这个动作,其机构将非常复杂。
〖根据原文“这些仿肌肉驱动器可以省却齿轮,轴承,避免复杂的结构,同时减轻重量,
具有更好的应用效果。如Shahinpoor等人用4片重0.1g的人工肌肉材料IPMC作手指组
成的机械手,在5V的电压下提起了10.3g的石子,所需功率为25mW。”可知,
Shahinpoor等人用人工肌材料IPMC作手指组成的机械手就是对仿肌肉驱动器的具体应用,
符合题干要求。由此可以得出要点:A项正确,当选。〗
B.由波士顿动力采用液压人工肌肉研制的Atlas类人机器人
〖通过选项关键词“波士顿动力”和“Atlas类人机器人”可以定位到第4段。〗段4:20世纪60年代以来,日本以及美国DRAPA等机构不断进行仿肌肉驱动器的研究,
但最近10年材料和新型传动系统的发展才真正实现一系列的突破。目前制作的仿肌肉驱
动器可以分为材料类、机械类和生物类。材料类的仿肌肉驱动器主要代表有形状记忆合金、
电致收缩聚合物、压电陶瓷、磁致收缩聚合物、功能凝胶、液晶收缩聚合物等。此类仿肌
肉驱动器的共同特点是模拟动物肌肉收缩产生力这一工作特性,利用材料在不同的外部控
制下,如电压、电流、PH值等,材料内部的成分发生物理变化,产生形变和力。机械类
的仿肌肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收缩器、磁致收缩器等,
其中由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉,不同于材料类仿肌肉
驱动器,机械类仿肌肉驱动器都是结构发生变化,产生收缩和力。生物类的仿肌肉驱动器
目前尚处于实验研制阶段,主要是利用动物活体细胞来充当驱动器,美国 DRAPA资助麻省
理工学院研制的鱼形仿生机器人,由活体肌肉驱动,最大速度 45mm/s,而在类人机器人
上尚未进行类似的研究。在这些研究的基础上,瑞士苏黎世大学搭建了拥有“肌腱”和
“骨头”的机器人平台ECCERobot,相关研究成果被美国Popular Mechanics报道,并入
选当年十大创新概念之首。此外,波士顿动力还试图研制一款更新型放生肢体,采用 3D
打印的方式,将所有的液压元件直接打印到其机器人肢体的“骨头”结构中,使之更具有
仿生元素,比如“类动脉式的液压管道布局”、看上去很像骨头的支架等。
〖根据原文“机械类的仿肌肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收
缩器、磁致收缩器等,其中由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉”
可知,由波士顿动力Atlas类人机器人用到的是机械类仿肌肉驱动器,应用了仿肌肉驱动
器技术,符合题干要求。由此可以得出要点:B项正确,当选。〗
C.由美国DRAPA资助麻省理工学院研制的鱼形仿生机器人
〖通过选项关键词“美国DRAPA”、“麻省理工学院”和“鱼形仿生机器人”可以定位到
第4段。〗
段4:20世纪60年代以来,日本以及美国DRAPA等机构不断进行仿肌肉驱动器的研究,
但最近10年材料和新型传动系统的发展才真正实现一系列的突破。目前制作的仿肌肉驱
动器可以分为材料类、机械类和生物类。材料类的仿肌肉驱动器主要代表有形状记忆合金、
电致收缩聚合物、压电陶瓷、磁致收缩聚合物、功能凝胶、液晶收缩聚合物等。此类仿肌
肉驱动器的共同特点是模拟动物肌肉收缩产生力这一工作特性,利用材料在不同的外部控
