










文档内容
2.选择题+实验题组合练(2)1 2 3 4 5 6 7 8 9 10 11 12
一、单项选择题
. ( 广东惠州期末)关于光在竖直肥皂液薄膜上产生的干涉条纹,
1 2024·
下列说法正确的是( )
. 若明暗相间的条纹相互平行,说明薄膜厚度均匀
A
. 薄膜上的干涉条纹基本上是竖直的
B
. 用紫光照射薄膜产生的干涉条纹间距比用红光照射时大
C
√. 干涉条纹是光在薄膜前、后两个表面反射后叠加的结果
D1 2 3 4 5 6 7 8 9 10 11 12
解析: 若明暗相间的条纹间距相等,说明薄膜厚度均匀, 错误;
A
薄膜上的干涉条纹基本上是水平的, 错误;由薄膜干涉特征可知,照
B
射光的波长越长,经由同一薄膜产生的相邻干涉条纹间距越大,同种介
质中紫光的波长比红光的波长短,故用紫光照射薄膜产生的干涉条纹间
距比用红光照射时小, 错误;干涉条纹是光在薄膜前、后两个表面反
C
射后叠加的结果, 正确。
D1 2 3 4 5 6 7 8 9 10 11 12
. ( 四川内江期末)如图,健身球是一个充满气体的大皮球,当人
2 2024·
压向健身球上时,假设球内气体温度不变,则在这个过程中( )
. 气体分子的平均速率增大
A
. 外界对气体做功
√B
. 气体从外界吸收热量
C
. 气体的压强不变
D
解析: 气体温度不变,则气体分子的平均速率不变,故 错误;因
A
为气体的内能不变,体积减小,外界对气体做功,则气体要向外放出热
量,故 正确, 错误;根据公式 = 可知,温度不变,体积减小,则
B C C
气体的压强增大,故 错误。
D
1 2 3 4 5 6 7 8 9 10 11 12
. ( 浙江金华三模)热气球内的定位装置能把相同时间间隔内热气
3 2024·
球的位置变化记录下来,如图,记录的是在一定高度上正在竖直上升的
热气球每隔 秒热气球的高度变化,记录单位是米。下列同学对热气球
2
在记录时间内的运动判断正确的是( )
. 记录竖直上升的高度变化,热气球不能被视为质点
A
. 热气球正处在超重状态
B
. 我们可以用 = 2来计算出热气球的上升加速度
C Δx aT
√D . 记录时间内热气球的平均速度大小为 1 . 78 m/s1 2 3 4 5 6 7 8 9 10 11 12
解析: 记录竖直上升的高度变化,热气球能被视为质点,故 错
A
误;由图可知热气球在上升过程,相等的时间间隔的位移越来越小,说
明热气球在向上减速运动,处于失重状态,故 错误;由图可知热气球
B
在相邻的 内的位移差不是一恒量,说明热气球不是向上做匀减速直线
2 s
运动,所以不能用 = 来计算出热气球上升的加速度,故 错误;记
Δx aT2 C
录时间内热气球的平均速度大小为 = = = .
m/s 1 78
2 35+3 30+4 05+4 55
. . . .
,故 正确。
m/s D 4×21 2 3 4 5 6 7 8 9 10 11 12
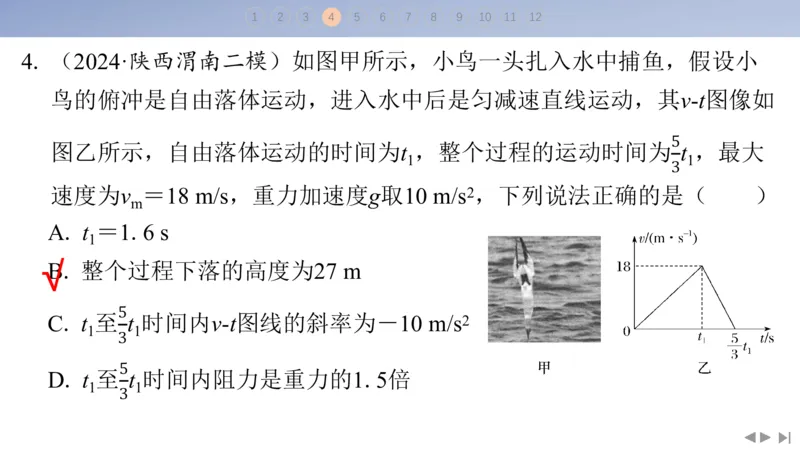
. ( 陕西渭南二模)如图甲所示,小鸟一头扎入水中捕鱼,假设小
4 2024·
鸟的俯冲是自由落体运动,进入水中后是匀减速直线运动,其 图像如
v-t
图乙所示,自由落体运动的时间为 ,整个过程的运动时间为 ,最大
t t
1 1
5
速度为 = ,重力加速度 取 ,下列说法正确的是( )
v 18 m/s g 10 m/s2
m 3
. = .
