文档内容
机械能 训练题
一、选择题
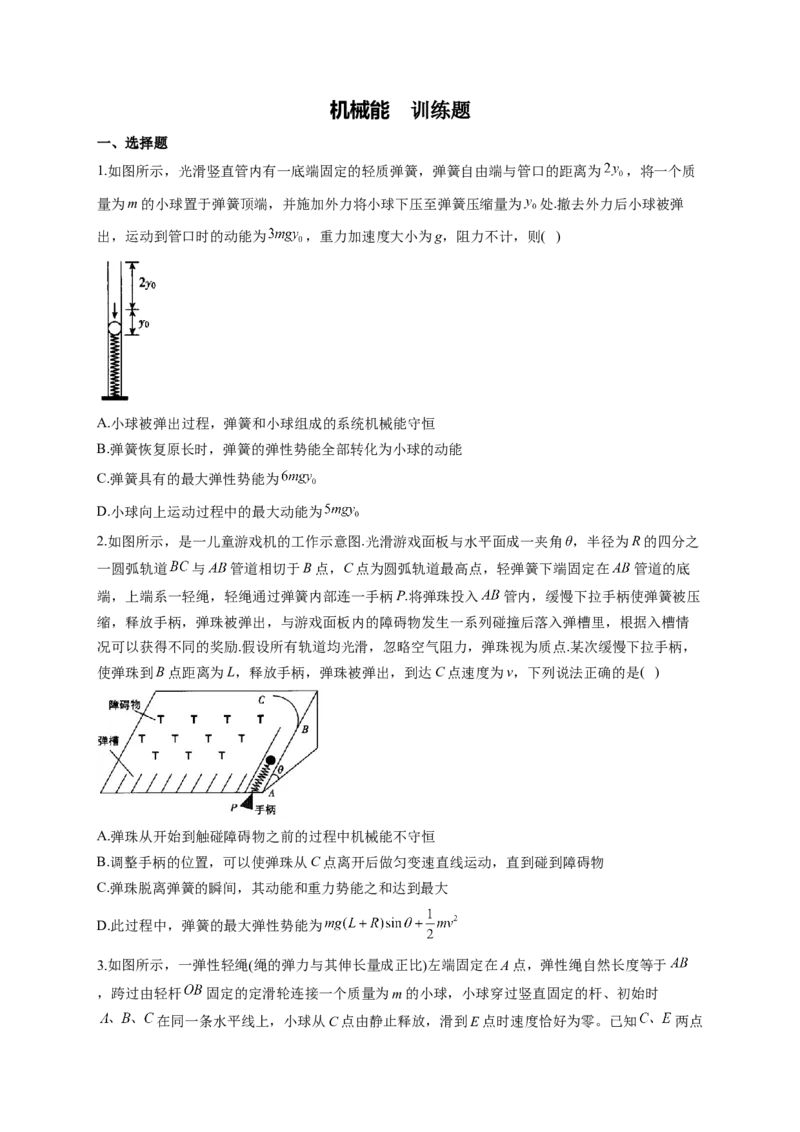
1.如图所示,光滑竖直管内有一底端固定的轻质弹簧,弹簧自由端与管口的距离为 ,将一个质
量为m的小球置于弹簧顶端,并施加外力将小球下压至弹簧压缩量为 处.撤去外力后小球被弹
出,运动到管口时的动能为 ,重力加速度大小为g,阻力不计,则( )
A.小球被弹出过程,弹簧和小球组成的系统机械能守恒
B.弹簧恢复原长时,弹簧的弹性势能全部转化为小球的动能
C.弹簧具有的最大弹性势能为
D.小球向上运动过程中的最大动能为
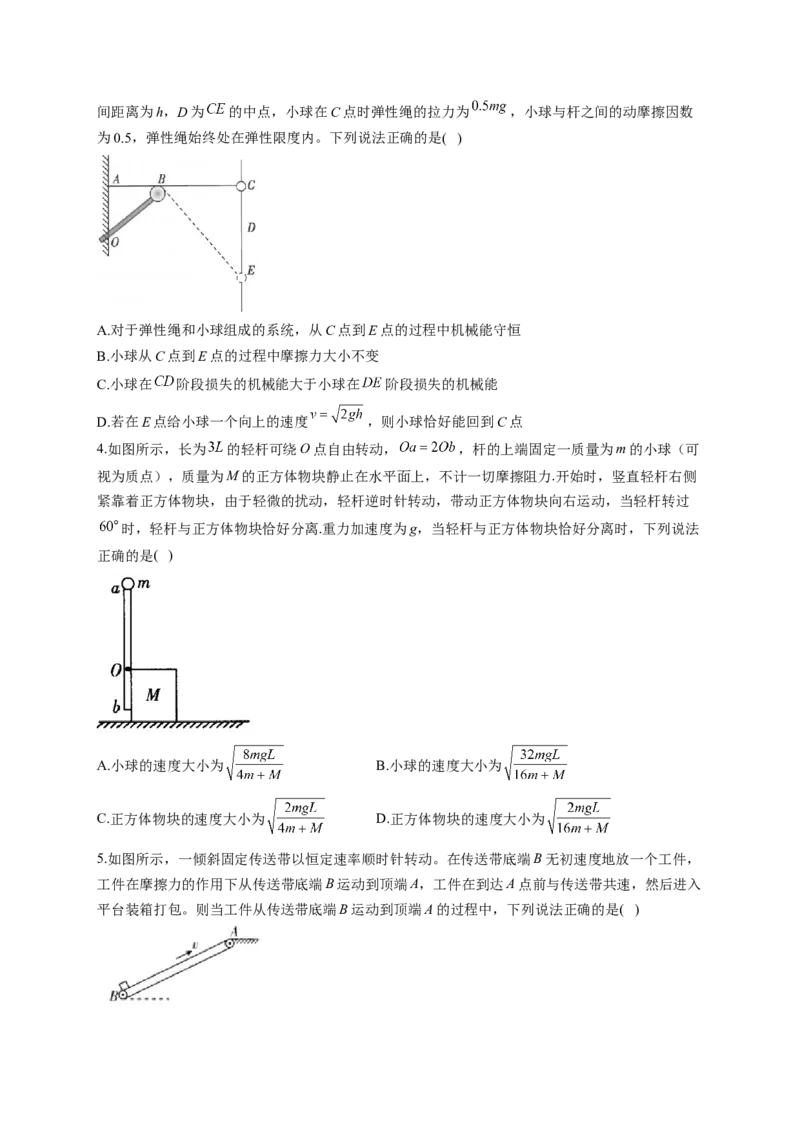
2.如图所示,是一儿童游戏机的工作示意图.光滑游戏面板与水平面成一夹角θ,半径为R的四分之
一圆弧轨道 与 管道相切于B点,C点为圆弧轨道最高点,轻弹簧下端固定在 管道的底
端,上端系一轻绳,轻绳通过弹簧内部连一手柄P.将弹珠投入 管内,缓慢下拉手柄使弹簧被压
缩,释放手柄,弹珠被弹出,与游戏面板内的障碍物发生一系列碰撞后落入弹槽里,根据入槽情
况可以获得不同的奖励.假设所有轨道均光滑,忽略空气阻力,弹珠视为质点.某次缓慢下拉手柄,
使弹珠到B点距离为L,释放手柄,弹珠被弹出,到达C点速度为v,下列说法正确的是( )
A.弹珠从开始到触碰障碍物之前的过程中机械能不守恒
