文档内容
万有引力
一. 黄金代换公式的应用
1. 不计自转
1.(2020年新课标1)火星的质量约为地球质量的 ,半径约为地球半径的 ,则同一物体在火
1 1
星表面与在地球表面受到的引力的比值约为( 10 ) 2
A. 0.2 B. 0.4 C. 2.0 D. 2.5
2. 一飞船围绕地球做匀速圆周运动,其离地面的高度为H,若已知地球表面重力加速度为
g,地球半径R。则飞船所在处的重力加速度大小( )
Hg Rg R2g H2g
A. B. C. D.
R ( H +R ) ( H +R )2 R2
3.(2020年新课标3)“嫦娥四号”探测器于2019年1月在月球背面成功着陆,着陆前曾绕月球
飞行,某段时间可认为绕月做匀速圆周运动,圆周半径为月球半径的K倍。已知地球半径R
是月球半径的P倍,地球质量是月球质量的Q倍,地球表面重力加速度大小为g。则“嫦娥
四号”绕月球做圆周运动的速率为( )
A. B. C. D.
𝑅𝑅𝑅𝑅𝑅𝑅 𝑅𝑅𝑄𝑄𝑅𝑅𝑅𝑅 𝑅𝑅𝑄𝑄𝑅𝑅 𝑅𝑅𝑄𝑄𝑅𝑅
�𝑄𝑄𝑄𝑄 � 𝑄𝑄 �𝑅𝑅𝑄𝑄 �𝑄𝑄𝑅𝑅
4.为了测量某行星的质量和半径,宇航员记录了登陆舱在该行星表面做圆周运动的周期 T,
登陆舱在行星表面着陆后,用弹簧称称量一个质量为m的砝码读数为N。已知引力常量为G。
则下列计算中错误的是( )
N3T4 4π2NT2
A.该行星的质量为 B.该行星的半径为
16π4m3 m
3π NT
C.该行星的密度为 D.在该行星的第一宇宙速度为
GT2 2πm
5. 某行星的质量约为地球质量的4倍,若从该行星和地球的表面附近相同的高度处各由静
止释放一金属小球,小球自由下落到表面经历的时间之比为3∶4,已知地球的半径为R,
由此可知,该行星的半径为( )
1 3 5
A. R B. R C.2R D. R
2 2 2
16. (2020山东)我国将在今年择机执行“天问1号”火星探测任务。质量为m的着陆器在着陆火
星前,会在火星表面附近经历一个时长为t 、速度由v 减速到零的过程。已知火星的质量约
0 0
为地球的0.1倍,半径约为地球的0.5倍,地球表面的重力加速度大小为g,忽略火星大气
阻力。若该减速过程可视为一个竖直向下的匀减速直线运动,此过程中着陆器受到的制动力
大小约为( )
A. B.
𝑣𝑣0 𝑣𝑣0
𝑚𝑚�0.4𝑔𝑔−𝑡𝑡0� 𝑚𝑚�0.4𝑔𝑔+𝑡𝑡0�
C. D.
𝑣𝑣0 𝑣𝑣0
𝑚𝑚�0.2𝑔𝑔−𝑡𝑡0� 𝑚𝑚�0.2𝑔𝑔+𝑡𝑡0�
7.已知某半径为r 的质量分布均匀的天体,测得它的一个卫星的圆轨道的半径为r,卫星运
0
行的周期为T。假设在该天体表面沿竖直方向以初速度v 向上抛出一个物体,不计阻力,求
0
它可以到达的最大高度h是( )
A.
v2 0 T2(r-r 0 )2
B.
v2 0 T2(r-r 0 )2
C.
v2 0 T2r2 E0
D.
v 0 2T2r E0 2
EA 4π2r3 A AAEA 8π2r3 A AAEAAEA4π2r3A AAEAAEA8π2r3
E E E E E E
8. (2021届耀华校一模)我国于2020年7月成功发射火星探测器“天问1号”,预计“天问1
号”经过10个月左右的飞行将到达火星,着陆火星表面并进行巡视探测。假设探测器在火星
表面和地球表面以相同的速度竖直上抛一物体,其在地球上落回抛出点的时间是火星上的a
倍,已知地球半径与火星半径之比为b,不计地球和火星的自转及其表面气体的阻力。下列
说法正确的是:
A.地球绕太阳运动周期的平方与火星绕太阳运动周期的平方之比为b3
B.地球表面与火星表面的重力加速度大小之比为a:1
C.地球与火星的质量之比为b2:a
D.地球与火星的第一宇宙速度大小之比为 b: a
9.(2019 南开区一模)宇航员在地球表面附近高 h 处释放一质量为 m 的物体,经时间 t 后
落回月球表面。已知月球的半径为R,引力常量为G。忽略月球自转影响,则( )
2R2h
A月球的质量为
Gt2
2Rh
B在月球表面附近绕月球做匀速圆周运动的宇宙飞船速率为
t
2mh
C该物体在月球表面受到月球的引力为
t2
h
D该物体在月球表面的重力加速度为
t2
22.自转对重力加速度的影响
1. 地球赤道上的物体重力加速度为g,物体在赤道上随地球自转的向心加速度为a,要使赤
道上的物体“飘”起来,则地球的转速就应为原来的( )
g g+a g-a g
A. 倍 B. 倍 C. 倍 D. 倍
AaA A a EA A a EA A aAE
E
2. 质量均匀分布的某球形行星的自转周期为T,现在在该行星表面测量一个物体的重力,在
n−1
该行星的赤道附近测量结果为在两极测量结果的 ,万有引力恒量为 G,则该行星的密
n
度为( )
3π 3nπ 3nπ (3 n−1)π
A. B. C. D.
nGT2 GT2 (n-1)GT2 nGT2
3. 随着科技的发展,人类对外太空的探索不断深入,研究人员在某未知天体上做如下实验:
将质量为2kg的物体竖直悬挂在弹簧秤上,稳定时,在赤道处弹簧秤读数为10N,在南北极
10
处弹簧秤读数为 12N。如果该未知天体受到其它天体的影响,其自转周期变为原来的 。,
9
则该物体在赤道上的重力约为( )
A.10N B.12N C.10.4N D.9.5N
4. 已知一质量为m的物体静止在北极与赤道对地面的压力差为∆N,假设地球是质量均匀
的球体,半径为R,地球两极的重力加速度为g。则( )
mR 2mR
A.地球的自转周期为T =2π B.地球的自转周期为T =π
∆N ∆N
1 1
C.地球同步卫星的轨道半径为
mg
3
R
D.地球同步卫星的轨道半径为
2
mg
3
R
∆N ∆N
5. 组成星球的物质是靠引力吸引在一起的,这样的星球有一个最大的自转速率,如果超出
了该速率,星球的万有引力将不足以维持其赤道附近的物体随星球做圆周运动。假设地球可
视为质量均匀分布的星球,地球半径为R、地球北极表面附近的重力加速度为g、引力常量
为G、地球质量为M,则地球的最大自转角速度ω为:( )
GM GM g R
A.ω= 2π B.ω= C.ω= D.ω= 2π
R3 R3 R g
36. 据每日邮报2014年4月18日报道,美国国家航空航天局(NASA)目前宣布首次在太阳
系外发现“类地”行星Kepler-186f。假如宇航员乘坐宇宙飞船到达该行星,进行科学观测:该
行星自转周期为T;宇航员在该行星“北极”距该行星地面附近h处自由释放—个小球(引力视
为恒力),落地时间为 t ;宇航员在该行星“赤道”距该行星地面附近 h 处自由释放—个小球
1
(引力视为恒力),落地时间为t 。则行星的半径R的值( )
2
(t2 +t2)hT2 (t2 +t2)hT2 (t2 −t2)hT2 (t2 −t2)hT2
A.R = 2 1 B.R = 2 1 C.R = 2 1 D.R = 2 1
4π2t2t2 2π2t2t2 2π2t2t2 4π2t2t2
1 2 1 2 1 2 1 2
7.(2019 一中四月考)将一质量为 m 的物体分别放在地球的南北两极点时,该物体的重力
均为mg;将该物体放在地球赤道上时,该物体的重力为mg。假设地球可视为质量均匀分布
0
的球体,半径为R,已知引力常量为G,则由以上信息可得出( )
gR2 g
A.地球的质量为 B.地球同步卫星的离地高度为R 0
3
G g −g
0
R
C.地球自转的周期为2π D.地球的第-宇宙速度大小为 gR
g −g
0
8、(2014新课标2)假设地球可视为质量均匀分布的球体,已知地球表面的重力加速度在两
极的大小为g ,在赤道的大小为g;地球自转的周期为T,引力常数为G,则地球的密度为( )
0
3π g −g 3π g 3π 3π g
A. 0 B. 0 C. D. 0
GT2 g GT2 g −g GT2 GT2 g
0 0
9. 宇航员在某星球上为了探测其自转周期做了如下实验:在该星球两极点,用弹簧秤测得
质量为M的砝码所受重力为F,在赤道测得该砝码所受重力为F′,他还发现探测器绕该星
球表面做匀速圆周运动的周期为T,假设该星球可视为质量均匀分布的球体,则其自转周期
为()
F′ F F −F′ F
A.T B.T C.T D.T
F F′ F F −F′
410、(2014北京)(18分)万有引力定律揭示了天体运动规律与地上物体运动规律具有内在
的一致性。
(1)用弹簧秤称量一个相对于地球静止的小物体的重量,随称量位置的变化可能会有不同
的结果。已知地球质量为M,自转周期为T,万有引力常量为G。将地球视为半径为R、质
量均匀分布的球体,不考虑空气的影响。设在地球北极地面称量时,弹簧秤的读数是F
0
a. 若在北极上空高出地面h处称量,弹簧秤读数为F ,求比值F /F 的表达式,并就h=1.0%R
1 1 0
的情形算出具体数值(计算结果保留两位有效数字);
b. 若在赤道地面称量,弹簧秤读数为F ,求比值F /F 的表达式。
2 2 0
(2)设想地球绕太阳公转的圆周轨道半径为 r、太阳的半径为 R 和地球的半径R 三者均减
s
小为现在的 1.0%,而太阳和地球的密度均匀且不变。仅考虑太阳和地球之间的相互作用,
以现实地球的1年为标准,计算“设想地球”的一年将变为多长?
53.地下洞穴里的重力加速度
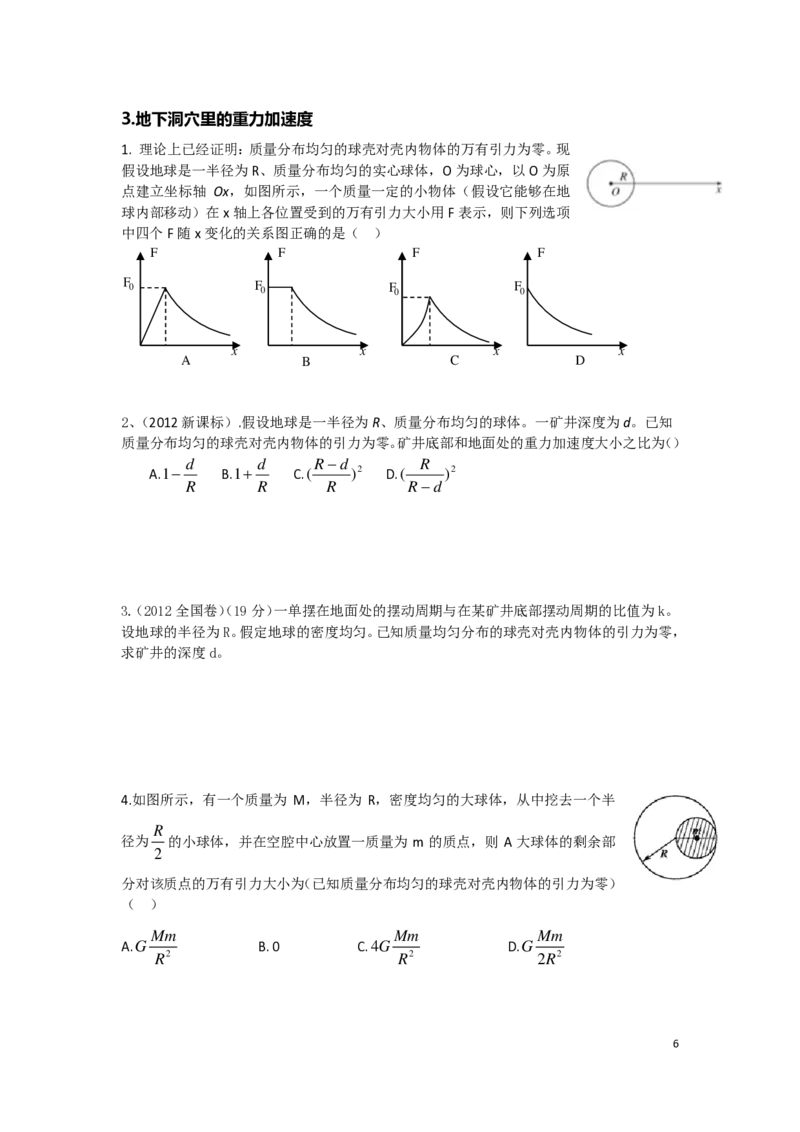
1. 理论上已经证明:质量分布均匀的球壳对壳内物体的万有引力为零。现
假设地球是一半径为R、质量分布均匀的实心球体,O为球心,以O为原
点建立坐标轴 Ox,如图所示,一个质量一定的小物体(假设它能够在地
球内部移动)在x轴上各位置受到的万有引力大小用F表示,则下列选项
中四个F随x变化的关系图正确的是( )
F F F F
F 0 F 0 F 0 F 0
x x x x
A B C D
2、(2012新课标).假设地球是一半径为R、质量分布均匀的球体。一矿井深度为d。已知
质量分布均匀的球壳对壳内物体的引力为零。矿井底部和地面处的重力加速度大小之比为()
d d R−d R
A.1− B.1+ C.( )2 D.( )2
R R R R−d
3.(2012全国卷)(19分)一单摆在地面处的摆动周期与在某矿井底部摆动周期的比值为k。
设地球的半径为R。假定地球的密度均匀。已知质量均匀分布的球壳对壳内物体的引力为零,
求矿井的深度d。
4.如图所示,有一个质量为 M,半径为 R,密度均匀的大球体,从中挖去一个半
R
径为 的小球体,并在空腔中心放置一质量为 m 的质点,则 A 大球体的剩余部
2
分对该质点的万有引力大小为(已知质量分布均匀的球壳对壳内物体的引力为零)
( )
Mm Mm Mm
A.G B. 0 C.4G D.G
R2 R2 2R2
6二. 圆轨道绕转的定性问题
1. 能用口诀
1.(2020天津)北斗问天,国之夙愿。我国北斗三号系统的收官之星是地球静止轨道卫星,其
轨道半径约为地球半径的7倍。与近地轨道卫星相比,地球静止轨道卫星( )
A. 周期大 B. 线速度大 C. 角速度大 D. 加速度大
2 .(2010天津)探测器绕月球做匀速圆周运动,变轨后在周期较小的轨道上仍做匀速圆周
运动,则变轨后与变轨前相比( )
A. 轨道半径变小 B. 向心加速度变小
C. 线速度变小 D. 角速度变小
3、(2014天津)研究表明,地球自转在逐渐变慢,3亿年前地球自转的周期约为22小时。
假设这种趋势会持续下去,地球的其他条件都不变,未来人类发射的地球同步卫星与现在的
相比( )
A、距地面的高度变大 B、向心加速度变大 C、线速度变大 D、角速度变大
4. (2020河西区二模)2019年12月16日,我国的西昌卫星发射中心又一次完美发射两颗北斗
卫星,标志着“北斗三号”全球系统核心星座部署完成,计划在6月发射最后一颗北斗卫星,
北斗系统即将全面建成。若北斗卫星运行时都绕地心做匀速圆周运动,北斗三号系统的最后
一颗卫星,是一颗地球静止轨道卫星,则
A. 线速度大的北斗卫星,运行周期大
( )
B. 北斗卫星的发射速度应大于
C. 北斗卫星的运行速度有可能大于
7.9km/s
D. 北斗三号系统的最后一颗卫星的轨道平面和赤道重合
7.9km/s
5. (2020南开中学5月考)2020年北京时间1月16日11点02分,
酒泉卫星发射中心一枚“快舟一号甲”火箭发射由银河航天研发
制造的5G低轨宽带卫星,也是全球首颗5G卫星,重量为227
公斤,在距离地面1156公里的区域运行,下列说法正确的是( )
A.5G卫星不受地球引力作用
B.5G卫星绕地飞行的速度一定大于7.9km/s
C.5G卫星轨道半径比地球同步卫星高
D.5G卫星在轨道上运行的速度大小与卫星的质量无关
76.“天舟一号”货运飞船于2017年4月20日在文昌航天发射中心成功发射升空。与“天宫
二号”空间实验室对接前,“天舟一号”在距地面约380 km的圆轨道上飞行,则其( )
A.角速度小于地球自转角速度
B.线速度小于第一宇宙速度
C.周期小于地球自转周期
D.向心加速度小于地面的重力加速度
7. 人造地球卫星在绕地球做圆周运动的过程中,下列说法正确的是( )
A.卫星离地球越远,角速度越大
B.同一圆轨道上运行的两颗卫星,线速度大小一定相同
C.一切卫星运行的瞬时速度都大于7.9km/s
D.地球同步卫星可以在以地心为圆心,离地高度为固定值的一切圆轨道上运动
8. 2016年9月15日22时04分,天宫二号在酒泉卫星发射中心被成功发射
到离地面393公里的轨道上;2019年10月17日23时21分,通信技术试
验卫星在西昌卫星发射中心成功发射升空,卫星顺利进入到地球同步轨道。
以下说法正确的是( )
A.通信技术试验卫星可以通过北京上空
B.通信技术试验卫星的运行速度大于7.9km/s
C.天宫二号运行周期比通信技术试验卫星短
D.天宫二号的运行速度比通信技术试验卫星小
9.冥王星的两颗卫星尼克斯(Nix)和海德拉(Hydra)绕冥王星近似做匀速圆周运动,它们
的周期分别约为25天和38天,则尼克斯绕冥王星的
A.角速度比海德拉的大
B.向心加速度比海德拉的小
C.线速度比海德拉的小
D.轨道半径比海德拉的大
10、(2019 和平 3 模)人造地球卫星以圆形轨道环绕地球飞行,卫星由于长期受微小阻力
作用而使得环绕轨道发生少许变化,卫星受到阻力作用后,下列说法正确的是( )
A.轨道高度降低 B.环绕速度减小
C.卫星机械能增加 D.卫星环绕周期不变
11、(2019河东区1模)2016年11月24日,我国成功发射了天
链一号04星,天链一号04星 是我国发射的第4颗地球同步卫星,
它与天链一号02星,03星实现组网运行,为我国神州飞船、空间
实验室天空二号提供数据中继与测控服务,如图所示,1是天空二
号绕地球稳定运行的轨道,2是天链一号稳定绕地球稳定运行的轨
道。下列说法正确的是( )
A.天链一号04星的最小发射速度是11.2km/s
B.天链一号04星的运行速度小于天空二号的运行速度
C.为了便于测控,天链一号04星相对于地面静止于北京飞控中心的正上方
D.由于技术进步,天链一号04星的运行速度可能大于天链一号02星的运行速度
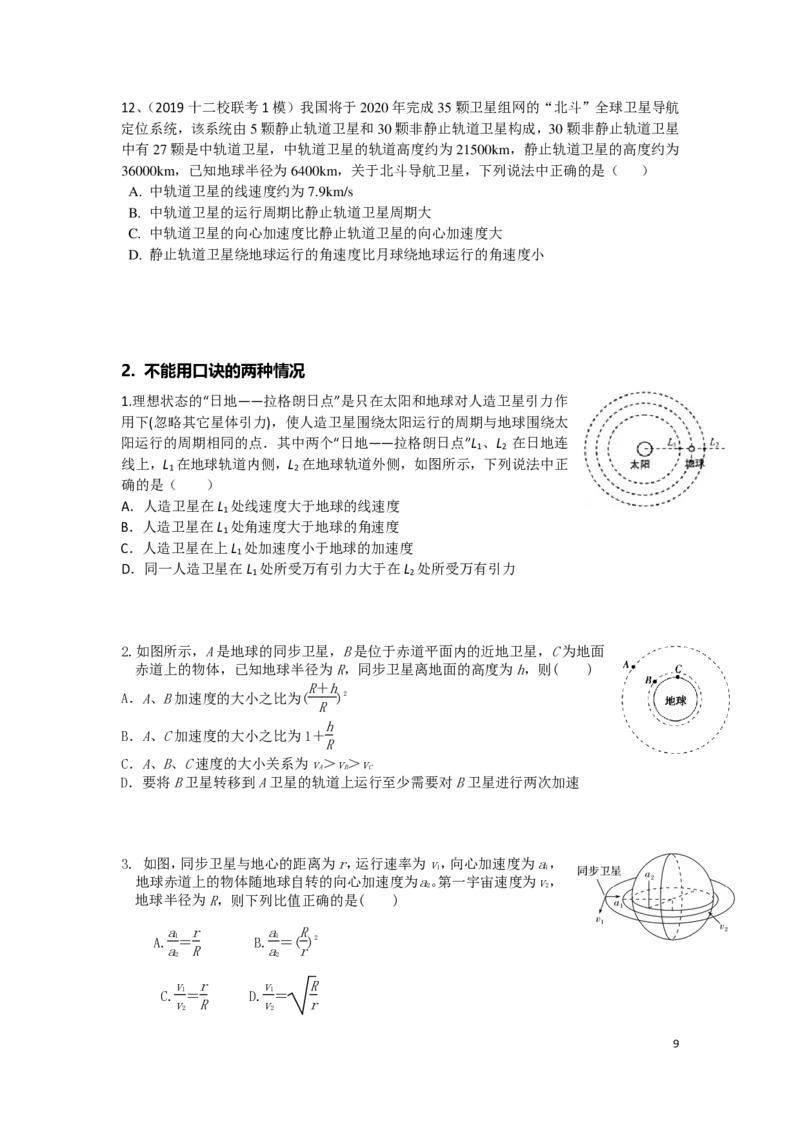
812、(2019十二校联考1模)我国将于2020年完成35颗卫星组网的“北斗”全球卫星导航
定位系统,该系统由5颗静止轨道卫星和30颗非静止轨道卫星构成,30颗非静止轨道卫星
中有27颗是中轨道卫星,中轨道卫星的轨道高度约为21500km,静止轨道卫星的高度约为
36000km,已知地球半径为6400km,关于北斗导航卫星,下列说法中正确的是( )
A. 中轨道卫星的线速度约为7.9km/s
B. 中轨道卫星的运行周期比静止轨道卫星周期大
C. 中轨道卫星的向心加速度比静止轨道卫星的向心加速度大
D. 静止轨道卫星绕地球运行的角速度比月球绕地球运行的角速度小
2. 不能用口诀的两种情况
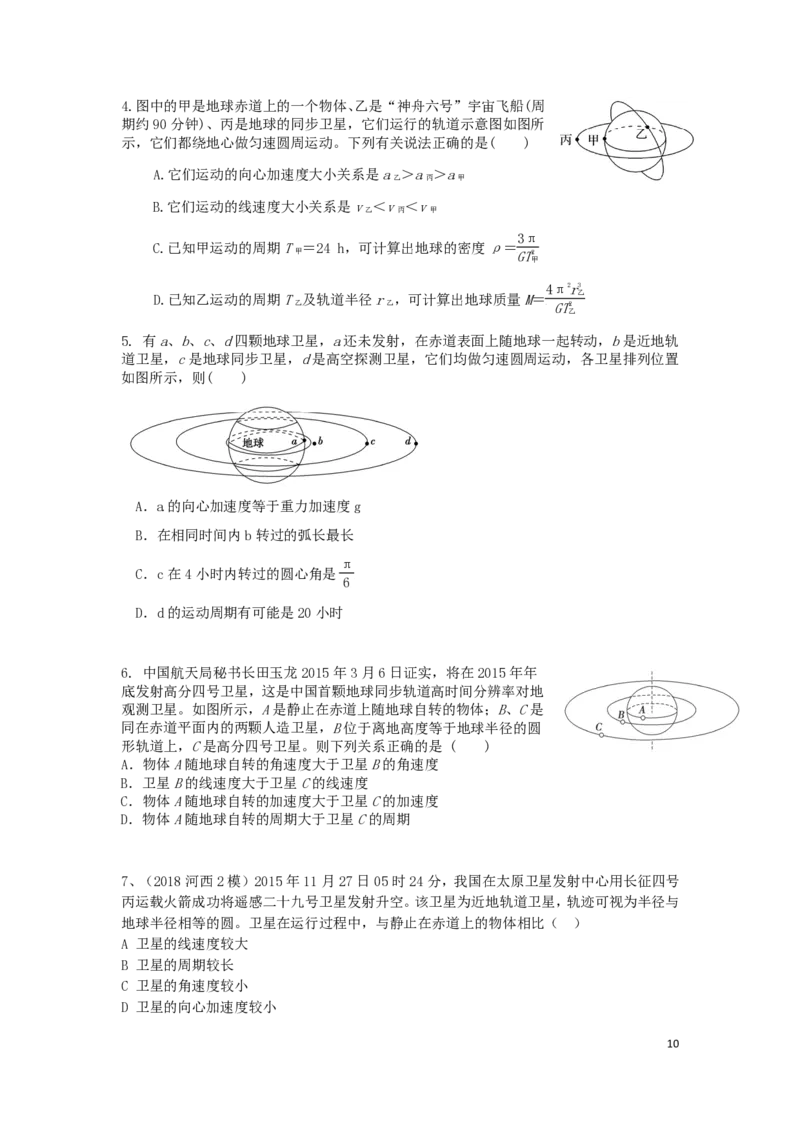
1.理想状态的“日地——拉格朗日点”是只在太阳和地球对人造卫星引力作
用下(忽略其它星体引力),使人造卫星围绕太阳运行的周期与地球围绕太
阳运行的周期相同的点.其中两个“日地——拉格朗日点”L 、L 在日地连
1 2
线上,L 在地球轨道内侧,L 在地球轨道外侧,如图所示,下列说法中正
1 2
确的是( )
A.人造卫星在L 处线速度大于地球的线速度
1
B.人造卫星在L 处角速度大于地球的角速度
1
C.人造卫星在上L 处加速度小于地球的加速度
1
D.同一人造卫星在L 处所受万有引力大于在L 处所受万有引力
1 2
2.如图所示,A是地球的同步卫星,B是位于赤道平面内的近地卫星,C为地面
赤道上的物体,已知地球半径为R,同步卫星离地面的高度为h,则( )
R+h
A.A、B加速度的大小之比为( )2
R A
E
h
B.A、C加速度的大小之比为1+
RA
E
C.A、B、C速度的大小关系为v>v>v
A B C
D.要将B卫星转移到A卫星的轨道上运行至少需要对B卫星进行两次加速
3. 如图,同步卫星与地心的距离为r,运行速率为v,向心加速度为a,
1 1
地球赤道上的物体随地球自转的向心加速度为a。第一宇宙速度为v,
2 2
地球半径为R,则下列比值正确的是( )
a r a R
A. 1= B. 1=( )2
aA 2A RA A aA 2A rA A
E E E E
v r v R
C. 1= D. 1=
vA 2A RA A vA 2A A rE
E E E
94.图中的甲是地球赤道上的一个物体、乙是“神舟六号”宇宙飞船(周
期约90分钟)、丙是地球的同步卫星,它们运行的轨道示意图如图所
示,它们都绕地心做匀速圆周运动。下列有关说法正确的是( )
A.它们运动的向心加速度大小关系是a >a >a
乙 丙 甲
B.它们运动的线速度大小关系是v <v <v
乙 丙 甲
3π
C.已知甲运动的周期T =24 h,可计算出地球的密度ρ=
甲 GAAEA T2
甲
E
4π2r3
D.已知乙运动的周期T 及轨道半径r ,可计算出地球质量M= 乙
乙 乙
AAEAAEA
GT2
乙
E E
5. 有a、b、c、d四颗地球卫星,a还未发射,在赤道表面上随地球一起转动,b是近地轨
道卫星,c是地球同步卫星,d是高空探测卫星,它们均做匀速圆周运动,各卫星排列位置
如图所示,则( )
A.a的向心加速度等于重力加速度g
B.在相同时间内b转过的弧长最长
π
C.c在4小时内转过的圆心角是
A6A
E
D.d的运动周期有可能是20小时
6. 中国航天局秘书长田玉龙2015年3月6日证实,将在2015年年
底发射高分四号卫星,这是中国首颗地球同步轨道高时间分辨率对地
观测卫星。如图所示,A是静止在赤道上随地球自转的物体;B、C是
同在赤道平面内的两颗人造卫星,B位于离地高度等于地球半径的圆
形轨道上,C是高分四号卫星。则下列关系正确的是 ( )
A.物体A随地球自转的角速度大于卫星B的角速度
B.卫星B的线速度大于卫星C的线速度
C.物体A随地球自转的加速度大于卫星C的加速度
D.物体A随地球自转的周期大于卫星C的周期
7、(2018河西2模)2015年11月27日05时24分,我国在太原卫星发射中心用长征四号
丙运载火箭成功将遥感二十九号卫星发射升空。该卫星为近地轨道卫星,轨迹可视为半径与
地球半径相等的圆。卫星在运行过程中,与静止在赤道上的物体相比( )
A 卫星的线速度较大
B 卫星的周期较长
C 卫星的角速度较小
D 卫星的向心加速度较小
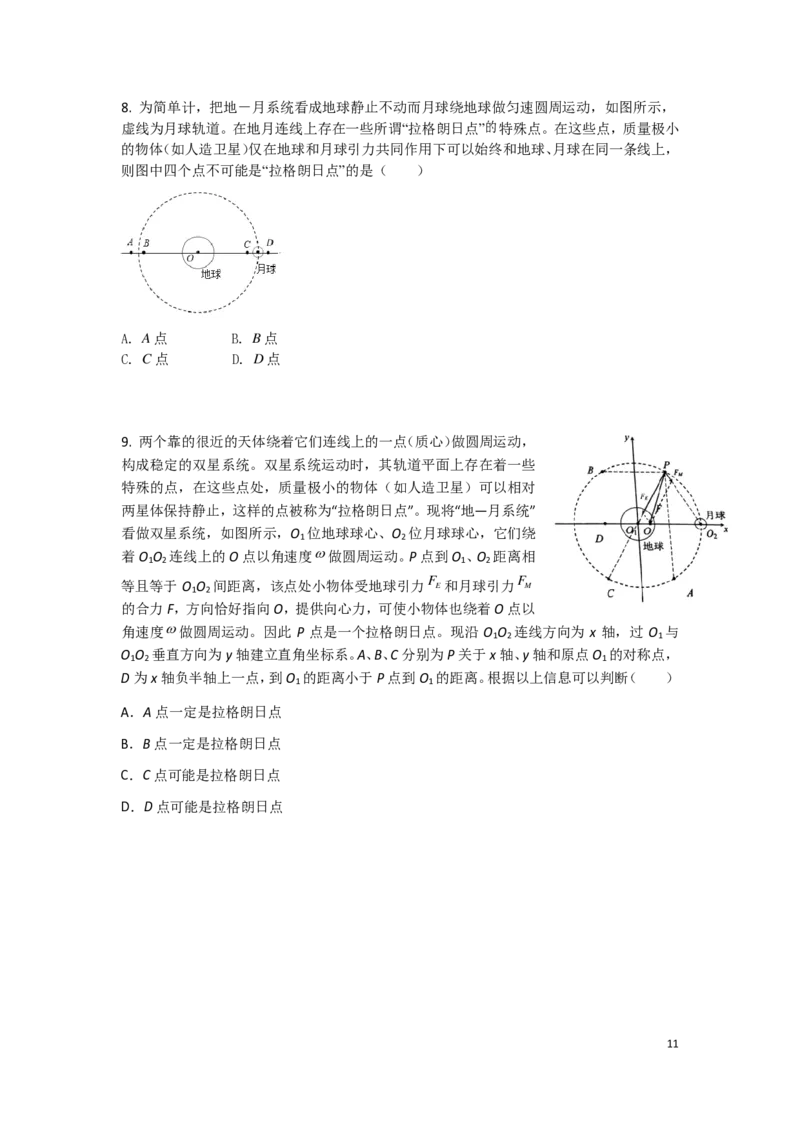
108. 为简单计,把地-月系统看成地球静止不动而月球绕地球做匀速圆周运动,如图所示,
虚线为月球轨道。在地月连线上存在一些所谓“拉格朗日点”的特殊点。在这些点,质量极小
的物体(如人造卫星)仅在地球和月球引力共同作用下可以始终和地球、月球在同一条线上,
则图中四个点不可能是“拉格朗日点”的是( )
A. A点 B. B点
C. C点 D. D点
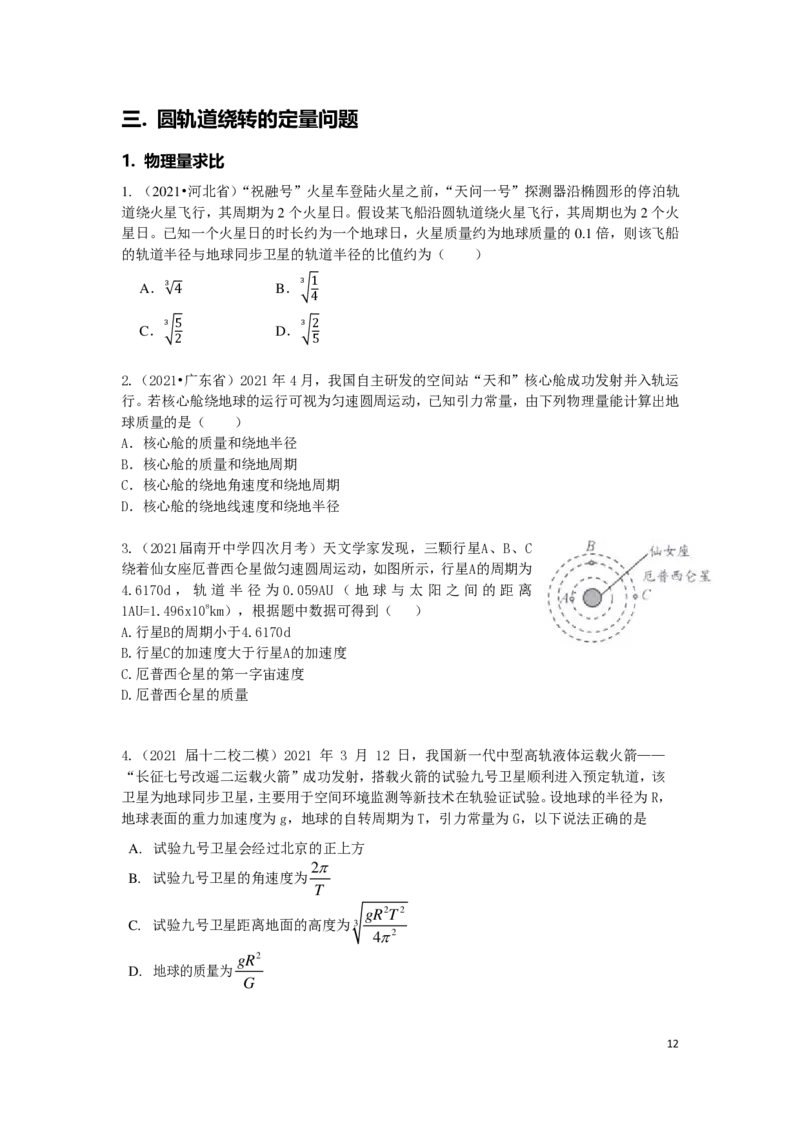
9. 两个靠的很近的天体绕着它们连线上的一点(质心)做圆周运动,
构成稳定的双星系统。双星系统运动时,其轨道平面上存在着一些
特殊的点,在这些点处,质量极小的物体(如人造卫星)可以相对
两星体保持静止,这样的点被称为“拉格朗日点”。现将“地—月系统”
看做双星系统,如图所示,O 位地球球心、O 位月球球心,它们绕
1 2
着O O 连线上的O点以角速度ω做圆周运动。P点到O 、O 距离相
1 2 1 2
等且等于 O 1 O 2 间距离,该点处小物体受地球引力F E和月球引力F M
的合力F,方向恰好指向O,提供向心力,可使小物体也绕着O点以
角速度ω做圆周运动。因此 P 点是一个拉格朗日点。现沿 O O 连线方向为 x 轴,过 O 与
1 2 1
O O 垂直方向为y轴建立直角坐标系。A、B、C分别为P关于x轴、y轴和原点O 的对称点,
1 2 1
D为x轴负半轴上一点,到O 的距离小于P点到O 的距离。根据以上信息可以判断( )
1 1
A.A点一定是拉格朗日点
B.B点一定是拉格朗日点
C.C点可能是拉格朗日点
D.D点可能是拉格朗日点
11三. 圆轨道绕转的定量问题
1. 物理量求比
1. (2021•河北省)“祝融号”火星车登陆火星之前,“天问一号”探测器沿椭圆形的停泊轨
道绕火星飞行,其周期为2个火星日。假设某飞船沿圆轨道绕火星飞行,其周期也为2个火
星日。已知一个火星日的时长约为一个地球日,火星质量约为地球质量的0.1倍,则该飞船
的轨道半径与地球同步卫星的轨道半径的比值约为( )