制下,如电压、电流、PH值等,材料内部的成分发生物理变化,产生形变和力。机械类
的仿肌肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收缩器、磁致收缩器等,
其中由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉,不同于材料类仿肌肉
驱动器,机械类仿肌肉驱动器都是结构发生变化,产生收缩和力。生物类的仿肌肉驱动器
目前尚处于实验研制阶段,主要是利用动物活体细胞来充当驱动器,美国 DRAPA资助麻省
理工学院研制的鱼形仿生机器人,由活体肌肉驱动,最大速度 45mm/s,而在类人机器人
上尚未进行类似的研究。在这些研究的基础上,瑞士苏黎世大学搭建了拥有“肌腱”和
“骨头”的机器人平台ECCERobot,相关研究成果被美国Popular Mechanics报道,并入
选当年十大创新概念之首。此外,波士顿动力还试图研制一款更新型放生肢体,采用 3D打印的方式,将所有的液压元件直接打印到其机器人肢体的“骨头”结构中,使之更具有
仿生元素,比如“类动脉式的液压管道布局”、看上去很像骨头的支架等。
〖根据原文“生物类的仿肌肉驱动器目前尚处于实验研制阶段,主要是利用动物活体细胞
来充当驱动器,美国DRAPA资助麻省理工学院研制的鱼形仿生机器人,由活体肌肉驱动,
最大速度45mm/s,而在类人机器人上尚未进行类似的研究。”可知,美国DRAPA资助麻
省理工学院研制的鱼形仿生机器人是对生物类仿肌肉驱动器的具体应用,用到了仿肌肉驱
动技术,符合题干要求。由此可以得出要点:C项正确,当选。〗
D.由瑞士苏黎世大学搭建的ECCE Robot机器人平台
〖通过选项关键词“瑞士苏黎世大学”“ECCE Robot”可以定位到第4段。〗
段4:20世纪60年代以来,日本以及美国DRAPA等机构不断进行仿肌肉驱动器的研究,
但最近10年材料和新型传动系统的发展才真正实现一系列的突破。目前制作的仿肌肉驱
动器可以分为材料类、机械类和生物类。材料类的仿肌肉驱动器主要代表有形状记忆合金、
电致收缩聚合物、压电陶瓷、磁致收缩聚合物、功能凝胶、液晶收缩聚合物等。此类仿肌
肉驱动器的共同特点是模拟动物肌肉收缩产生力这一工作特性,利用材料在不同的外部控
制下,如电压、电流、PH值等,材料内部的成分发生物理变化,产生形变和力。机械类
的仿肌肉驱动器,主要代表有气动人工肌肉、液压人工肌肉、电致收缩器、磁致收缩器等,
其中由波士顿动力研制的Atlas类人机器人就采用了液压人工肌肉,不同于材料类仿肌肉
驱动器,机械类仿肌肉驱动器都是结构发生变化,产生收缩和力。生物类的仿肌肉驱动器
目前尚处于实验研制阶段,主要是利用动物活体细胞来充当驱动器,美国 DRAPA资助麻省
理工学院研制的鱼形仿生机器人,由活体肌肉驱动,最大速度 45mm/s,而在类人机器人
上尚未进行类似的研究。在这些研究的基础上,瑞士苏黎世大学搭建了拥有“肌腱”和
“骨头”的机器人平台ECCERobot,相关研究成果被美国Popular Mechanics报道,并入
选当年十大创新概念之首。此外,波士顿动力还试图研制一款更新型放生肢体,采用 3D
打印的方式,将所有的液压元件直接打印到其机器人肢体的“骨头”结构中,使之更具有
仿生元素,比如“类动脉式的液压管道布局”、看上去很像骨头的支架等。
〖根据原文“在这些研究的基础上,瑞士苏黎世大学搭建了拥有“肌腱”和“骨头”的机