B.调整手柄的位置,可以使弹珠从C点离开后做匀变速直线运动,直到碰到障碍物
C.弹珠脱离弹簧的瞬间,其动能和重力势能之和达到最大
D.此过程中,弹簧的最大弹性势能为
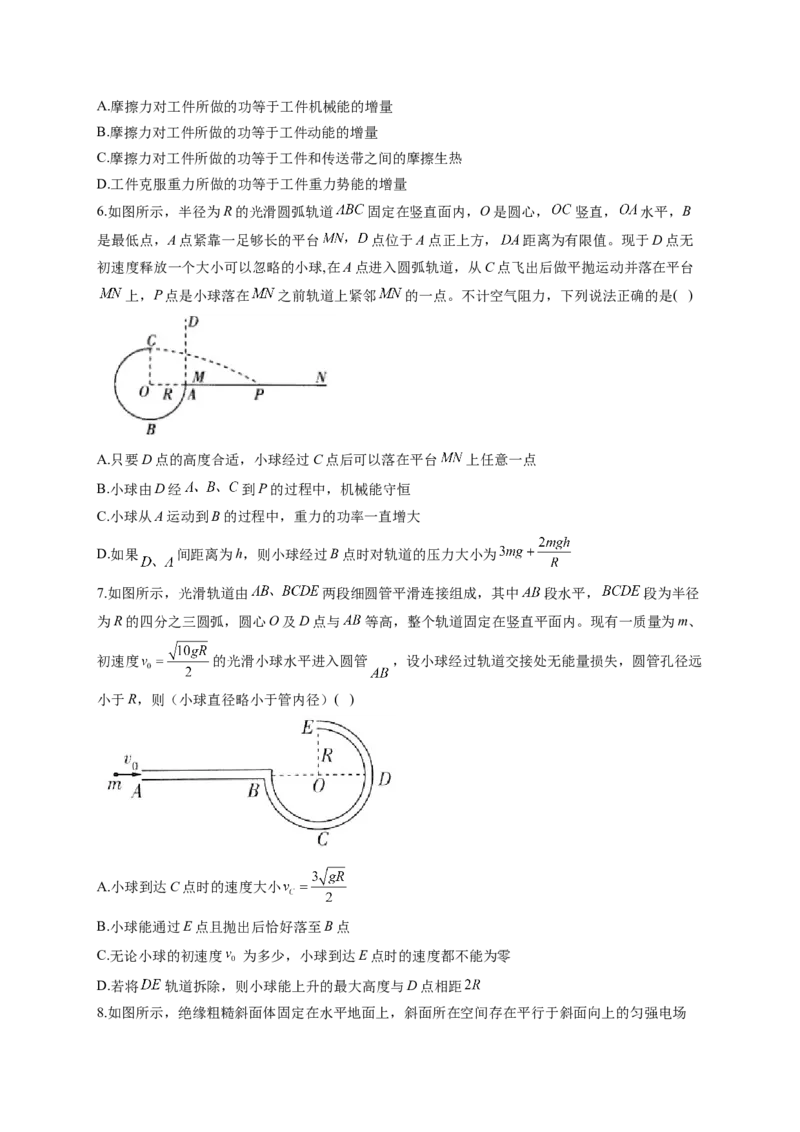
3.如图所示,一弹性轻绳(绳的弹力与其伸长量成正比)左端固定在A点,弹性绳自然长度等于
,跨过由轻杆 固定的定滑轮连接一个质量为m的小球,小球穿过竖直固定的杆、初始时
在同一条水平线上,小球从C点由静止释放,滑到E点时速度恰好为零。已知 两点间距离为h,D为 的中点,小球在C点时弹性绳的拉力为 ,小球与杆之间的动摩擦因数
为0.5,弹性绳始终处在弹性限度内。下列说法正确的是( )
A.对于弹性绳和小球组成的系统,从C点到E点的过程中机械能守恒
B.小球从C点到E点的过程中摩擦力大小不变
C.小球在 阶段损失的机械能大于小球在 阶段损失的机械能
D.若在E点给小球一个向上的速度 ,则小球恰好能回到C点
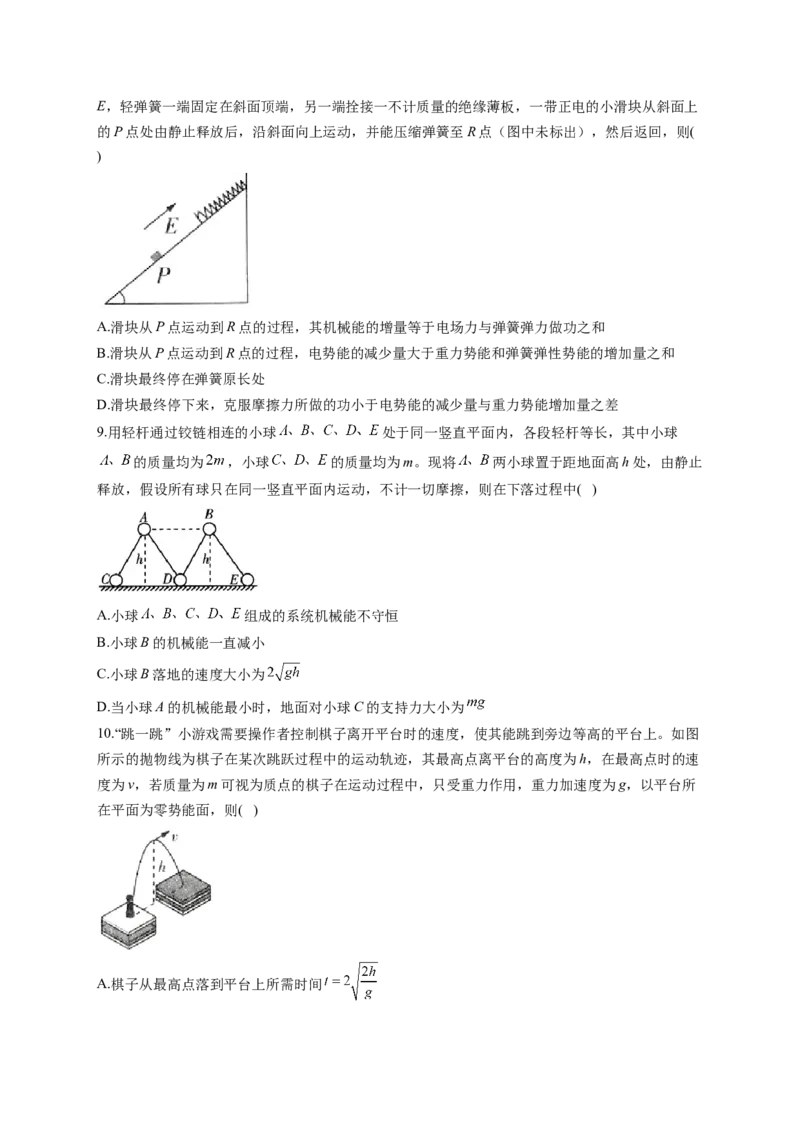
4.如图所示,长为 的轻杆可绕O点自由转动, ,杆的上端固定一质量为m的小球(可
视为质点),质量为M的正方体物块静止在水平面上,不计一切摩擦阻力.开始时,竖直轻杆右侧
紧靠着正方体物块,由于轻微的扰动,轻杆逆时针转动,带动正方体物块向右运动,当轻杆转过