A. B.
3 3
1
√4 �
C. D. 4
3 3
5 2
� �
2 5
2.(2021•广东省)2021年4月,我国自主研发的空间站“天和”核心舱成功发射并入轨运
行。若核心舱绕地球的运行可视为匀速圆周运动,已知引力常量,由下列物理量能计算出地
球质量的是( )
A.核心舱的质量和绕地半径
B.核心舱的质量和绕地周期
C.核心舱的绕地角速度和绕地周期
D.核心舱的绕地线速度和绕地半径
3.(2021届南开中学四次月考)天文学家发现,三颗行星A、B、C
绕着仙女座厄普西仑星做匀速圆周运动,如图所示,行星A的周期为
4.6170d ,轨 道半径 为0.059AU (地 球与太 阳之 间的 距离
1AU=1.496x108km),根据题中数据可得到( )
A.行星B的周期小于4.6170d
B.行星C的加速度大于行星A的加速度
C.厄普西仑星的第一字宙速度
D.厄普西仑星的质量
4.(2021 届十二校二模)2021 年 3 月 12 日,我国新一代中型高轨液体运载火箭——
“长征七号改遥二运载火箭”成功发射,搭载火箭的试验九号卫星顺利进入预定轨道,该
卫星为地球同步卫星,主要用于空间环境监测等新技术在轨验证试验。设地球的半径为R,
地球表面的重力加速度为g,地球的自转周期为T,引力常量为G,以下说法正确的是
A. 试验九号卫星会经过北京的正上方
2π
B. 试验九号卫星的角速度为
T
gR2T2
C. 试验九号卫星距离地面的高度为3
4π2
gR2
D. 地球的质量为
G
125.(2021届十二校一模)2020年12月3日,嫦娥五号上升器携带月壤样品成功回到预定环月
轨道,这是我国首次实现地外天体起飞。“嫦娥五号”探测器绕月轨道可以近似为圆轨道,
已知“嫦娥五号”轨道半径为r,月球质量为M,月球半径为R,引力常量为G。下列说法正确
的是( )
GM GM
A.嫦娥五号的运行速度为v= B.月球的第一宇宙速度v =
R 0 r
r3 GM
C.嫦娥五号绕月的飞行周期T =2π D.月球表面的重力加速度为g =
GM r2
6.(2021届和平区二模)小明非常关注我国航天事业取得的新成就,他通过阅读有关资料了
解到:执行探测月球任务的嫦娥5号,在着陆在月球表面之前,要进入近月圆形轨道运行,
由此他利用已学过的知识推测:执行探测火星任务的天问一号,在着陆在火星表面之前,要
进入近火圆形轨道运行。他又通过网络查询到:火星质量约为月球质量的9倍,火星半径约
为月球半径的2倍,则根据该小明的推测和查到的数据可以做出下列分析( )
A.天问一号在椭圆轨道上需要通过加速才能进入近火轨道
B.嫦娥5号在近月轨道上的运行速度大于天问一号在近火轨道上的运行速度
C.嫦娥5号在近月轨道上的运行周期大于天问一号在近火轨道上的运行周期
D.嫦娥5号在近月轨道上的向心加速度大于天问一号在近火轨道上的向心加速度
7. (2021届和平区一模)“遂古之初,谁传道之?上下未形,何由考之?
"2021年3月4日,国家航天局发布了探测飞船“天问一号”在近火轨道拍
摄的高清火星影像图,预计2021年5月“天问一号”将完成落“火”的壮
举!如图所示,我们近似认为“天问一号”由远火圆周轨道A变轨后进入
近火圆周轨道B,用r,T、a、E、F分别表示“天问一号”的轨道半径、
k
周期、向心加速度、动能和所受的万有引力,则探测器在A、B两个轨道
上( )
F r a r E r T r
A. A = R B. A = A C. KA = B D. A = A
F r a r E r T r
R A B B KB A B B
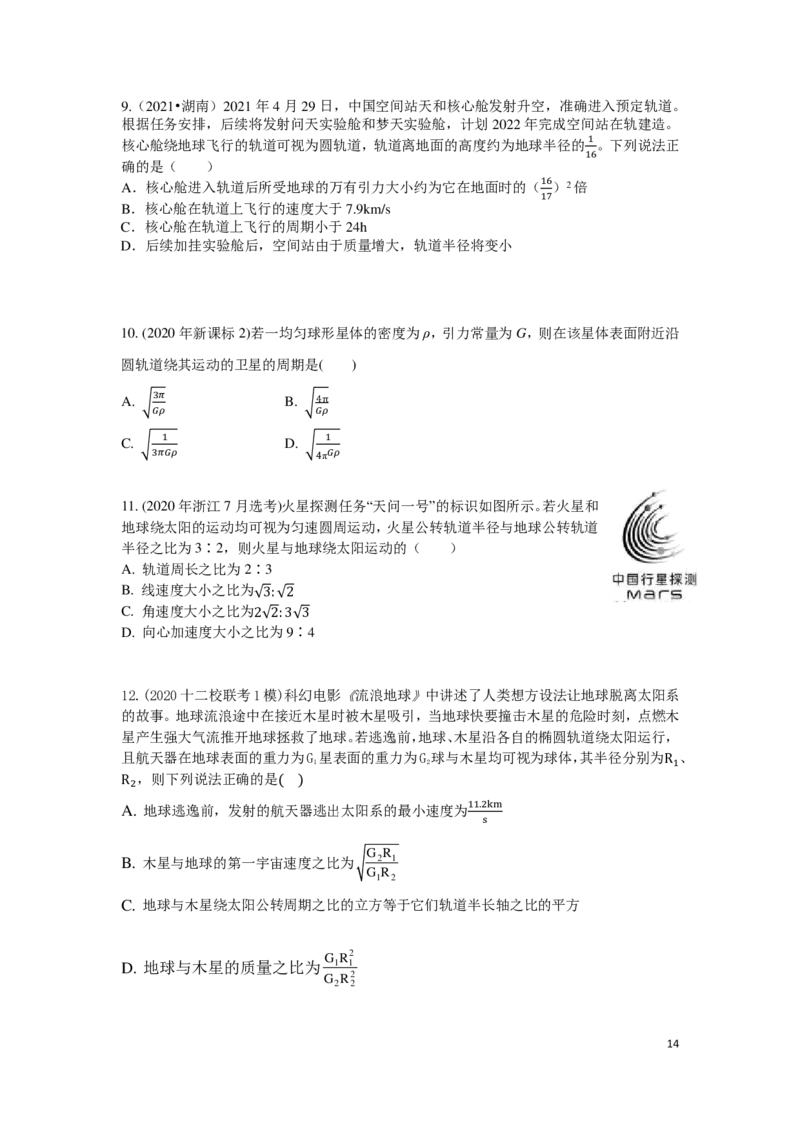
8.(2021•6月浙江)空间站在地球外层的稀薄大气中绕行,因气体阻
力的影响,轨道高度会发生变化。空间站安装有发动机,可对轨道进
行修正。图中给出了国际空间站在2020.02﹣2020.08期间离地高度随
时间变化的曲线,则空间站( )
A.绕地运行速度约为2.0km/s
B.绕地运行速度约为8.0km/s
C.在4月份绕行的任意两小时内机械能可视为守恒
D.在5月份绕行的任意两小时内机械能可视为守恒
139.(2021•湖南)2021年4月29日,中国空间站天和核心舱发射升空,准确进入预定轨道。
根据任务安排,后续将发射问天实验舱和梦天实验舱,计划2022年完成空间站在轨建造。
核心舱绕地球飞行的轨道可视为圆轨道,轨道离地面的高度约为地球半径的 。下列说法正
确的是( ) 1
16
A.核心舱进入轨道后所受地球的万有引力大小约为它在地面时的( )2倍
B.核心舱在轨道上飞行的速度大于7.9km/s 16
17
C.核心舱在轨道上飞行的周期小于24h
D.后续加挂实验舱后,空间站由于质量增大,轨道半径将变小
10. (2020年新课标2)若一均匀球形星体的密度为ρ,引力常量为G,则在该星体表面附近沿
圆轨道绕其运动的卫星的周期是( )
A. B.
3𝜋𝜋 4π
�𝐺𝐺𝐺𝐺 �𝐺𝐺𝐺𝐺
C. D.
1 π1
�3𝜋𝜋𝐺𝐺𝐺𝐺 � 4 𝐺𝐺𝐺𝐺
11. (2020年浙江7月选考)火星探测任务“天问一号”的标识如图所示。若火星和
地球绕太阳的运动均可视为匀速圆周运动,火星公转轨道半径与地球公转轨道
半径之比为3∶2,则火星与地球绕太阳运动的( )
A. 轨道周长之比为2∶3
B. 线速度大小之比为
C. 角速度大小之比为
√3:√2
D. 向心加速度大小之比为9∶4
2√2:3√3
12.(2020十二校联考1模)科幻电影《流浪地球》中讲述了人类想方设法让地球脱离太阳系
的故事。地球流浪途中在接近木星时被木星吸引,当地球快要撞击木星的危险时刻,点燃木
星产生强大气流推开地球拯救了地球。若逃逸前,地球、木星沿各自的椭圆轨道绕太阳运行,
且航天器在地球表面的重力为G 星表面的重力为G 球与木星均可视为球体,其半径分别为 、
1 2
,则下列说法正确的是
R1
RA2. 地球逃逸前,发射的航( 天 )器逃出太阳系的最小速度为
11.2km
s
G R
B. 木星与地球的第一宇宙速度之比为 2 1
G R
1 2
C. 地球与木星绕太阳公转周期之比的立方等于它们轨道半长轴之比的平方
G R2
D. 地球与木星的质量之比为 1 1
G R2
2 2
1413. (2020届南开区1模) 据报道,2020年前我国将发射8颗海洋系列卫星,包括2颗海洋
动力环境卫星和2颗海陆雷达卫星(这4颗卫星均绕地球做匀速圆周运动),以加强对黄岩岛、
钓鱼岛及西沙群岛全部岛屿附近海域的监测。设海陆雷达卫星的轨道半径是海洋动力环境卫
星的n倍,下列说法正确的是( )
A.在相同时间内,海陆雷达卫星到地心的连线扫过的面积与海洋动力环境卫星到地心的连线
扫过的面积相等
B.海陆雷达卫星做匀速圆周运动的半径的三次方与周期的平方之比等于海洋动力环境卫星
做匀速圆周运动的半径的三次方与周期的平方之比
3
C.海陆雷达卫星与海洋动力环境卫星角速度之比为n2:1
D.海陆雷达卫星与海洋动力环境卫星向心加速度之比为n2:1
14.(2020届天津市南开区高三上学期期末考试)习近平主席在2018年新年贺词中提到,
科技创新、重大工程建设捷报频传,“慧眼”卫星邀游太空.“慧眼”于2017年6月15日在酒
泉卫星发射中心成功发射,在10月16日的观测中,确定了γ射线的流量上限.已知“慧眼”
卫星绕地球做匀速圆周运动,其轨道半径为r,运动周期为T,地球半径为R,引力常量为G,
地球表面处的重力加速度为g,则下列说法正确的是( )
3π
A.地球的平均密度大小为
GT2
gr2
B.地球的质量大小为
G
4π2R
C.地球表面的重力加速度大小
T2
4π2r
D.“慧眼”卫星的向心加速度大小为
T2
15.金星和地球在同一平面内绕太阳公转,且公转轨道均视为圆形,如图所示,在地球上观
测,发现金星与太阳可呈现的视角(太阳与金星均视为质点,它们与眼睛连线的夹角)有最
大值,最大视角的正弦值为n,则金星的公转周期为( )
A. (1-n2)3/2年 B. (1-n2)3/4.年 C. n3年 D. 年
3
√n
152. 圆周追及
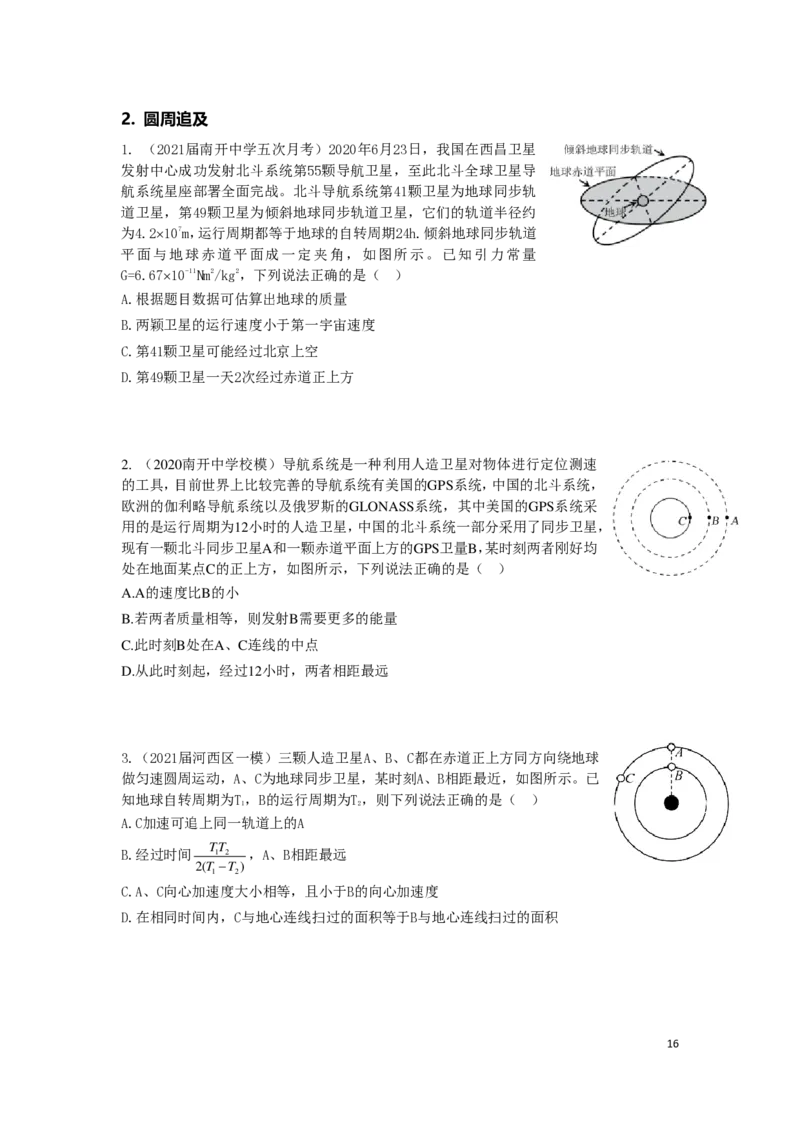
1. (2021届南开中学五次月考)2020年6月23日,我国在西昌卫星
发射中心成功发射北斗系统第55颗导航卫星,至此北斗全球卫星导
航系统星座部署全面完战。北斗导航系统第41颗卫星为地球同步轨
道卫星,第49颗卫星为倾斜地球同步轨道卫星,它们的轨道半径约
为4.2×107m,运行周期都等于地球的自转周期24h.倾斜地球同步轨道
平面与地球赤道平面成一定夹角,如图所示。已知引力常量
G=6.67×10-11Nm2/kg2,下列说法正确的是( )
A.根据题目数据可估算出地球的质量
B.两颖卫星的运行速度小于第一宇宙速度
C.第41颗卫星可能经过北京上空
D.第49颗卫星一天2次经过赤道正上方
2. (2020南开中学校模)导航系统是一种利用人造卫星对物体进行定位测速
的工具,目前世界上比较完善的导航系统有美国的GPS系统,中国的北斗系统,
欧洲的伽利略导航系统以及俄罗斯的GLONASS系统,其中美国的GPS系统采
用的是运行周期为12小时的人造卫星,中国的北斗系统一部分采用了同步卫星,
现有一颗北斗同步卫星A和一颗赤道平面上方的GPS卫量B,某时刻两者刚好均
处在地面某点C的正上方,如图所示,下列说法正确的是( )
A.A的速度比B的小
B.若两者质量相等,则发射B需要更多的能量
C.此时刻B处在A、C连线的中点
D.从此时刻起,经过12小时,两者相距最远
3.(2021届河西区一模)三颗人造卫星A、B、C都在赤道正上方同方向绕地球
做匀速圆周运动,A、C为地球同步卫星,某时刻A、B相距最近,如图所示。已
知地球自转周期为T,B的运行周期为T,则下列说法正确的是( )
1 2
A.C加速可追上同一轨道上的A
TT
B.经过时间 1 2 ,A、B相距最远
2(T −T )
1 2
C.A、C向心加速度大小相等,且小于B的向心加速度
D.在相同时间内,C与地心连线扫过的面积等于B与地心连线扫过的面积
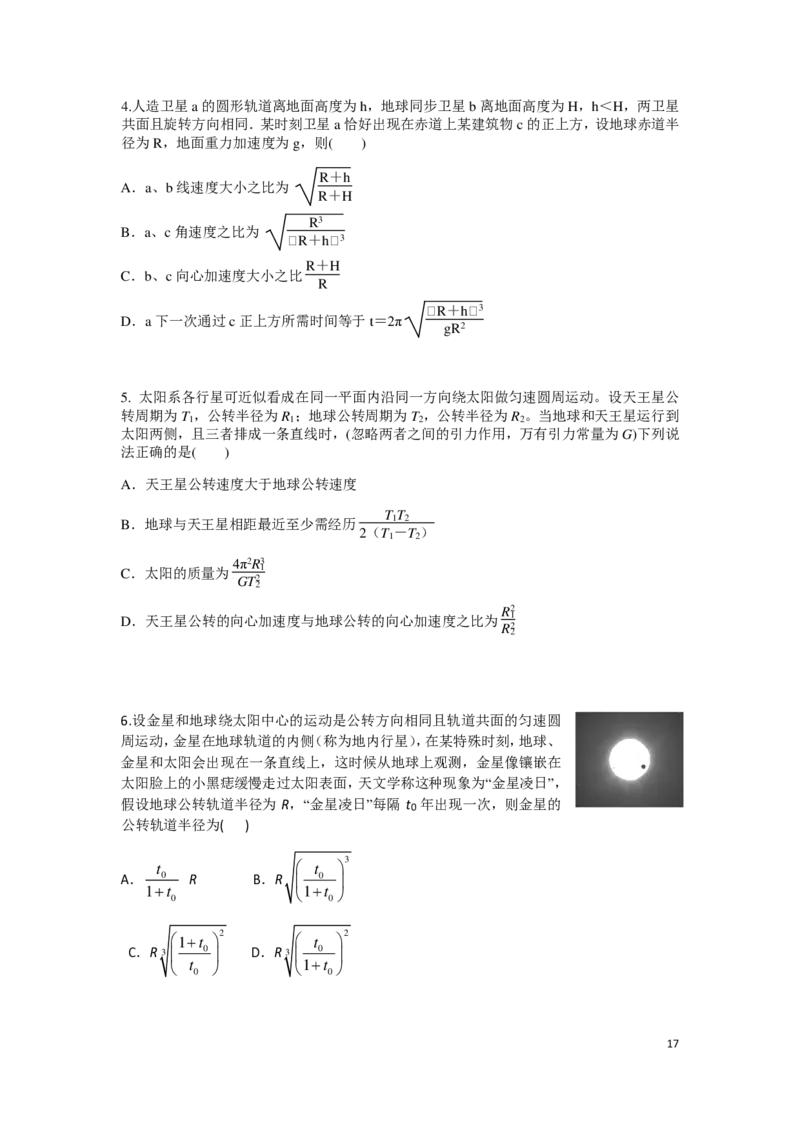
164.人造卫星a的圆形轨道离地面高度为h,地球同步卫星b离地面高度为H,h<H,两卫星
共面且旋转方向相同.某时刻卫星a恰好出现在赤道上某建筑物c的正上方,设地球赤道半
径为R,地面重力加速度为g,则( )
R+h
A.a、b线速度大小之比为
R+HAE
R3
B.a、c角速度之比为
A R+h3E
R+H
C.b、c向心加速度大小之比
A R
E
R+h3
D.a下一次通过c正上方所需时间等于t=2π
A gR2 E
5. 太阳系各行星可近似看成在同一平面内沿同一方向绕太阳做匀速圆周运动。设天王星公
转周期为T ,公转半径为R ;地球公转周期为T ,公转半径为R 。当地球和天王星运行到
1 1 2 2
太阳两侧,且三者排成一条直线时,(忽略两者之间的引力作用,万有引力常量为G)下列说
法正确的是( )
A.天王星公转速度大于地球公转速度
T T
B.地球与天王星相距最近至少需经历 1 2
A2(T -T )
1 2 E
4π2R3
C.太阳的质量为 1
AAEAAEA E GT2 2E
R2
D.天王星公转的向心加速度与地球公转的向心加速度之比为 1
AAEAAEA E R2 2E
6.设金星和地球绕太阳中心的运动是公转方向相同且轨道共面的匀速圆
周运动,金星在地球轨道的内侧(称为地内行星),在某特殊时刻,地球、
金星和太阳会出现在一条直线上,这时候从地球上观测,金星像镶嵌在
太阳脸上的小黑痣缓慢走过太阳表面,天文学称这种现象为“金星凌日”,
假设地球公转轨道半径为 R,“金星凌日”每隔 t
0
年出现一次,则金星的
公转轨道半径为( )
3
t t
A. 0 R B.R 0
1+t 1+t
0 0
2 2
1+t t
C.R3 0 D.R3 0
t 1+t
0 0
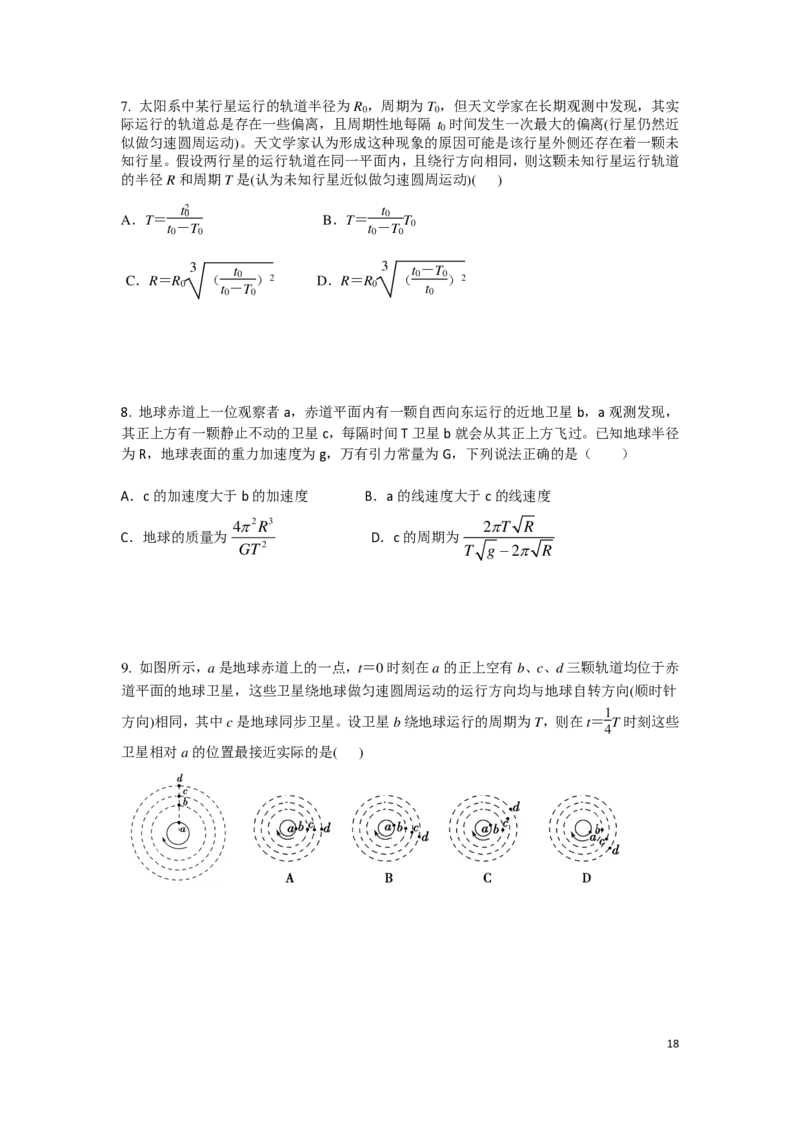
177. 太阳系中某行星运行的轨道半径为R ,周期为T ,但天文学家在长期观测中发现,其实
0 0
际运行的轨道总是存在一些偏离,且周期性地每隔 t 时间发生一次最大的偏离(行星仍然近
0
似做匀速圆周运动)。天文学家认为形成这种现象的原因可能是该行星外侧还存在着一颗未
知行星。假设两行星的运行轨道在同一平面内,且绕行方向相同,则这颗未知行星运行轨道
的半径R和周期T是(认为未知行星近似做匀速圆周运动)( )
t2 t
A.T= 0 B.T= 0 T
AAEAt -T A At -T A 0
E0 0E 0 0E
