文档内容
第 18 讲 圆周运动
(模拟精练+真题演练)
1.(2023·四川眉山·校考模拟预测)如图甲所示,修正带是通过两个齿轮相互咬合进行工作的,其原理可
简化为图乙中所示的模型。A、B是大、小齿轮边缘上的两点,C是大轮上的一点。若大轮半径是小轮半径
的2倍,小轮中心到A点和大轮中心到C点的距离之比为2∶1,则A、B、C三点( )
A.线速度大小之比为4∶4∶1 B.角速度之比为1∶1∶1
C.转速之比为2∶2∶1 D.向心加速度大小之比为2∶1∶1
【答案】A
【详解】AB. 是大、小齿轮边缘上的两点,可知 又 , 可得 由于
两点都在大轮上,可知 又 , 可得 则 三点线速度大小之比为
, 三点角速度之比为 选项A正确,B错误;
C.根据角速度和转速的关系有 可知 三点转速之比为 选项
C错误;
D.根据向心加速度公式有 可知, 三点向心加速度大小之比为
选项D错误。故选A。
2.(2023·湖北武汉·统考模拟预测)剪纸艺术源远流长,经久不衰,是中国民间艺术中的瑰宝。将如图所
示具有对称性的剪纸平放并固定在水平圆盘上,剪纸中心与圆盘中心重合,圆盘匀速转动,在暗室中用每
秒闪光10次的频闪光源照射圆盘,暗室中静止不动的观察者观察到剪纸相对静止,则圆盘的转速至少为(
)A.0.02r/s B.2r/s C.4r/s D.
【答案】B
【详解】暗室中静止不动的观察者观察到剪纸相对静止,则频闪光源照射圆盘时,圆盘转过的角度是
的倍数,则 内至少转过 ,则角速度最小为 则转速至少为 故
选B。
3.(2023·广东广州·华南师大附中校考三模)如图所示为华附校园内的风杯式风速传感器,其感应部分由
三个相同的半球形空杯组成,称为风杯。三个风杯对称地位于水平面内互成120°的三叉型支架末端,与中
间竖直轴的距离相等。开始刮风时,空气流动产生的风力推动静止的风杯开始绕竖直轴在水平面内转动,