时,轻杆与正方体物块恰好分离.重力加速度为g,当轻杆与正方体物块恰好分离时,下列说法
正确的是( )
A.小球的速度大小为 B.小球的速度大小为
C.正方体物块的速度大小为 D.正方体物块的速度大小为
5.如图所示,一倾斜固定传送带以恒定速率顺时针转动。在传送带底端B无初速度地放一个工件,
工件在摩擦力的作用下从传送带底端B运动到顶端A,工件在到达A点前与传送带共速,然后进入
平台装箱打包。则当工件从传送带底端B运动到顶端A的过程中,下列说法正确的是( )A.摩擦力对工件所做的功等于工件机械能的增量
B.摩擦力对工件所做的功等于工件动能的增量
C.摩擦力对工件所做的功等于工件和传送带之间的摩擦生热
D.工件克服重力所做的功等于工件重力势能的增量
6.如图所示,半径为R的光滑圆弧轨道 固定在竖直面内,O是圆心, 竖直, 水平,B
是最低点,A点紧靠一足够长的平台 点位于A点正上方, 距离为有限值。现于D点无
初速度释放一个大小可以忽略的小球,在A点进入圆弧轨道,从C点飞出后做平抛运动并落在平台
上,P点是小球落在 之前轨道上紧邻 的一点。不计空气阻力,下列说法正确的是( )
A.只要D点的高度合适,小球经过C点后可以落在平台 上任意一点
B.小球由D经 到P的过程中,机械能守恒
C.小球从A运动到B的过程中,重力的功率一直增大
D.如果 间距离为h,则小球经过B点时对轨道的压力大小为