C.R=R 3 ( t 0 )2 D.R=R 3 ( t 0 -T 0)2
0A t 0 -T 0 AE 0A t 0 E
8. 地球赤道上一位观察者a,赤道平面内有一颗自西向东运行的近地卫星b,a观测发现,
其正上方有一颗静止不动的卫星c,每隔时间T卫星b就会从其正上方飞过。已知地球半径
为R,地球表面的重力加速度为g,万有引力常量为G,下列说法正确的是( )
A.c的加速度大于b的加速度 B.a的线速度大于c的线速度
4π2R3 2πT R
C.地球的质量为 D.c的周期为
GT2 T g −2π R
9. 如图所示,a是地球赤道上的一点,t=0时刻在a的正上空有b、c、d三颗轨道均位于赤
道平面的地球卫星,这些卫星绕地球做匀速圆周运动的运行方向均与地球自转方向(顺时针
1
方向)相同,其中c是地球同步卫星。设卫星b绕地球运行的周期为T,则在t= T时刻这些
A4A
E
卫星相对a的位置最接近实际的是( )
18四. 椭圆与变轨
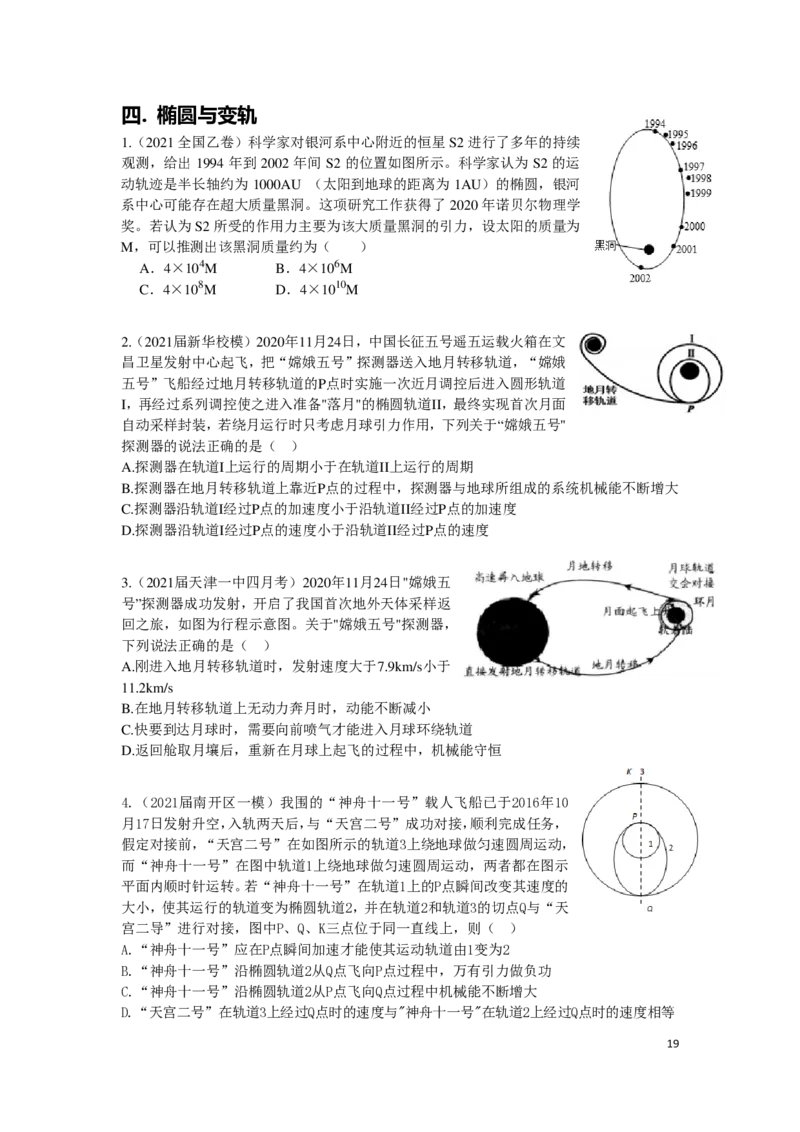
1.(2021全国乙卷)科学家对银河系中心附近的恒星S2进行了多年的持续
观测,给出 1994 年到 2002 年间 S2 的位置如图所示。科学家认为S2 的运
动轨迹是半长轴约为 1000AU (太阳到地球的距离为 1AU)的椭圆,银河
系中心可能存在超大质量黑洞。这项研究工作获得了2020年诺贝尔物理学
奖。若认为S2所受的作用力主要为该大质量黑洞的引力,设太阳的质量为
M,可以推测出该黑洞质量约为( )
A.4×104M B.4×106M
C.4×108M D.4×1010M
2.(2021届新华校模)2020年11月24日,中国长征五号遥五运载火箱在文
昌卫星发射中心起飞,把“嫦娥五号”探测器送入地月转移轨道,“嫦娥
五号”飞船经过地月转移轨道的P点时实施一次近月调控后进入圆形轨道
I,再经过系列调控使之进入准备"落月"的椭圆轨道II,最终实现首次月面
自动采样封装,若绕月运行时只考虑月球引力作用,下列关于“嫦娥五号"
探测器的说法正确的是( )
A.探测器在轨道I上运行的周期小于在轨道II上运行的周期
B.探测器在地月转移轨道上靠近P点的过程中,探测器与地球所组成的系统机械能不断增大
C.探测器沿轨道I经过P点的加速度小于沿轨道II经过P点的加速度
D.探测器沿轨道I经过P点的速度小于沿轨道II经过P点的速度
3.(2021届天津一中四月考)2020年11月24日"嫦娥五
号”探测器成功发射,开启了我国首次地外天体采样返
回之旅,如图为行程示意图。关于"嫦娥五号"探测器,
下列说法正确的是( )
A.刚进入地月转移轨道时,发射速度大于7.9km/s小于
11.2km/s
B.在地月转移轨道上无动力奔月时,动能不断减小
C.快要到达月球时,需要向前喷气才能进入月球环绕轨道
D.返回舱取月壤后,重新在月球上起飞的过程中,机械能守恒
4.(2021届南开区一模)我围的“神舟十一号”载人飞船已于2016年10
月17日发射升空,入轨两天后,与“天宫二号”成功对接,顺利完成任务,
假定对接前,“天宫二号”在如图所示的轨道3上绕地球做匀速圆周运动,
而“神舟十一号”在图中轨道1上绕地球做匀速圆周运动,两者都在图示
平面内顺时针运转。若“神舟十一号”在轨道1上的P点瞬间改变其速度的
大小,使其运行的轨道变为椭圆轨道2,并在轨道2和轨道3的切点Q与“天
宫二导”进行对接,图中P、Q、K三点位于同一直线上,则( )
A.“神舟十一号”应在P点瞬间加速才能使其运动轨道由1变为2
B.“神舟十一号”沿椭圆轨道2从Q点飞向P点过程中,万有引力做负功
C.“神舟十一号”沿椭圆轨道2从P点飞向Q点过程中机械能不断增大
D.“天宫二号”在轨道3上经过Q点时的速度与"神舟十一号"在轨道2上经过Q点时的速度相等
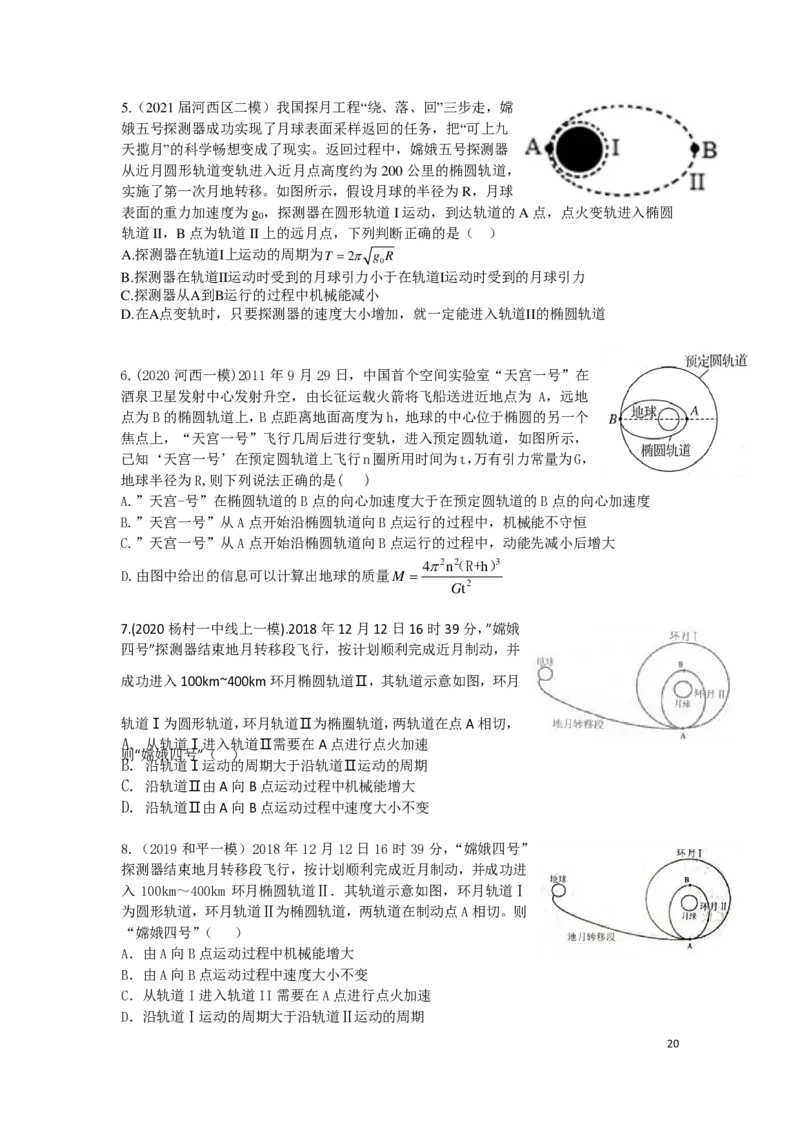
195.(2021届河西区二模)我国探月工程“绕、落、回”三步走,嫦
娥五号探测器成功实现了月球表面采样返回的任务,把“可上九
天揽月”的科学畅想变成了现实。返回过程中,嫦娥五号探测器
从近月圆形轨道变轨进入近月点高度约为200公里的椭圆轨道,
实施了第一次月地转移。如图所示,假设月球的半径为R,月球
表面的重力加速度为g ,探测器在圆形轨道I运动,到达轨道的A点,点火变轨进入椭圆
0
轨道II,B点为轨道II上的远月点,下列判断正确的是( )
A.探测器在轨道I上运动的周期为T =2π g R
0
B.探测器在轨道II运动时受到的月球引力小于在轨道I运动时受到的月球引力
C.探测器从A到B运行的过程中机械能减小
D.在A点变轨时,只要探测器的速度大小增加,就一定能进入轨道II的椭圆轨道
6.(2020河西一模)2011年9月29日,中国首个空间实验室“天宫一号”在
酒泉卫星发射中心发射升空,由长征运载火箭将飞船送进近地点为 A,远地
点为B的椭圆轨道上,B点距离地面高度为h,地球的中心位于椭圆的另一个
焦点上,“天宫一号”飞行几周后进行变轨,进入预定圆轨道,如图所示,
已知‘天宫一号’在预定圆轨道上飞行n圈所用时间为t,万有引力常量为G,
地球半径为R,则下列说法正确的是( )
A.”天宫-号”在椭圆轨道的B点的向心加速度大于在预定圆轨道的B点的向心加速度
B.”天宫一号”从A点开始沿椭圆轨道向B点运行的过程中,机械能不守恒
C.”天宫一号”从A点开始沿椭圆轨道向B点运行的过程中,动能先减小后增大
4π2n(2 R+h)3
D.由图中给出的信息可以计算出地球的质量M =
Gt2
7.(2020杨村一中线上一模).2018年12月12日16时39分,”嫦娥
四号”探测器结束地月转移段飞行,按计划顺利完成近月制动,并
成功进入100km~400km环月椭圆轨道Ⅱ,其轨道示意如图,环月
轨道Ⅰ为圆形轨道,环月轨道Ⅱ为椭圈轨道,两轨道在点A相切,
A. 从轨道Ⅰ进入轨道Ⅱ需要在A点进行点火加速
则“嫦娥四号”( )
B. 沿轨道Ⅰ运动的周期大于沿轨道Ⅱ运动的周期
C. 沿轨道Ⅱ由A向B点运动过程中机械能增大
D. 沿轨道Ⅱ由A向B点运动过程中速度大小不变
8.(2019和平一模)2018年12月12日16时39分,“嫦娥四号”
探测器结束地月转移段飞行,按计划顺利完成近月制动,并成功进
入 100km~400km 环月椭圆轨道Ⅱ.其轨道示意如图,环月轨道Ⅰ
为圆形轨道,环月轨道Ⅱ为椭圆轨道,两轨道在制动点A相切。则
“嫦娥四号”( )
A.由A向B点运动过程中机械能增大
B.由A向B点运动过程中速度大小不变
C.从轨道I进入轨道II需要在A点进行点火加速
D.沿轨道Ⅰ运动的周期大于沿轨道Ⅱ运动的周期
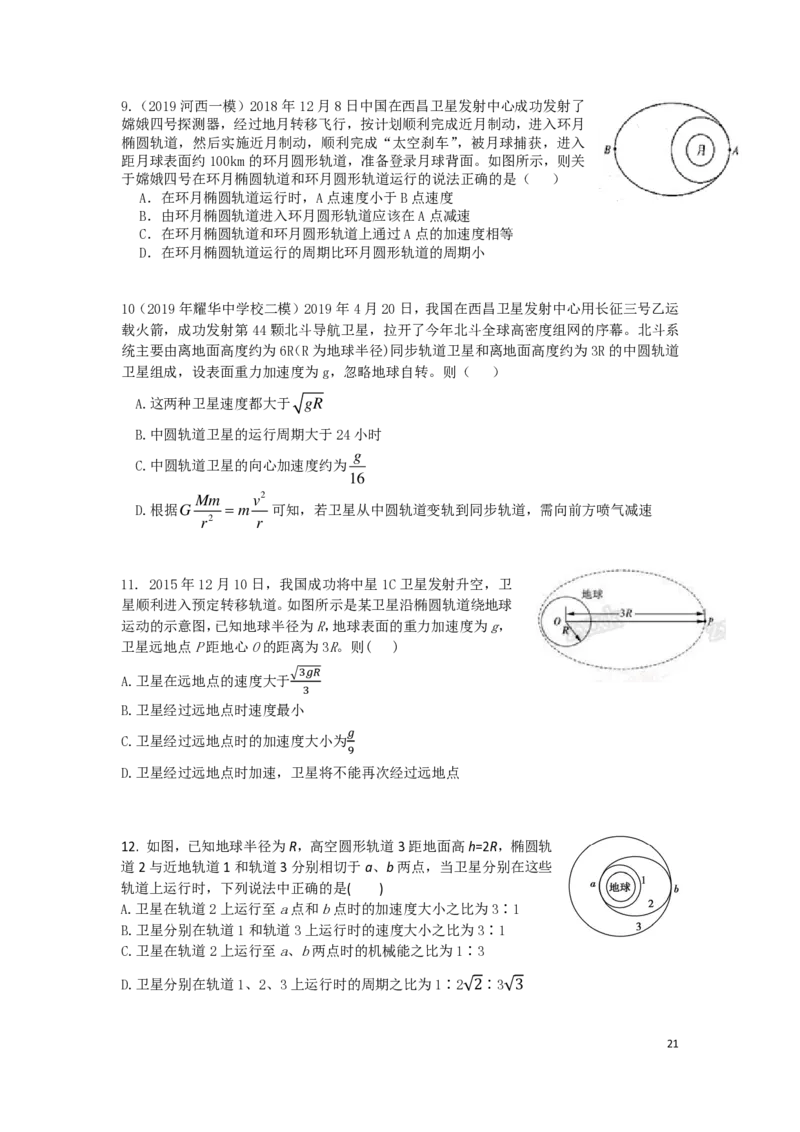
209.(2019河西一模)2018年12月8日中国在西昌卫星发射中心成功发射了
嫦娥四号探测器,经过地月转移飞行,按计划顺利完成近月制动,进入环月
椭圆轨道,然后实施近月制动,顺利完成“太空刹车”,被月球捕获,进入
距月球表面约100km的环月圆形轨道,准备登录月球背面。如图所示,则关
于嫦娥四号在环月椭圆轨道和环月圆形轨道运行的说法正确的是( )
A.在环月椭圆轨道运行时,A点速度小于B点速度
B.由环月椭圆轨道进入环月圆形轨道应该在A点减速
C.在环月椭圆轨道和环月圆形轨道上通过A点的加速度相等
D.在环月椭圆轨道运行的周期比环月圆形轨道的周期小
10(2019年耀华中学校二模)2019年4月20日,我国在西昌卫星发射中心用长征三号乙运
载火箭,成功发射第44颗北斗导航卫星,拉开了今年北斗全球高密度组网的序幕。北斗系
统主要由离地面高度约为6R(R为地球半径)同步轨道卫星和离地面高度约为3R的中圆轨道
卫星组成,设表面重力加速度为g,忽略地球自转。则( )
A.这两种卫星速度都大于 gR
B.中圆轨道卫星的运行周期大于24小时
g
C.中圆轨道卫星的向心加速度约为
16
Mm v2
D.根据G =m 可知,若卫星从中圆轨道变轨到同步轨道,需向前方喷气减速
r2 r
11. 2015年12月10日,我国成功将中星1C卫星发射升空,卫
星顺利进入预定转移轨道。如图所示是某卫星沿椭圆轨道绕地球
运动的示意图,已知地球半径为R,地球表面的重力加速度为g,
卫星远地点P距地心O的距离为3R。则( )
A.卫星在远地点的速度大于
�3𝑅𝑅𝑅𝑅
B.卫星经过远地点时速度最小
3
C.卫星经过远地点时的加速度大小为
𝑅𝑅
D.卫星经过远地点时加速,卫星将不能再次经过远地点
9
12. 如图,已知地球半径为R,高空圆形轨道3距地面高h=2R,椭圆轨
道2与近地轨道1和轨道3分别相切于a、b两点,当卫星分别在这些
轨道上运行时,下列说法中正确的是( )
A.卫星在轨道2上运行至a点和b点时的加速度大小之比为3∶1
B.卫星分别在轨道1和轨道3上运行时的速度大小之比为3∶1
C.卫星在轨道2上运行至a、b两点时的机械能之比为1∶3
D.卫星分别在轨道1、2、3上运行时的周期之比为1∶2 ∶3
√2 √3
2113.根据前人研究的成果,火星和地球沿着各自的椭圆轨道绕太阳运行,根据开普勒行星运
动定律以及能量方面的相关知识可以判定下属选项正确的是:(已知行星引力势能的表达式
GMm
为E =− ,其中M和m分别为太阳和行星的质量,r为太阳和行星之间的距离),
P
r
A.太阳位于火星运行轨道的中心
B.当它们由各自的近日点运动到远日点时,它们(与太阳组成的系统)的引力势能都要增大。
C.当它们由各自的近日点运动到远日点时,动能都要减小,所以它们(与太阳组成的系统)
的机械能也要减小。
D.如果采用理想化模型法将两个行星的运动轨迹看成正圆的话,它们运行时各自的向心加速
度一定相同
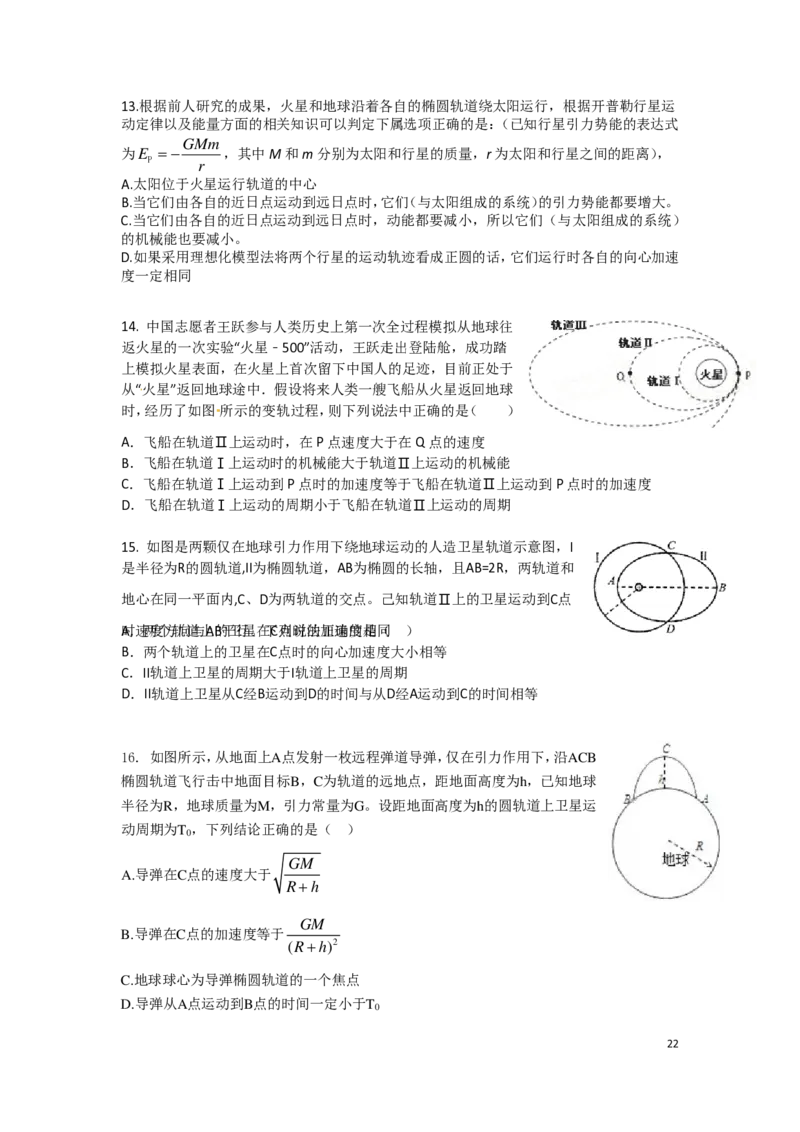
14. 中国志愿者王跃参与人类历史上第一次全过程模拟从地球往
返火星的一次实验“火星﹣500”活动,王跃走出登陆舱,成功踏
上模拟火星表面,在火星上首次留下中国人的足迹,目前正处于
从“火星”返回地球途中.假设将来人类一艘飞船从火星返回地球
时,经历了如图 所示的变轨过程,则下列说法中正确的是( )
A.飞船在轨道Ⅱ上运动时,在P点速度大于在Q点的速度
B.飞船在轨道Ⅰ上运动时的机械能大于轨道Ⅱ上运动的机械能
C.飞船在轨道Ⅰ上运动到P点时的加速度等于飞船在轨道Ⅱ上运动到P点时的加速度
D.飞船在轨道Ⅰ上运动的周期小于飞船在轨道Ⅱ上运动的周期
15. 如图是两颗仅在地球引力作用下绕地球运动的人造卫星轨道示意图,I
是半径为R的圆轨道,II为椭圆轨道,AB为椭圆的长轴,且AB=2R,两轨道和
地心在同一平面内,C、D为两轨道的交点。己知轨道Ⅱ上的卫星运动到C点
时A.速两度个方轨向道与上AB的平卫行星。在下C点列时说的法加正速确度的相是同( )
B.两个轨道上的卫星在C点时的向心加速度大小相等
C.II轨道上卫星的周期大于I轨道上卫星的周期
D.II轨道上卫星从C经B运动到D的时间与从D经A运动到C的时间相等
16. 如图所示,从地面上A点发射一枚远程弹道导弹,仅在引力作用下,沿ACB
椭圆轨道飞行击中地面目标B,C为轨道的远地点,距地面高度为h,已知地球
半径为R,地球质量为M,引力常量为G。设距地面高度为h的圆轨道上卫星运
动周期为T ,下列结论正确的是( )
0
GM
A.导弹在C点的速度大于
R+h
GM
B.导弹在C点的加速度等于
(R+h)2
C.地球球心为导弹椭圆轨道的一个焦点
D.导弹从A点运动到B点的时间一定小于T
0
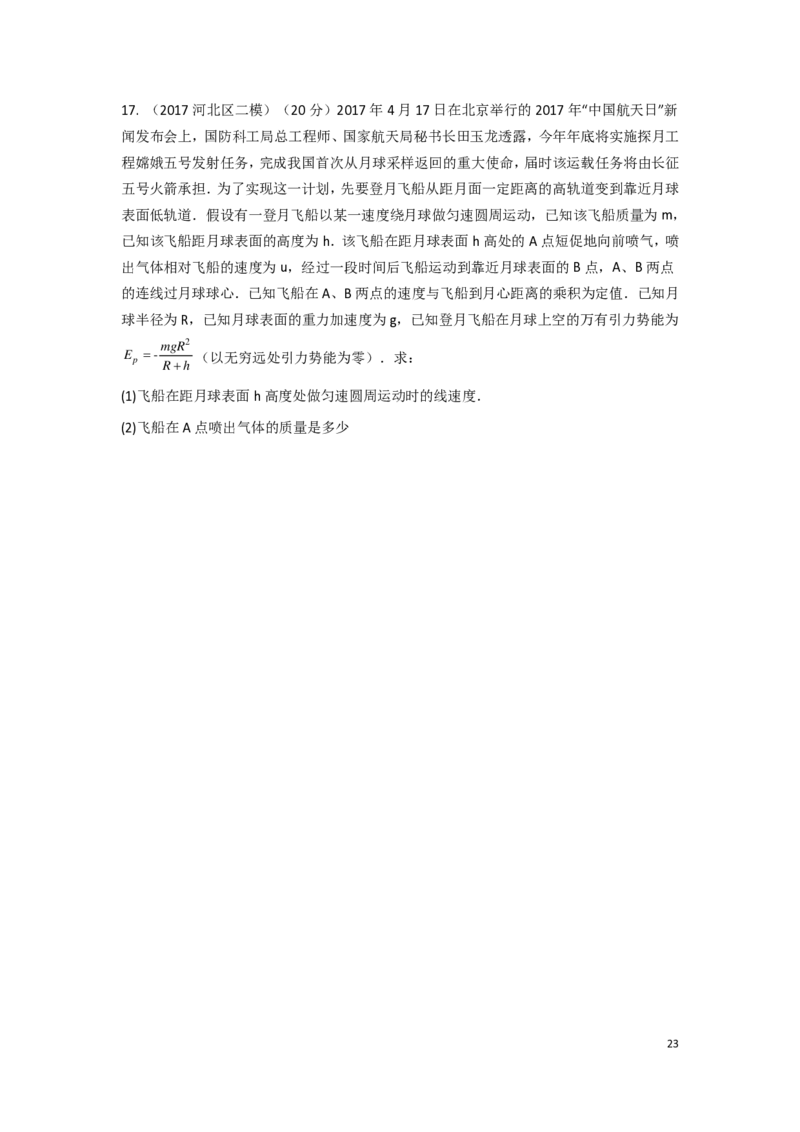
2217. (2017河北区二模)(20分)2017年4月17日在北京举行的2017年“中国航天日”新
闻发布会上,国防科工局总工程师、国家航天局秘书长田玉龙透露,今年年底将实施探月工
程嫦娥五号发射任务,完成我国首次从月球采样返回的重大使命,届时该运载任务将由长征
五号火箭承担.为了实现这一计划,先要登月飞船从距月面一定距离的高轨道变到靠近月球
表面低轨道.假设有一登月飞船以某一速度绕月球做匀速圆周运动,已知该飞船质量为m,
已知该飞船距月球表面的高度为h.该飞船在距月球表面h高处的A点短促地向前喷气,喷
出气体相对飞船的速度为u,经过一段时间后飞船运动到靠近月球表面的B点,A、B两点
的连线过月球球心.已知飞船在A、B两点的速度与飞船到月心距离的乘积为定值.已知月
球半径为R,已知月球表面的重力加速度为g,已知登月飞船在月球上空的万有引力势能为
mgR2
E =- (以无穷远处引力势能为零).求:
p R+h
(1)飞船在距月球表面h高度处做匀速圆周运动时的线速度.