风速越大,风杯转动越快。若风速保持不变,三个风杯最终会匀速转动,根据风杯的转速,就可以确定风
速,则( )
A.若风速不变,三个风杯最终加速度为零
B.任意时刻,三个风杯转动的速度都相同
C.开始刮风时,风杯所受合外力沿水平方向指向旋转轴
D.风杯匀速转动时,其转动周期越大,测得的风速越小
【答案】D
【详解】A.若风速不变,三个风杯最终做匀速圆周运动,其合外力不为零,根据牛顿第二定律可知,其
加速度不为零,故A错误;
B.三个风杯属于同轴转动,角速度相同,而三个风杯做圆周运动的半径相同,由 可知,任意时刻
三个风杯的线速度大小相同,方向不同,即速度不同,故B错误;
C.未刮风时,风杯处于平衡状态,重力和连接风杯的杆对风杯的弹力平衡,而开始刮风时,风杯所受合
外力沿水平方向,与风力方向相反,并不指向旋转轴,故C错误;
D.当风杯匀速转动时,根据 可知,其转动周期越大,测得的风速越小,故D正确。故选D。
4.(2023·河北沧州·河北省吴桥中学校考模拟预测)2022年6月5日,法国网球公开赛圆满落幕。高速旋
转的网球在空气中飞行将受到垂直于气流方向的横向力的作用,球体产生横向位移,改变原来的运动轨迹,
这就是马格努斯效应。研究表明,马格努斯力的大小与球在流体中飞行的瞬时速度v、球旋转的角速度
ω、球半径R以及流体的密度ρ、流体与球面间的粘性系数A有关,其表达式为 ,关于表达
式中A的单位。下列说法正确的是( )
A.国际单位制中,A的单位是N/m3
B.国际单位制中,A的单位是kg/radC.国际单位制中,A的单位是kg/m2
D.国际单位制中,A是一个没有单位的比例系数
【答案】D
【详解】国际单位制中, 中, 的单位是kg,可以看作质量m,由向心加速度 可
知 就是加速度a,F与ma的单位相同,由此可见国际单位制中,A是一个没有单位的比例系数。
故选D。
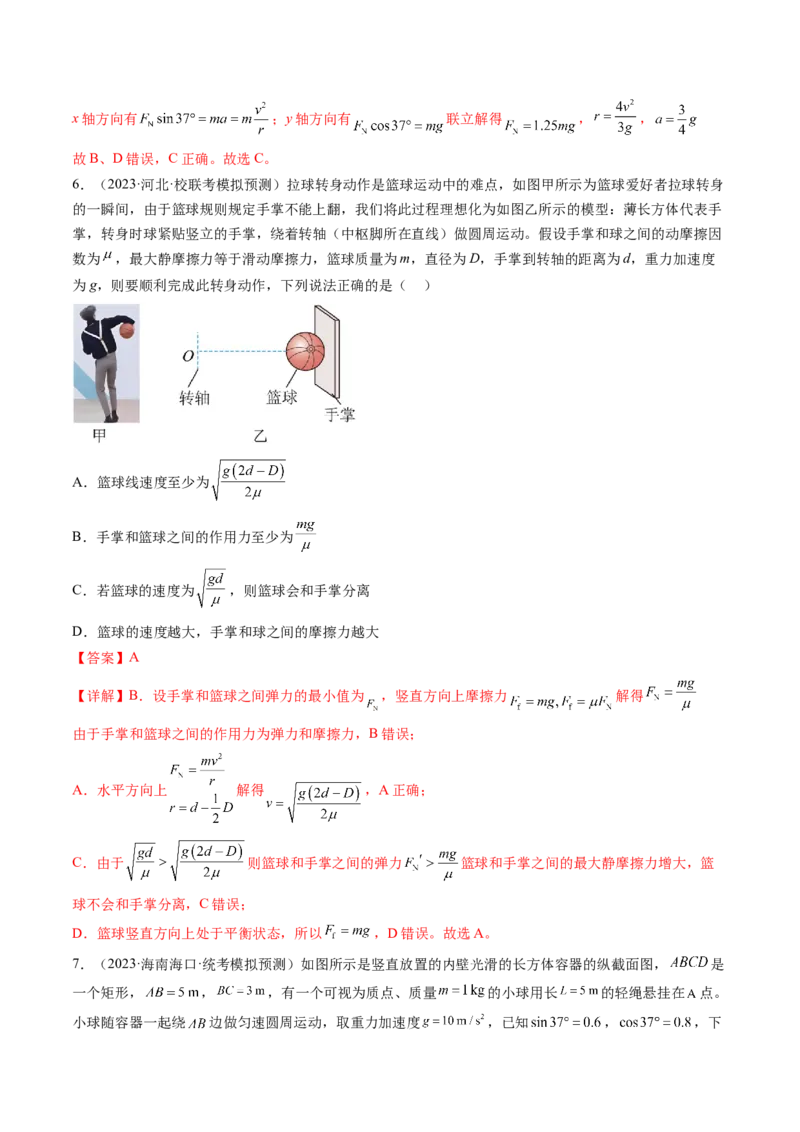