器人平台ECCERobot,相关研究成果被美国Popular Mechanics报道,并入选当年十大创
新概念之首。”可知,ECCE Robot机器人平台是在这些研究的基础上搭建的,根据前文
信息,“这些研究”指三类仿肌肉驱动器的研究,故ECCE Robot机器人平台也用到了仿
肌肉驱动技术,符合题干要求。由此可以得出要点:D项正确,当选。〗
第三步——按题目要求整理要点
【多项选择题:备选项中有两个或两个以上符合题意,请用 2B铅笔在答题卡相应的题号
后填涂正确选项的序号,错选、少选均不得分。】【答案】ABCD
问题四
提取题干关键词,定位材料。
多项选择题:备选项中有两个或两个以上符合题意,请用 2B铅笔在答题卡相应的题号后
填涂正确选项的序号,错选、少选均不得分。【多项选择题,考生至少要选出 2个符合题
意的选项,错选、少选均不得分。】
根据文章内容,下列说法正确的有:
A.人工智能、机器人和传感器技术的发展及其与脑科学研完成果的结合是有望成功制造类
脑智能机器人的基础
B.脑科学和神经科学的研究和应用可以帮助机器人提高感知外界的快速性和准确性
C.科学家用一只小白鼠脑中的 3.1万个神经元建立了一个数字化的老鼠大脑计算模型
D.脑网络模型及其运动神经和运动控制是通过神经系统和仿生机器人相结合而建立的
【本题属于细节查找题,题干尚未给出可以帮助定位的关键词,因此需要借助选项逐一定
位材料,并结合前后句,对照选项与原文意思是否一致;本题为选是题,需要选出所有正
确的选项。】
第二步——定位资料,提取要点
A.人工智能、机器人和传感器技术的发展及其与脑科学研究成果的结合是有望成功制造类
脑智能机器人的基础
〖通过选项关键词“人工智能、机器人和传感器技术”或“脑科学研究成果”可以定位到
第2段。〗
段2:随着人工智能、机器人和传感器技术的不断发展,机器人已经由传统在线示教工作
模式向智能工作模式方向发展,结合脑科学研究成果,机器人理论和应用研究有望迎来新
的突破,甚至可成功制造出类脑智能机器人。类脑智能机器人系统是融合了视觉、听觉、
思考和执行等能力的综合智能系统,它能够以类似于人脑的工作方式运行。同时,类脑智
能机器人力图将人的内部机理融入机器人系统,从而提高机器人的认知、学习和动作控制
能力,通过融入对人的机理的探索,类脑智能机器人有望实现与人“共情”,从而产生更
深度的交互与合作。〖根据原文“随着人工智能、机器人和传感器技术的不断发展,机器人已经由传统在线示
教工作模式向智能工作模式方向发展,结合脑科学研究成果,机器人理论和应用研究有望
迎来新的突破,甚至可成功制造出类脑智能机器人。”可知,人工智能、机器人和传感器
技术的不断发展,并与脑科学的研究结果相结合,有望突破机器人理论和应用研究,最终
甚至可成功制造出类脑智能机器人,与选项“人工智能、机器人和传感器技术的发展及其
与脑科学研完成果的结合是有望成功制造类脑智能机器人的基础”表述的意思一致。由此
可以得出要点:A项正确,当选。〗
B.脑科学和神经科学的研究和应用可以帮助机器人提高感知外界的快速性和准确性
〖通过选项关键词“脑科学”“神经科学”“快速性”“精准性”可以定位到第5段。〗
段5:除了具有仿生结构和仿生运动能力,类脑智能机器人还以脑科学和神经科学的研究
为基础,使机器人以类脑的方式实现对外界的感知和自身的控制。人的运动系统由骨骼、
关节和肌肉组成,相关的肌肉收缩或舒张由中枢神经系统与外周神经系统协同控制。以类
脑的方式实现感知与控制的一体化,使得机器人能够模仿外周神经系统感知、中枢神经系