(2)飞船在A点喷出气体的质量是多少
23五.宇宙速度和黑洞
1. (2020北京)我国首次火星探测任务被命名为“天问一号”。已知火星质量约为地球质量的
10%,半径约为地球半径的50%,下列说法正确的是( )
A. 火星探测器的发射速度应大于地球的第二宇宙速度
B. 火星探测器的发射速度应介于地球的第一和第二宇宙速度之间
C. 火星的第一宇宙速度大于地球的第一宇宙速度
D. 火星表面的重力加速度大于地球表面的重力加速度
2.使物体成为卫星的最小发射速度称为第一宇宙速度v1,而使物体脱离星球引力所需要的最
小发射速度称为第二宇宙速度v2, v2与v1的关系是v 2 = 2 v1。已知某星球半径是地球
半径R的1/3 ,其表面的重力加速度是地球表面重力加速度g的1/6 ,地球的平均密度为
ρ,不计其他星球的影响,则( )
A.该星球上的第一宇宙速度为 7.9km/s
B.该星球上的第二宇宙速度为 26.3 km/s
C.该星球的平均密度为ρ/2
8πR3ρ
D.该星球的质量为
81
3. 使物体脱离星球的引力束缚,不再绕星球运行,从星球表面发射所需的最小速度称为第
二宇宙速度,星球的第二宇宙速度 v
2
与第一宇宙速度 v
1
的关系是 v
2
= 2v
1
。已知某星球的
1
半径为r,它表面的重力加速度为地球表面重力加速度g的 。不计其他星球的影响,则该
6
星球的第二宇宙速度为( )
1 1 1
A. gr B. gr C. gr D. gr
6 3 2
4. 在星球表面发射探测器,当发射速度为v时,探测器可绕星球表面做匀速圆周运动;当
发射速度达到 v时,可摆脱星球引力束缚脱离该星球,已知地球、火星两星球的质量比
约为10∶1,半径比约为2∶1,下列说法正确的有( )
A.探测器的质量越大,脱离星球所需的发射速度越大
B.探测器在地球表面受到的引力比在火星表面的大
C.探测器分别脱离两星球所需要的发射速度相等
D.探测器脱离星球的过程中势能逐渐变大
5.(2019年和平二模)近来,有越来越多的天文观测现象和数据证实黑洞确实存在。科学研
究表明,当天体的逃逸速度(即第二宇宙速度,为第一宇宙速度 2 倍)超过光速时,该天
体就是黑洞。已知某天体与地球的质量之比为k,地球的半径为R,地球的第一宇宙速度为
v,光速为c,则要该天体成为黑洞,其半径应小于( )
1
2kv2R 2kc2R v2R c2R
A. 1 B. C. 1 D.
c2 v2 kc2 kv2
1 1
246.(2019 河北区二模)一个多世纪以前,爱因斯坦发表了广义相对论,而现代物理中的黑
洞理论正是建立在该理论的基础上。2019 年 4 月 10 日,事件视界望远镜(EHT)国际合作项
目的天体物理学家宣布,他们首次捕捉到了黑洞的图像。物体从地球上的逃逸速度(第二宇
2Gm
宙速度)v = ,其中G、m、R分别是引力常量、地球的质量和半径,已知G=6.67×10-11N
2 R
⋅m2/kg2,光速c=3×108m/s。已知逃逸速度大于真空中光速的天体叫做黑洞,设某一黑洞的
质量m=5×l031kg,则它的可能最大半径约为( )
A.7.41×102m B.7.41×103m C.7.41×104m D.7.41×105m
7.(2019新华中学10次统练)发射宇宙飞船的过程要克服引力做功,已知将质量为m的飞
GMm
船在距地球中心无限远处移到距地球中心为r处的过程中,引力做功为W = ,式中G
r
为引力常量,M 为地球质量,已知地球半径为 R。若在地球的表面发射一颗人造地球卫星,
如果发射的速度很大,此卫星可以上升到离地心无穷远处(即地球引力作用范围之外),这个
速度称为第二宇宙速度 (也称逃逸速度),则逃逸速度的表达式 ;已知逃逸速度
大于真空中光速的天体叫黑洞,设某黑洞的质量为M′,已知光速c,则它的可能最大半径
是
8. 发射宇宙飞船的过程要克服引力做功,已知将质量为 m 的飞船在距地球中心无限远处移到
Mm
距地球中心为r处的过程中,引力做功为W=G ,飞船在距地球中心为r处的引力势能公式
r
Mm
为E =- G ,式中G为万有引力恒量,M为地球质量。若在地球的表面发射一颗人造地
p
r
球卫星,如果发身的速度很大,此卫星可以上升到离地心无穷远处(即地球引力作用范围之外)
这个速度称为第二宇宙速度(也称逃逸速度)。
(1)试推导第二宇宙速度的表达式?
(2)已知逃逸速度大于真空中光速的天体叫黑洞,设某黑洞的质量等于太阳的质量 M=
1.98×1030kg,求它的可能最大半径?
25六. 双星
1. 两个质量不同的天体构成双星系统,它们以二者连线上的某一点为圆心做匀速圆周运动,
下列说法正确的是( )
A.质量大的天体线速度较大
B.质量小的天体角速度较大
C.两个天体的向心力大小相等
D.若在圆心处放一个质点,它受到的合力为零
2. 2015年4月,科学家通过欧航局天文望远镜在一个河外星系中,发现
了一对相互环绕旋转的超大质量双黑洞系统,如图所示。这也是天文学家
首次在正常星系中发现超大质量双黑洞。这对验证宇宙学与星系演化模型、
广义相对论在极端条件下的适应性等都具有十分重要的意义。我国今年底
也将发射全球功能最强的暗物质探测卫星。若图中双黑洞的质量分别为
M 和M ,它们以两者连线上的某一点为圆心做匀速圆周运动。根据所学
1 2
知识,下列选项正确的是( )
A.双黑洞的角速度之比ω ∶ω =M ∶M
1 2 2 1
B.双黑洞的轨道半径之比r ∶r =M ∶M
1 2 2 1
C.双黑洞的线速度之比v ∶v =M ∶M
1 2 1 2
D.双黑洞的向心加速度之比a ∶a =M ∶M
1 2 1 2
3. (2020 南开中学四月考)我们的银河系的恒星中大约四分之一是双星,某双星由质量不等的
星体S 和S 成,两星在相互之间的万有引力作用下绕两者连线上某一定点C做匀速圆周运
1 2
动.由天文观察测得其运动周期为T,S 到C点的距离为r ,S 和S 的距离为r,已知万有引
1 1 1 2
力常量为G. 则S 的质量为( )
2
4π2r(2 r-r) 4π2r2 4π2r3 4π2r2r
A. 1 B. 1 C. 1 D. 1
GT2 GT2 GT2 GT2
4.宇宙中,两颗靠得比较近的恒星,只受到彼此之间的万有引力作用相互绕转,称之为双星
系统。在浩瀚的银河系中,多数恒星都是双星系统。设某双星系统A、B绕其连线上的O点
做匀速圆周运动,如图所示。若AO>OB,则( )
A.星球A的质量一定大于星球B的质量
B.星球A的线速度一定大于星球B的线速度
C.双星间距离一定,双星的质量越大,其转动周期越大
D.双星的质量一定,双星之间的距离越大,其转动周期越大
265. 米歇尔•麦耶和迪迪埃•奎洛兹因为发现了第一颗太
阳系外行星﹣飞马座51b而获得2019年诺贝尔物理学奖。
飞马座51b与恒星相距为L,构成双星系统(如图所示),
它们绕共同的圆心O做匀速圆周运动。设它们的质量分别为m 、m 且(m <m ),已知万
1 2 1 2
有引力常量为G.则下列说法正确的是( )
A.飞马座51b与恒星运动具有相同的线速度
B.飞马座51b与恒星运动所受到的向心力之比为m :m
1 2
C.飞马座51b与恒星运动轨道的半径之比为m :m
2 1
D.飞马座51b与恒星运动周期之比为m :m
1 2
6. 美国宇航局利用开普勒太空望远镜发现了一个新的双星系统,命名为“开普勒-47”,该
系统位于天鹅座内,距离地球大约5 000光年。这一新的系统有一对互相围绕运行的恒星,
运行周期为T,其中一颗大恒星的质量为M,另一颗小恒星质量只有大恒星质量的三分之一。
已知引力常量为G,则下列判断正确的是( )
A.两颗恒星的转动半径之比为1∶1 B.两颗恒星的转动半径之比为1∶2
3 GMT2 3 GMT2
C.两颗恒星相距 D.两颗恒星相距
3π2 4π2
7. 如图所示,某双星系统的两星A和B各自绕其连线上的O点做匀速圆
周运动,已知A星和B星的质量分别为m 和m ,相距为d.下列说法正确
1 2
的是( )
m1
A. A星的轨道半径为 d
m1+m2A
E
B.A星和B星的线速度之比为m1:m2
C. 若在O点放一个质点,它受到的合力一定为零
D. 若A星所受B星的引力可等效为位于O点处质量为m′的星体对它的引力,则m′=
m3
2
(m +m )2
1 2
8. 2016 年2 月11 日,美国科学家宣布探测到引力波的存在,引力波的发现将为人类探索
宇宙提供新视角,这是一个划时代的发现。在如图所示的双星系统中,A、B 两个恒星靠着
相互之间的引力正在做匀速圆周运动,已知恒星A的质量为太阳质量的29倍,恒星B的质
量为太阳质量的36 倍,两星之间的距离 L=2×105m,太阳质量 M=2×1030kg,万有引力常
量 G=6.67×10-11N·m2/kg2 。若两星在环绕过程中会辐射出引力波,该引力波的频率与两
星做圆周运动的频率具有相同的数量级,则根据题目所给信息估算该引力波频率的数量级是
( )
A.102Hz B.104Hz
C.106Hz D.108Hz
[来源:学。科。网Z。X。X。K]
279. 2016年2月11日,美国科学家宣布探测到引力波,证实了爱因斯坦100年前的预测,弥补了
爱因斯坦广义相对论中最后一块缺失的“拼图”.双星的运动是产生引力波的来源之一,假设
宇宙中有一双星系统由a、b两颗星体组成,这两颗星绕它们连线的某一点在万有引力作用下
作匀速圆周运动,测得a星的周期为T, a、b两颗星的距离为l、a、b两颗星的轨道半径之差
为△r,(a星的轨道半径大于b星的),则( )
l−∆r π
A、b星的周期为 T B.a星的线速度大小为 (l+∆)r
l+∆r T
1 l+∆r
C、a、b两颗星的半径之比为 D、a、b两颗星的质量之比为
l-∆r l-∆r
10. (2020和平区1模)一个研究小组借助于望远镜,观测到了一组双
星系统,它们绕两者连线上的某点做匀速圆周运动,如图所示。此双
星系统中体积较小成员能“吸食”另一颗体积较大星体表面物质,达
到质量转移的目的,假设在演变的过程中两者球心之间的距离保持不
变,则在最初演变的过程中( )
A.它们做圆周运动的万有引力均不断减小
B.它们做圆周运动的角速度不变
C.体积较大星体圆周运动轨道半径变小
D.体积较大星体圆周运动的线速度变小
11、(2006年天津理综)(22分)神奇的黑洞是近代引力理论所预言的一种特殊天体,探寻
黑洞的方案之一是观测双星系统的运动规律.天文学家观测河外星系
大麦哲伦云时,发现了LMCX-3双星系统,它由可见星A和不可见的暗
星B构成.两星视为质点,不考虑其它星体的影响,A、B围绕两者连
A
线上的O点做匀速圆周运动,它们之间的距离保持不变,如图所示.引 B
O
力常量为G,由观测能够得到可见星A的速率v和运行周期T.
(1)可见星A所受暗星B的引力F可等效为位于O点处质量为m′的
A
星体(可视为质点)对它的引力,设A和B的质量分别为m、m,试求
1 2
m′(用m、m表示);
1 2
(2)求暗星B的的质量m与可见星A的速率v、运行周期T和质量m之间的关系式;
2 1
(3)恒星演化到末期,如果其质量大于太阳质量m的2倍,它将有可能成为黑洞.若可见
s
星 A的速率v = 2.7×105m/s,运行周期T = 4.7π×104s,质量 m=6m,试通过估算来判
1 s
断暗星B有可能是黑洞吗?
(G =6.67×10−11N⋅m2/kg2,m = 2.0×1030kg)
s
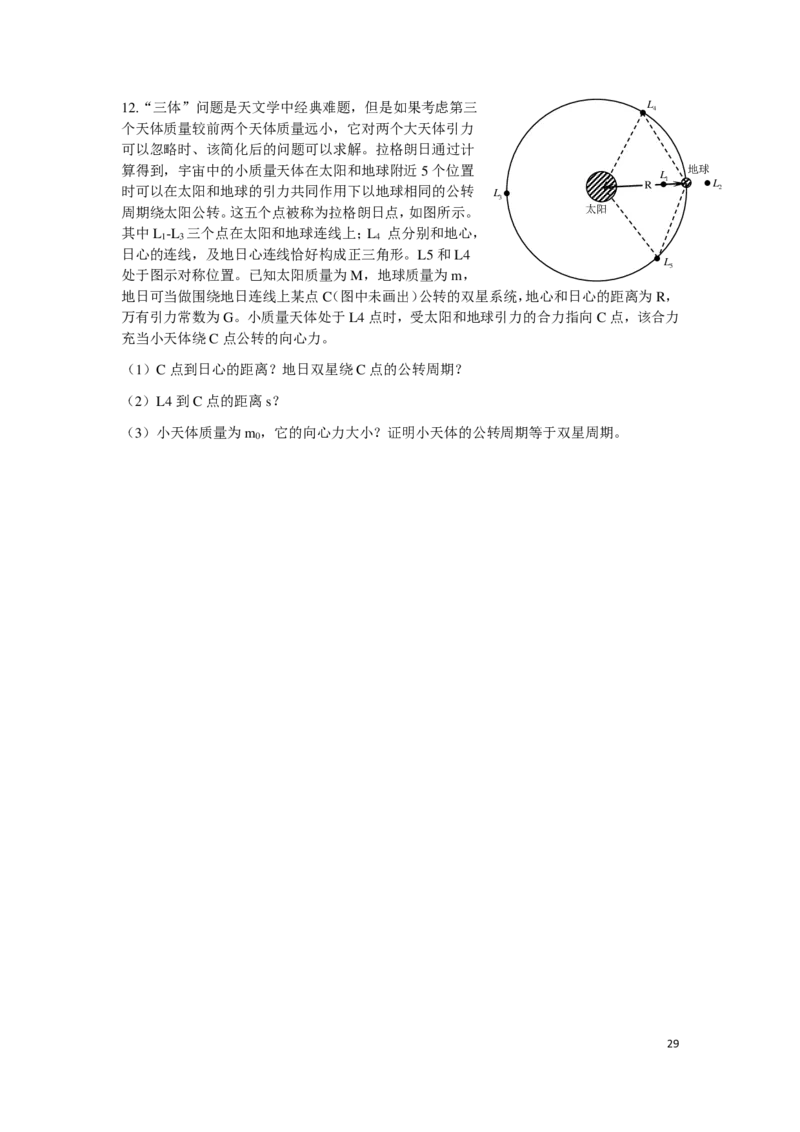
2812.“三体”问题是天文学中经典难题,但是如果考虑第三
•
L
4
个天体质量较前两个天体质量远小,它对两个大天体引力
可以忽略时、该简化后的问题可以求解。拉格朗日通过计
算得到,宇宙中的小质量天体在太阳和地球附近5个位置 地球
L
时可以在太阳和地球的引力共同作用下以地球相同的公转 L• R
•1 •L
2
3
周期绕太阳公转。这五个点被称为拉格朗日点,如图所示。 太阳
其中L -L 三个点在太阳和地球连线上;L 点分别和地心,
1 3 4
日心的连线,及地日心连线恰好构成正三角形。L5和L4 •
L
5
处于图示对称位置。已知太阳质量为M,地球质量为m,
地日可当做围绕地日连线上某点C(图中未画出)公转的双星系统,地心和日心的距离为R,
万有引力常数为G。小质量天体处于L4点时,受太阳和地球引力的合力指向C点,该合力
充当小天体绕C点公转的向心力。
(1)C点到日心的距离?地日双星绕C点的公转周期?
(2)L4到C点的距离s?
(3)小天体质量为m ,它的向心力大小?证明小天体的公转周期等于双星周期。
0
29七.三星
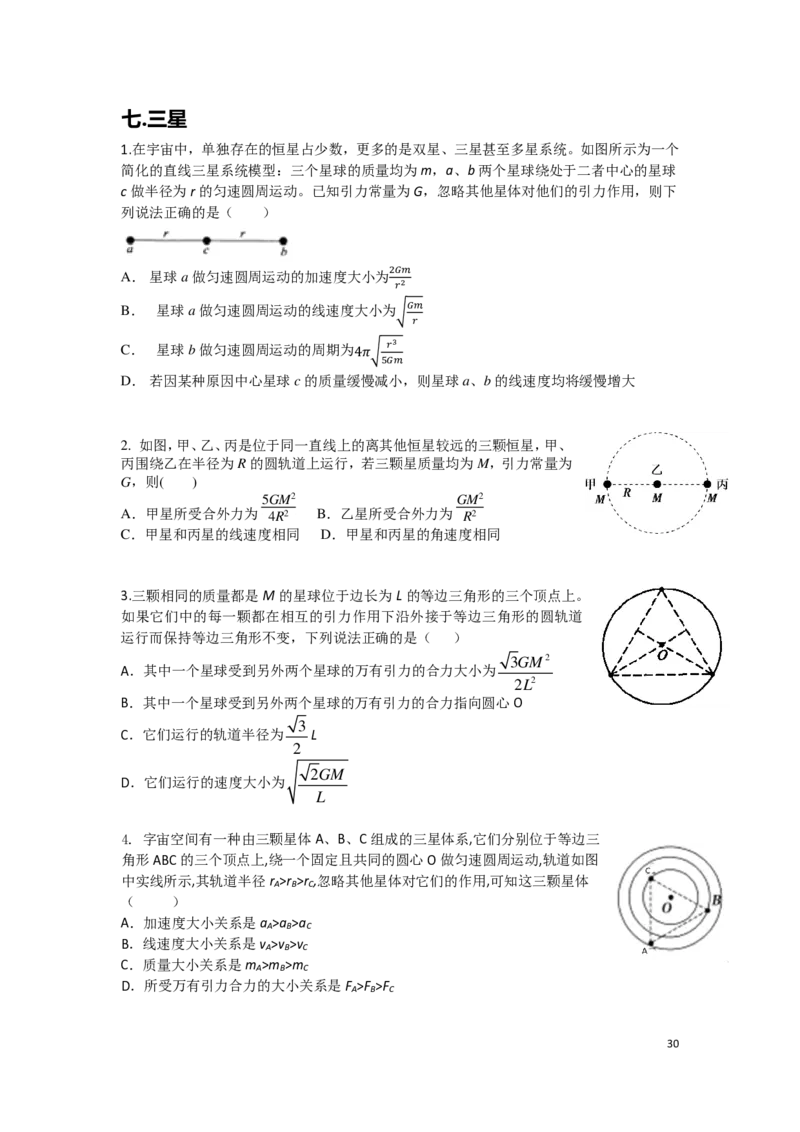
1.在宇宙中,单独存在的恒星占少数,更多的是双星、三星甚至多星系统。如图所示为一个
简化的直线三星系统模型:三个星球的质量均为m,a、b两个星球绕处于二者中心的星球
c做半径为r的匀速圆周运动。已知引力常量为G,忽略其他星体对他们的引力作用,则下
列说法正确的是( )
A. 星球a做匀速圆周运动的加速度大小为
2𝐺𝐺𝐺𝐺
2
B. 星球a做匀速圆周运动的线速度大小为𝑟𝑟
𝐺𝐺𝐺𝐺
C. 星球b做匀速圆周运动的周期为 � 𝑟𝑟
3
𝑟𝑟
D. 若因某种原因中心星球c的质量缓4慢𝜋𝜋�减
5𝐺𝐺
小
𝐺𝐺
,则星球a、b的线速度均将缓慢增大
2. 如图,甲、乙、丙是位于同一直线上的离其他恒星较远的三颗恒星,甲、
丙围绕乙在半径为R的圆轨道上运行,若三颗星质量均为M,引力常量为
G,则( )
5GM2 GM2
A.甲星所受合外力为 A 4R2 E A B.乙星所受合外力为 A R2 E
C.甲星和丙星的线速度相同 D.甲星和丙星的角速度相同
3.三颗相同的质量都是M的星球位于边长为 L 的等边三角形的三个顶点上。
如果它们中的每一颗都在相互的引力作用下沿外接于等边三角形的圆轨道
运行而保持等边三角形不变,下列说法正确的是( )
3GM2
A.其中一个星球受到另外两个星球的万有引力的合力大小为
2L2
B.其中一个星球受到另外两个星球的万有引力的合力指向圆心O
3
C.它们运行的轨道半径为 L
2
2GM
D.它们运行的速度大小为
L
4. 字宙空间有一种由三颗星体A、B、C组成的三星体系,它们分别位于等边三
角形ABC的三个顶点上,绕一个固定且共同的圆心O做匀速圆周运动,轨道如图
中实线所示,其轨道半径r >r >r ,忽略其他星体对它们的作用,可知这三颗星体
A B C
( )
A.加速度大小关系是a >a >a
A B C
B.线速度大小关系是v >v >v
A B C
C.质量大小关系是m >m >m
A B C
D.所受万有引力合力的大小关系是F >F >F
A B C
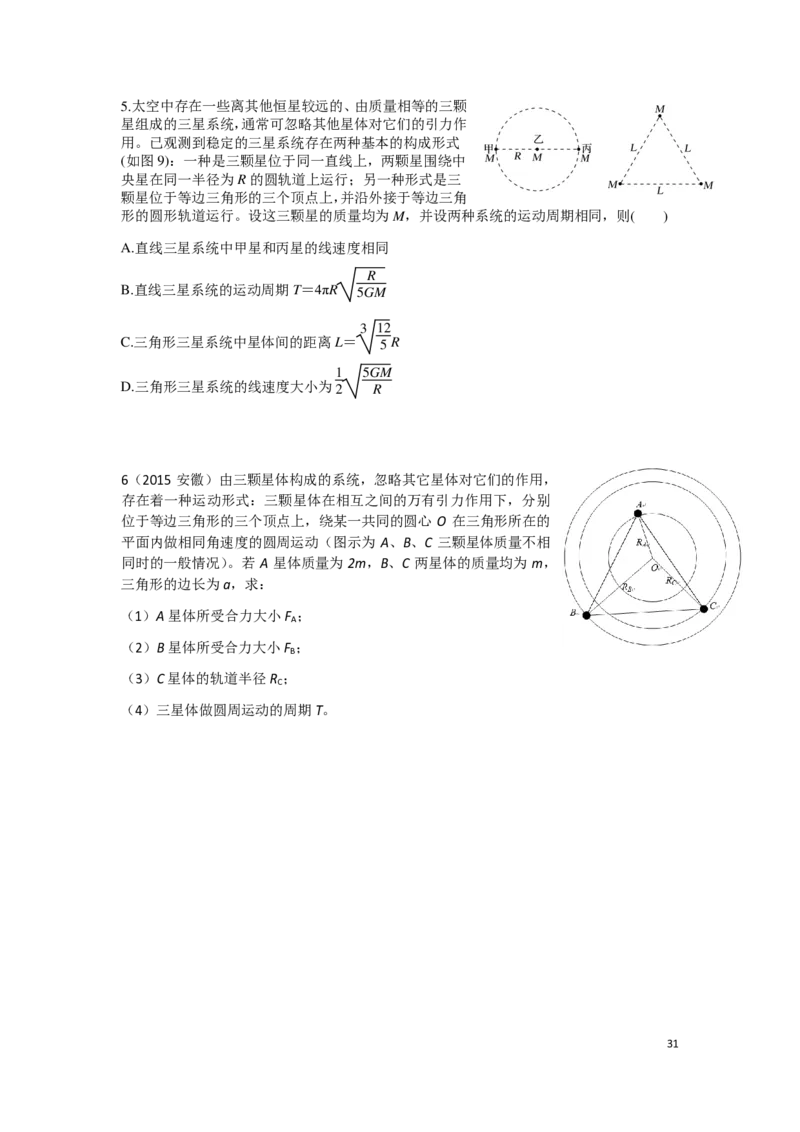
305.太空中存在一些离其他恒星较远的、由质量相等的三颗
星组成的三星系统,通常可忽略其他星体对它们的引力作
用。已观测到稳定的三星系统存在两种基本的构成形式
(如图9):一种是三颗星位于同一直线上,两颗星围绕中
央星在同一半径为R的圆轨道上运行;另一种形式是三
颗星位于等边三角形的三个顶点上,并沿外接于等边三角
形的圆形轨道运行。设这三颗星的质量均为M,并设两种系统的运动周期相同,则( )
A.直线三星系统中甲星和丙星的线速度相同
R
B.直线三星系统的运动周期T=4πR
A 5GME
3 12
C.三角形三星系统中星体间的距离L= A 5EA R
1 5GM
D.三角形三星系统的线速度大小为
A2 EAA R E
6(2015 安徽)由三颗星体构成的系统,忽略其它星体对它们的作用,
存在着一种运动形式:三颗星体在相互之间的万有引力作用下,分别
位于等边三角形的三个顶点上,绕某一共同的圆心 O 在三角形所在的
平面内做相同角速度的圆周运动(图示为 A、B、C 三颗星体质量不相
同时的一般情况)。若 A 星体质量为 2m,B、C 两星体的质量均为 m,
三角形的边长为a,求:
(1)A星体所受合力大小F ;
A
(2)B星体所受合力大小F ;
B
(3)C星体的轨道半径R ;
C
(4)三星体做圆周运动的周期T。
31动量
1. 碰撞的结果判断
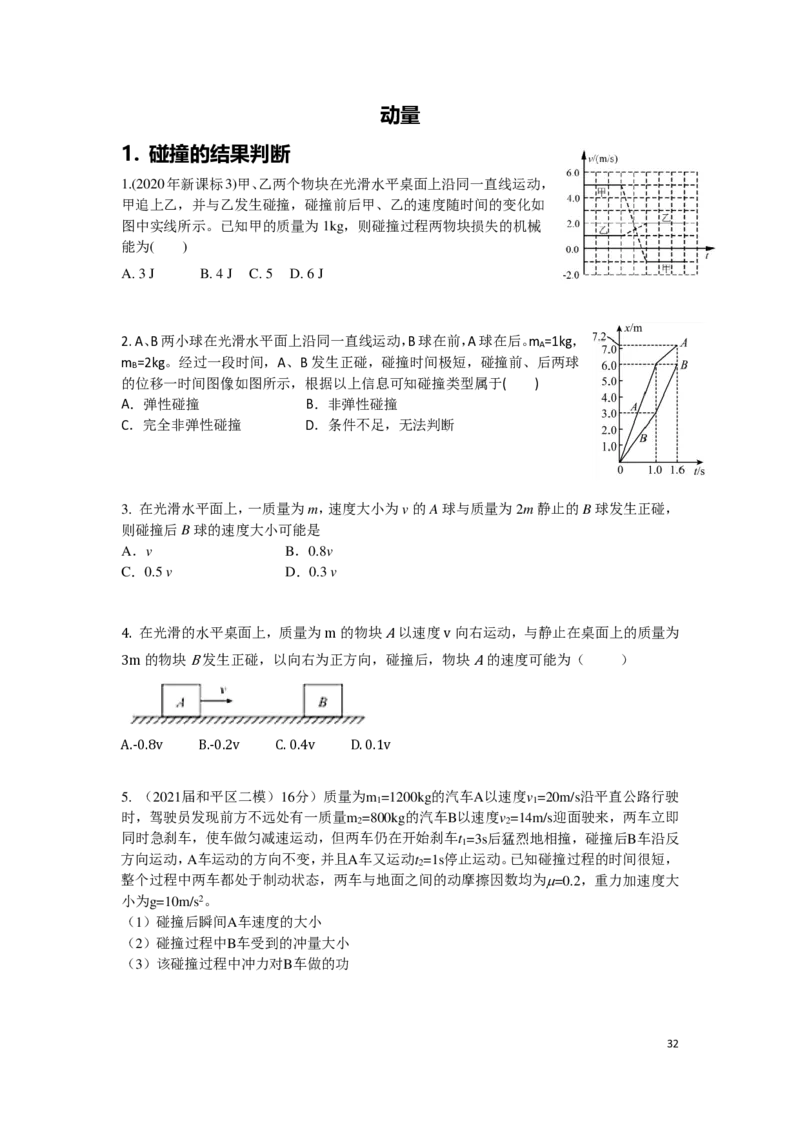
1.(2020年新课标3)甲、乙两个物块在光滑水平桌面上沿同一直线运动,
甲追上乙,并与乙发生碰撞,碰撞前后甲、乙的速度随时间的变化如
图中实线所示。已知甲的质量为1kg,则碰撞过程两物块损失的机械
能为( )
A. 3 J B. 4 J C. 5 D. 6 J
2. A、B两小球在光滑水平面上沿同一直线运动,B球在前,A球在后。m =1kg,
A
m =2kg。经过一段时间,A、B发生正碰,碰撞时间极短,碰撞前、后两球
B
的位移一时间图像如图所示,根据以上信息可知碰撞类型属于( )
A.弹性碰撞 B.非弹性碰撞
C.完全非弹性碰撞 D.条件不足,无法判断
3. 在光滑水平面上,一质量为m,速度大小为v的A球与质量为2m静止的B球发生正碰,
则碰撞后B球的速度大小可能是
A.v B.0.8v
C.0.5 v D.0.3 v
在光滑的水平桌面上,质量为 的物块 以速度 向右运动,与静止在桌面上的质量为
的物块 发生正碰,以向右为正方向,碰撞后,物块 的速度可能为( )
4. m A v
3m B A
A.-0.8v B.-0.2v C. 0.4v D. 0.1v
5. (2021届和平区二模)16分)质量为m
1
=1200kg的汽车A以速度v
1
=20m/s沿平直公路行驶
时,驾驶员发现前方不远处有一质量m =800kg的汽车B以速度v =14m/s迎面驶来,两车立即
2 2
同时急刹车,使车做匀减速运动,但两车仍在开始刹车t =3s后猛烈地相撞,碰撞后B车沿反
1
方向运动,A车运动的方向不变,并且A车又运动t =1s停止运动。已知碰撞过程的时间很短,
2
整个过程中两车都处于制动状态,两车与地面之间的动摩擦因数均为µ=0.2,重力加速度大
小为g=10m/s2。
(1)碰撞后瞬间A车速度的大小
(2)碰撞过程中B车受到的冲量大小
(3)该碰撞过程中冲力对B车做的功
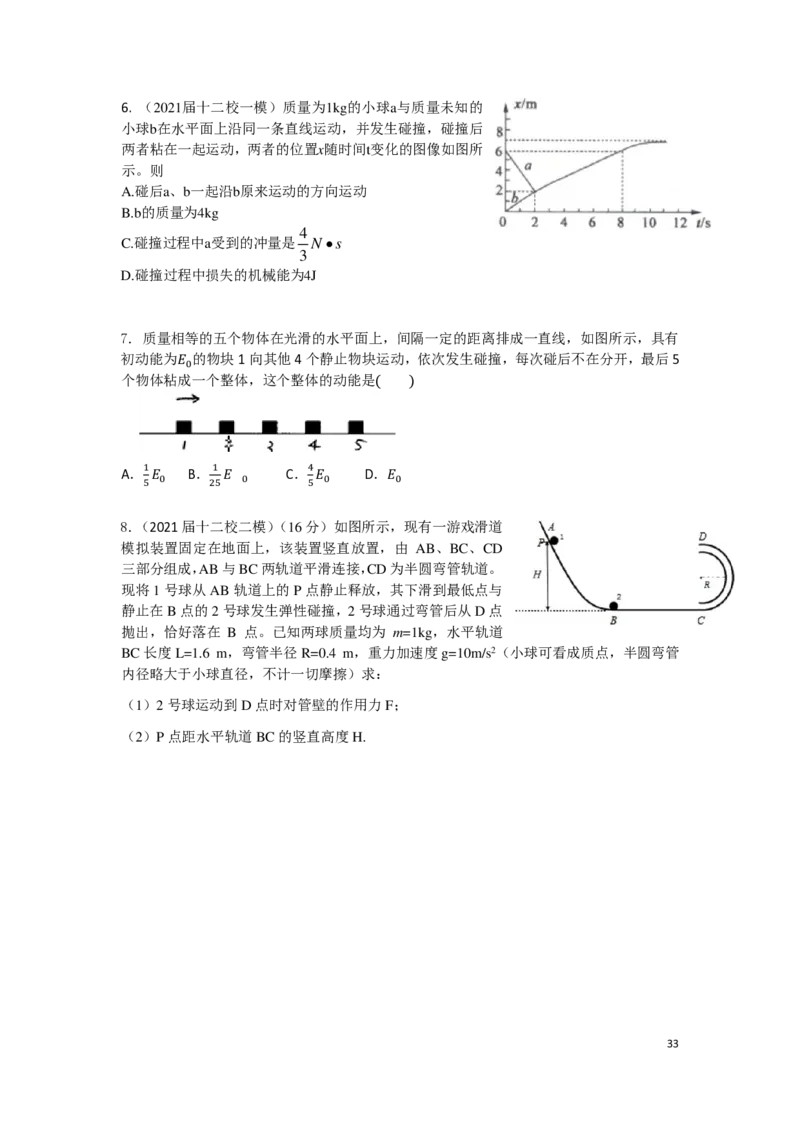
326. (2021届十二校一模)质量为1kg的小球a与质量未知的
小球b在水平面上沿同一条直线运动,并发生碰撞,碰撞后
两者粘在一起运动,两者的位置x随时间t变化的图像如图所
示。则
A.碰后a、b一起沿b原来运动的方向运动
B.b的质量为4kg
4
C.碰撞过程中a受到的冲量是 N•s
3
D.碰撞过程中损失的机械能为4J
7. 质量相等的五个物体在光滑的水平面上,间隔一定的距离排成一直线,如图所示,具有
初动能为 的物块1向其他4个静止物块运动,依次发生碰撞,每次碰后不在分开,最后5
个物体粘成一个整体,这个整体的动能是
𝐸𝐸0
( )