5.(2023·河北沧州·河北省吴桥中学校考模拟预测)2021年3月27日,我国花样滑冰运动员陈虹伊,在
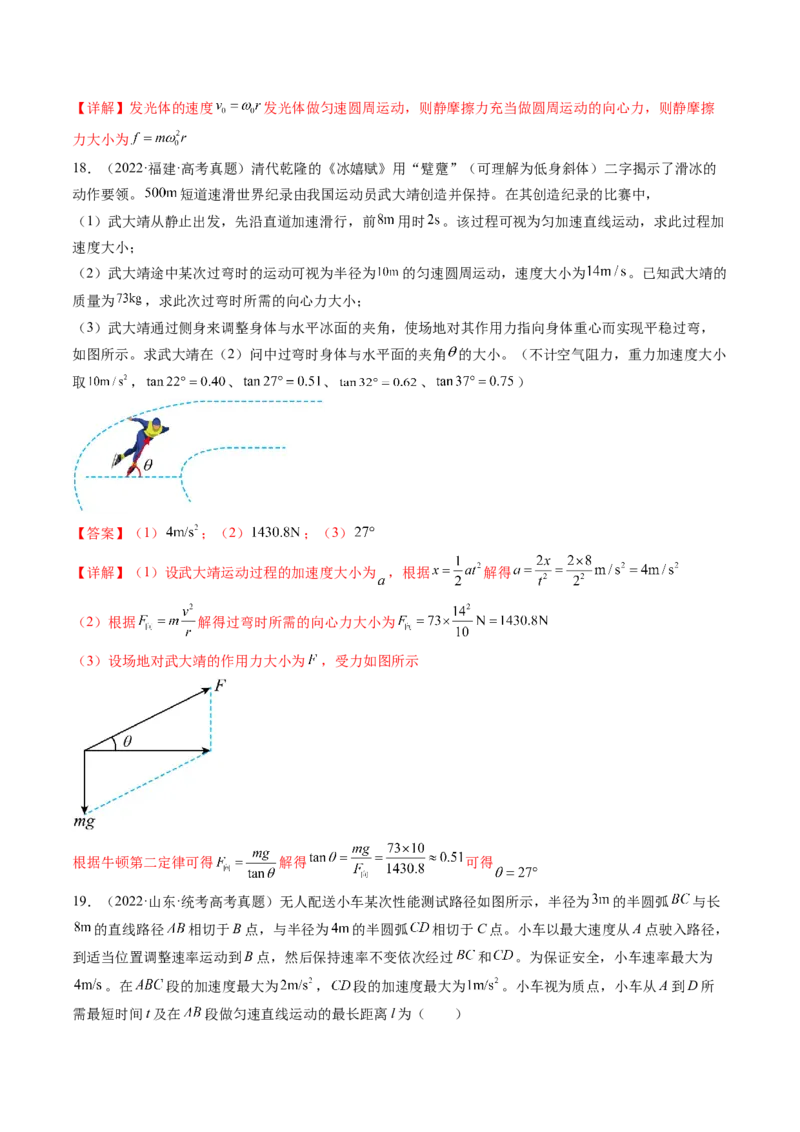
2021世界花样滑冰锦标赛上以162.79分的总成绩排在女子单人滑第二十一名。如图甲是我国奥运冠军花样
滑冰运动员陈虹伊在赛场上的情形,假设在比赛的某段时间她单脚着地,以速度v做匀速圆周运动,如图
乙冰鞋与冰面间的夹角为37°,陈虹伊的质量为m,重力加速度为g,sin37°=0.6,cos37°=0.8,不计冰鞋对
陈虹伊的摩擦,下列说法正确的是( )
A.陈虹伊受重力、冰鞋的支持力、向心力的作用
B.冰鞋对陈虹伊的支持力大小为
C.陈虹伊做匀速圆周运动的半径为
D.陈虹伊做匀速圆周运动的向心加速度大小为
【答案】C
【详解】A.陈虹伊此时只受到重力和冰鞋的支持力的作用,A错误;
BCD.陈虹伊受到的力如图所示x轴方向有 ;y轴方向有 联立解得 , ,
故B、D错误,C正确。故选C。
6.(2023·河北·校联考模拟预测)拉球转身动作是篮球运动中的难点,如图甲所示为篮球爱好者拉球转身
的一瞬间,由于篮球规则规定手掌不能上翻,我们将此过程理想化为如图乙所示的模型:薄长方体代表手
掌,转身时球紧贴竖立的手掌,绕着转轴(中枢脚所在直线)做圆周运动。假设手掌和球之间的动摩擦因
数为 ,最大静摩擦力等于滑动摩擦力,篮球质量为m,直径为D,手掌到转轴的距离为d,重力加速度
为g,则要顺利完成此转身动作,下列说法正确的是( )
A.篮球线速度至少为
B.手掌和篮球之间的作用力至少为
C.若篮球的速度为 ,则篮球会和手掌分离
D.篮球的速度越大,手掌和球之间的摩擦力越大
【答案】A
【详解】B.设手掌和篮球之间弹力的最小值为 ,竖直方向上摩擦力 解得
由于手掌和篮球之间的作用力为弹力和摩擦力,B错误;
A.水平方向上 解得 ,A正确;
C.由于 则篮球和手掌之间的弹力 篮球和手掌之间的最大静摩擦力增大,篮