统的输出与多层级反馈回路,实现机器人从感知外界信息到自身运动的快速性和准确性。
〖(1)根据原文“除了具有仿生结构和仿生运动能力,类脑智能机器人还以脑科学和神
经科学的研究为基础,使机器人以类脑的方式实现对外界的感知和自身的控制”可知,脑
科学和神经科学的研究和应用可以让机器人实现对外界的感知。(2)根据原文“使得机
器人能够模仿外周神经系统感知、中枢神经系统的输出与多层级反馈回路,实现机器人从
感知外界信息到自身运动的快速性和准确性”可知,机器人主要通过类脑和模仿外周神经
系统的方式来感知外界信息,因此,脑科学与神经科学的研究和应用最终可以提高机器人
感知外界信息的快速性和准确性,这与选项意思一致,由此可以得出要点:B项正确,当
选。〗
C.科学家用一只小白鼠脑中的 3.1万个神经元建立了一个数字化的老鼠大脑计算模型
〖通过选项中的数字“3.1”可以定位到第6段。〗
段6:针对这项技术,瑞士洛桑理工学院于2015年开发了一个神经系统仿真工具。在该
仿真工具中,研究人员建立了一个数字化的老鼠大脑计算模型和虚拟老鼠身体模型,通过
把这两个模型结合起来,来模拟大脑和身体的互作用的神经机制,这为类脑机器人的神经
系统模拟提供了基础。目前,他们已在模型中模拟出一只小白鼠完整大脑中约 2100万个
神经元中的3.1万个模拟神经元。虽然,将神经系统和仿生机器人相结合进行研究,还只
是处在初步阶段,但已经建立的脑网络模型,以及运动神经和各种运动控制上的一系列研
究成果,已为类脑智能机器人的感知与控制回路的进一步研究奠定了很好的基础。〖根据原文“在该仿真工具中,研究人员建立了一个数字化的老鼠大脑计算模型和虚拟老
鼠身体模型,通过把这两个模型结合起来,来模拟大脑和身体的互作用的神经机制,这为
类脑机器人的神经系统模拟提供了基础。目前,他们已在模型中模拟出一只小白鼠完整大
脑中约2100万个神经元中的3.1万个模拟神经元。”可知,研究人员先建立了一个数字
化的老鼠大脑计算模型和虚拟老鼠身体模型,把两者结合起来之后模拟出了 3.1万个神经
元,并不是选项表述的用一只小白鼠脑中的3.1万个神经元建立了一个数字化的老鼠大脑
计算模型,偷换了概念。由此可以得出要点:C项错误,排除。〗
D.脑网络模型及其运动神经和运动控制是通过神经系统和仿生机器人相结合而建立的
〖通过选项关键词“脑网络模型”“运动神经”“运动控制”“神经系统”“仿生机器人”
可以定位到第6段。〗
段6:针对这项技术,瑞士洛桑理工学院于2015年开发了一个神经系统仿真工具。在该
仿真工具中,研究人员建立了一个数字化的老鼠大脑计算模型和虚拟老鼠身体模型,通过
把这两个模型结合起来,来模拟大脑和身体的互作用的神经机制,这为类脑机器人的神经
系统模拟提供了基础。目前,他们已在模型中模拟出一只小白鼠完整大脑中约 2100万个
神经元中的3.1万个模拟神经元。虽然,将神经系统和仿生机器人相结合进行研究,还只
是处在初步阶段,但已经建立的脑网络模型,以及运动神经和各种运动控制上的一系列研
究成果,已为类脑智能机器人的感知与控制回路的进一步研究奠定了很好的基础。
〖根据原文“将神经系统和仿生机器人相结合进行研究,还只是处在初步阶段,但已经建
立的脑网络模型,以及运动神经和各种运动控制上的一系列研究成果,已为类脑智能机器
人的感知与控制回路的进一步研究奠定了很好的基础”可知,脑网络模型的建立,以及运
动神经和各种运动控制与神经系统和仿生机器人并无关系,不需要通过与这二者结合才能