A. B. C. D.
1 1 4
5𝐸𝐸0 25𝐸𝐸 0 5𝐸𝐸0 𝐸𝐸0
8.(2021届十二校二模)(16分)如图所示,现有一游戏滑道
模拟装置固定在地面上,该装置竖直放置,由 AB、BC、CD
三部分组成,AB与BC两轨道平滑连接,CD为半圆弯管轨道。
现将1号球从AB轨道上的P点静止释放,其下滑到最低点与
静止在B点的2号球发生弹性碰撞,2号球通过弯管后从D点
抛出,恰好落在 B 点。已知两球质量均为 m=1kg,水平轨道
BC长度L=1.6 m,弯管半径R=0.4 m,重力加速度g=10m/s2(小球可看成质点,半圆弯管
内径略大于小球直径,不计一切摩擦)求:
(1)2号球运动到D点时对管壁的作用力F;
(2)P点距水平轨道BC的竖直高度H.
[来源:学|科|网]
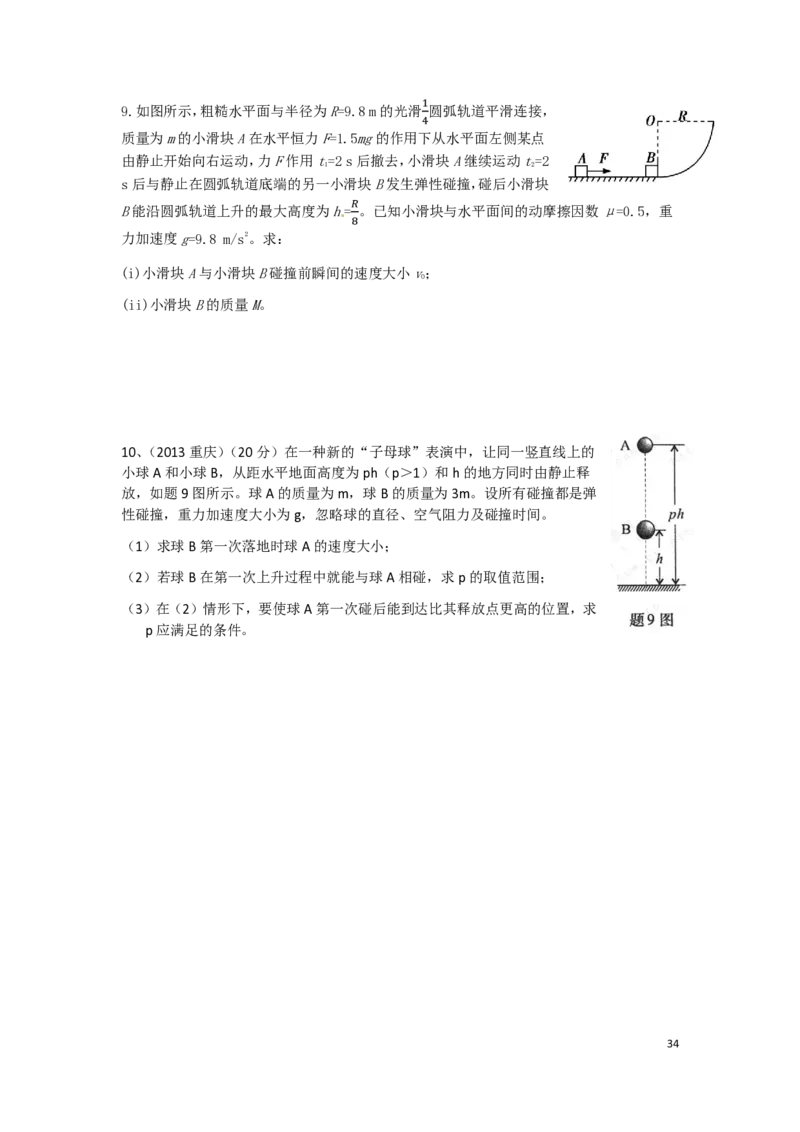
339.如图所示,粗糙水平面与半径为R=9.8 m的光滑 圆弧轨道平滑连接,
1
质量为m的小滑块A在水平恒力F=1.5mg的作用下从水平面左侧某点
4
由静止开始向右运动,力F作用t=2 s后撤去,小滑块A继续运动t=2
1 2
s后与静止在圆弧轨道底端的另一小滑块B发生弹性碰撞,碰后小滑块
B能沿圆弧轨道上升的最大高度为h= 。已知小滑块与水平面间的动摩擦因数μ=0.5,重
𝑅𝑅
力加速度g=9.8 m/s2。求:
8
(i)小滑块A与小滑块B碰撞前瞬间的速度大小v;
0
(ii)小滑块B的质量M。
10、(2013重庆)(20分)在一种新的“子母球”表演中,让同一竖直线上的
小球A和小球B,从距水平地面高度为ph(p>1)和h的地方同时由静止释
放,如题9图所示。球A的质量为m,球B的质量为3m。设所有碰撞都是弹
性碰撞,重力加速度大小为g,忽略球的直径、空气阻力及碰撞时间。
(1)求球B第一次落地时球A的速度大小;
(2)若球B在第一次上升过程中就能与球A相碰,求p的取值范围;
(3)在(2)情形下,要使球A第一次碰后能到达比其释放点更高的位置,求
p应满足的条件。
342. 板块模型/子弹木块模型
1. 子弹水平射入静止在光滑水平面上的木块,子弹入射时速度为v,射入木块s深后与木
0
块共同以速度v运动,设子弹与木块均做匀变速直线运动,则从子弹射入木块至与木块相对
静止的过程中木块滑行的距离为( )
A. B. C. D.
2 2
𝑣𝑣 𝑣𝑣0 𝑣𝑣 𝑣𝑣0
𝑣𝑣0𝑠𝑠 𝑣𝑣 𝑠𝑠 𝑣𝑣0
2
𝑠𝑠 𝑣𝑣
2
𝑠𝑠
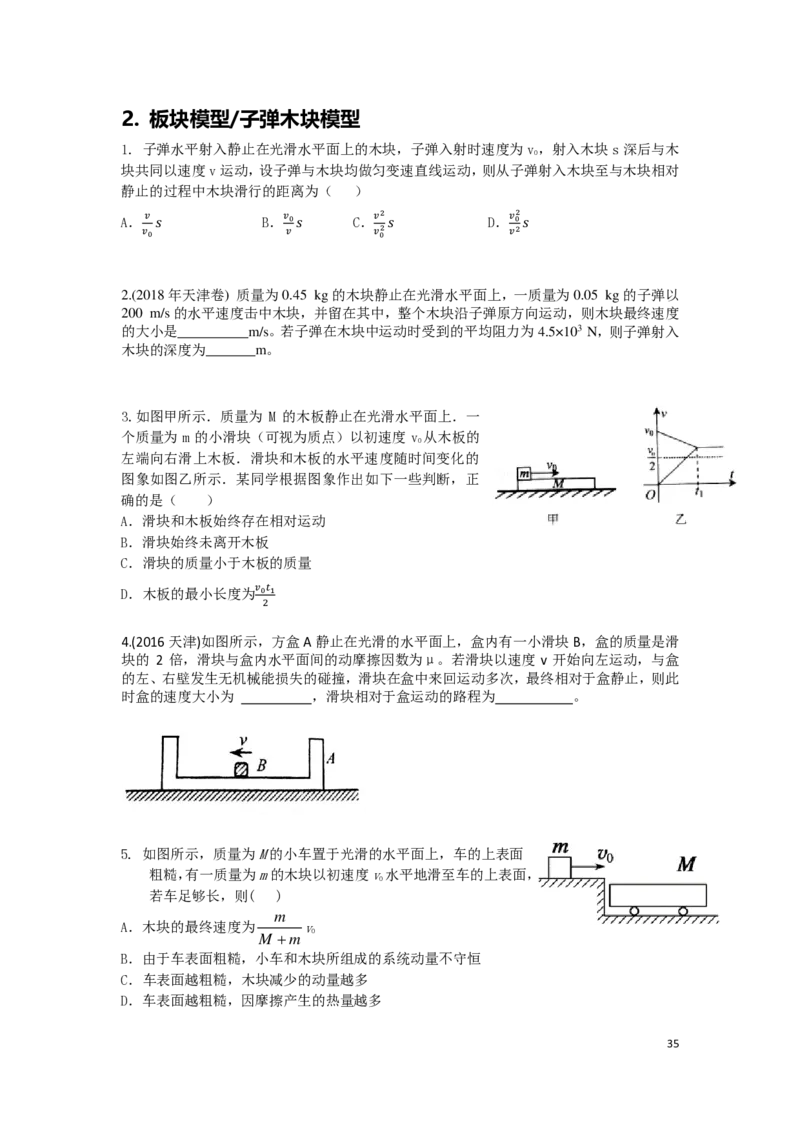
2.(2018年天津卷) 质量为0.45 kg的木块静止在光滑水平面上,一质量为0.05 kg的子弹以
200 m/s的水平速度击中木块,并留在其中,整个木块沿子弹原方向运动,则木块最终速度
的大小是__________m/s。若子弹在木块中运动时受到的平均阻力为4.5×103 N,则子弹射入
木块的深度为_______m。
3.如图甲所示.质量为 M 的木板静止在光滑水平面上.一
个质量为 m 的小滑块(可视为质点)以初速度 v 从木板的
0
左端向右滑上木板.滑块和木板的水平速度随时间变化的
图象如图乙所示.某同学根据图象作出如下一些判断,正
确的是( )
A.滑块和木板始终存在相对运动
B.滑块始终未离开木板
C.滑块的质量小于木板的质量
D.木板的最小长度为
𝑣𝑣0𝑡𝑡1
2
4.(2016天津)如图所示,方盒A静止在光滑的水平面上,盒内有一小滑块B,盒的质量是滑
块的 2 倍,滑块与盒内水平面间的动摩擦因数为μ。若滑块以速度 v 开始向左运动,与盒
的左、右壁发生无机械能损失的碰撞,滑块在盒中来回运动多次,最终相对于盒静止,则此
时盒的速度大小为 ,滑块相对于盒运动的路程为 。
5. 如图所示,质量为M的小车置于光滑的水平面上,车的上表面
粗糙,有一质量为m的木块以初速度v水平地滑至车的上表面,
0
若车足够长,则( )
m
A.木块的最终速度为 v
0
M +m
B.由于车表面粗糙,小车和木块所组成的系统动量不守恒
C.车表面越粗糙,木块减少的动量越多
D.车表面越粗糙,因摩擦产生的热量越多
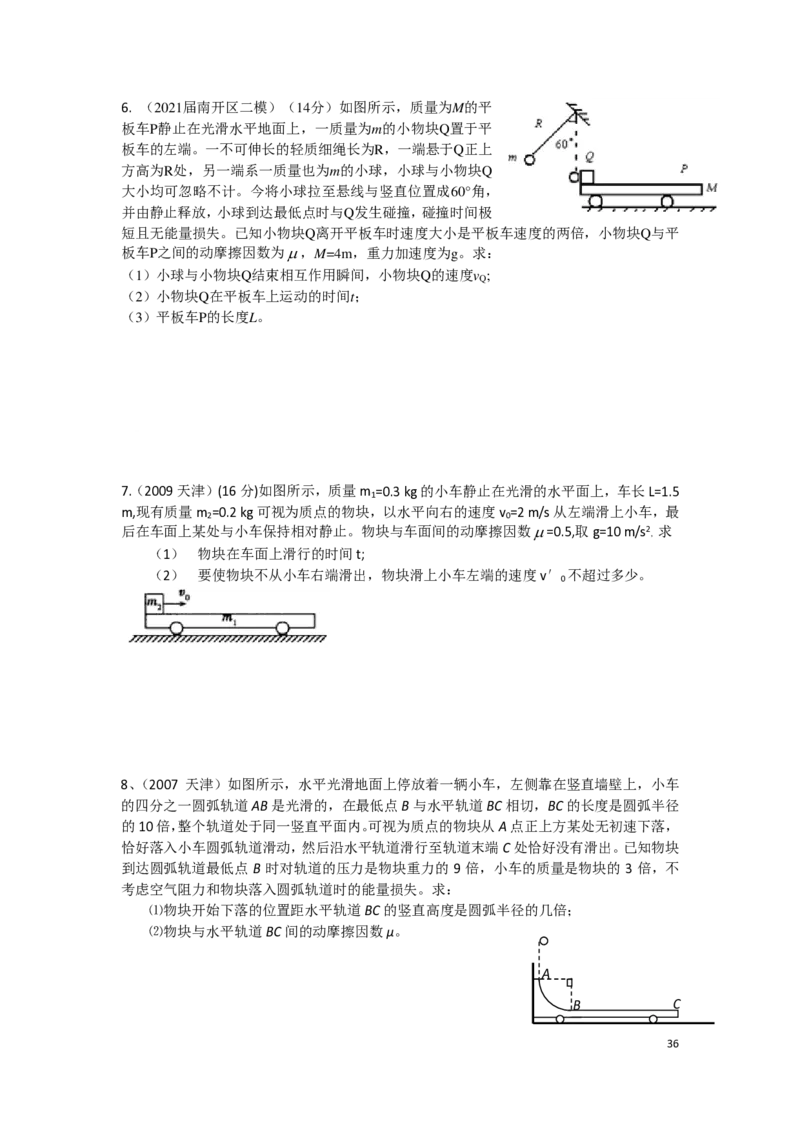
356. (2021届南开区二模)(14分)如图所示,质量为M的平
板车P静止在光滑水平地面上,一质量为m的小物块Q置于平
板车的左端。一不可伸长的轻质细绳长为R,一端悬于Q正上
方高为R处,另一端系一质量也为m的小球,小球与小物块Q
大小均可忽略不计。今将小球拉至悬线与竖直位置成60°角,
并由静止释放,小球到达最低点时与Q发生碰撞,碰撞时间极
短且无能量损失。已知小物块Q离开平板车时速度大小是平板车速度的两倍,小物块Q与平
板车P之间的动摩擦因数为µ,M=4m,重力加速度为g。求:
(1)小球与小物块Q结束相互作用瞬间,小物块Q的速度v ;
Q
(2)小物块Q在平板车上运动的时间t;
(3)平板车P的长度L。
7.(2009天津)(16分)如图所示,质量m =0.3 kg的小车静止在光滑的水平面上,车长L=1.5
1
m,现有质量m =0.2 kg可视为质点的物块,以水平向右的速度v =2 m/s从左端滑上小车,最
2 0
后在车面上某处与小车保持相对静止。物块与车面间的动摩擦因数µ=0.5,取g=10 m/s2 求
,
(1) 物块在车面上滑行的时间t;
(2) 要使物块不从小车右端滑出,物块滑上小车左端的速度v′ 不超过多少。
0
8、(2007 天津)如图所示,水平光滑地面上停放着一辆小车,左侧靠在竖直墙壁上,小车
的四分之一圆弧轨道AB是光滑的,在最低点B与水平轨道BC相切,BC的长度是圆弧半径
的10倍,整个轨道处于同一竖直平面内。可视为质点的物块从A点正上方某处无初速下落,
恰好落入小车圆弧轨道滑动,然后沿水平轨道滑行至轨道末端C处恰好没有滑出。已知物块
到达圆弧轨道最低点 B 时对轨道的压力是物块重力的 9 倍,小车的质量是物块的 3 倍,不
考虑空气阻力和物块落入圆弧轨道时的能量损失。求:
⑴物块开始下落的位置距水平轨道BC的竖直高度是圆弧半径的几倍;
⑵物块与水平轨道BC间的动摩擦因数μ。
A
B C
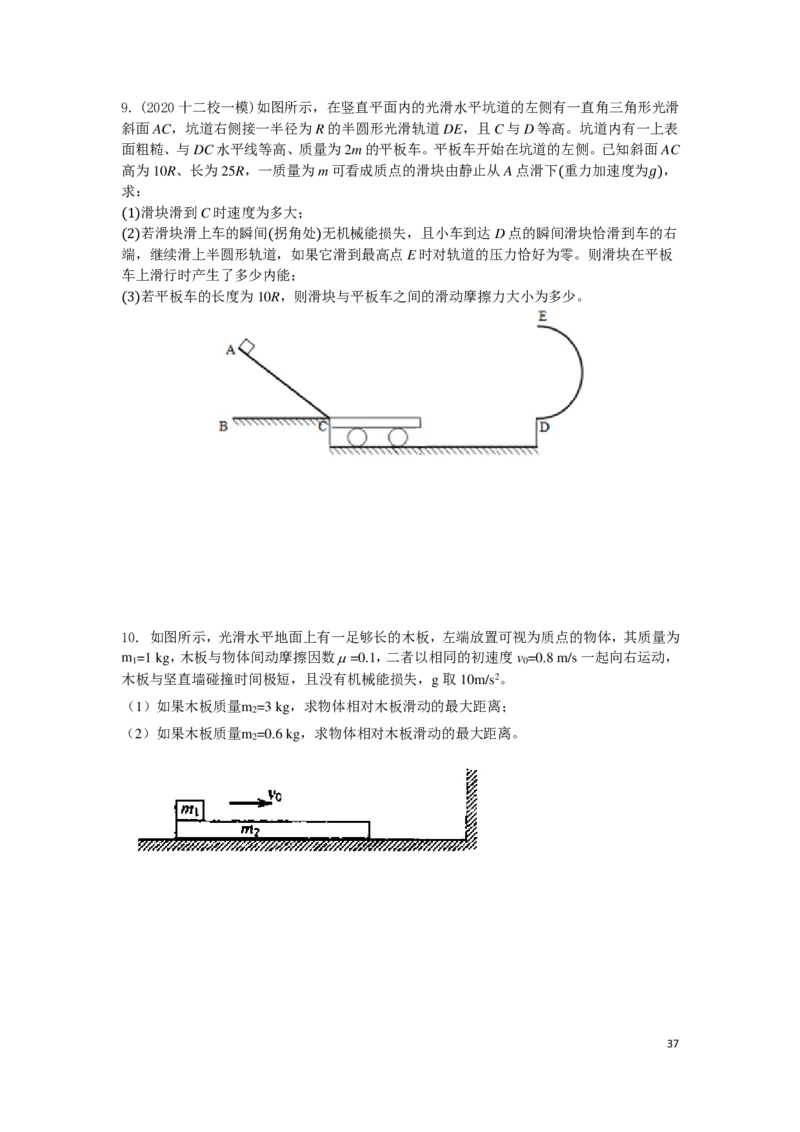
369. (2020十二校一模)如图所示,在竖直平面内的光滑水平坑道的左侧有一直角三角形光滑
斜面AC,坑道右侧接一半径为R的半圆形光滑轨道DE,且C与D等高。坑道内有一上表
面粗糙、与DC水平线等高、质量为2m的平板车。平板车开始在坑道的左侧。已知斜面AC
高为10R、长为25R,一质量为m可看成质点的滑块由静止从A点滑下 重力加速度为 ,
求:
( 𝑔𝑔)
滑块滑到C时速度为多大;
若滑块滑上车的瞬间 拐角处 无机械能损失,且小车到达D点的瞬间滑块恰滑到车的右
(1)
端,继续滑上半圆形轨道,如果它滑到最高点E时对轨道的压力恰好为零。则滑块在平板
(2) ( )
车上滑行时产生了多少内能;
若平板车的长度为10R,则滑块与平板车之间的滑动摩擦力大小为多少。
(3)
10. 如图所示,光滑水平地面上有一足够长的木板,左端放置可视为质点的物体,其质量为
m =1 kg,木板与物体间动摩擦因数µ=0.1,二者以相同的初速度v =0.8 m/s一起向右运动,
1 0
木板与坚直墙碰撞时间极短,且没有机械能损失,g取10m/s2。
(1)如果木板质量m =3 kg,求物体相对木板滑动的最大距离;
2
(2)如果木板质量m =0.6 kg,求物体相对木板滑动的最大距离。
2
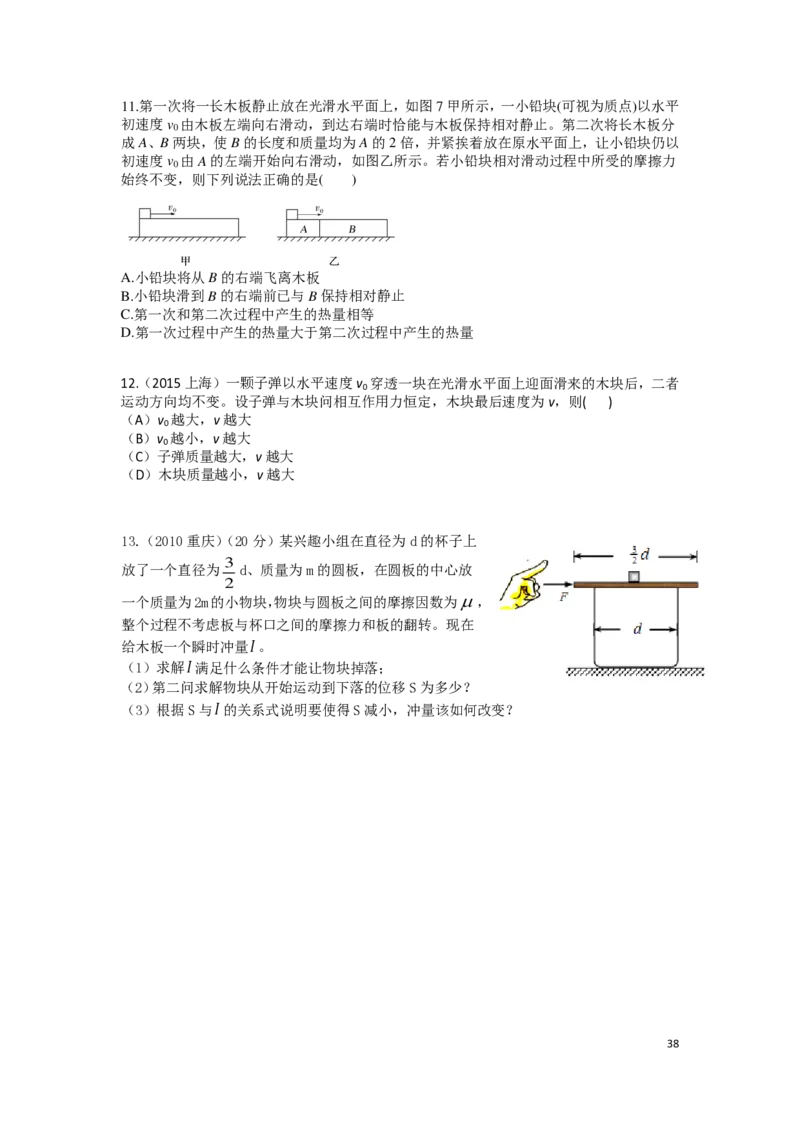
3711.第一次将一长木板静止放在光滑水平面上,如图7甲所示,一小铅块(可视为质点)以水平
初速度v 由木板左端向右滑动,到达右端时恰能与木板保持相对静止。第二次将长木板分
0
成A、B两块,使B的长度和质量均为A的2倍,并紧挨着放在原水平面上,让小铅块仍以
初速度v 由A的左端开始向右滑动,如图乙所示。若小铅块相对滑动过程中所受的摩擦力
0
始终不变,则下列说法正确的是( )
A.小铅块将从B的右端飞离木板
B.小铅块滑到B的右端前已与B保持相对静止
C.第一次和第二次过程中产生的热量相等
D.第一次过程中产生的热量大于第二次过程中产生的热量
12.(2015上海)一颗子弹以水平速度v 穿透一块在光滑水平面上迎面滑来的木块后,二者
0
运动方向均不变。设子弹与木块问相互作用力恒定,木块最后速度为v,则( )
(A)v 越大,v越大
0
(B)v 越小,v越大
0
(C)子弹质量越大,v越大
(D)木块质量越小,v越大
13.(2010重庆)(20分)某兴趣小组在直径为d的杯子上
3
放了一个直径为 d、质量为m的圆板,在圆板的中心放
2
一个质量为2m的小物块,物块与圆板之间的摩擦因数为µ,
整个过程不考虑板与杯口之间的摩擦力和板的翻转。现在
给木板一个瞬时冲量I。
(1)求解I满足什么条件才能让物块掉落;
(2)第二问求解物块从开始运动到下落的位移S为多少?
(3)根据S与I的关系式说明要使得S减小,冲量该如何改变?