A t 1 6 s
1
√. 整个过程下落的高度为
B 27 m
. 至 时间内 图线的斜率为-
C t t v-t 10 m/s2
1 1
5
. 至3 时间内阻力是重力的 . 倍
D t t 1 5
1 1
5
31 2 3 4 5 6 7 8 9 10 11 12
解析: 小鸟做自由落体运动的最大速度为 = ,由自由落
v 18 m/s
m
体运动的规律有 = ,解得 = . ,故 错误;整个过程下落
v gt t 1 8 s A
m 1 1
的高度可由题图乙 图线与时间轴所围成的面积表示,则 =
v-t h
× = ,故 正确; 至 时间内小鸟的加速度为 =
t 27 m B t t a
1 1 1
m 5 5 0− m
5
2 3 3 1− 1
=- ,则此时间内 图线的斜率为 = =- ,3故 错
15 m/s2 v-t k a 15 m/s2 C
误; 至 时间内,由牛顿第二定律有 - = ,解得 =
t t f mg ma f
1 1
5
. ,即阻力是重力的 . 倍,故 错误。
2 5mg 2 5 D
31 2 3 4 5 6 7 8 9 10 11 12
. ( 浙江金华三模)如图,利用平面镜也可以实现杨氏双缝干涉实
5 2024·
验的结果,下列说法正确的是( )
. 光屏上的条纹与镜面垂直
A
+
. 相邻亮条纹的间距为 =
B Δx λ
. 若将平面镜向右移动一些,相邻亮条纹间距不变
C
√
. 若将平面镜向右移动一些,亮条纹数量保持不变
D1 2 3 4 5 6 7 8 9 10 11 12
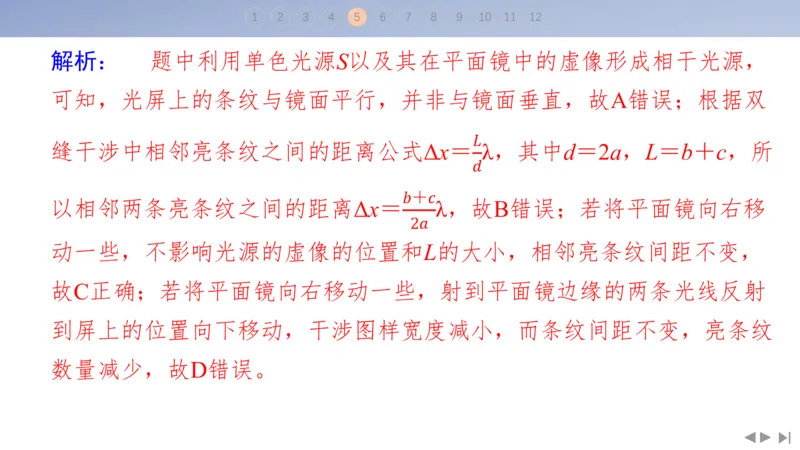
解析: 题中利用单色光源 以及其在平面镜中的虚像形成相干光源,
S
可知,光屏上的条纹与镜面平行,并非与镜面垂直,故 错误;根据双
A
缝干涉中相邻亮条纹之间的距离公式 = ,其中 = , = + ,所
Δx λ d 2a L b c
+
以相邻两条亮条纹之间的距离 = ,故 错误;若将平面镜向右移
Δx λ B
动一些,不影响光源的虚像的位置和 的大小,相邻亮条纹间距不变,
L
2
故 正确;若将平面镜向右移动一些,射到平面镜边缘的两条光线反射
C
到屏上的位置向下移动,干涉图样宽度减小,而条纹间距不变,亮条纹
数量减少,故 错误。
D1 2 3 4 5 6 7 8 9 10 11 12
. ( 四川内江期末)当上、下抖动长长的轻绳时,轻绳则呈正弦波
6 2024·
形状。图甲是某轻绳产生的横波在介质中沿 轴传播,在 = . 时的
x t 0 25 s
波形图,图乙为横坐标在 . 处 点的振动图像,则下列说法中正确的
1 5 m P
是( )
. 该波向左传播,波速为
A 2 m/s
. 再经过 . 质点 通过的路程
B 3 5 s P
为
140 cm
√. 质点比 质点先到达波峰
C L N
. 若人加快抖动轻绳,两个相邻波峰之间的距离不变
D1 2 3 4 5 6 7 8 9 10 11 12
解析: 由图乙可知,在 = . 时,质点 向上振动,根据“同侧
t 0 25 s P
法”可知,该波向右传播;由图甲可知,波的波长为 = ,由图乙可
λ 4 m
知,波的周期为 = ,所以波速为 = = ,故 错误;再经过 .