7.如图所示,光滑轨道由 两段细圆管平滑连接组成,其中 段水平, 段为半径
为R的四分之三圆弧,圆心O及D点与 等高,整个轨道固定在竖直平面内。现有一质量为m、
初速度 的光滑小球水平进入圆管 ,设小球经过轨道交接处无能量损失,圆管孔径远
小于R,则(小球直径略小于管内径)( )
A.小球到达C点时的速度大小
B.小球能通过E点且抛出后恰好落至B点
C.无论小球的初速度 为多少,小球到达E点时的速度都不能为零
D.若将 轨道拆除,则小球能上升的最大高度与D点相距
8.如图所示,绝缘粗糙斜面体固定在水平地面上,斜面所在空间存在平行于斜面向上的匀强电场E,轻弹簧一端固定在斜面顶端,另一端拴接一不计质量的绝缘薄板,一带正电的小滑块从斜面上
的P点处由静止释放后,沿斜面向上运动,并能压缩弹簧至R点(图中未标出),然后返回,则(
)
A.滑块从P点运动到R点的过程,其机械能的增量等于电场力与弹簧弹力做功之和
B.滑块从P点运动到R点的过程,电势能的减少量大于重力势能和弹簧弹性势能的增加量之和
C.滑块最终停在弹簧原长处
D.滑块最终停下来,克服摩擦力所做的功小于电势能的减少量与重力势能增加量之差
9.用轻杆通过铰链相连的小球 处于同一竖直平面内,各段轻杆等长,其中小球
的质量均为 ,小球 的质量均为m。现将 两小球置于距地面高h处,由静止
释放,假设所有球只在同一竖直平面内运动,不计一切摩擦,则在下落过程中( )