球不会和手掌分离,C错误;
D.篮球竖直方向上处于平衡状态,所以 ,D错误。故选A。
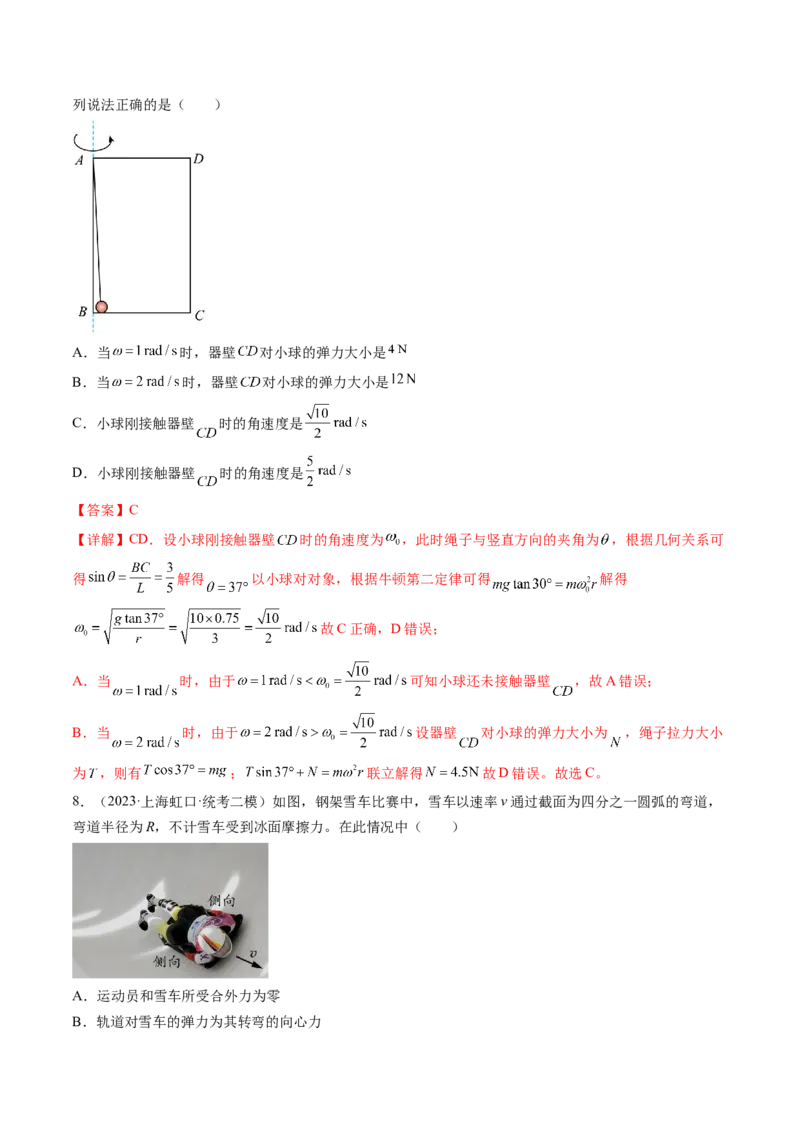
7.(2023·海南海口·统考模拟预测)如图所示是竖直放置的内壁光滑的长方体容器的纵截面图, 是
一个矩形, , ,有一个可视为质点、质量 的小球用长 的轻绳悬挂在 点。
小球随容器一起绕 边做匀速圆周运动,取重力加速度 ,已知 , ,下列说法正确的是( )
A.当 时,器壁 对小球的弹力大小是
B.当 时,器壁 对小球的弹力大小是
C.小球刚接触器壁 时的角速度是
D.小球刚接触器壁 时的角速度是
【答案】C
【详解】CD.设小球刚接触器壁 时的角速度为 ,此时绳子与竖直方向的夹角为 ,根据几何关系可
得 解得 以小球对对象,根据牛顿第二定律可得 解得
故C正确,D错误;
A.当 时,由于 可知小球还未接触器壁 ,故A错误;
B.当 时,由于 设器壁 对小球的弹力大小为 ,绳子拉力大小
为 ,则有 ; 联立解得 故D错误。故选C。
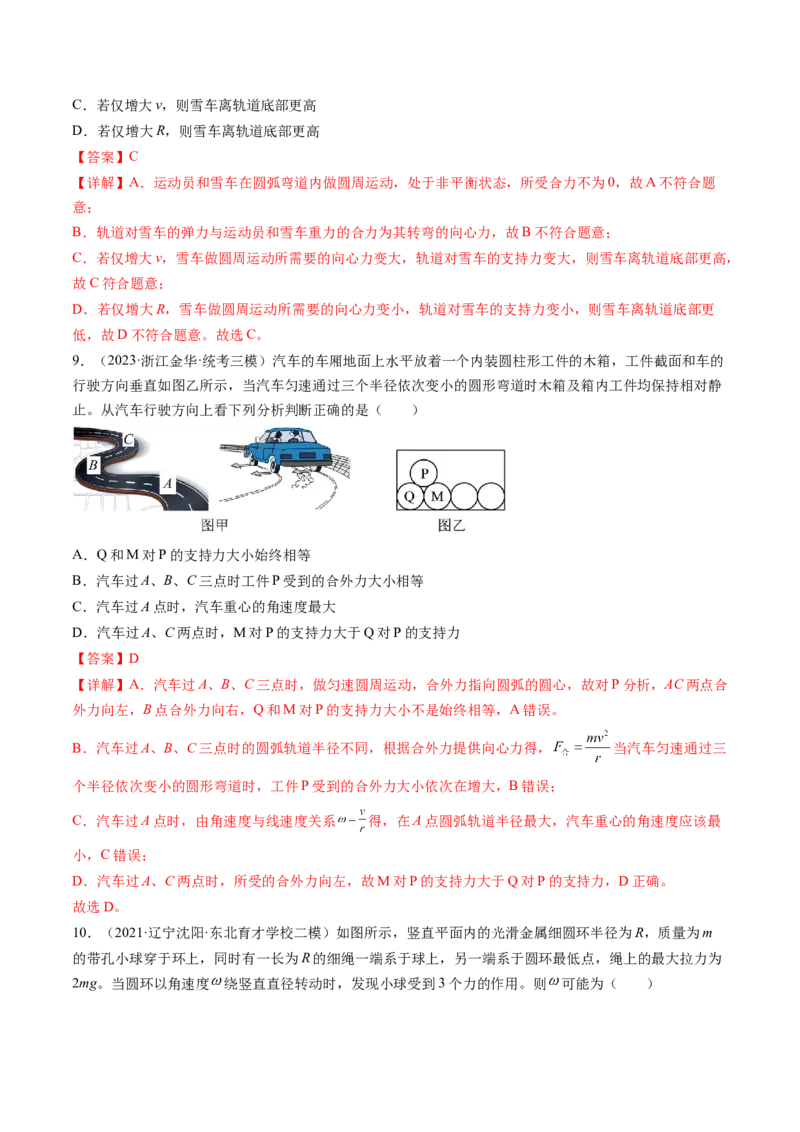
8.(2023·上海虹口·统考二模)如图,钢架雪车比赛中,雪车以速率v通过截面为四分之一圆弧的弯道,
弯道半径为R,不计雪车受到冰面摩擦力。在此情况中( )
A.运动员和雪车所受合外力为零
B.轨道对雪车的弹力为其转弯的向心力C.若仅增大v,则雪车离轨道底部更高
D.若仅增大R,则雪车离轨道底部更高
【答案】C
【详解】A.运动员和雪车在圆弧弯道内做圆周运动,处于非平衡状态,所受合力不为0,故A不符合题
意;
B.轨道对雪车的弹力与运动员和雪车重力的合力为其转弯的向心力,故B不符合题意;
C.若仅增大v,雪车做圆周运动所需要的向心力变大,轨道对雪车的支持力变大,则雪车离轨道底部更高,
故C符合题意;