T 2 s v 2 m/s A 3 5
,则前 , = = ,质点 通过的路程为 = × = ,后
s 3 s Δt 3 s T P s 4A 120 cm
1 1
3 3
. , = . = ,由于质点 从位移为负向最大位移振动,则通过
0 5 s Δt 0 5 s T P
2 2
2
1
的路程 < = ,所以,再经过 . 质点 通过的路程 = + <
s A 20 cm 3 5 s P s s s
2 1 2
4
,故 错误;根据“同侧法”可知, 质点向 轴正方向运动,
140 cm B L y N
质点向 轴负方向运动,则 质点比 质点先到达波峰,故 正确;
y L N C
若人加快抖动轻绳,则波的振动频率变大,波速不变,根据 = 可知,波
λ
长变小,即两个相邻波峰之间的距离变小,故 错误。
D
1 2 3 4 5 6 7 8 9 10 11 12
. ( 陕西渭南二模)华为 实现了手机卫星通信,只要有卫星
7 2024· mate 60
信号覆盖的地方,就可以实现通话。如图所示,三颗赤道上空的通信卫
星就能实现环赤道全球通信,已知三颗卫星离地高度均为 ,地球的半
h
径为 ,地球表面重力加速度为 ,引力常量为 。下列说法正确的是
R g G
( )
. 三颗卫星的运行速度大于 .
A 7 9 km/s
. 三颗通信卫星受到地球的万有引力的大小一定相等
B
√. 其中一颗质量为 的通信卫星的动能为
C m
+
2
. 能实现赤道全球通信时,卫星离地高度至少为
D 2R
2 ℎ1 2 3 4 5 6 7 8 9 10 11 12
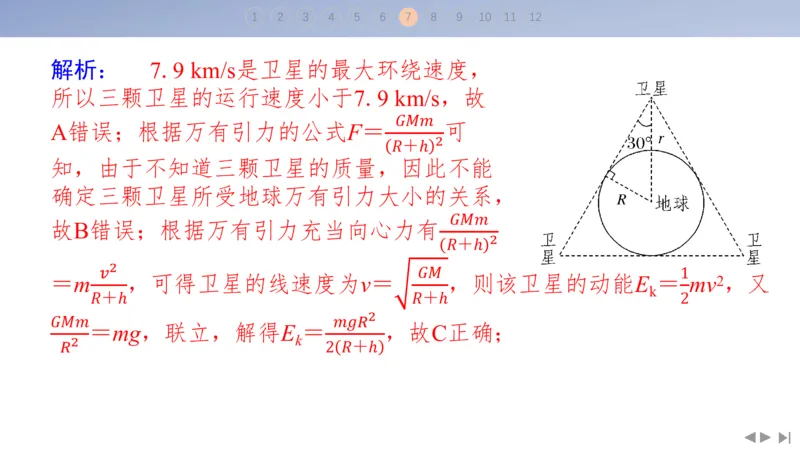
解析: . 是卫星的最大环绕速度,
7 9 km/s
所以三颗卫星的运行速度小于 . ,故
7 9 km/s
错误;根据万有引力的公式 = 可
A F
+
知,由于不知道三颗卫星的质量,因此不能
2
ℎ
确定三颗卫星所受地球万有引力大小的关系,
故 错误;根据万有引力充当向心力有
B
+
2
= m ,可得卫星的线速度为 v = ,则ℎ 该卫星的动能 E = mv2 ,又
k
+ +
2
1
= ,联立,解得 = ,故 正确;
mg E C
ℎ ℎ 2
k
+
2
2
2 ℎ1 2 3 4 5 6 7 8 9 10 11 12