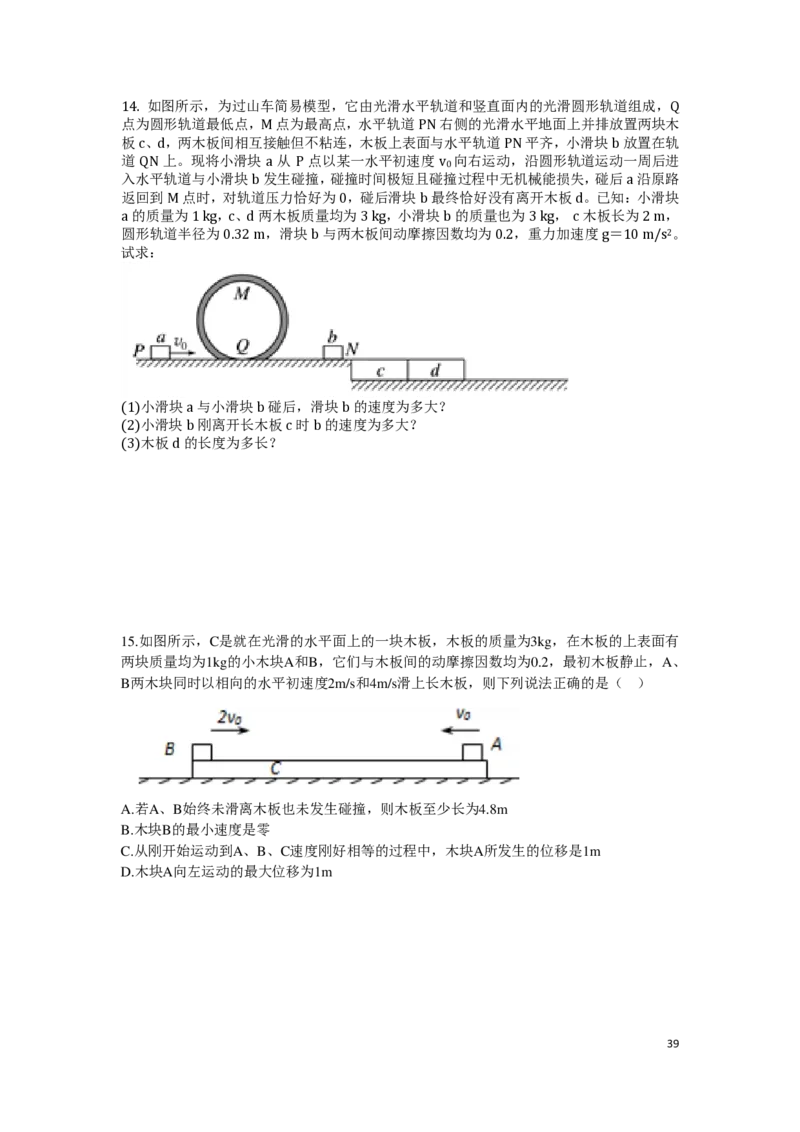
38如图所示,为过山车简易模型,它由光滑水平轨道和竖直面内的光滑圆形轨道组成,
点为圆形轨道最低点, 点为最高点,水平轨道 右侧的光滑水平地面上并排放置两块木
1板4. 、 ,两木板间相互接触但不粘连,木板上表面与水平轨道 平齐,小滑块 放置在轨Q
道 上。现将小滑块M 从 点以某一水平初速P度N 向右运动,沿圆形轨道运动一周后进
入水c 平d轨道与小滑块 发生碰撞,碰撞时间极短且碰撞过程中无PN机械能损失,碰后b 沿原路
0
返回QN到 点时,对轨道压a 力恰P好为 ,碰后滑块 最v终恰好没有离开木板 。已知:小滑块
的质量为 ,、b两木板质量均为 ,小滑块 的质量也为 , 木板长为a ,
圆形轨道M半径为 ,滑块 与两0木板间动摩b擦因数均为 ,重力加速d度 = 。
试a 求: 1 kg c d 3 kg b 3 kg c 2 m
2
0.32 m b 0.2 g 10 m/s
小滑块 与小滑块 碰后,滑块 的速度为多大?
小滑块 刚离开长木板 时 的速度为多大?
(1)木板 的a 长度为多长b? b
(2) b c b
(3) d
15.如图所示,C是就在光滑的水平面上的一块木板,木板的质量为3kg,在木板的上表面有
两块质量均为1kg的小木块A和B,它们与木板间的动摩擦因数均为0.2,最初木板静止,A、
B两木块同时以相向的水平初速度2m/s和4m/s滑上长木板,则下列说法正确的是( )
A.若A、B始终未滑离木板也未发生碰撞,则木板至少长为4.8m
B.木块B的最小速度是零
C.从刚开始运动到A、B、C速度刚好相等的过程中,木块A所发生的位移是1m
D.木块A向左运动的最大位移为1m
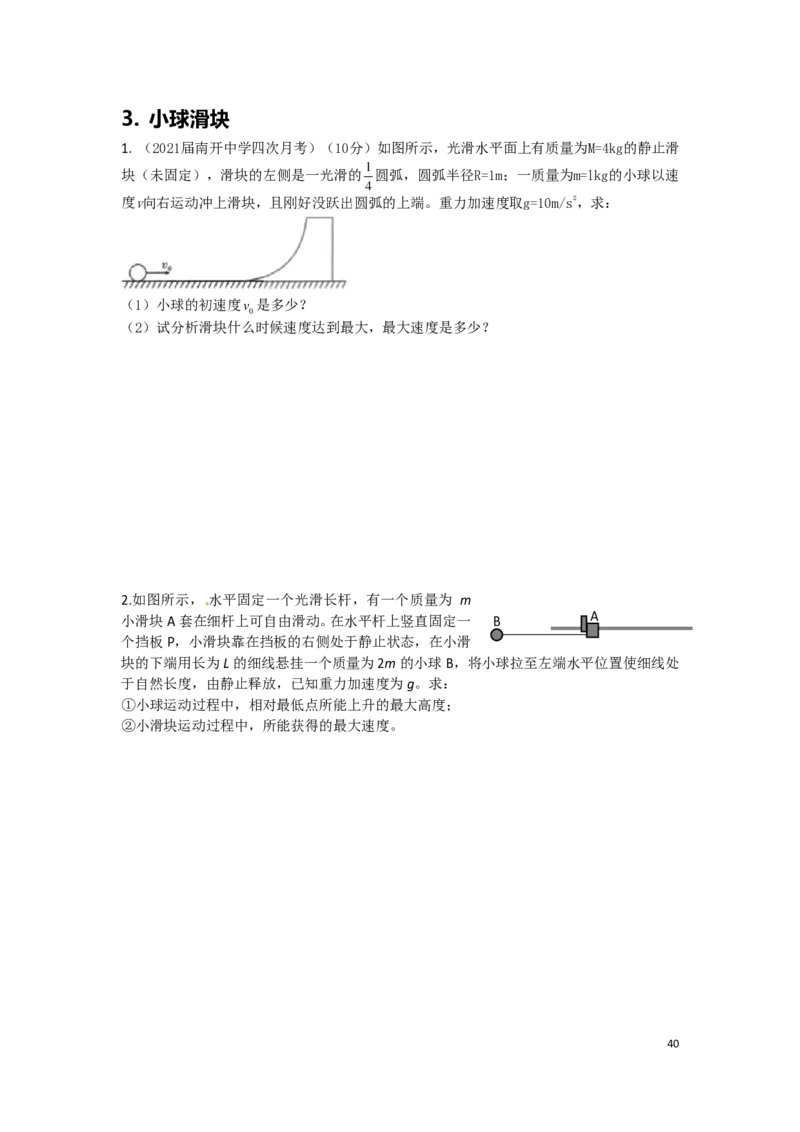
393. 小球滑块
1. (2021届南开中学四次月考)(10分)如图所示,光滑水平面上有质量为M=4kg的静止滑
1
块(未固定),滑块的左侧是一光滑的 圆弧,圆弧半径R=1m;一质量为m=lkg的小球以速
4
度v向右运动冲上滑块,且刚好没跃出圆弧的上端。重力加速度取g=10m/s2,求:
(1)小球的初速度v 是多少?
0
(2)试分析滑块什么时候速度达到最大,最大速度是多少?
2.如图所示, 水平固定一个光滑长杆,有一个质量为 m
小滑块A套在细杆上可自由滑动。在水平杆上竖直固定一 B A
个挡板P,小滑块靠在挡板的右侧处于静止状态,在小滑
块的下端用长为L的细线悬挂一个质量为2m的小球B,将小球拉至左端水平位置使细线处
于自然长度,由静止释放,已知重力加速度为g。求:
①小球运动过程中,相对最低点所能上升的最大高度;
②小滑块运动过程中,所能获得的最大速度。
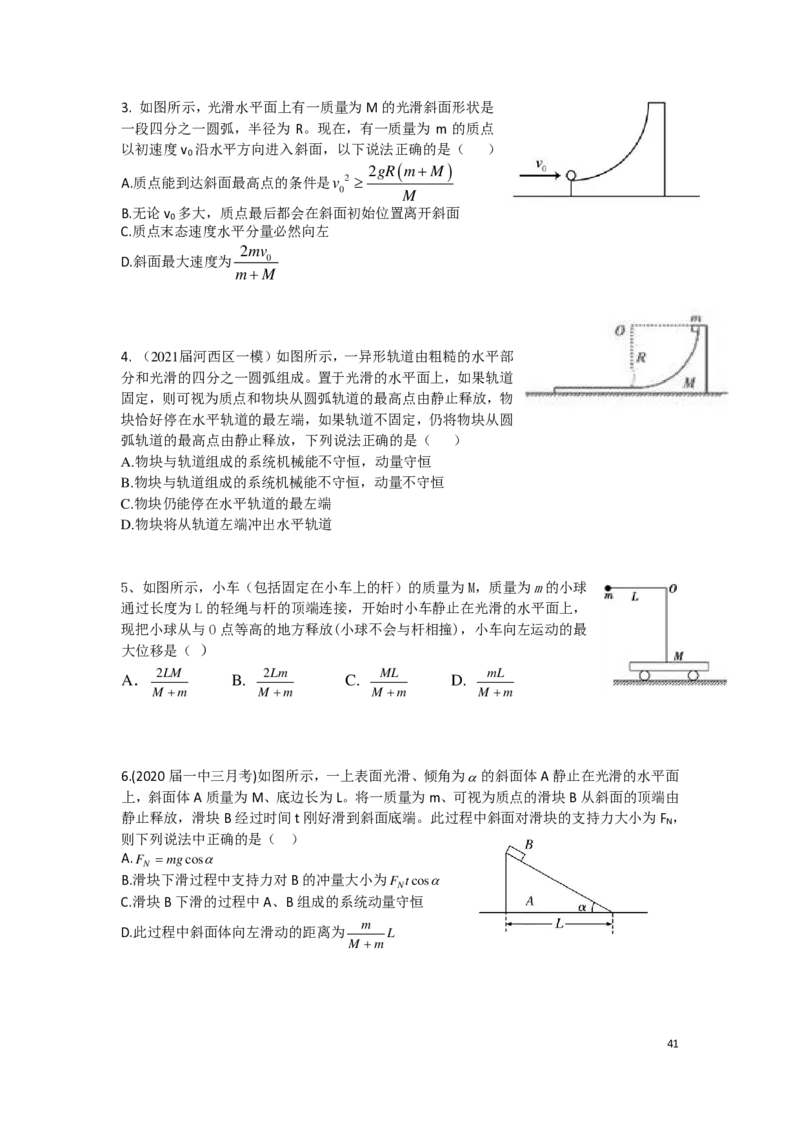
403. 如图所示,光滑水平面上有一质量为M的光滑斜面形状是
一段四分之一圆弧,半径为 R。现在,有一质量为 m 的质点
以初速度v 沿水平方向进入斜面,以下说法正确的是( )
0
2gR ( m+M )
A.质点能到达斜面最高点的条件是v 2 ≥
0 M
B.无论v 多大,质点最后都会在斜面初始位置离开斜面
0
C.质点末态速度水平分量必然向左
2mv
D.斜面最大速度为 0
m+M
4. (2021届河西区一模)如图所示,一异形轨道由粗糙的水平部
分和光滑的四分之一圆弧组成。置于光滑的水平面上,如果轨道
固定,则可视为质点和物块从圆弧轨道的最高点由静止释放,物
块恰好停在水平轨道的最左端,如果轨道不固定,仍将物块从圆
弧轨道的最高点由静止释放,下列说法正确的是( )
A.物块与轨道组成的系统机械能不守恒,动量守恒
B.物块与轨道组成的系统机械能不守恒,动量不守恒
C.物块仍能停在水平轨道的最左端
D.物块将从轨道左端冲出水平轨道
5、如图所示,小车(包括固定在小车上的杆)的质量为M,质量为m的小球
通过长度为L的轻绳与杆的顶端连接,开始时小车静止在光滑的水平面上,
现把小球从与O点等高的地方释放(小球不会与杆相撞),小车向左运动的最
大位移是( )
A. 2LM B. 2Lm C. ML D. mL
M +m M +m M +m M +m
6.(2020届一中三月考)如图所示,一上表面光滑、倾角为α的斜面体A静止在光滑的水平面
上,斜面体A质量为M、底边长为L。将一质量为m、可视为质点的滑块B从斜面的顶端由
静止释放,滑块B经过时间t刚好滑到斜面底端。此过程中斜面对滑块的支持力大小为F ,
N
则下列说法中正确的是( )
A.F =mgcosα
N
B.滑块下滑过程中支持力对B的冲量大小为F tcosα
N
C.滑块B下滑的过程中A、B组成的系统动量守恒
m
D.此过程中斜面体向左滑动的距离为 L
M +m
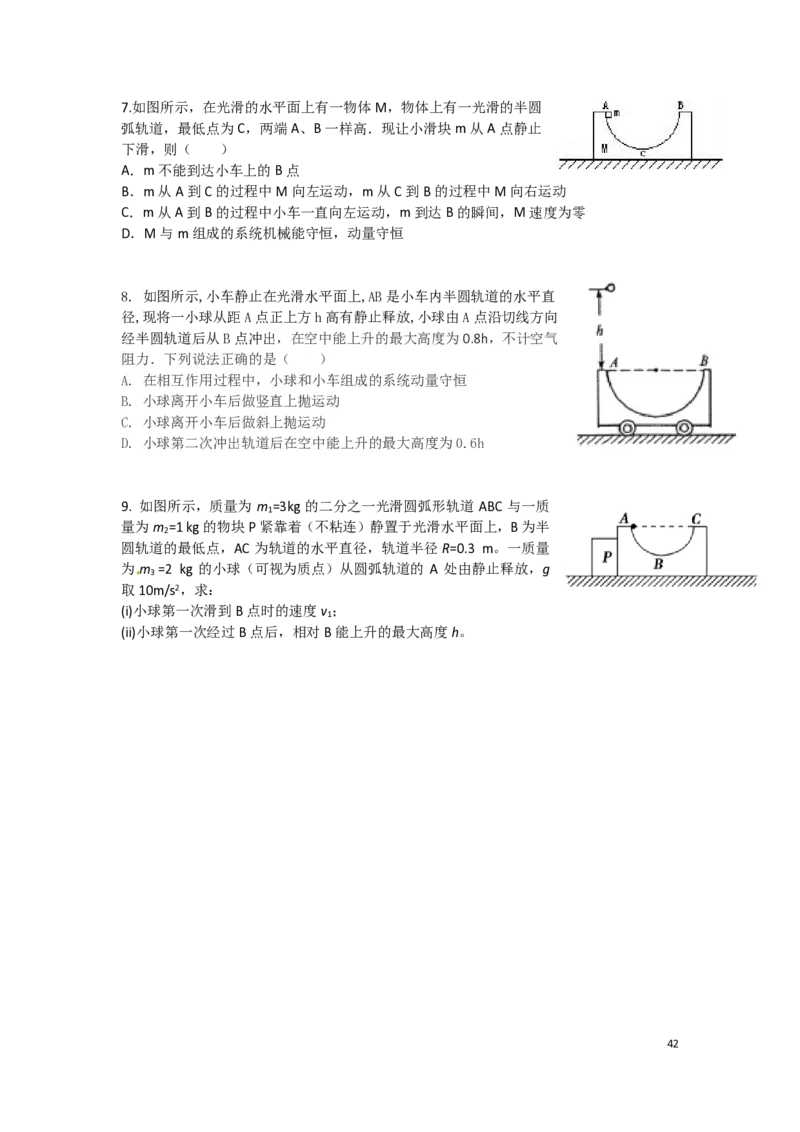
417.如图所示,在光滑的水平面上有一物体M,物体上有一光滑的半圆
弧轨道,最低点为C,两端A、B一样高.现让小滑块m从A点静止
下滑,则( )
A.m不能到达小车上的B点
B.m从A到C的过程中M向左运动,m从C到B的过程中M向右运动
C.m从A到B的过程中小车一直向左运动,m到达B的瞬间,M速度为零
D.M与m组成的系统机械能守恒,动量守恒
8. 如图所示,小车静止在光滑水平面上,AB是小车内半圆轨道的水平直
径,现将一小球从距A点正上方h高有静止释放,小球由A点沿切线方向
经半圆轨道后从B点冲出,在空中能上升的最大高度为0.8h,不计空气
阻力.下列说法正确的是( )
A. 在相互作用过程中,小球和小车组成的系统动量守恒
B. 小球离开小车后做竖直上抛运动
C. 小球离开小车后做斜上抛运动
D. 小球第二次冲出轨道后在空中能上升的最大高度为0.6h
9. 如图所示,质量为 m =3kg 的二分之一光滑圆弧形轨道 ABC 与一质
1
量为m =1 kg的物块P紧靠着(不粘连)静置于光滑水平面上,B为半
2
圆轨道的最低点,AC 为轨道的水平直径,轨道半径 R=0.3 m。一质量
为m =2 kg 的小球(可视为质点)从圆弧轨道的 A 处由静止释放,g
3
取10m/s2,求:
(i)小球第一次滑到B点时的速度v ;
1
(ii)小球第一次经过B点后,相对B能上升的最大高度h。
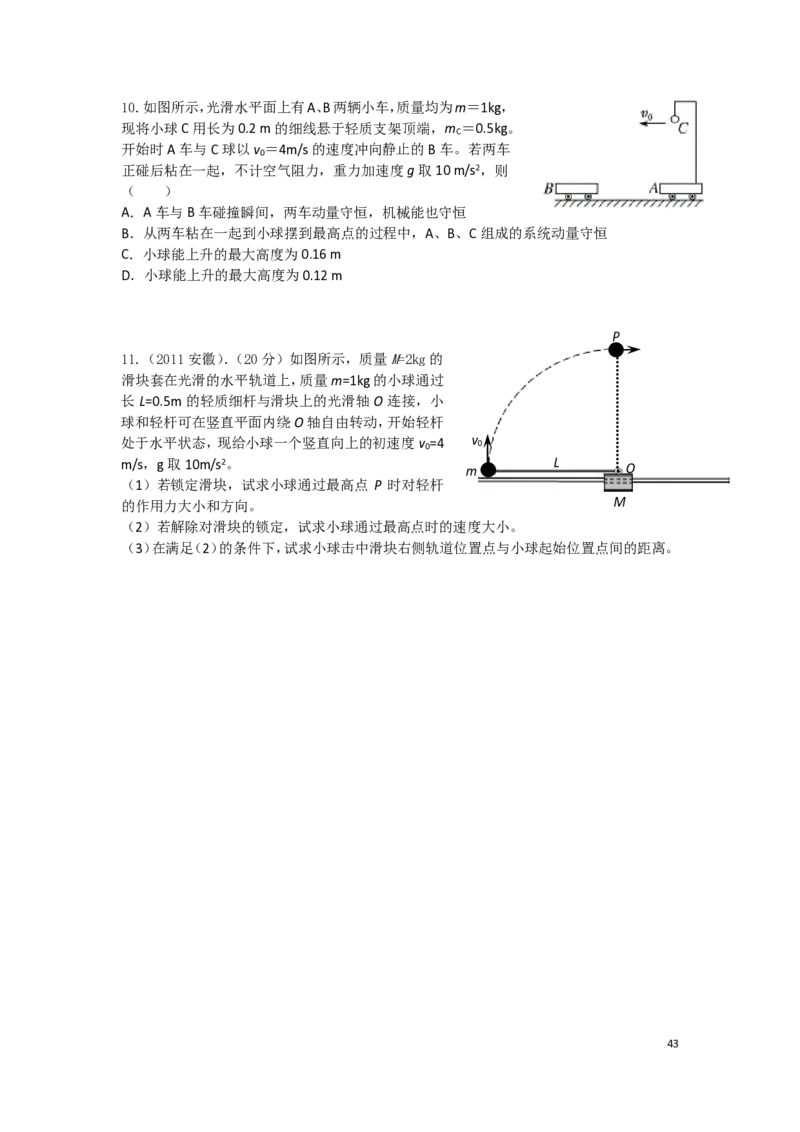
4210.如图所示,光滑水平面上有A、B两辆小车,质量均为m=1kg,
现将小球C用长为0.2 m的细线悬于轻质支架顶端,m =0.5kg。
C
开始时A车与C球以v =4m/s的速度冲向静止的B车。若两车
0
正碰后粘在一起,不计空气阻力,重力加速度g取10 m/s2,则
( )
A.A车与B车碰撞瞬间,两车动量守恒,机械能也守恒
B.从两车粘在一起到小球摆到最高点的过程中,A、B、C组成的系统动量守恒
C.小球能上升的最大高度为0.16 m
D.小球能上升的最大高度为0.12 m
P
11.(2011安徽).(20分)如图所示,质量M=2kg的
滑块套在光滑的水平轨道上,质量m=1kg的小球通过
长 L=0.5m 的轻质细杆与滑块上的光滑轴 O 连接,小
球和轻杆可在竖直平面内绕O轴自由转动,开始轻杆
处于水平状态,现给小球一个竖直向上的初速度v 0 =4 v 0
m/s,g取10m/s2。
m
L
O
(1)若锁定滑块,试求小球通过最高点 P 时对轻杆
的作用力大小和方向。 M
(2)若解除对滑块的锁定,试求小球通过最高点时的速度大小。
(3)在满足(2)的条件下,试求小球击中滑块右侧轨道位置点与小球起始位置点间的距离。
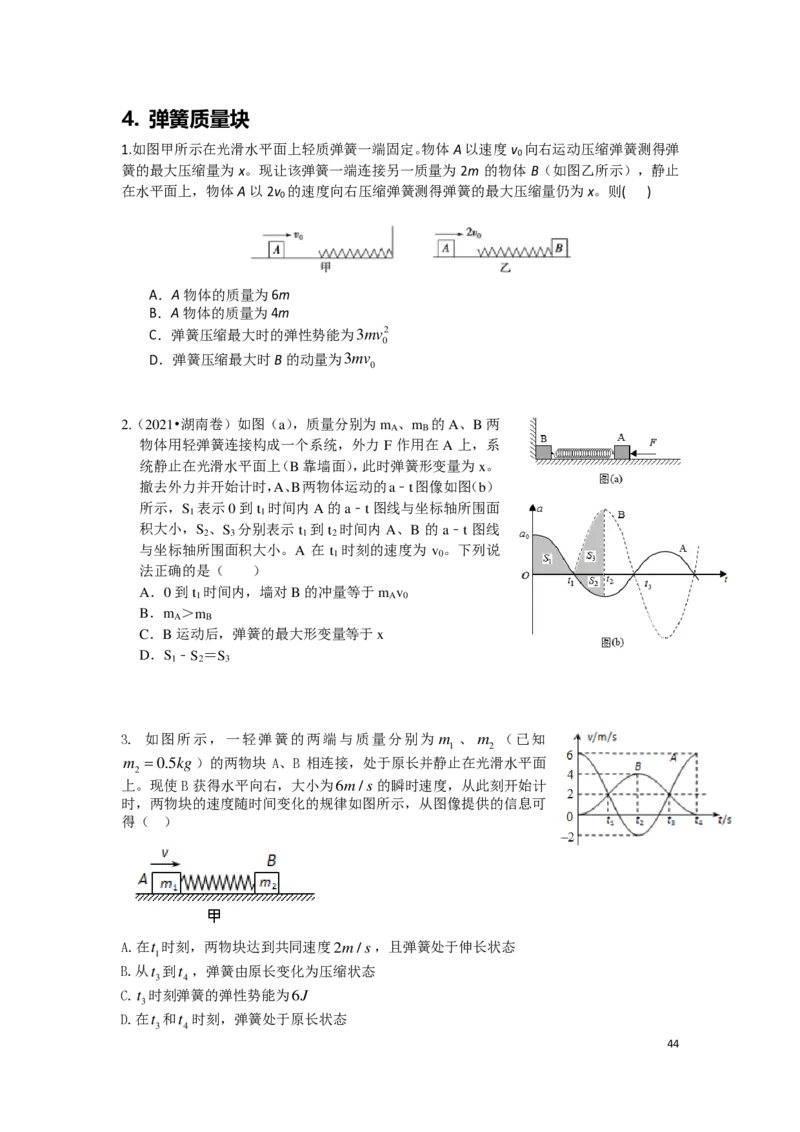
434. 弹簧质量块
1.如图甲所示在光滑水平面上轻质弹簧一端固定。物体A以速度v 向右运动压缩弹簧测得弹
0
簧的最大压缩量为 x。现让该弹簧一端连接另一质量为 2m 的物体 B(如图乙所示),静止
在水平面上,物体A以2v 的速度向右压缩弹簧测得弹簧的最大压缩量仍为x。则( )
0
A.A物体的质量为6m
B.A物体的质量为4m
C.弹簧压缩最大时的弹性势能为3mv2
0
D.弹簧压缩最大时B的动量为3mv
0
2.(2021•湖南卷)如图(a),质量分别为m 、m 的A、B两
A B
物体用轻弹簧连接构成一个系统,外力 F 作用在 A 上,系
统静止在光滑水平面上(B靠墙面),此时弹簧形变量为x。
撤去外力并开始计时,A、B两物体运动的a﹣t图像如图(b)
所示,S 表示0到t 时间内A的a﹣t图线与坐标轴所围面
1 1
积大小,S 、S 分别表示 t 到 t 时间内 A、B 的 a﹣t 图线
2 3 1 2
与坐标轴所围面积大小。A 在 t 时刻的速度为 v 。下列说
1 0
法正确的是( )
A.0到t 时间内,墙对B的冲量等于m v
1 A 0
B.m >m
A B
C.B运动后,弹簧的最大形变量等于x
D.S ﹣S =S
1 2 3
3. 如图所示,一轻弹簧的两端与质量分别为 m 、 m (已知
1 2
m =0.5kg)的两物块 A、B 相连接,处于原长并静止在光滑水平面
2
上。现使B获得水平向右,大小为6m/s的瞬时速度,从此刻开始计
时,两物块的速度随时间变化的规律如图所示,从图像提供的信息可
得( )
A.在t 时刻,两物块达到共同速度2m/s,且弹簧处于伸长状态
1
B.从t 到t ,弹簧由原长变化为压缩状态
3 4
C.t 时刻弹簧的弹性势能为6J
3
D.在t 和t 时刻,弹簧处于原长状态
3 4
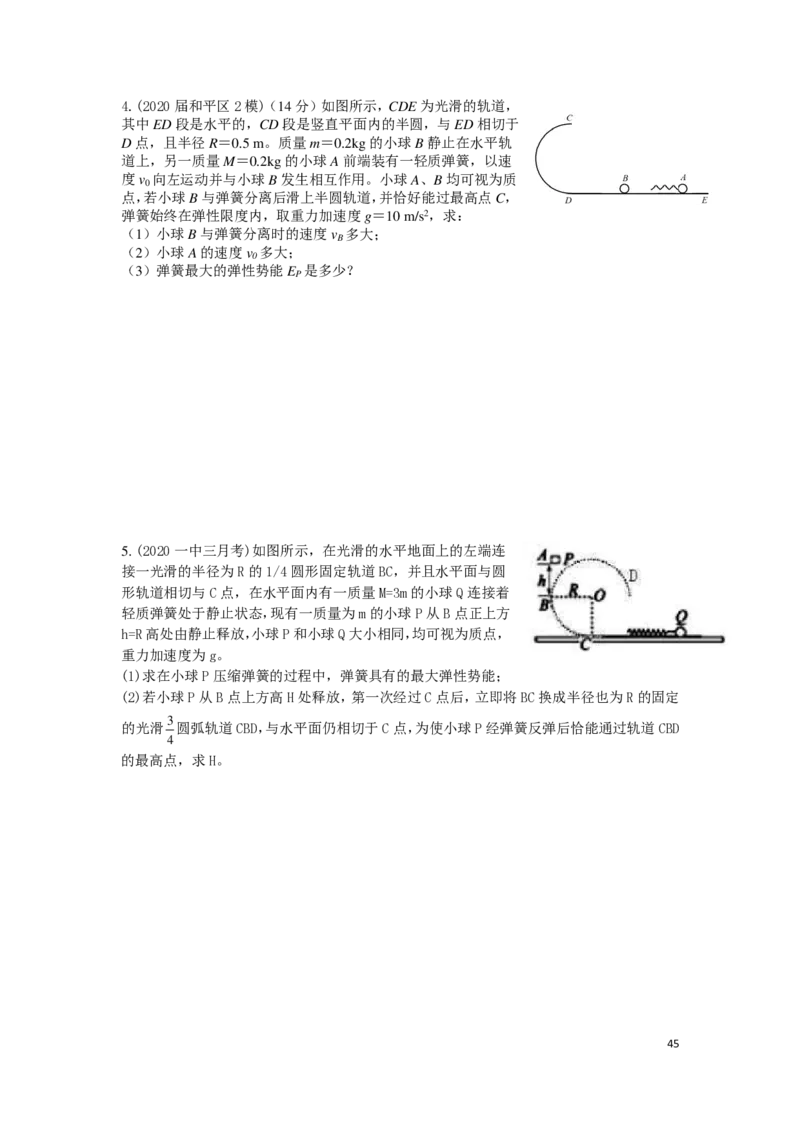
444.(2020届和平区2模)(14分)如图所示,CDE为光滑的轨道,
其中ED段是水平的,CD段是竖直平面内的半圆,与ED相切于
D点,且半径R=0.5 m。质量m=0.2kg的小球B静止在水平轨
道上,另一质量M=0.2kg的小球A前端装有一轻质弹簧,以速
度v 向左运动并与小球B发生相互作用。小球A、B均可视为质
0
点,若小球B与弹簧分离后滑上半圆轨道,并恰好能过最高点C,
弹簧始终在弹性限度内,取重力加速度g=10 m/s2,求:
(1)小球B与弹簧分离时的速度v 多大;
B
(2)小球A的速度v 多大;
0
(3)弹簧最大的弹性势能E 是多少?