A.小球 组成的系统机械能不守恒
B.小球B的机械能一直减小
C.小球B落地的速度大小为
D.当小球A的机械能最小时,地面对小球C的支持力大小为
10.“跳一跳”小游戏需要操作者控制棋子离开平台时的速度,使其能跳到旁边等高的平台上。如图
所示的抛物线为棋子在某次跳跃过程中的运动轨迹,其最高点离平台的高度为h,在最高点时的速
度为v,若质量为m可视为质点的棋子在运动过程中,只受重力作用,重力加速度为g,以平台所
在平面为零势能面,则( )
A.棋子从最高点落到平台上所需时间B.棋子在两平台上落点间的距离
C.棋子落到后一个平台上时的机械能
D.棋子落到后一个平台上时的动能
二、综合题
11.某探究小组验证机械能守恒定律的装置如图甲所示,细线一端拴一个球,另一端连接拉力传感
器,固定在天花板上,传感器可记录球在摆动过程中细线拉力大小,用量角器量出释放球时细线
与竖直方向的夹角,用天平测出球的质量为m。重力加速度为g。
(1)用游标卡尺测出小球直径如图乙所示,读数为_________mm。
(2)将球拉至图甲所示位置,细线与竖直方向夹角为θ,静止释放球,发现细线拉力在球摆动过
程中呈周期性变化。为求出球在最低点的速度大小,应读取拉力的_________(选填“最大值”或
“最小值”),其值为F。
(3)球从静止释放运动到最低点过程中,满足机械能守恒的关系式为__________(用测定物理量