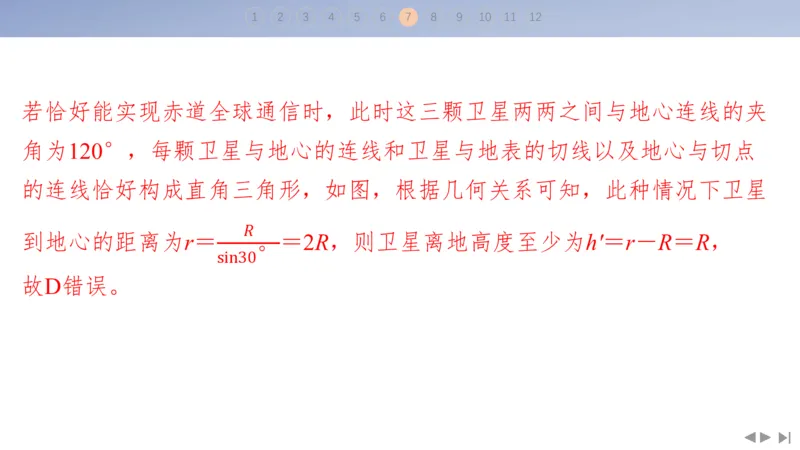
若恰好能实现赤道全球通信时,此时这三颗卫星两两之间与地心连线的夹
角为 °,每颗卫星与地心的连线和卫星与地表的切线以及地心与切点
120
的连线恰好构成直角三角形,如图,根据几何关系可知,此种情况下卫星
到地心的距离为 = = ,则卫星离地高度至少为 = - = ,
r 2R h' r R R
°
故 错误。
D
sin301 2 3 4 5 6 7 8 9 10 11 12
二、多项选择题
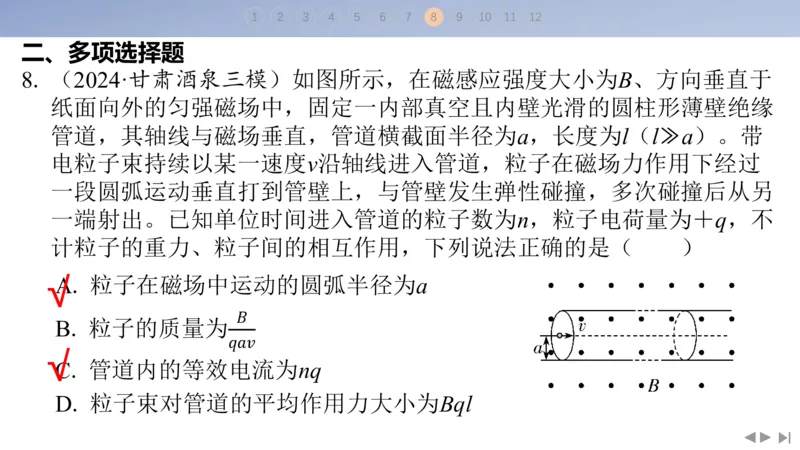
. ( 甘肃酒泉三模)如图所示,在磁感应强度大小为 、方向垂直于
8 2024· B
纸面向外的匀强磁场中,固定一内部真空且内壁光滑的圆柱形薄壁绝缘
管道,其轴线与磁场垂直,管道横截面半径为 ,长度为 ( ≫ )。带
a l l a
电粒子束持续以某一速度 沿轴线进入管道,粒子在磁场力作用下经过
v
一段圆弧运动垂直打到管壁上,与管壁发生弹性碰撞,多次碰撞后从另
一端射出。已知单位时间进入管道的粒子数为 ,粒子电荷量为+ ,不
n q
计粒子的重力、粒子间的相互作用,下列说法正确的是( )
. 粒子在磁场中运动的圆弧半径为
√A a
. 粒子的质量为
B
√
. 管道内的等效电流为
C nq
. 粒子束对管道的平均作用力大小为
D Bql1 2 3 4 5 6 7 8 9 10 11 12
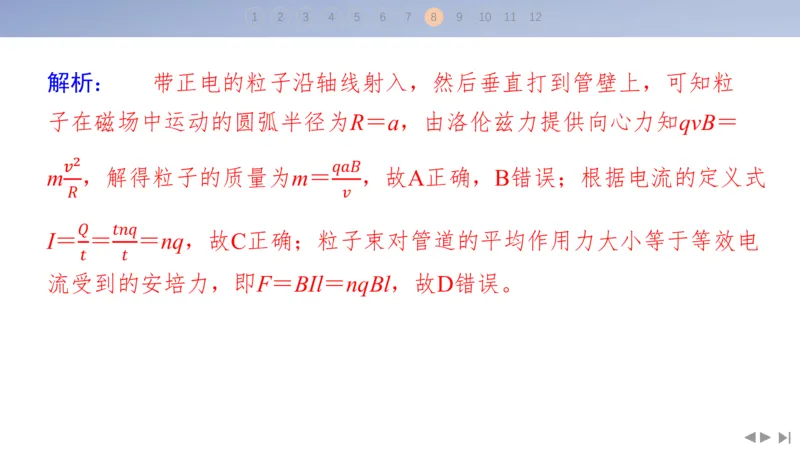
解析: 带正电的粒子沿轴线射入,然后垂直打到管壁上,可知粒
子在磁场中运动的圆弧半径为 = ,由洛伦兹力提供向心力知 =
R a qvB
,解得粒子的质量为 = ,故 正确, 错误;根据电流的定义式
m m A B
2
= = = ,故 正确;粒子束对管道的平均作用力大小等于等效电
I nq C
流受到的安培力,即 = = ,故 错误。
F BIl nqBl D
1 2 3 4 5 6 7 8 9 10 11 12
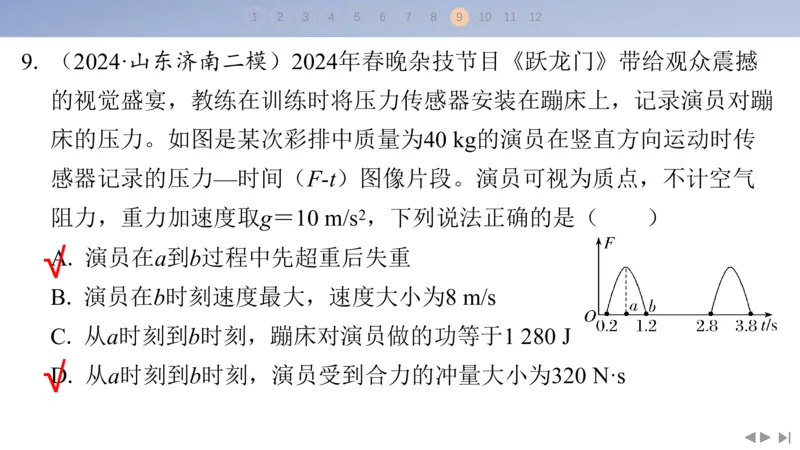
. ( 山东济南二模) 年春晚杂技节目《跃龙门》带给观众震撼
9 2024· 2024
的视觉盛宴,教练在训练时将压力传感器安装在蹦床上,记录演员对蹦