建立,由此可以得出要点:D项错误,排除。〗
第三步——按题目要求整理要点
【单项选择题:备选项中只有一个最符合题意,请用 2B铅笔在答题卡相应的题号后填涂
正确选项的序号。】
【答案】AB
问题五
A提取人的运动意向
B 采集大脑脑电图信号C 脑神经假体
D部分替代四肢功能
问题六
摘要:本文主题是类脑智能机器人。一、优势:能够以类似于人脑的工作方式运行,
提高认知、学习和动作控制能力,产生更深度的交互与合作。二、技术:利用材料类、机
械类和生物类仿肌肉驱动器建立仿生结构,简化结构,减轻重量,提升应用效果。脑科学
和神经科学发展让其以类脑的方式实现外界感知和自身控制,提高快速性和准确性。脑机
接口、神经假体等相关技术取得进展。三、研究重点:通过交互学习融合机器和人类优点,
根本上提高智能性,实现人机协作。解决类脑运动神经控制、多模态信息融合、交互式学
习控制和摄像头高速在线校准问题。
问题七
高锰酸盐指数。逐渐降低,由≤15mg/l左右降至≤2mg/l。
问题八
2019年8月5日至7日4个项目同步走低。2.2019年8月10日至11日、23日至24
日、28日至29日4个项目同步走高。
问题九
否。9日溶解氧、25日氨氮项目不在Ⅱ类质量标准范围。
问题十18天。2至8日保持7天Ⅱ类,9至13日恶化为Ⅳ类为主,14至24日优化为Ⅱ类,25
至31日恶化为Ⅲ类。
问题十一
怀疑与坚持——从引力波的发现谈起
一百年前,爱因斯坦提出引力波的概念,从被广泛质疑到最终被证实,成就了一次里
程碑式的重大探索。其实不止引力波,纵观科学史,几乎每一个重大的科学发现都从怀疑
开始,再到科学家坚持证实这种怀疑的真伪为终。可以说,以批判质疑为起点,并通过不
断的尝试、持续的坚持,才逐渐逼近真理,这是科学的魅力,也是科学发现的规律。因
此,科学发现需要怀疑与坚持的科学精神。
大胆怀疑,理性批判,是打开科学大门的“金钥匙”,为科学的探索打牢地基。“问号
是开启任何一门科学的钥匙”,巴甫洛夫道出了科学发展的真谛。纵观国内外科学发展史,
一些敢于挑战权威、打破传统的勇敢者推动了重大突破的取得。从哥白尼挑战托勒密提出
日心说,到伽利略质疑亚里士多德实施“比萨斜塔实验”;从袁隆平冲破“关于自花授粉水
稻杂交无优势”的经典理论,开发出杂交水稻造福全世界,到钟南山力排众议,认为非典
是冠状病毒,为当时救治病人立下了功劳······这无不在证明着科学发展需要怀疑的精神。
因此,科技日新月异的当下,要有批判地继承,才能开创更具包容性和创新性的新时代。
坚持不懈,矢志不渝,是攀登科学高峰的“指挥棒”,为科学的研究提供动力。爱因斯
坦曾说:“科学是永无止境的,它是一个永恒之谜。”所以,科学精神也体现在孜孜不倦、
锲而不舍、始终如一的过程中。科学家的坚持,是“人民英雄”陈薇院士拒绝百万年薪,毅
然投身抗病毒研究,与病毒“短兵相接”29年;是“中国核潜艇之父”黄旭华隐姓埋名几十年,
为我国核潜艇研制和跨越式发展作出卓越贡献;是“疟疾克星”屠呦呦60多年致力于中医
药研究实践,带领团队攻坚克难,解决了抗疟治疗失效难题。事实说明,唯有以怀疑的态
度方能推动进步,以恒久的毅力方能抵御艰险,成就每一项科学的重大发现。
习总书记曾强调,科学成就离不开精神支撑。科学的每一次重要进步,都让人类探索
未知的征途更加恢弘壮阔。秉持怀疑和坚持的精神,不断向科学发展的广度和深度进军,
我们就一定能取得更多科技创新突破,在人类文明的史册中镌刻下更璀璨的成就!