P
5. (2020一中三月考)如图所示,在光滑的水平地面上的左端连
接一光滑的半径为R的1/4圆形固定轨道BC,并且水平面与圆
形轨道相切与C点,在水平面内有一质量M=3m的小球Q连接着
轻质弹簧处于静止状态,现有一质量为m的小球P从B点正上方
h=R高处由静止释放,小球P和小球Q大小相同,均可视为质点,
重力加速度为g。
(1)求在小球P压缩弹簧的过程中,弹簧具有的最大弹性势能;
(2)若小球P从B点上方高H处释放,第一次经过C点后,立即将BC换成半径也为R的固定
3
的光滑 圆弧轨道CBD,与水平面仍相切于C点,为使小球P经弹簧反弹后恰能通过轨道CBD
4
的最高点,求H。
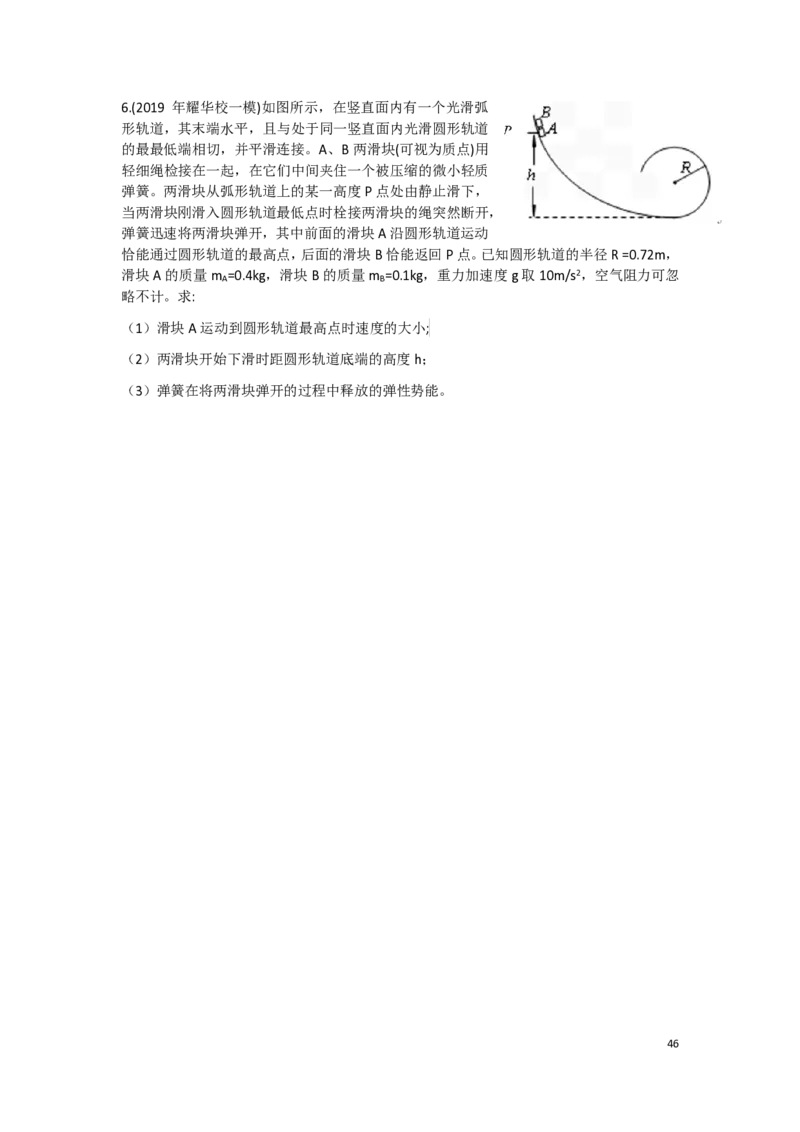
456.(2019 年耀华校一模)如图所示,在竖直面内有一个光滑弧
形轨道,其末端水平,且与处于同一竖直面内光滑圆形轨道
的最最低端相切,并平滑连接。A、B 两滑块(可视为质点)用
轻细绳检接在一起,在它们中间夹住一个被压缩的微小轻质
弹簧。两滑块从弧形轨道上的某一高度P点处由静止滑下,
当两滑块刚滑入圆形轨道最低点时栓接两滑块的绳突然断开,
弹簧迅速将两滑块弹开,其中前面的滑块A沿圆形轨道运动
恰能通过圆形轨道的最高点,后面的滑块B恰能返回P点。已知圆形轨道的半径R =0.72m,
滑块A的质量m =0.4kg,滑块B的质量m =0.1kg,重力加速度g取10m/s2,空气阻力可忽
A B
略不计。求:
(1)滑块A运动到圆形轨道最高点时速度的大小;
(2)两滑块开始下滑时距圆形轨道底端的高度h;
(3)弹簧在将两滑块弹开的过程中释放的弹性势能。
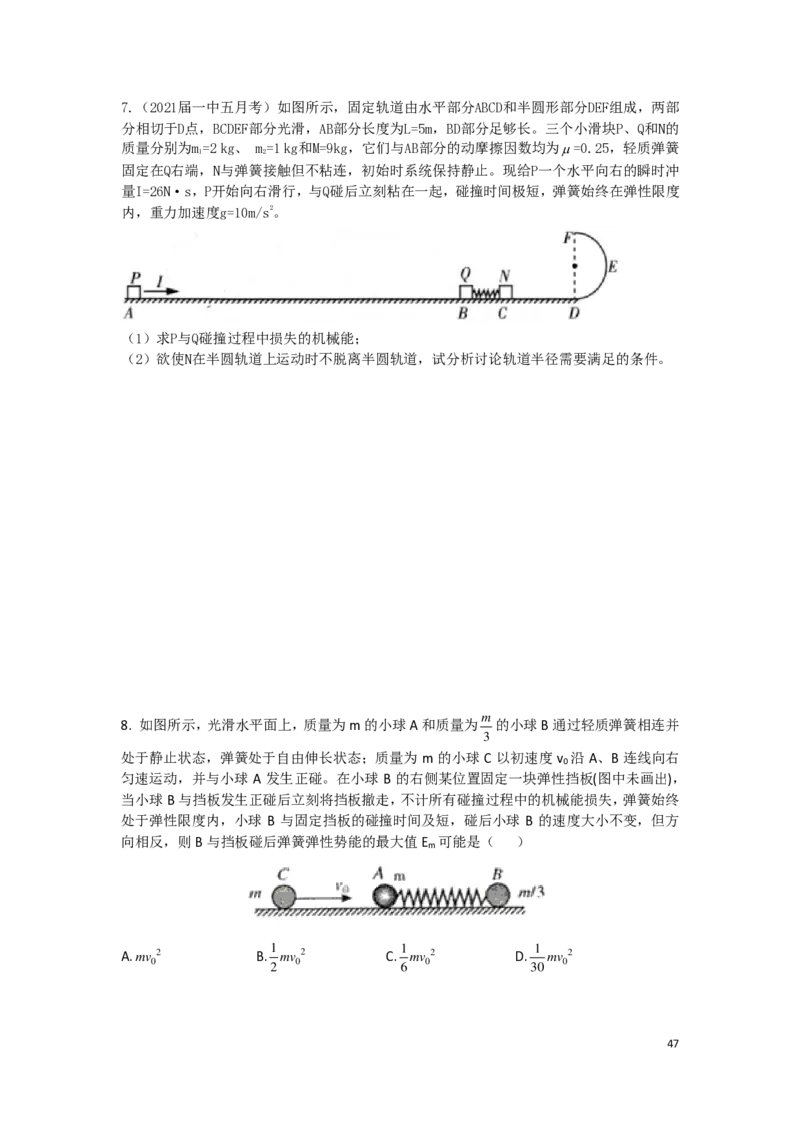
467.(2021届一中五月考)如图所示,固定轨道由水平部分ABCD和半圆形部分DEF组成,两部
分相切于D点,BCDEF部分光滑,AB部分长度为L=5m,BD部分足够长。三个小滑块P、Q和N的
质量分别为m=2 kg、 m=1 kg和M=9kg,它们与AB部分的动摩擦因数均为µ=0.25,轻质弹簧
1 2
固定在Q右端,N与弹簧接触但不粘连,初始时系统保持静止。现给P一个水平向右的瞬时冲
量I=26N·s,P开始向右滑行,与Q碰后立刻粘在一起,碰撞时间极短,弹簧始终在弹性限度
内,重力加速度g=10m/s2。
(1)求P与Q碰撞过程中损失的机械能;
(2)欲使N在半圆轨道上运动时不脱离半圆轨道,试分析讨论轨道半径需要满足的条件。
[来源:Z#xx#k.Com]
m
8. 如图所示,光滑水平面上,质量为m的小球A和质量为 的小球B通过轻质弹簧相连并
3
处于静止状态,弹簧处于自由伸长状态;质量为 m 的小球 C 以初速度 v 沿 A、B 连线向右
0
匀速运动,并与小球 A 发生正碰。在小球 B 的右侧某位置固定一块弹性挡板(图中未画出),
当小球B与挡板发生正碰后立刻将挡板撤走,不计所有碰撞过程中的机械能损失,弹簧始终
处于弹性限度内,小球 B 与固定挡板的碰撞时间及短,碰后小球 B 的速度大小不变,但方
向相反,则B与挡板碰后弹簧弹性势能的最大值E 可能是( )
m
1 1 1
A.mv 2 B. mv 2 C. mv 2 D. mv 2
0 0 0 0
2 6 30
475. 绷绳子模型
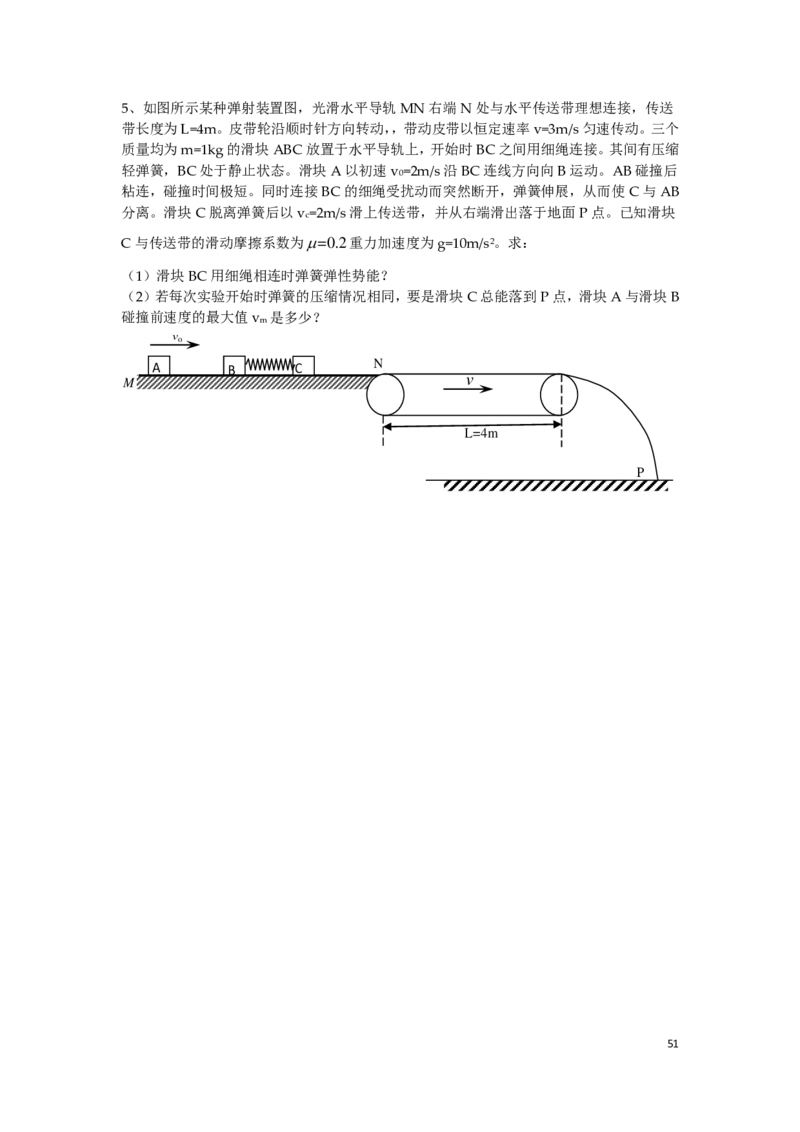
486.动量和传动带结合
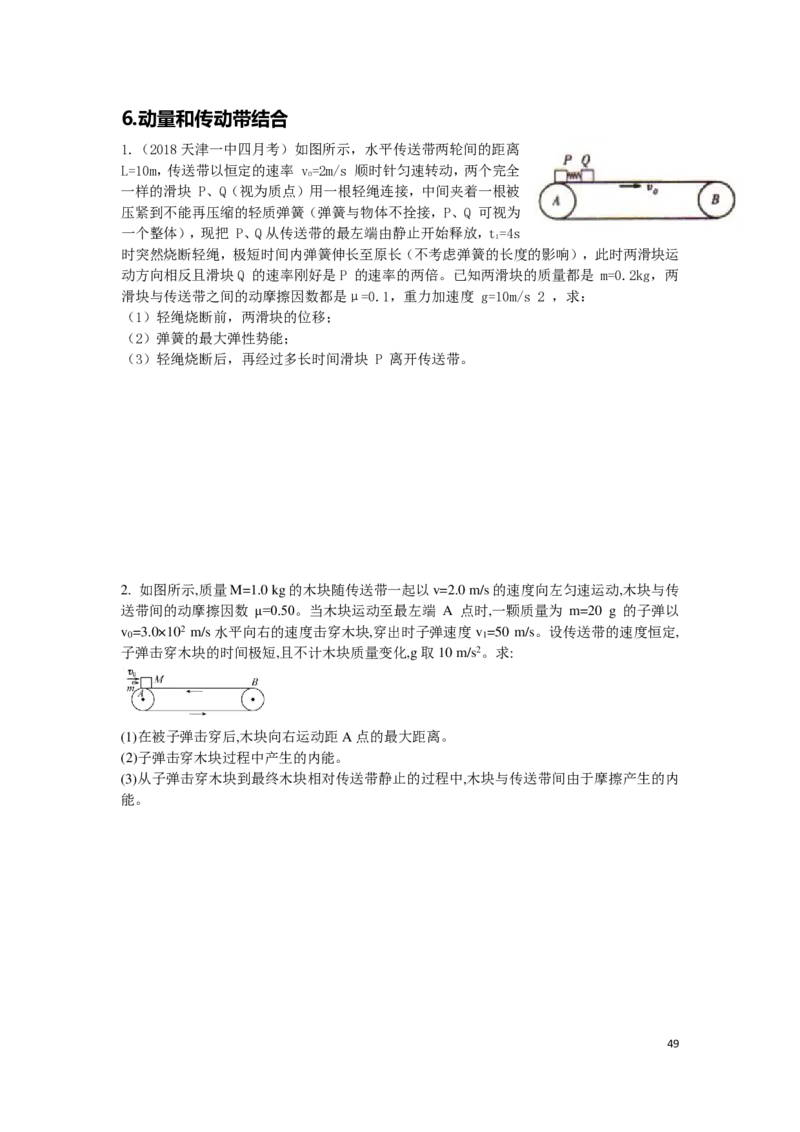
1.(2018天津一中四月考)如图所示,水平传送带两轮间的距离
L=10m,传送带以恒定的速率 v=2m/s 顺时针匀速转动,两个完全
0
一样的滑块 P、Q(视为质点)用一根轻绳连接,中间夹着一根被
压紧到不能再压缩的轻质弹簧(弹簧与物体不拴接,P、Q 可视为
一个整体),现把 P、Q从传送带的最左端由静止开始释放,t=4s
1
时突然烧断轻绳,极短时间内弹簧伸长至原长(不考虑弹簧的长度的影响),此时两滑块运
动方向相反且滑块Q 的速率刚好是P 的速率的两倍。已知两滑块的质量都是 m=0.2kg,两
滑块与传送带之间的动摩擦因数都是μ=0.1,重力加速度 g=10m/s 2 ,求:
(1)轻绳烧断前,两滑块的位移;
(2)弹簧的最大弹性势能;
(3)轻绳烧断后,再经过多长时间滑块 P 离开传送带。
2. 如图所示,质量M=1.0 kg的木块随传送带一起以v=2.0 m/s的速度向左匀速运动,木块与传
送带间的动摩擦因数 μ=0.50。当木块运动至最左端 A 点时,一颗质量为 m=20 g 的子弹以
v =3.0×102 m/s水平向右的速度击穿木块,穿出时子弹速度v =50 m/s。设传送带的速度恒定,
0 1
子弹击穿木块的时间极短,且不计木块质量变化,g取10 m/s2。求:
(1)在被子弹击穿后,木块向右运动距A点的最大距离。
(2)子弹击穿木块过程中产生的内能。
(3)从子弹击穿木块到最终木块相对传送带静止的过程中,木块与传送带间由于摩擦产生的内
能。
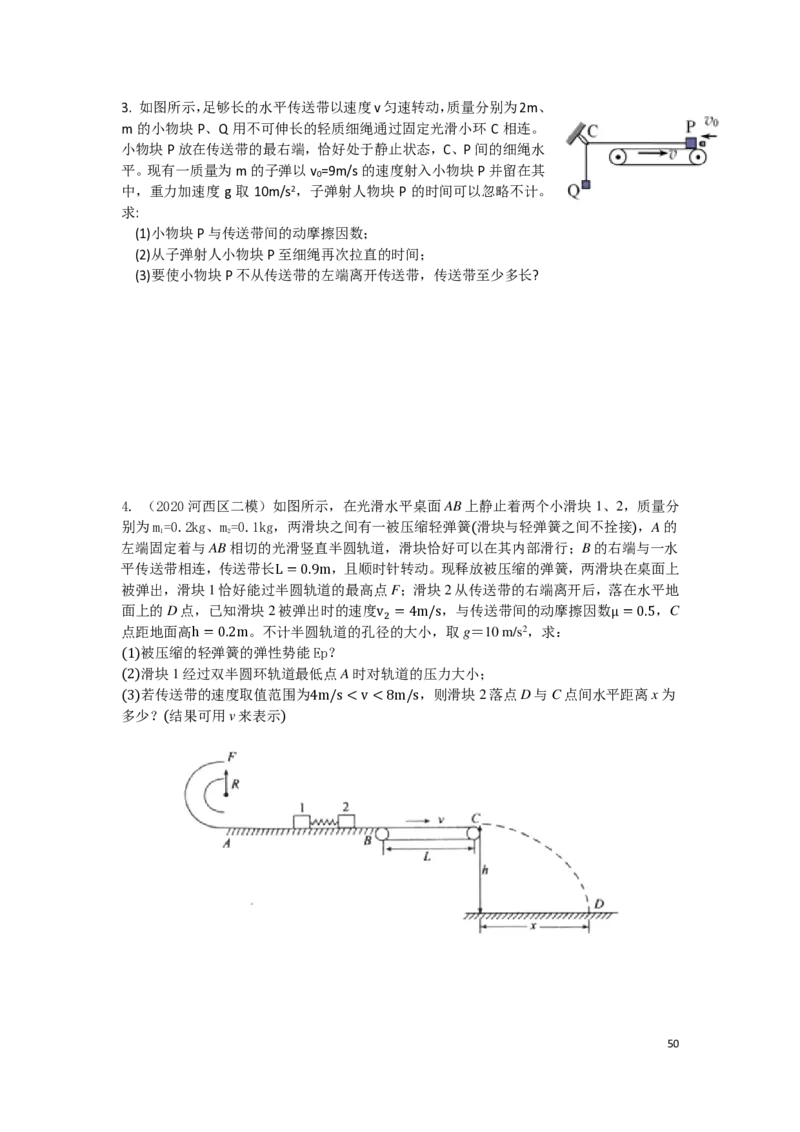
493. 如图所示,足够长的水平传送带以速度v匀速转动,质量分别为2m、
m 的小物块P、Q 用不可伸长的轻质细绳通过固定光滑小环 C 相连。
小物块P放在传送带的最右端,恰好处于静止状态,C、P间的细绳水
平。现有一质量为m的子弹以v =9m/s的速度射入小物块P并留在其
0
中,重力加速度 g 取 10m/s2,子弹射人物块 P 的时间可以忽略不计。
求:
(1)小物块P与传送带间的动摩擦因数;
(2)从子弹射人小物块P至细绳再次拉直的时间;
(3)要使小物块P不从传送带的左端离开传送带,传送带至少多长?
4. (2020河西区二模)如图所示,在光滑水平桌面AB上静止着两个小滑块1、2,质量分
别为m=0.2kg、m=0.1kg,两滑块之间有一被压缩轻弹簧 滑块与轻弹簧之间不拴接 ,A的
1 2
左端固定着与AB相切的光滑竖直半圆轨道,滑块恰好可以在其内部滑行;B的右端与一水
( )
平传送带相连,传送带长 ,且顺时针转动。现释放被压缩的弹簧,两滑块在桌面上
被弹出,滑块1恰好能过半圆轨道的最高点F;滑块2从传送带的右端离开后,落在水平地
L=0.9m
面上的D点,已知滑块2被弹出时的速度 ,与传送带间的动摩擦因数 ,C
点距地面高 。不计半圆轨道的孔径的大小,取g=10 m/s2,求:
v2 =4m/s μ=0.5
被压缩的轻弹簧的弹性势能Ep?
h=0.2m
滑块1经过双半圆环轨道最低点A时对轨道的压力大小;
(1)
若传送带的速度取值范围为 ,则滑块2落点D与C点间水平距离x为
(2)
多少? 结果可用v来表示
(3) 4m/s𝑡𝑡𝑏𝑏 >𝑡𝑡𝑐𝑐 𝑣𝑣𝑎𝑎 >𝑣𝑣𝑐𝑐 >𝑣𝑣𝑏𝑏 𝑡𝑡𝑎𝑎 >𝑡𝑡𝑏𝑏 >𝑡𝑡𝑐𝑐 𝑣𝑣𝑏𝑏 >𝑣𝑣𝑐𝑐 >𝑣𝑣𝑎𝑎
𝑡𝑡𝑏𝑏 >𝑡𝑡𝑐𝑐 >𝑡𝑡𝑎𝑎 𝑣𝑣𝑏𝑏 >𝑣𝑣𝑐𝑐 >𝑣𝑣𝑎𝑎 𝑡𝑡𝑏𝑏 >𝑡𝑡𝑐𝑐 >𝑡𝑡𝑎𝑎 𝑣𝑣𝑎𝑎 >𝑣𝑣𝑐𝑐 >𝑣𝑣𝑏𝑏
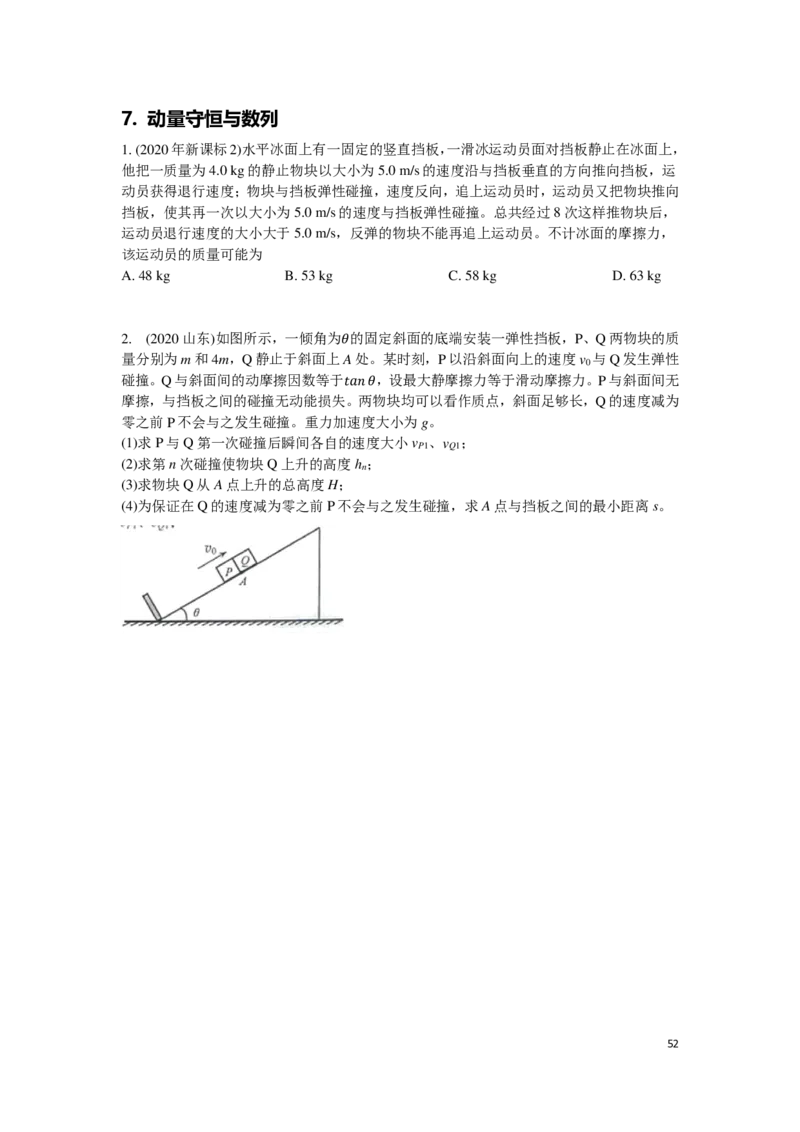
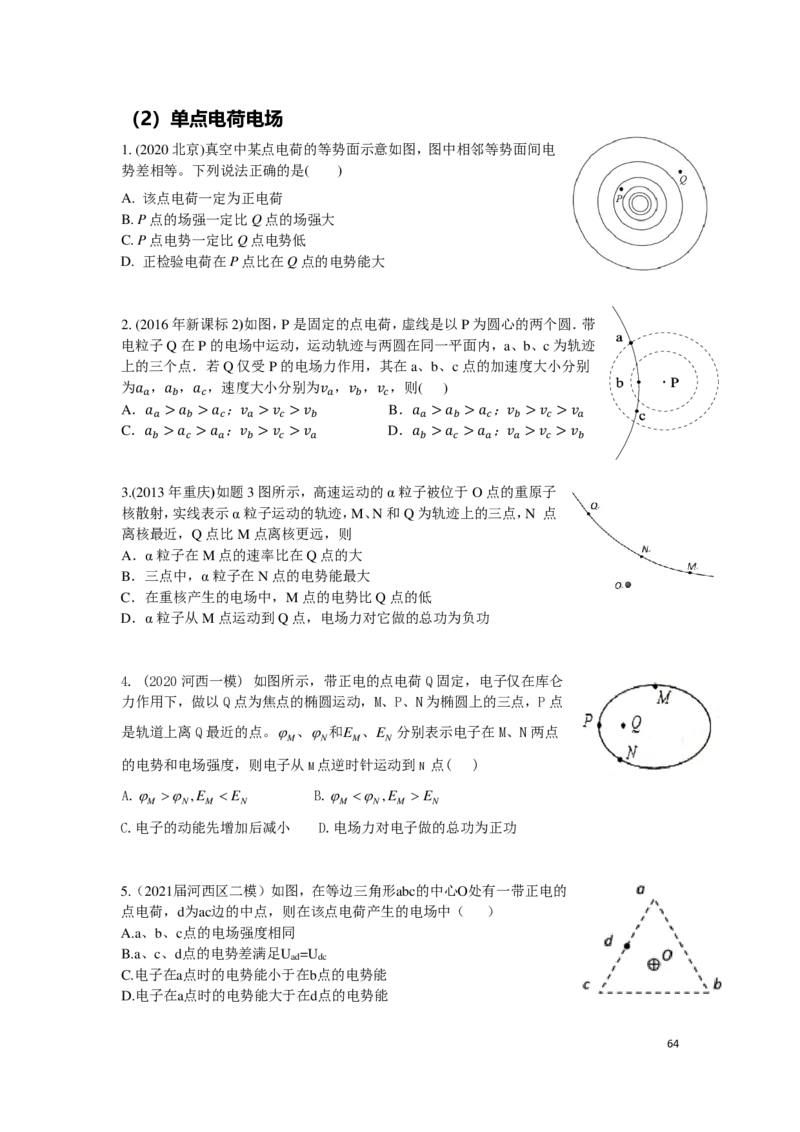
3.(2013年重庆)如题3图所示,高速运动的α粒子被位于O点的重原子
核散射,实线表示α粒子运动的轨迹,M、N和Q为轨迹上的三点,N 点
离核最近,Q点比M点离核更远,则
A.α粒子在M点的速率比在Q点的大
B.三点中,α粒子在N点的电势能最大
C.在重核产生的电场中,M点的电势比Q点的低
D.α粒子从M点运动到Q点,电场力对它做的总功为负功
4. (2020河西一模) 如图所示,带正电的点电荷Q固定,电子仅在库仑
力作用下,做以Q点为焦点的椭圆运动,M、P、N为椭圆上的三点,P点
是轨道上离Q最近的点。ϕ 、ϕ 和E 、E 分别表示电子在M、N两点
M N M N
的电势和电场强度,则电子从M点逆时针运动到N 点( )
A.ϕ >ϕ ,E E
M N M N M N M N
C.电子的动能先增加后减小 D.电场力对电子做的总功为正功
5.(2021届河西区二模)如图,在等边三角形abc的中心O处有一带正电的
点电荷,d为ac边的中点,则在该点电荷产生的电场中( )
A.a、b、c点的电场强度相同
B.a、c、d点的电势差满足U =U
ad dc
C.电子在a点时的电势能小于在b点的电势能
D.电子在a点时的电势能大于在d点的电势能