床的压力。如图是某次彩排中质量为 的演员在竖直方向运动时传
40 kg
感器记录的压力 时间( )图像片段。演员可视为质点,不计空气
— F-t
阻力,重力加速度取 = ,下列说法正确的是( )
g 10 m/s2
√. 演员在 到 过程中先超重后失重
A a b
. 演员在 时刻速度最大,速度大小为
B b 8 m/s
. 从 时刻到 时刻,蹦床对演员做的功等于
C a b 1 280 J
√. 从 时刻到 时刻,演员受到合力的冲量大小为
D a b 320 N·s1 2 3 4 5 6 7 8 9 10 11 12
解析: 演员在 到 过程,压力由最大值减小为 ,根据牛顿第三定律可知,
a b 0
演员所受支持力由最大值减小为 ,支持力先大于重力后小于重力,根据牛顿
0
第二定律可知,加速度方向先向上后向下,则演员在 到 过程先处于超重状
a b
态,后处于失重状态,故 正确;根据图像可知,演员脱离蹦床在空中运动的
A
时间为 = . - . = . ,根据竖直上抛运动的对称性可知,演员脱离蹦
t 2 8 s 1 2 s 1 6 s
床向上运动的时间为 . ,利用逆向思维,根据速度公式有 = = ,
0 8 s v g· 8 m/s
b
演员在 到 过程,先向上做加速度减小的变加速直线运动,当加速度为 时,
a b 0
2
速度达到最大值,后向上做加速度增大的变减速直线运动,即 到 之间的某
a b
一时刻,演员的速度最大,最大速度大于 ,故 错误;从 时刻到 时刻,
8 m/s B a b
根据动能定理 - = = × × = ,可知从 时刻到 时
W W m 40 82 J 1 280 J a b
蹦床 G
1 1
刻,蹦床的弹性势能转化为演员的重力势能与动能,故从 时刻到 时刻,蹦
2 a b
2 2
床对演员做的功大于 ,故 错误;从 时刻到 时刻,根据动量定理有
1 280 J C a b I
合
= = - = ,故 正确。
Δp mv 0 320 N·s D
b1 2 3 4 5 6 7 8 9 10 11 12
. ( 黑龙江三模)如图所示,质量 = ,长 = 、电阻 =
10 2024· m kg L 1 m R
ab
π
的水平导体棒 ,其两个端点分别搭接在竖直平行正对放置的两光
1 Ω ab
10
滑金属圆环上,两圆环半径均为 = ,电阻不计。阻值为 = 的