D.若仅增大R,雪车做圆周运动所需要的向心力变小,轨道对雪车的支持力变小,则雪车离轨道底部更
低,故D不符合题意。故选C。
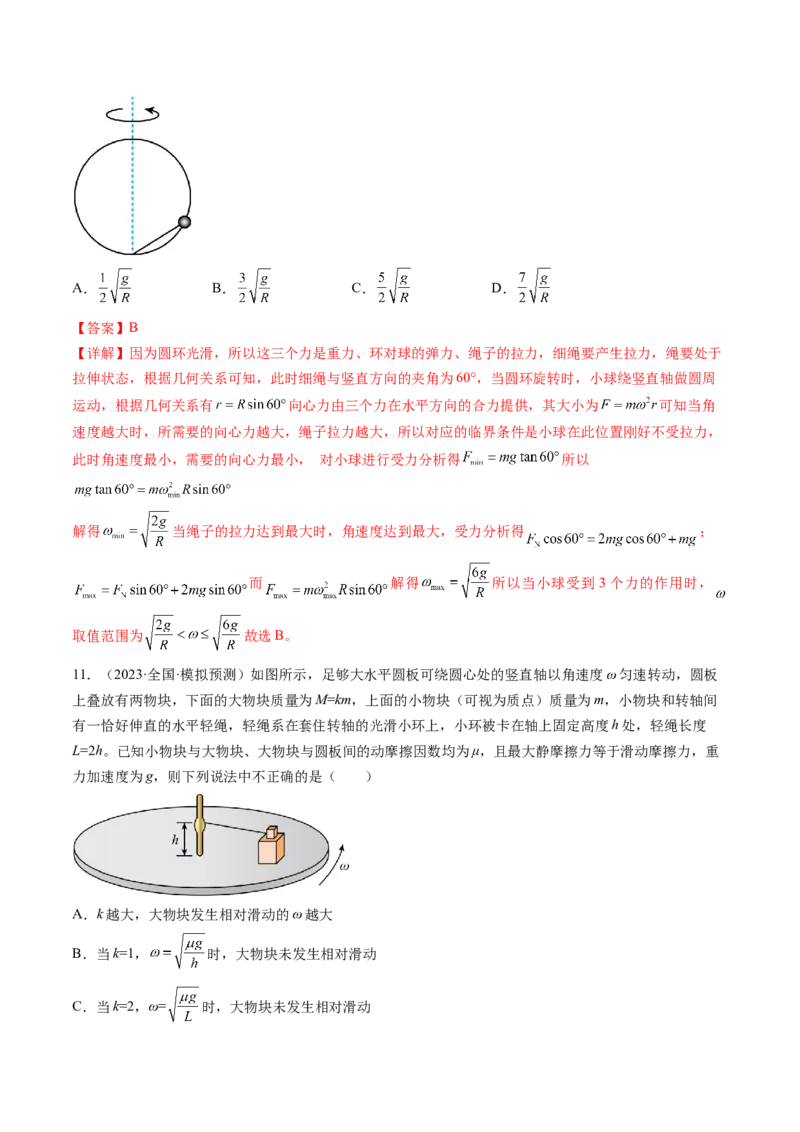
9.(2023·浙江金华·统考三模)汽车的车厢地面上水平放着一个内装圆柱形工件的木箱,工件截面和车的
行驶方向垂直如图乙所示,当汽车匀速通过三个半径依次变小的圆形弯道时木箱及箱内工件均保持相对静
止。从汽车行驶方向上看下列分析判断正确的是( )
A.Q和M对P的支持力大小始终相等
B.汽车过A、B、C三点时工件P受到的合外力大小相等
C.汽车过A点时,汽车重心的角速度最大
D.汽车过A、C两点时,M对P的支持力大于Q对P的支持力
【答案】D
【详解】A.汽车过A、B、C三点时,做匀速圆周运动,合外力指向圆弧的圆心,故对P分析,AC两点合
外力向左,B点合外力向右,Q和M对P的支持力大小不是始终相等,A错误。
B.汽车过A、B、C三点时的圆弧轨道半径不同,根据合外力提供向心力得, 当汽车匀速通过三
个半径依次变小的圆形弯道时,工件P受到的合外力大小依次在增大,B错误;
C.汽车过A点时,由角速度与线速度关系 得,在A点圆弧轨道半径最大,汽车重心的角速度应该最
小,C错误;
D.汽车过A、C两点时,所受的合外力向左,故M对P的支持力大于Q对P的支持力,D正确。
故选D。
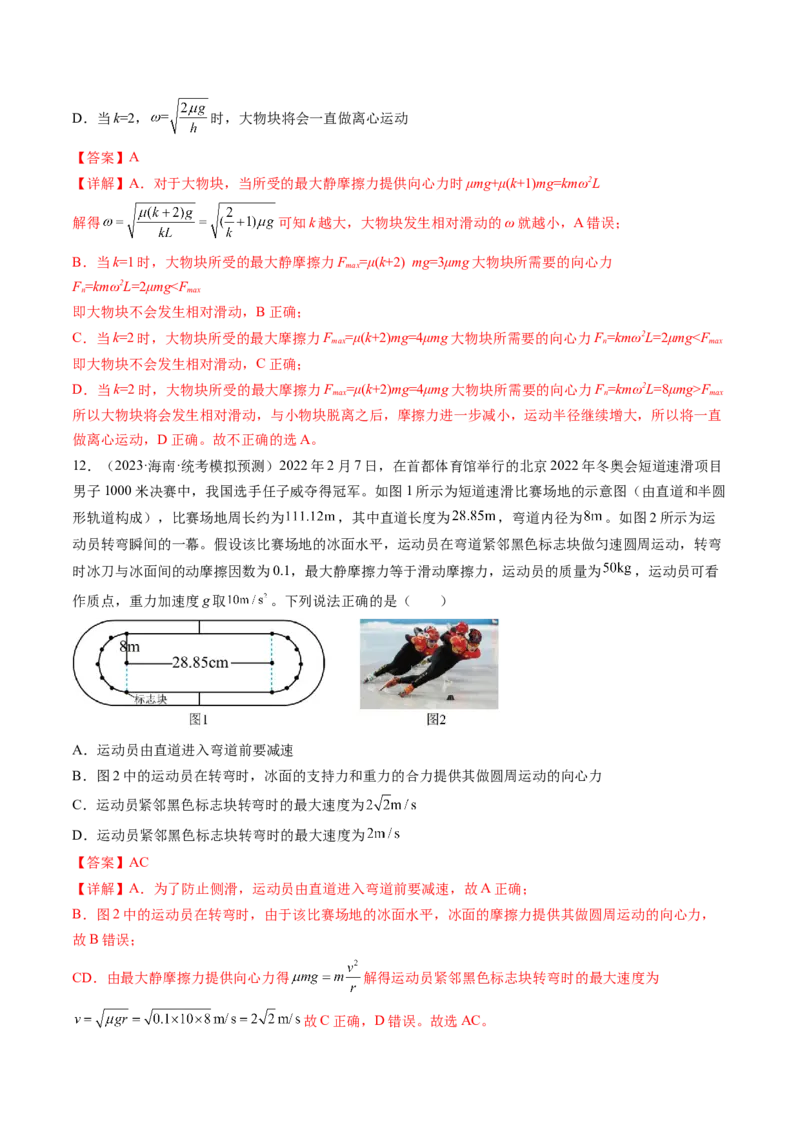
10.(2021·辽宁沈阳·东北育才学校二模)如图所示,竖直平面内的光滑金属细圆环半径为R,质量为m
的带孔小球穿于环上,同时有一长为R的细绳一端系于球上,另一端系于圆环最低点,绳上的最大拉力为
2mg。当圆环以角速度 绕竖直直径转动时,发现小球受到3个力的作用。则 可能为( )A. B. C. D.
【答案】B
【详解】因为圆环光滑,所以这三个力是重力、环对球的弹力、绳子的拉力,细绳要产生拉力,绳要处于