的符号表示)。
(4)关于该实验,下列说法中正确的有__________。
A.细线要选择伸缩性小的
B.球尽量选择密度大的
C.不必测出球的质量和细线的长度
D.可以直接用弹簧测力计代替拉力传感器进行实验
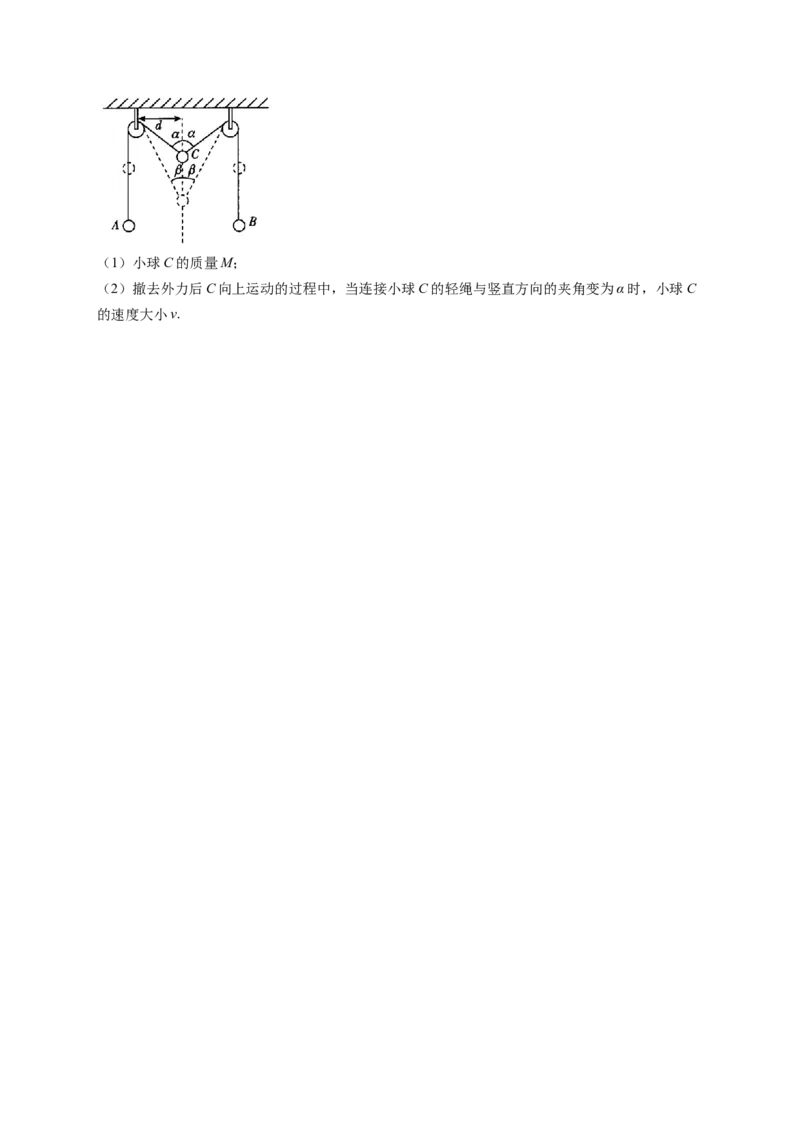
12.如图所示, 三个小球(均可视为质点)用轻绳(足够长)通过轻小滑轮对称连接,
的质量均为m,当连接小球C的轻绳与竖直方向的夹角为 时,整个装置处于静止状
态.现在外力作用下将小球C竖直向下缓慢拉动至虚线位置,此时连接小球C的轻绳与竖直方向的
夹角为 ,然后撤去外力,不计一切阻力,整个装置处于竖直面内,左右滑轮到竖直中线的
距离为 ,取 .求:(1)小球C的质量M;
(2)撤去外力后C向上运动的过程中,当连接小球C的轻绳与竖直方向的夹角变为α时,小球C
的速度大小v.答案
1.答案:AC
解析:小球被弹出过程,只有重力和弹簧的弹力做功,所以弹簧和小球组成的系统机械能守恒,A
正确;弹簧恢复原长时,弹簧的弹性势能转化为小球的动能和重力势能,B错误;从撤去外力到小
球运动到管口的过程中,由机械能守恒定律得弹簧具有的最大弹性势能为
,C正确;当小球所受合力为零时,即小球的重力与弹簧的弹力相等
时,小球的动能最大,为 ,由机械能守恒定律知, ,解得小球向上运动过程
中的最大动能 ,D错误.