r m R 1 Ω
2
定值电阻用导线与圆环相连接,整个装置处在方向竖直向下、磁感应
π
强度大小为 = 的匀强磁场中。导体棒 在外力 作用下以速率 =
B T ab F v
绕两圆环的中心轴 匀速转动, 在圆环最低点时记为 = 时
2 m/s OO' ab t 0
刻,重力加速度 2取 ,电流表为理想交流表,其他电阻不计。下
g 10 m/s2
列说法正确的是( )
√. 电流表的示数为
A 1 A
. 定值电阻两端的电压为 =
B u 2 cos πt
R
. 从 = 到 . 的过程中,通过导体棒 的电
C t 0 0 5 s ab
荷量为 . 2 V
0 5 C
√
. 从 = 到 . 的过程中,外力 做的功为
D t 0 0 5 s F 3 J1 2 3 4 5 6 7 8 9 10 11 12
解析 导体棒 在圆环最低点时,速度 与磁感线垂直,有效切
ab v
割速度最大,经过时间 导体棒速度与磁感线夹角为 = = = ,导
t θ ωt t πt
体棒的有效切割速度为 = = ,则感应电动势随时
v' vcos θ 2cos πt
间的变化规律为 = = ,电动势最大值为 =
u E cos θ 2 cos πt E 2
m m
m/s
,感应电流最大值为 = = ,电流表示数为电流有效值,
V I A
m
+
2 V 2
m
故电流表示数为 = = , 正确;定值电阻两端的电压为 =
I 1 A A u
2 R
m
= , 错误;导体棒 做圆周运动的周期为 = =
u cos πt B ab T 2
2
+
2π
,因为 . = ,所以在 ~ . 间内,通过导体棒 的电荷量为 =
s
0 5
2
s
V
0 0 5 s ab
q
= = , 错误;从 = 到 . 的过程中,根据能量守恒定
C C t 0 0 5 s
4
+ +
Δ 2
律,有外力 做的功为 = + + = , 正确。
F W I2 t mgr 3 J D
π
1 2 3 4 5 6 7 8 9 10 11 12
三、实验题
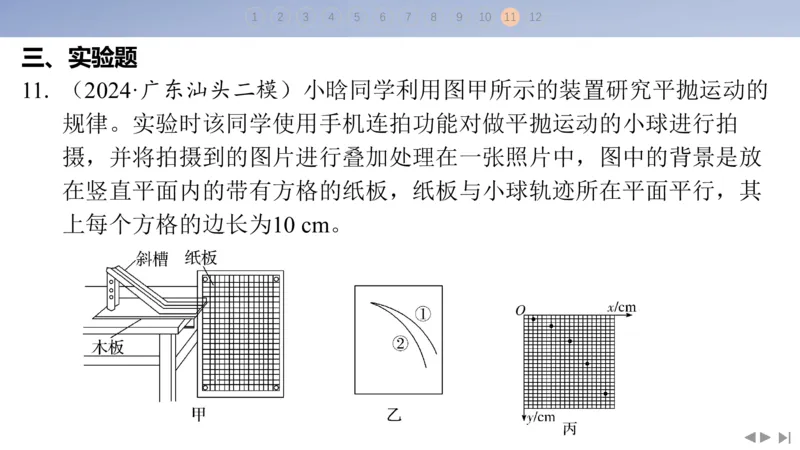
. ( 广东汕头二模)小晗同学利用图甲所示的装置研究平抛运动的
11 2024·
规律。实验时该同学使用手机连拍功能对做平抛运动的小球进行拍