拉伸状态,根据几何关系可知,此时细绳与竖直方向的夹角为60°,当圆环旋转时,小球绕竖直轴做圆周
运动,根据几何关系有 向心力由三个力在水平方向的合力提供,其大小为 可知当角
速度越大时,所需要的向心力越大,绳子拉力越大,所以对应的临界条件是小球在此位置刚好不受拉力,
此时角速度最小,需要的向心力最小, 对小球进行受力分析得 所以
解得 当绳子的拉力达到最大时,角速度达到最大,受力分析得 ;
而 解得 所以当小球受到3个力的作用时,
取值范围为 故选B。
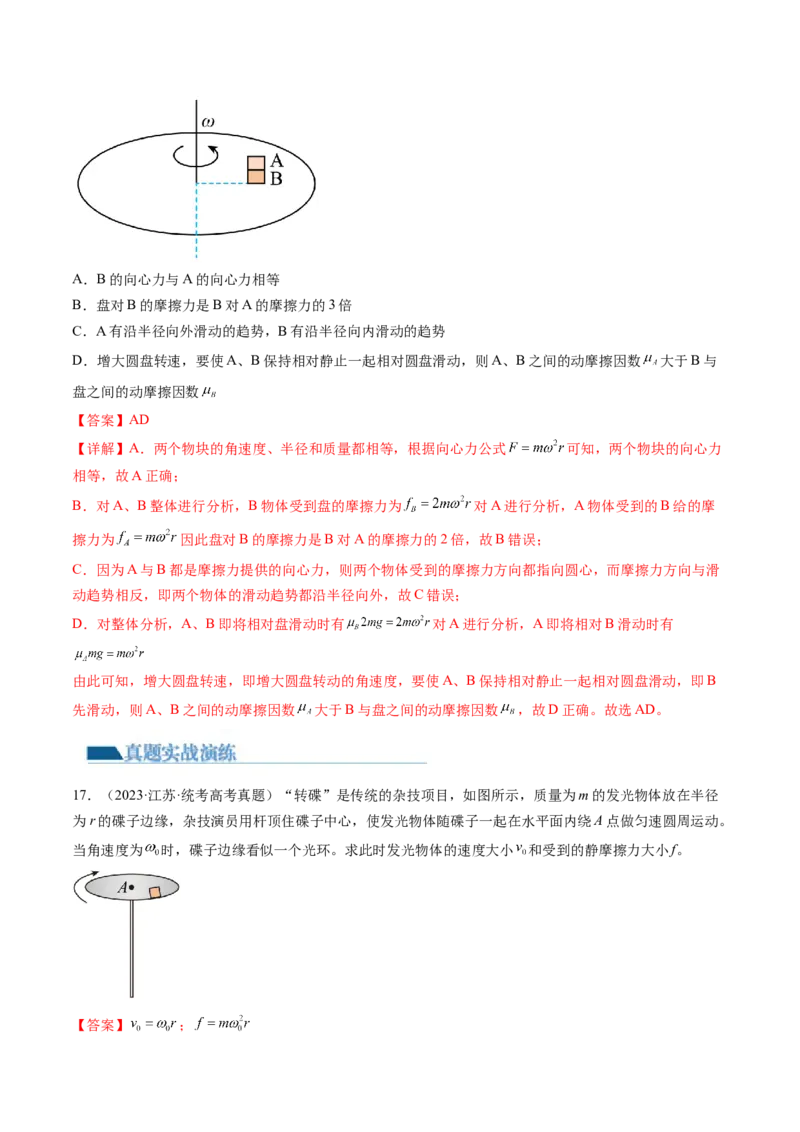
11.(2023·全国·模拟预测)如图所示,足够大水平圆板可绕圆心处的竖直轴以角速度ω匀速转动,圆板
上叠放有两物块,下面的大物块质量为M=km,上面的小物块(可视为质点)质量为m,小物块和转轴间
有一恰好伸直的水平轻绳,轻绳系在套住转轴的光滑小环上,小环被卡在轴上固定高度h处,轻绳长度
L=2h。已知小物块与大物块、大物块与圆板间的动摩擦因数均为μ,且最大静摩擦力等于滑动摩擦力,重
力加速度为g,则下列说法中不正确的是( )
A.k越大,大物块发生相对滑动的ω越大
B.当k=1, 时,大物块未发生相对滑动
C.当k=2,ω= 时,大物块未发生相对滑动D.当k=2, 时,大物块将会一直做离心运动
【答案】A
【详解】A.对于大物块,当所受的最大静摩擦力提供向心力时μmg+μ(k+1)mg=kmω2L
解得 可知k越大,大物块发生相对滑动的ω就越小,A错误;
B.当k=1时,大物块所受的最大静摩擦力F =μ(k+2) mg=3μmg大物块所需要的向心力
max
F=kmω2L=2μmgF
max n max
所以大物块将会发生相对滑动,与小物块脱离之后,摩擦力进一步减小,运动半径继续增大,所以将一直
做离心运动,D正确。故不正确的选A。
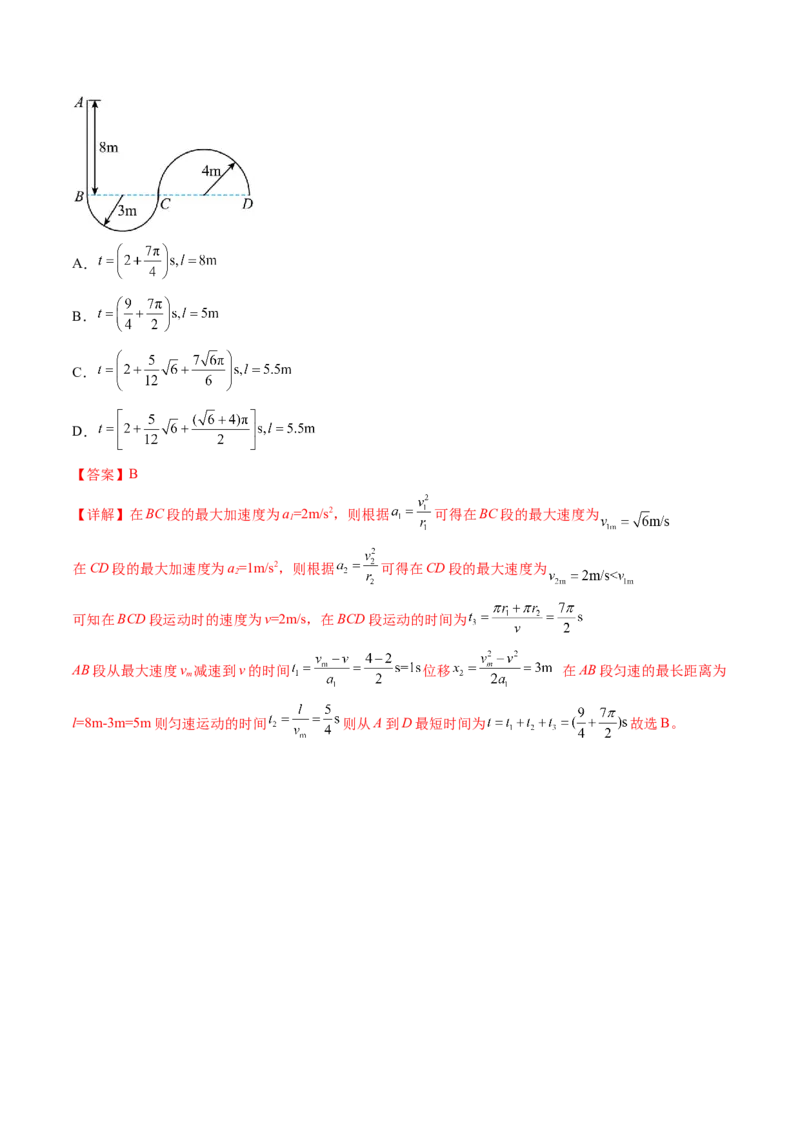