文章分析
怀疑与坚持——从引力波的发现谈起【标题的优点:首先,范文的标题“怀疑与坚持——从引力波的发现谈起”突出了“科
学发现”这一主题。其次,它在形式上采用了主副标题的形式,使标题更加完整、饱满,
富有逻辑性。】
一百年前,爱因斯坦提出引力波的概念,从被广泛质疑到最终被证实,成就了一次里
程碑式的重大探索。(1)其实不止引力波,纵观科学史,几乎每一个重大的科学发现都
从怀疑开始,再到科学家坚持证实这种怀疑的真伪为终。可以说,(2)以批判质疑为起
点,并通过不断的尝试、持续的坚持,才逐渐逼近真理,这是科学的魅力,也是科学发现
的规律。(3)因此,科学发现需要怀疑与坚持的科学精神。
【开头的优点:★内容方面。范文的开头是紧扣“科学发现”这一主题展开的。首先,
开头在段首处点出主题,做到了主题明确。其次,对“科学发现”这一主题进行了分析阐述,
指出了(1)科学发现的内涵;(2)科学发现的过程;(3)科学发现的总对策。★文字
表达方面:长短句配合使用,使语言表达有节奏感。】
大胆怀疑,理性批判,是打开科学大门的“金钥匙”,为科学的探索打牢地基。“问号
是开启任何一门科学的钥匙”,巴甫洛夫道出了科学发展的真谛。(1)纵观国内外科学发
展史,一些敢于挑战权威、打破传统的勇敢者推动了重大突破的取得。从哥白尼挑战托勒
密提出日心说,到伽利略质疑亚里士多德实施“比萨斜塔实验”;从袁隆平冲破“关于自花
授粉水稻杂交无优势”的经典理论,开发出杂交水稻造福全世界,到钟南山力排众议,认
为非典是冠状病毒,为当时救治病人立下了功劳……这无不在证明着科学发展需要怀疑的
精神。(2)因此,科技日新月异的当下,要有批判地继承,才能开创更具包容性和创新
性的新时代。
【论述段 1的优点:★观点句:范文的观点句是紧扣“科学发现”这一文章主题提出的。
形式上,它在段首处直接写出,位置突出,容易发现。内容上,关键词突出,内容要点明
确,可以明显看出它是从“批判和怀疑”入手,指出了“‘科学发现’的对策”。★论述内容:
(1)介绍了“科学发现”的对策——挑战权威、打破传统;(2)介绍了“科学发现”的对
策——批判地继承;以上两个方面的内容都是紧扣“大胆怀疑,理性批判,是打开科学大
门的‘金钥匙’,为科学的探索打牢地基”这个观点进行分析论述的,论述的针对性强,内
容层次丰富。最后,在论述方法上主要采取了讲道理和举例子相结合,做到了丰富多样。】
坚持不懈,矢志不渝,是攀登科学高峰的“指挥棒”,为科学的研究提供动力。爱因斯
坦曾说:“科学是永无止境的,它是一个永恒之谜。”(1)所以,科学精神也体现在孜孜
不倦、锲而不舍、始终如一的过程中。科学家的坚持,是“人民英雄”陈薇院士拒绝百万年
薪,毅然投身抗病毒研究,与病毒“短兵相接”29年;是“中国核潜艇之父”黄旭华隐姓埋名
几十年,为我国核潜艇研制和跨越式发展作出卓越贡献;是“疟疾克星”屠呦呦60多年致
力于中实医药研究实践,带领团队攻坚克难,解决了抗疟治疗失效难题。事说明,(2)
唯有以怀疑的态度方能推动进步,以恒久的毅力方能抵御艰险,成就每一项科学的重大发
现。【论述段 2的优点:★观点句:范文的观点句是紧扣“科学发现”这一文章主题提出的。
形式上,它在段首处直接写出,位置突出,容易发现。内容上,关键词突出,内容要点明
确,可以明显看出它是从“坚持不懈”这个角度入手,指出了“科学发现”的对策。★论述内
容:介绍了“科学发现”的过程——孜孜不倦、锲而不舍、始终如一;(2)介绍了“科学发
现”的对策——以恒久的毅力抵御艰险;以上两个方面的内容都是紧扣“坚持不懈,矢志不
渝,是攀登科学高峰的‘指挥棒’,为科学的研究提供动力”这个观点句进行分析论述的,
论述的针对性强,内容层次丰富。最后,在论述方法上主要采取了讲道理和举例子相结合,
做到了丰富多样。】
习总书记曾强调,科学成就离不开精神支撑。科学的每一次重要进步,都让人类探索未知
的征途更加恢弘壮阔。秉持怀疑和坚持的精神,不断向科学发展的广度和深度进军,我们
就一定能取得更多科技创新突破,在人类文明的史册中镌刻下更璀璨的成就!
【结尾的优点:范文的结尾回扣了“科学发现”这一主题。(1)再次阐述了“科学发现”
的总体要求。(2)再次提到“科学发现”的意义。】