摄,并将拍摄到的图片进行叠加处理在一张照片中,图中的背景是放
在竖直平面内的带有方格的纸板,纸板与小球轨迹所在平面平行,其
上每个方格的边长为 。
10 cm1 2 3 4 5 6 7 8 9 10 11 12
( )下列说法正确的是 。
1 BC
. 实验所用斜槽应尽量光滑
A
. 斜槽末端必须保持水平
B
. 实验所用斜槽不需要尽量光滑
C
解析: 实验所用斜槽不需要尽量光滑, 错误, 正确;斜槽末端
A C
必须保持水平,确保小球离开斜槽后做平抛运动, 正确。
B1 2 3 4 5 6 7 8 9 10 11 12
( )图乙是实验中小球从斜槽上不同位置由静止释放获得的两条轨
2
迹,图线①所对应的小球在斜槽上释放的位置 较高 (选填
“较低”或“较高”)。
解析: 由图乙可知两次小球做平抛运动下落相同高度时,
图线①水平位移更大,故图线①所对应的小球初速度较大,在斜
槽上由静止释放的位置较高。1 2 3 4 5 6 7 8 9 10 11 12
( )某次拍摄后得到的照片如图丙所示,小球做平抛运动的初速度大
3
小 = . (结果保留两位有效数字,重力加速度取 =
v 2 8 m/s g
0
)。
10 m/s2
解析: 由图丙可得,小球在竖直方向相邻位移之差 =
Δy
× = . ,根据匀变速直线运动特点可得 = =
2 10 cm 0 2 m T
Δ 2
10
,由水平位移 = ,可得 = = =
s Δx v T v m/s 2
0 0
−2
Δ 4×10×10
≈ . 。
m/s 2 8 m/s
0 1 2 2
.1 2 3 4 5 6 7 8 9 10 11 12
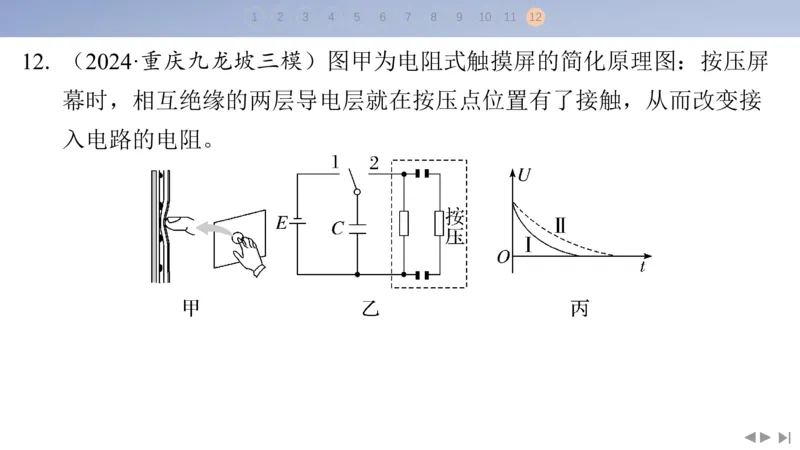
. ( 重庆九龙坡三模)图甲为电阻式触摸屏的简化原理图:按压屏
12 2024·
幕时,相互绝缘的两层导电层就在按压点位置有了接触,从而改变接
入电路的电阻。1 2 3 4 5 6 7 8 9 10 11 12
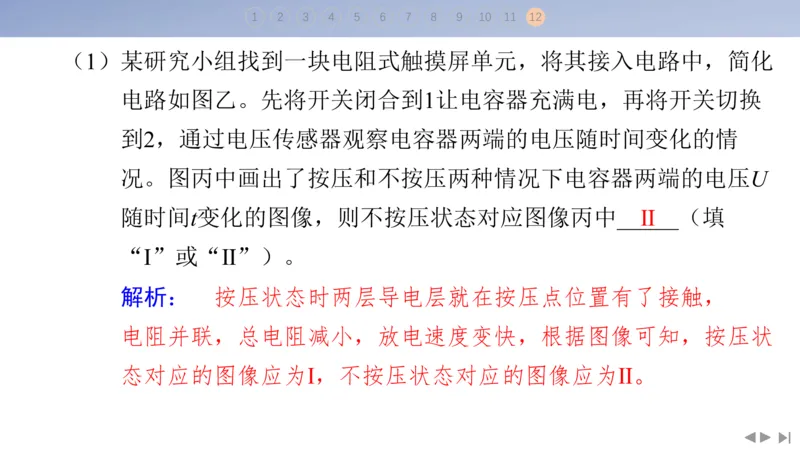
( )某研究小组找到一块电阻式触摸屏单元,将其接入电路中,简化
1
电路如图乙。先将开关闭合到 让电容器充满电,再将开关切换
1
到 ,通过电压传感器观察电容器两端的电压随时间变化的情
2
况。图丙中画出了按压和不按压两种情况下电容器两端的电压