12.(2023·海南·统考模拟预测)2022年2月7日,在首都体育馆举行的北京2022年冬奥会短道速滑项目
男子1000米决赛中,我国选手任子威夺得冠军。如图1所示为短道速滑比赛场地的示意图(由直道和半圆
形轨道构成),比赛场地周长约为 ,其中直道长度为 ,弯道内径为 。如图2所示为运
动员转弯瞬间的一幕。假设该比赛场地的冰面水平,运动员在弯道紧邻黑色标志块做匀速圆周运动,转弯
时冰刀与冰面间的动摩擦因数为0.1,最大静摩擦力等于滑动摩擦力,运动员的质量为 ,运动员可看
作质点,重力加速度g取 。下列说法正确的是( )
A.运动员由直道进入弯道前要减速
B.图2中的运动员在转弯时,冰面的支持力和重力的合力提供其做圆周运动的向心力
C.运动员紧邻黑色标志块转弯时的最大速度为
D.运动员紧邻黑色标志块转弯时的最大速度为
【答案】AC
【详解】A.为了防止侧滑,运动员由直道进入弯道前要减速,故A正确;
B.图2中的运动员在转弯时,由于该比赛场地的冰面水平,冰面的摩擦力提供其做圆周运动的向心力,
故B错误;
CD.由最大静摩擦力提供向心力得 解得运动员紧邻黑色标志块转弯时的最大速度为
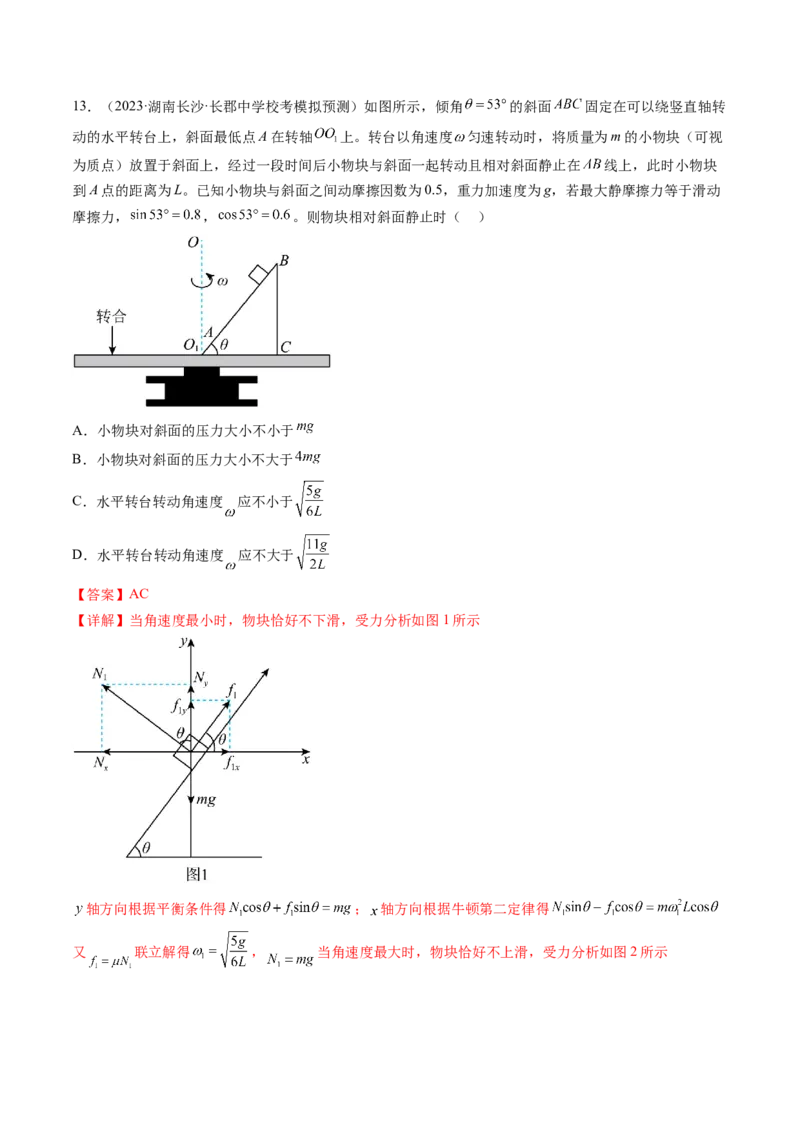
故C正确,D错误。故选AC。13.(2023·湖南长沙·长郡中学校考模拟预测)如图所示,倾角 的斜面 固定在可以绕竖直轴转
动的水平转台上,斜面最低点A在转轴 上。转台以角速度 匀速转动时,将质量为m的小物块(可视
为质点)放置于斜面上,经过一段时间后小物块与斜面一起转动且相对斜面静止在 线上,此时小物块
到A点的距离为L。已知小物块与斜面之间动摩擦因数为0.5,重力加速度为g,若最大静摩擦力等于滑动
摩擦力, , 。则物块相对斜面静止时( )
A.小物块对斜面的压力大小不小于
B.小物块对斜面的压力大小不大于
C.水平转台转动角速度 应不小于