2.答案:ACD
解析:因为弹珠释放过程中,弹簧对弹珠做功,弹珠的机械能不守恒,故A正确;弹珠从C点离
开后速度方向水平向左,合力为重力沿斜面向下的分力,两者垂直,所以弹珠做匀变速曲线运
动,直到碰到障碍物,故B错误;释放手柄后,弹簧的弹力对弹珠做正功,弹珠的动能和重力势
能之和不断增大,根据弹珠和弹簧组成的系统机械能守恒知,弹珠脱离弹簧的瞬间,弹簧的弹性
势能全部转化为弹珠的动能和重力势能,所以此瞬间弹珠的动能和重力势能之和达到最大,故C
正确;根据系统的机械能守恒定律得,弹簧的最大弹性势能等于弹珠在C点与在初始位置的机械
能之差,为 ,故D正确.
3.答案:B
解析:本题考查功能关系、动能定理。由于杆对小球的滑动摩擦力做负功,对于弹性绳和小球组
成的系统,从C点到E点的过程中机械能减少,A错误;设 间距为x,在C点时,绳上的拉
力为 ,从C点向下运动过程,设B点右侧绳长为 ,与竖直方向夹角为θ,由平衡
条件得 ,小球受到的滑动摩擦力大小为 ,故小球从C点到
E点的过程中摩擦力大小不变,B正确;结合B选项解析知,小球在 阶段和在 阶段克服摩
擦力所做的功相同,而弹性轻绳沿竖直方向的分力与小球下滑的距离成正比,所以小球在 阶段
克服弹力做的功小于在 阶段克服弹力做的功,综合可知,小球在 阶段损失的机械能小于在
阶段损失的机械能,C错误;从C到E过程,根据动能定理得 ,若在E点给
小球一个向上的速度 ,从E到C过程,根据动能定理得, ,
联立解得,到达C点的动能 ,D错误。
4.答案:BD
解析:设小球、轻杆b端、正方体物块的速度分别为 ,根据系统机械能守恒定律有
,小球与轻杆b端的角速度相等,由 ,得 ,轻杆b端的线速度沿水平方向的分速度等于正方体物块的速度,即有 ,得 ,所
以 ,联立解得 ,故B、D正确.
5.答案:AD
解析:本题考查功能关系。当工件从传送带底端B滑动到顶端A的过程中,由功能关系可知,摩
擦力对工件所做的功等于工件的动能和重力势能的增加量之和,即等于工件机械能的增量,A正
确,B错误;摩擦力对工件所做的功等于摩擦力与工件对地位移的乘积,而摩擦生热等于摩擦力与
工件相对于传送带滑动的距离的乘积,由题目条件可知,工件在到达A点前与传送带共速,则工
件对地位移大于工件相对于传送带的位移,则摩擦力对工件所做的功大于工件和传送带之间的摩
擦生热,C错误;工件克服重力所做的功等于工件重力势能的增量,D正确。
6.答案:BD
解析:本题考查利用机械能守恒定律分析曲线运动中的能量变化,受力情况等。小球恰好通过C点
时,有 ,从C点飞出后做平抛运动并落在平台 上,有 , ,解得
,即小球落点至少离M点 ,A错误。小球由D经 到P的过程中,只有重
力做功,机械能守恒,B正确。小球从A运动到B的过程中,在A点时速度方向向下,重力的功率
不为零;在B点时速度方向水平向左,重力的功率为零,C错误。如果 间距离为h,小球从
D到B的过程,有 ,小球在B点时,可得 ,解得
,由牛顿第三定律可得小球经过B点时对轨道的压力大小为 ,D正确。
7.答案:B
解析:对小球从A点至C点的过程,由机械能守恒定律有 ,解得
,选项A错误;对小球从A点至E点的过程,由机械能守恒定律有 ,解得