U
随时间 变化的图像,则不按压状态对应图像丙中 (填
t Ⅱ
“ ”或“ ”)。
Ⅰ Ⅱ
解析: 按压状态时两层导电层就在按压点位置有了接触,
电阻并联,总电阻减小,放电速度变快,根据图像可知,按压状
态对应的图像应为 ,不按压状态对应的图像应为 。
Ⅰ Ⅱ1 2 3 4 5 6 7 8 9 10 11 12
( )粗测该触摸屏单元未按压状态下的电阻约为几十欧姆。某同学想
2
较准确测量此电阻,可供使用的器材有:
. 电源 (电动势为 ,内阻约为 );
A E 3 V 1 Ω
. 电压表 (量程为 ,内阻约为 );
B V 15 V 10 kΩ
. 电流表 (量程为 ,内阻为 );
C A 3 mA 5 Ω
1
. 电流表 (量程为 ,内阻约为 );
D A 60 mA 2 Ω
2
. 滑动变阻器 (总阻值约为 );
E R 10 Ω
1
. 电阻箱 ,最大阻值为 ;
F R 99 999 Ω
2
. 开关 ,导线若干。
G S1 2 3 4 5 6 7 8 9 10 11 12
①该同学将电流表 和电阻箱 串联改装成量程为 . 的电压
A R 4 5 V
1 2
表,电阻箱 的阻值应调为 。
R 1 495 Ω
2
②该同学设计了图丁测量电路,为了尽量减小实验的
a
系统误差,电阻箱右边的导线应该接 (填“ ”
a
或“ ”);按正确选择连接好电路之后,改变滑动
b
变阻器滑片位置,测得多组对应的电流表 和电流表
A
1
的示数 、 ,得到了如图戊所示的图像,由图中数
A I I
2 1 2
据可得该触摸屏单元未按压状态下的阻值为
79 Ω
(结果保留 位有效数字);该测量方法中电流表
2 A
2
没有
的内阻对测量结果 (填“有”或“没有”)
影响。1 2 3 4 5 6 7 8 9 10 11 12
解析: ①根据 = +
R R
A1 2
解得电阻箱 = 。
R 1 495 Ω
g1
2
②由于已知电流表 的阻值,可以计算出待测电阻两端的电压,
A
1
再用差值法计算流过待测电阻的电流,故应接 。
a
+
根据 =
R
x
1 A1 2
可得 =
I 2− 1 I
1 2
+ +
结合图像,可得 = =
A1 2 k
+ +
2 5
.
A1 2 50
解得 ≈
R 79 Ω
x
由分析可知该测量方法中电流表 的内阻对测量结果没有影响。
A
2