D.水平转台转动角速度 应不大于
【答案】AC
【详解】当角速度最小时,物块恰好不下滑,受力分析如图1所示
轴方向根据平衡条件得 ; 轴方向根据牛顿第二定律得
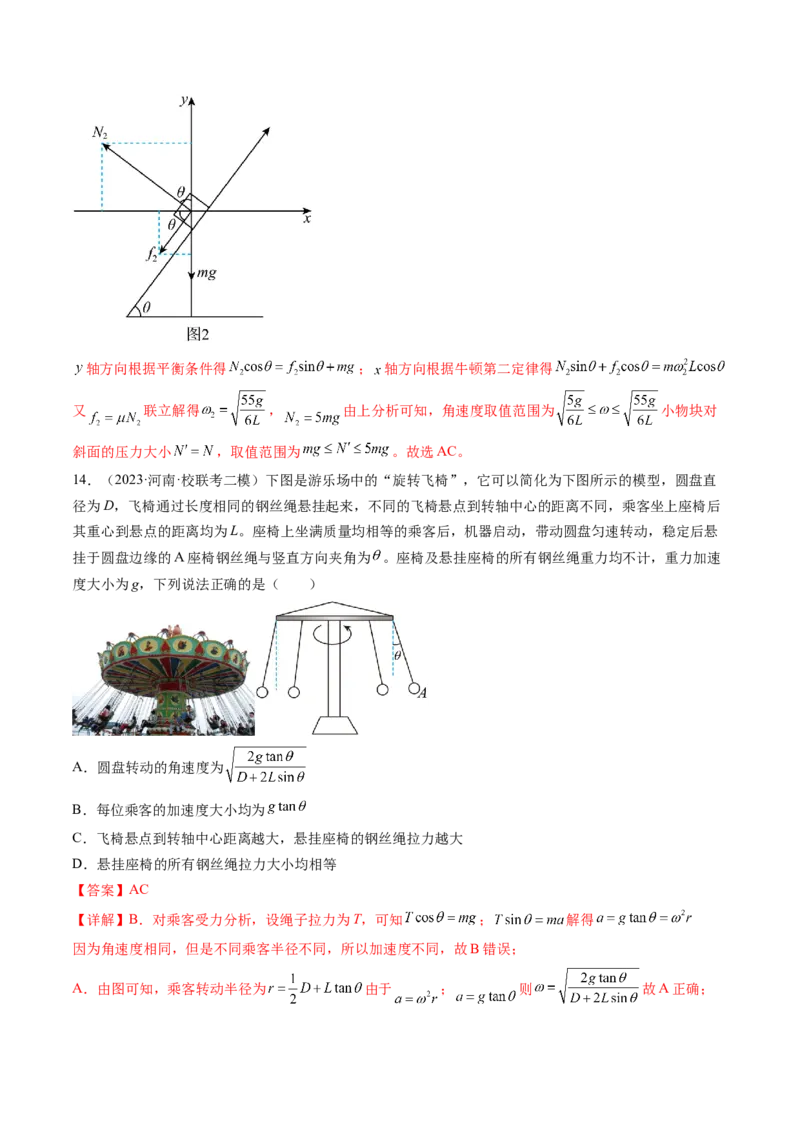
又 联立解得 , 当角速度最大时,物块恰好不上滑,受力分析如图2所示轴方向根据平衡条件得 ; 轴方向根据牛顿第二定律得
又 联立解得 , 由上分析可知,角速度取值范围为 小物块对
斜面的压力大小 ,取值范围为 。故选AC。
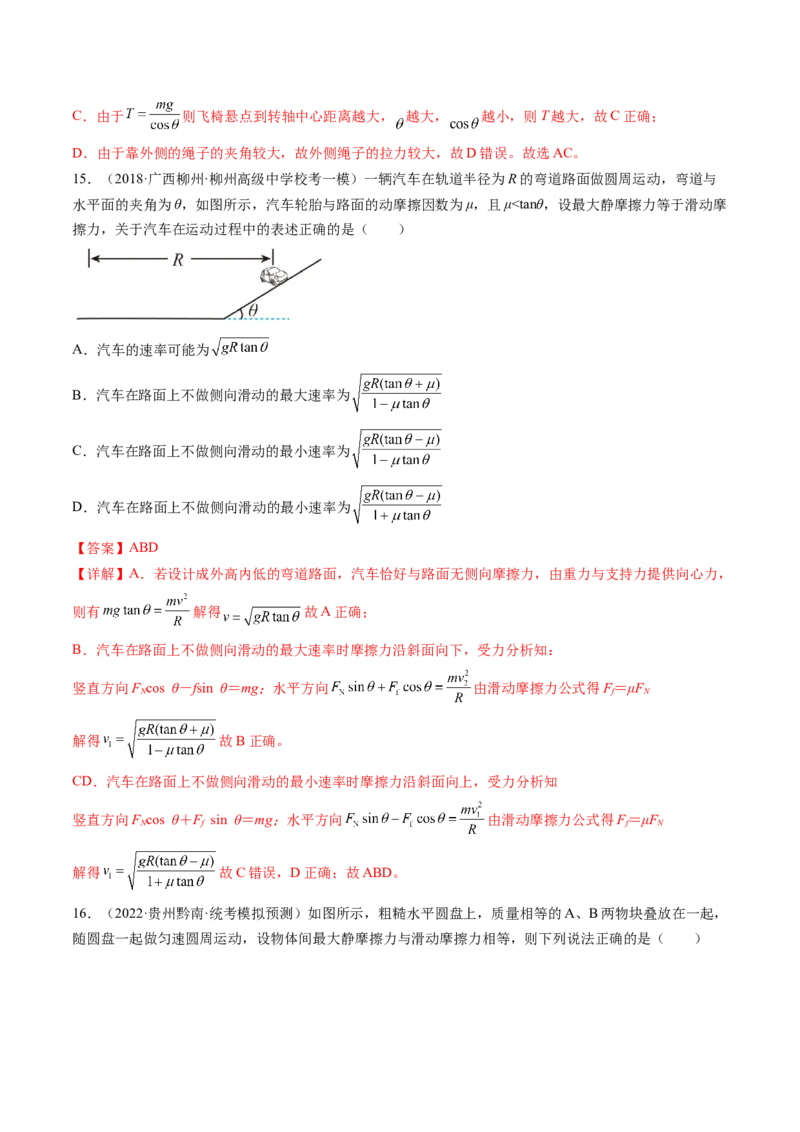
14.(2023·河南·校联考二模)下图是游乐场中的“旋转飞椅”,它可以简化为下图所示的模型,圆盘直
径为D,飞椅通过长度相同的钢丝绳悬挂起来,不同的飞椅悬点到转轴中心的距离不同,乘客坐上座椅后
其重心到悬点的距离均为L。座椅上坐满质量均相等的乘客后,机器启动,带动圆盘匀速转动,稳定后悬
挂于圆盘边缘的A座椅钢丝绳与竖直方向夹角为 。座椅及悬挂座椅的所有钢丝绳重力均不计,重力加速
度大小为g,下列说法正确的是( )
A.圆盘转动的角速度为
B.每位乘客的加速度大小均为
C.飞椅悬点到转轴中心距离越大,悬挂座椅的钢丝绳拉力越大
D.悬挂座椅的所有钢丝绳拉力大小均相等
【答案】AC
【详解】B.对乘客受力分析,设绳子拉力为T,可知 ; 解得
因为角速度相同,但是不同乘客半径不同,所以加速度不同,故B错误;
A.由图可知,乘客转动半径为 由于 ; 则 故A正确;C.由于 则飞椅悬点到转轴中心距离越大, 越大, 越小,则T越大,故C正确;
D.由于靠外侧的绳子的夹角较大,故外侧绳子的拉力较大,故D错误。故选AC。
15.(2018·广西柳州·柳州高级中学校考一模)一辆汽车在轨道半径为R的弯道路面做圆周运动,弯道与
水平面的夹角为θ,如图所示,汽车轮胎与路面的动摩擦因数为μ,且μ