,小球从E点抛出后,假设其能够落在 上,由平抛运动规律有 ,解
得 ,则假设成立,小球恰好落至B点,选项B正确;因为内管壁可提供支持力,所以小球到
达E点时的速度可以为零,选项C错误;若将 轨道拆除,设小球能上升的最大高度为h,则有
,又由机械能守恒定律可知 ,解得 ,选项D错误。
8.答案:BD
解析:滑块从P点运动到R点的过程,由功能关系知,滑块机械能的增量等于电场力、弹簧弹
力、摩擦力三力做功之和,故A错误;电场力做的功转化为小滑块的重力势能、弹簧的弹性势能以及因摩擦产生的热量,所以电势能的减少量大于重力势能和弹簧弹性势能的增加量之和,故B
正确;假设滑块最终停在弹簧原长处,对滑块受力分析可知,此时滑块受力情况和在P点时受力
情况相同,合力向上,不可能静止,故假设不成立,滑块合力为零的位置应在弹簧原长位置上
方,故C错误;从小滑块开始运动至最终停下来的过程,由动能定理得 ,
则有 ,结合功能关系可知 ,结合C项分析可知,弹
性势能增大,说明克服摩擦力所做的功小于电势能的减少量与重力势能增加量之差,故D正确。
9.答案:D
解析:由于只有重力做功,系统的机械能守恒,故选项A错误;C和E球的机械能先增大后减
小,D球的机械能不变,根据系统的机械能守恒知,A和B球的机械能先减小后增大,故选项B错
误;小球B落地时, 的速度均为零, 速度相同,设为v,根据小球
组成的系统机械能守恒得 ,解得 ,故选项C错误;小球A的机械
能先减小后增大,轻杆对A球先做负功后做正功,当轻杆不受力时,小球A的机械能最小,此时
地面对小球C的支持力大小为 ,故选项D正确。
10.答案:C
解析:棋子从最高点落到平台上,竖直方向上做自由落体运动,下落时间 ,故A错误;棋
子在水平方向上做匀速直线运动,根据运动的对称性,上升和下落的时间是相同的,所以棋子在
两平台上落点间的距离 ,故B错误;棋子运动过程中机械能守恒,棋子在最高点的机械
能 ,与落到后一个平台上时的机械能相等,故C正确;根据动能定理,棋子从最
高点到后一个平台上的过程有 ,解得 ,故D错误。
11.答案:(1)18.50
(2)最大值
(3)
(4)AB
解析:(1)游标卡尺的读数为: 。
(2)球在最低点时,由牛顿第二定律可得 ,由此可知,应读出球在最低点时细线的
拉力即拉力的最大值。
(3)由机械能守恒定律可得 ,整理得。
(4)为了减小球做圆周运动的半径的变化,细线要选择伸缩性小的,故A正确。为了减小阻力的
影响,球尽量选择密度大的,体积小的,故B正确。球从静止释放运动到最低点过程中,由满足
机械能守恒的关系式 可知,应测出小球的质量,而不用测出细线的长度,
故C错误。若用弹簧测力计代替拉力传感器,则小球做圆周运动的半径将会发生变化,故D错
误。
12.答案:(1)m
(2)
解析:(1)由题知,当连接小球C的轻绳与竖直方向的夹角为 时,整个装置处于静止状
态,则对小球A受力分析,根据平衡条件有 ,对小球C受力分析,根据平衡条件有
,联立解得 .
(2)设撤去外力后,小球C上升的高度为H,小球 下降的高度为h,根据几何关系有
,设此时小球 的速度为 ,把小球C的速度沿着绳子和垂
直绳子方向进行分解,则有 ,根据系统机械能守恒定律得
,
联立解得 .