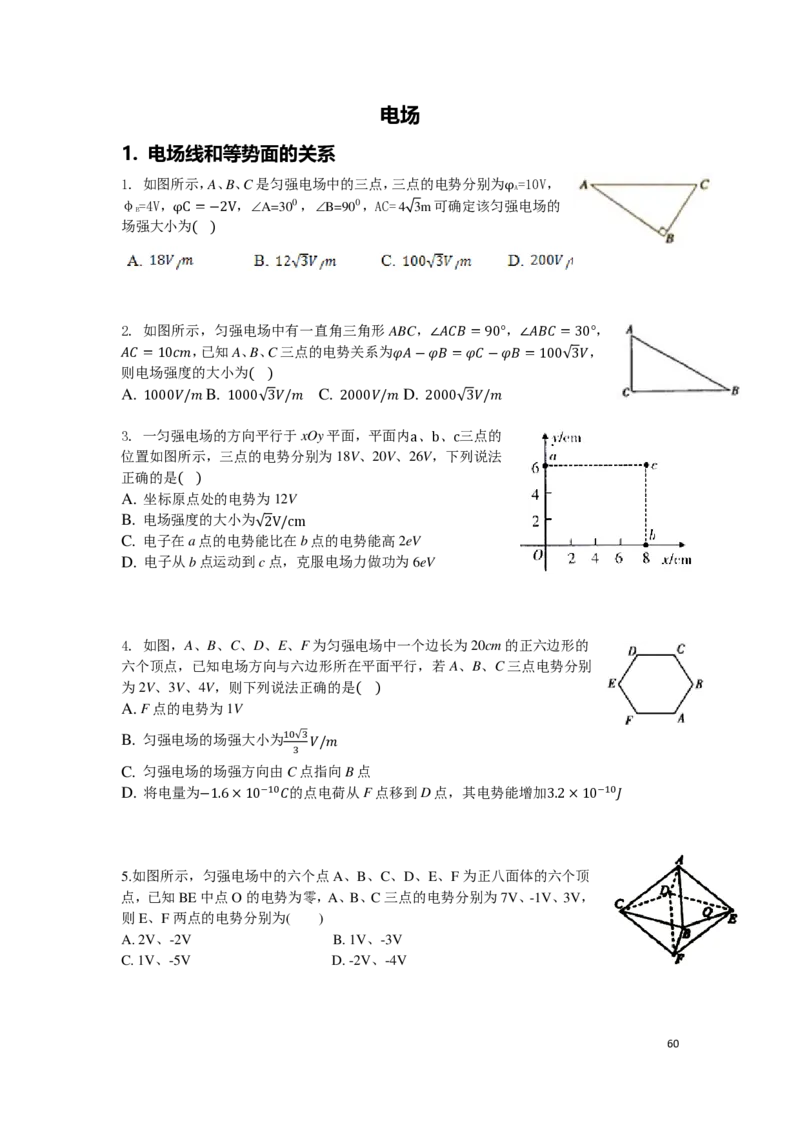
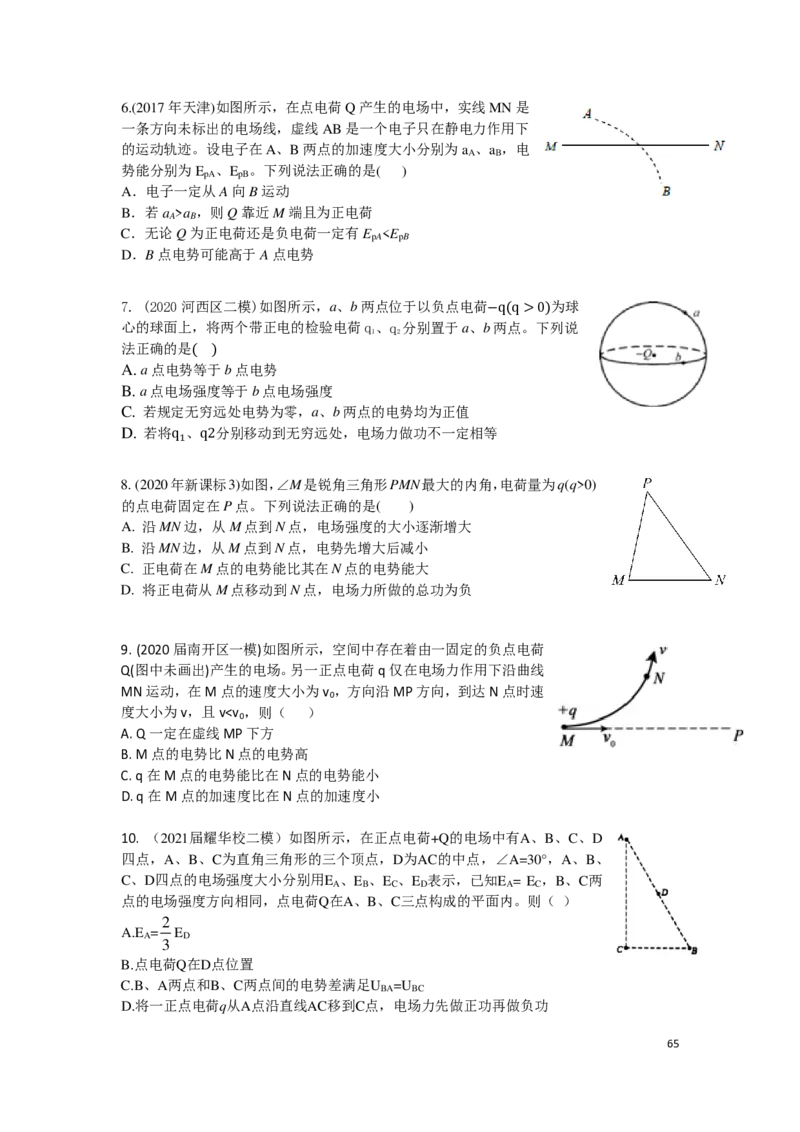
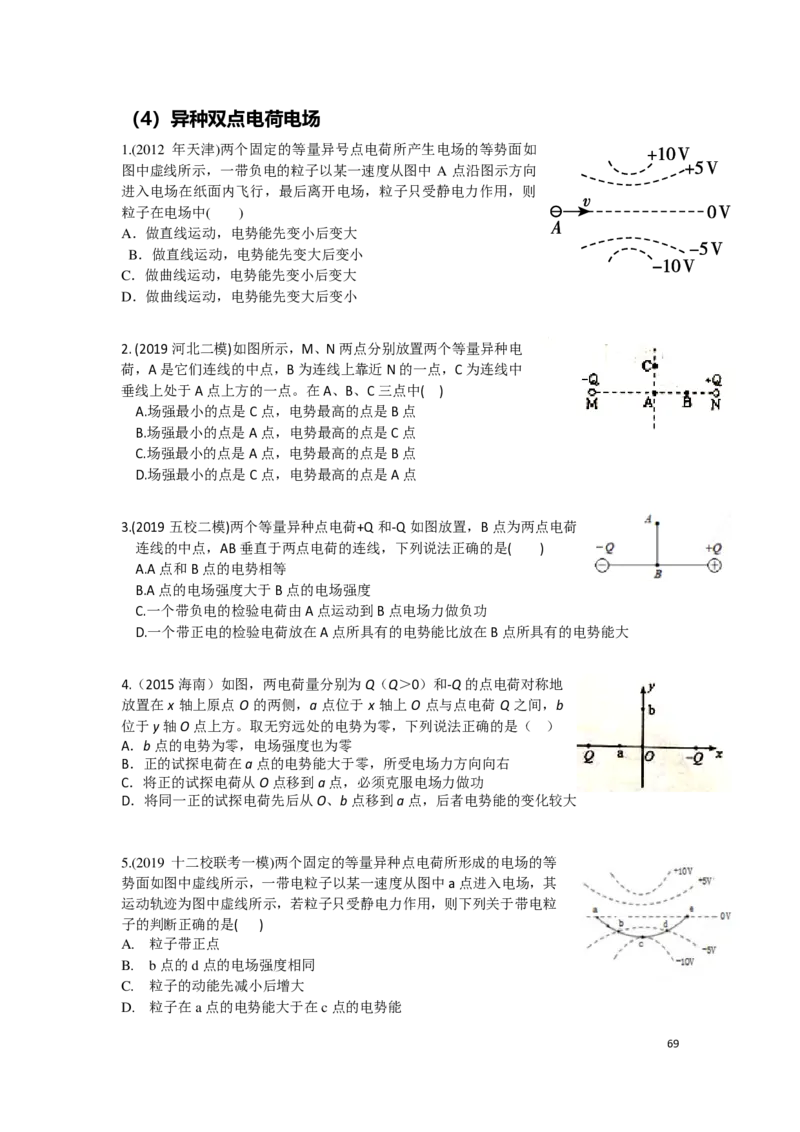
646.(2017年天津)如图所示,在点电荷Q产生的电场中,实线MN是
一条方向未标出的电场线,虚线AB是一个电子只在静电力作用下
的运动轨迹。设电子在A、B两点的加速度大小分别为a 、a ,电
A B
势能分别为E 、E 。下列说法正确的是( )
pA pB
A.电子一定从A向B运动
B.若a >a ,则Q靠近M端且为正电荷
A B
C.无论Q为正电荷还是负电荷一定有E 0)
法正确的是
A. a点电势等于b点电势
( )
B. a点电场强度等于b点电场强度
C. 若规定无穷远处电势为零,a、b两点的电势均为正值
D. 若将 、 分别移动到无穷远处,电场力做功不一定相等
q1 q2
8. (2020年新课标3)如图,∠M是锐角三角形PMN最大的内角,电荷量为q(q>0)
的点电荷固定在P点。下列说法正确的是( )
A. 沿MN边,从M点到N点,电场强度的大小逐渐增大
B. 沿MN边,从M点到N点,电势先增大后减小
C. 正电荷在M点的电势能比其在N点的电势能大
D. 将正电荷从M点移动到N点,电场力所做的总功为负
9. (2020届南开区一模)如图所示,空间中存在着由一固定的负点电荷
Q(图中未画出)产生的电场。另一正点电荷q仅在电场力作用下沿曲线
MN运动,在M点的速度大小为v ,方向沿MP方向,到达N点时速
0
度大小为v,且v𝐸𝐸𝐴𝐴
C. 将一带负电粒子由A经B 移至C点过程中,电场力先做负功再
φA =φB >φc
做正功
D. 将一带正电粒子由A经B移至C点过程中,电势能先增大再减小
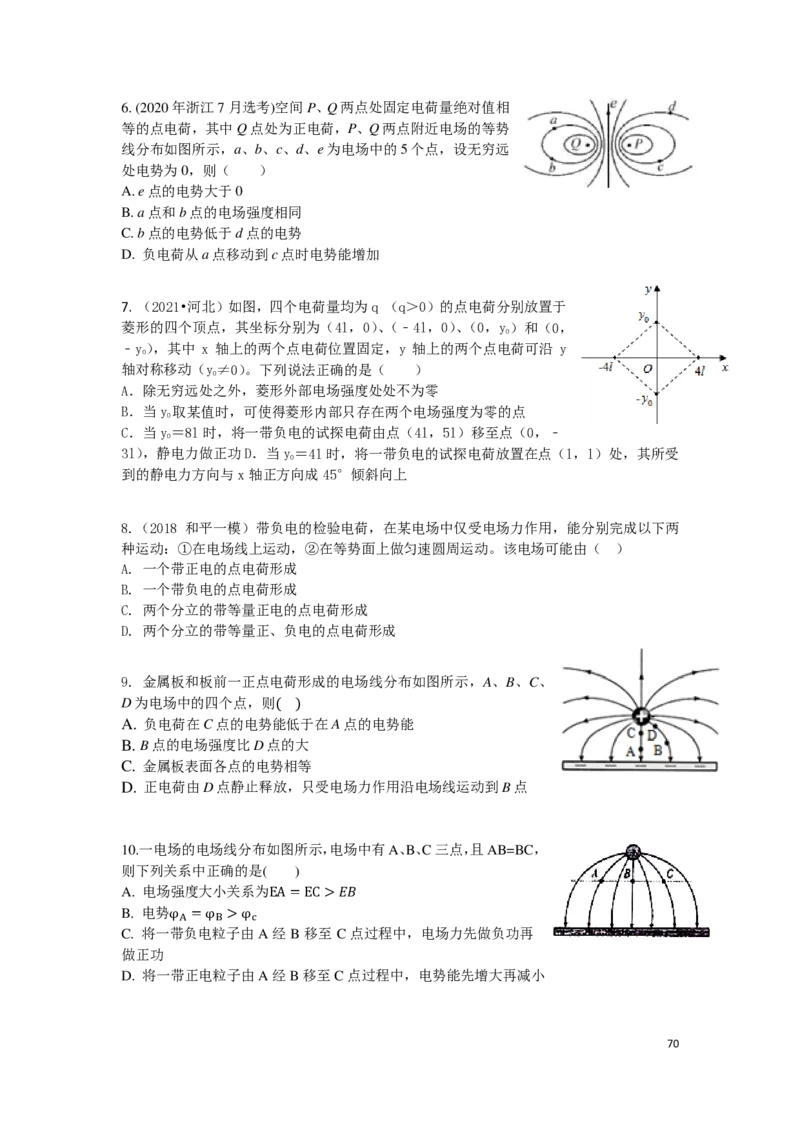
7011. (2013年安徽)如图所示,xOy平面是无穷大导体的表面,该导体充满z<0的空间,z
>0的空间为真空。将电荷为q的点电荷置于z轴上z=h处,则在xOy平面上会产生感应
电荷。空间任意一点处的电场皆是由点电荷q和导体表面上的感应电荷共同激发的。已知
静电平衡时导体内部场强处处为零,则在z 轴上z= 处的场强大小为(k为静电力常量)
h
2
A. B. C. D.
4𝑞𝑞 4𝑞𝑞 32𝑞𝑞 40𝑞𝑞
2 2 2 2
𝑘𝑘ℎ 𝑘𝑘9ℎ 𝑘𝑘9ℎ 𝑘𝑘9ℎ
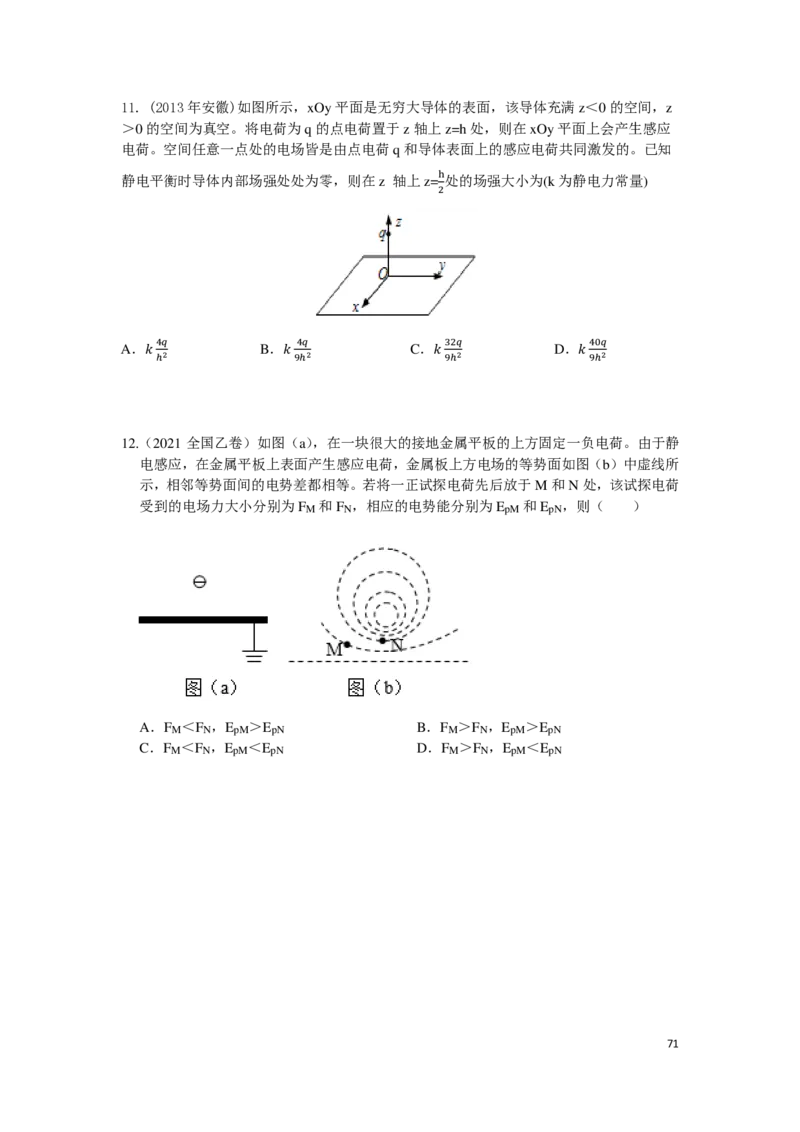
12.(2021 全国乙卷)如图(a),在一块很大的接地金属平板的上方固定一负电荷。由于静
电感应,在金属平板上表面产生感应电荷,金属板上方电场的等势面如图(b)中虚线所
示,相邻等势面间的电势差都相等。若将一正试探电荷先后放于M和N处,该试探电荷
受到的电场力大小分别为FM 和FN ,相应的电势能分别为EpM 和EpN ,则( )
A.FM <FN ,EpM >EpN B.FM >FN ,EpM >EpN
C.FM <FN ,EpM <EpN D.FM >FN ,EpM <EpN
71(5)复合其他力的电场
1、如图所示,O、A、B、C为一粗糙绝缘水平面上的三
点,不计空气阻力,一电荷量为 的点电荷固定在O点,
现有一质量为m、电荷量为 的小金属块 可视为质点 ,
−𝑄𝑄
从A点由静止沿它们的连线向右运动,到B点时速度最
−q ( )
大,其大小为 ,小金属块最后停止在C点.已知小金属块与水平面间的动摩擦因数为 ,
AB间距离为L,静电力常量为k,则
𝑣𝑣𝐺𝐺 μ
( )
A. 在点电荷 形成的电场中,A、B两点间的电势差为
−𝑄𝑄
B. 在小金属块由A向C运动的过程中,电势能先增大后减小
C. OB间的距离为
D. 从B到C的过程中,小金属块的动能全部转化为电势能
2、(2005天津理综)一带电油滴在匀强电场E中的运动轨迹如图所示,
b
电场方向竖直向下。若不计空气阻力,则此带电油滴从 a 运动到 b 的
过程中,能量变化情况为( )
A.动能减小 B.电势能增加
a
C.动能和电势能总和减少
E
D.重力势能和电势能之和增大
3.(2010天津).在静电场中,将一正电荷从a点移到b点,电场力做了负功,则( )
A.b点的电场强度一定比a点大 B.电场线方向一定从b指向a
C.b点的电势一定比a点高 D.该电荷的动能一定减小
4.(2014 天津)如图所示,平行金属板 A、B 水平正对放置,
分别带等量异号电荷。一带电微粒水平射入板间,在重力和电
场力共同作用下运动,轨迹如图中虚线所示,那么( )
A、若微粒带正电荷,则A板一定带正电荷
B、微粒从M点运动到N点电势能一定增加
C、微粒从M点运动到N点动能一定增加
D、微粒从M点运动到N点机械能一定增加
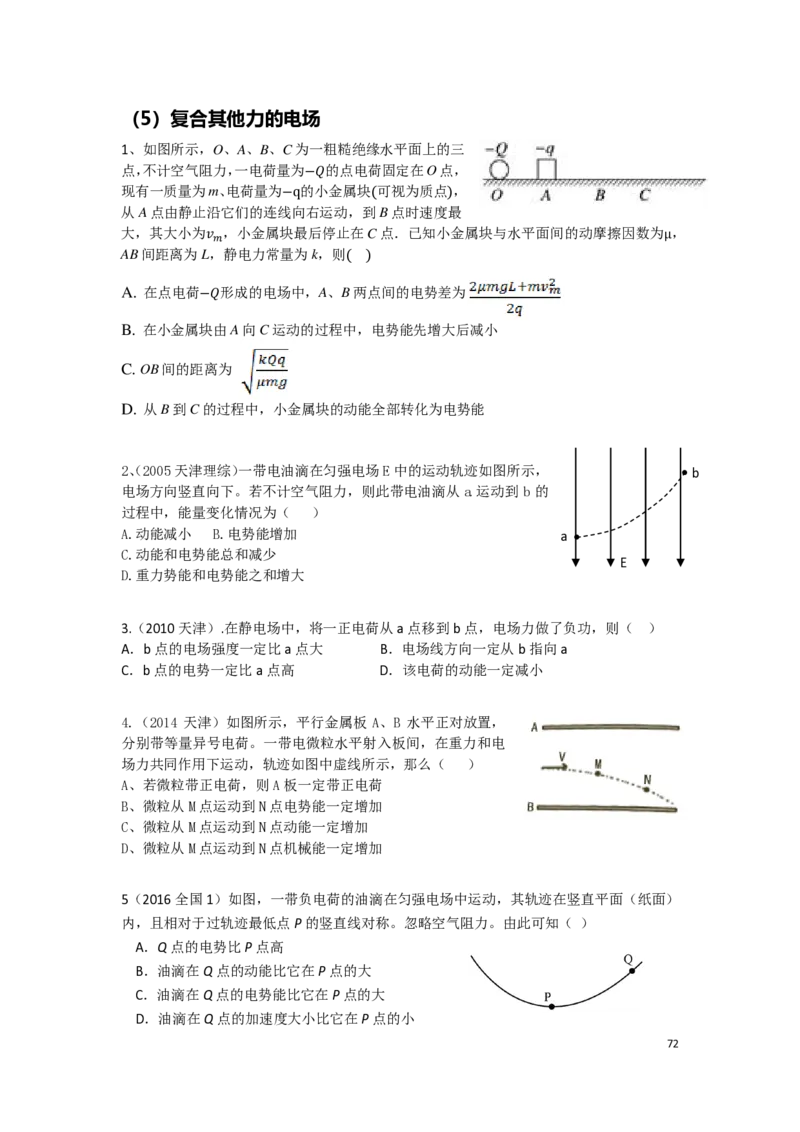
5(2016全国1)如图,一带负电荷的油滴在匀强电场中运动,其轨迹在竖直平面(纸面)
内,且相对于过轨迹最低点P的竖直线对称。忽略空气阻力。由此可知( )
A.Q点的电势比P点高
B.油滴在Q点的动能比它在P点的大
C.油滴在Q点的电势能比它在P点的大
D.油滴在Q点的加速度大小比它在P点的小
726.(2018十二校联考第一次)如图所示,在电场中有一条竖直向下的电场线,
带负电的小球在重力和电场力的作用下,从A点运动到B点。下列说法正确的
是( )
A 小球在B点的速度一定大于A点的速度
B A点的电场强度一定大于B点的电场强度
C 小球在A点的电势能大于在B点的电势能
D 小球在A点的机械能大于在B点的机械能
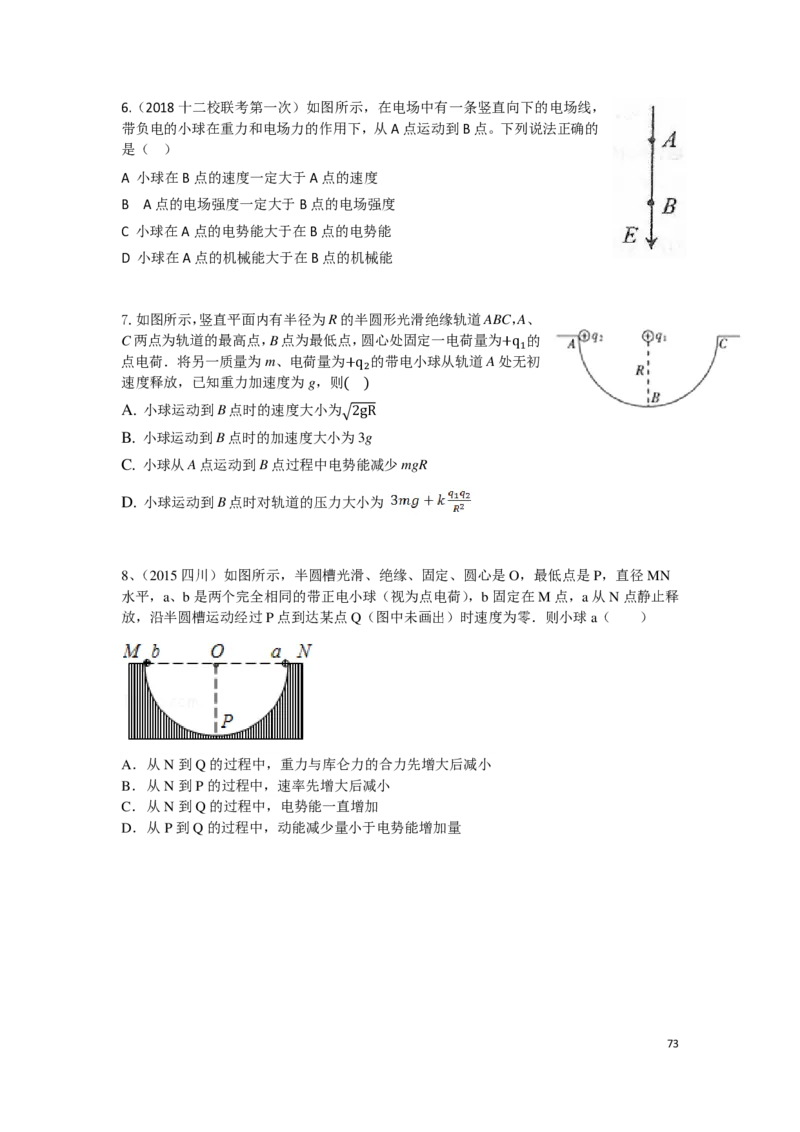
7.如图所示,竖直平面内有半径为R的半圆形光滑绝缘轨道ABC,A、
C两点为轨道的最高点,B点为最低点,圆心处固定一电荷量为 的
点电荷.将另一质量为m、电荷量为 的带电小球从轨道A处无初
+q1
速度释放,已知重力加速度为g,则
+q2
A. 小球运动到B点时的速度大小为
( )
B. 小球运动到B点时的加速度大小为 �23ggR
C. 小球从A点运动到B点过程中电势能减少mgR
D. 小球运动到B点时对轨道的压力大小为
8、(2015四川)如图所示,半圆槽光滑、绝缘、固定、圆心是O,最低点是P,直径MN
水平,a、b是两个完全相同的带正电小球(视为点电荷),b固定在M点,a从N点静止释
放,沿半圆槽运动经过P点到达某点Q(图中未画出)时速度为零.则小球a( )
A. 从N到Q的过程中,重力与库仑力的合力先增大后减小
B. 从N到P的过程中,速率先增大后减小
C. 从N到Q的过程中,电势能一直增加
D. 从P到Q的过程中,动能减少量小于电势能增加量
733.图像专题
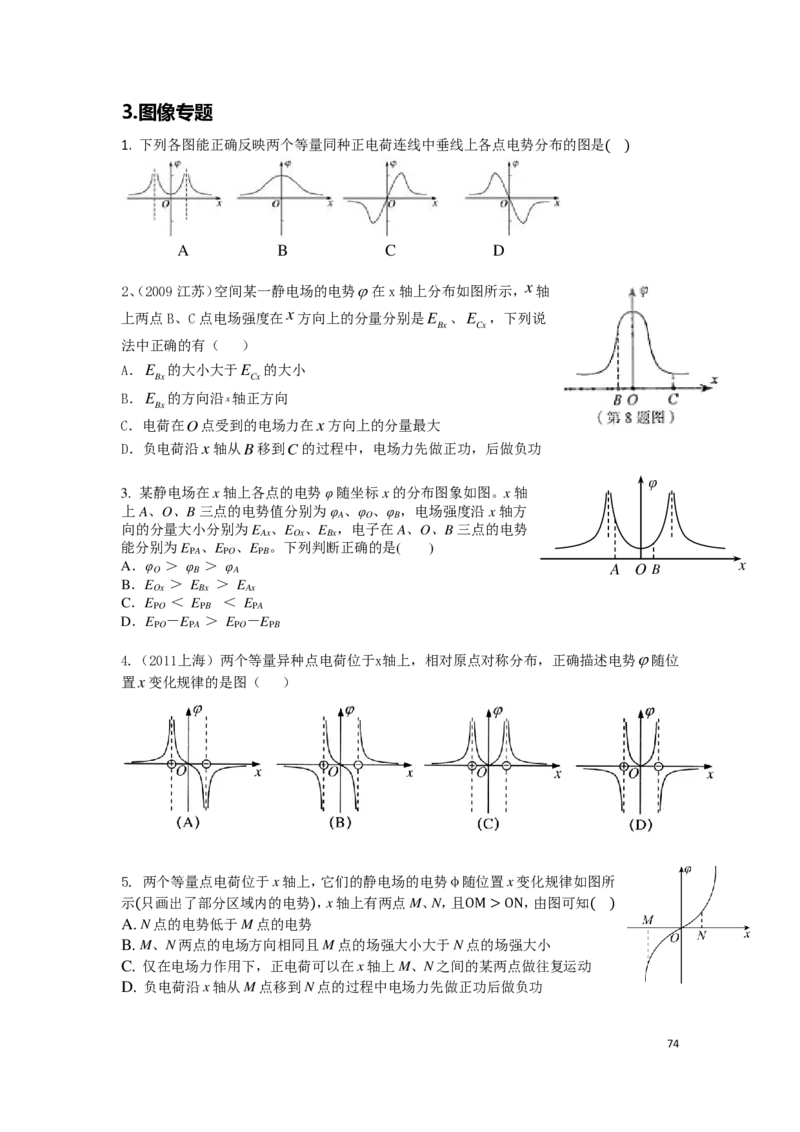
1. 下列各图能正确反映两个等量同种正电荷连线中垂线上各点电势分布的图是
( )
A B C D
2、(2009江苏)空间某一静电场的电势ϕ在x轴上分布如图所示,x轴
上两点B、C点电场强度在x方向上的分量分别是E 、E ,下列说
Bx Cx
法中正确的有( )
A.E 的大小大于E 的大小
Bx Cx
B.E 的方向沿
x
轴正方向
Bx
C.电荷在O点受到的电场力在x方向上的分量最大
D.负电荷沿x轴从B移到C的过程中,电场力先做正功,后做负功
φ
3. 某静电场在x轴上各点的电势φ随坐标x的分布图象如图。x轴
上A、O、B 三点的电势值分别为φ 、φ 、φ ,电场强度沿x轴方
A O B
向的分量大小分别为E 、E 、E ,电子在A、O、B三点的电势
Ax Ox Bx
能分别为E 、E 、E 。下列判断正确的是( )
PA PO PB
A.φ O > φ B > φ A A O B x
B.E > E > E
Ox Bx Ax
C.E < E < E
PO PB PA
D.E -E > E -E
PO PA PO PB
4.(2011上海)两个等量异种点电荷位于x轴上,相对原点对称分布,正确描述电势ϕ随位
置x变化规律的是图( )
5. 两个等量点电荷位于x轴上,它们的静电场的电势φ随位置x变化规律如图所
示 只画出了部分区域内的电势 ,x轴上有两点M、N,且 ,由图可知
A. N点的电势低于M点的电势
( ) OM>ON ( )
B. M、N两点的电场方向相同且M点的场强大小大于N点的场强大小
C. 仅在电场力作用下,正电荷可以在x轴上M、N之间的某两点做往复运动
D. 负电荷沿x轴从M点移到N点的过程中电场力先做正功后做负功
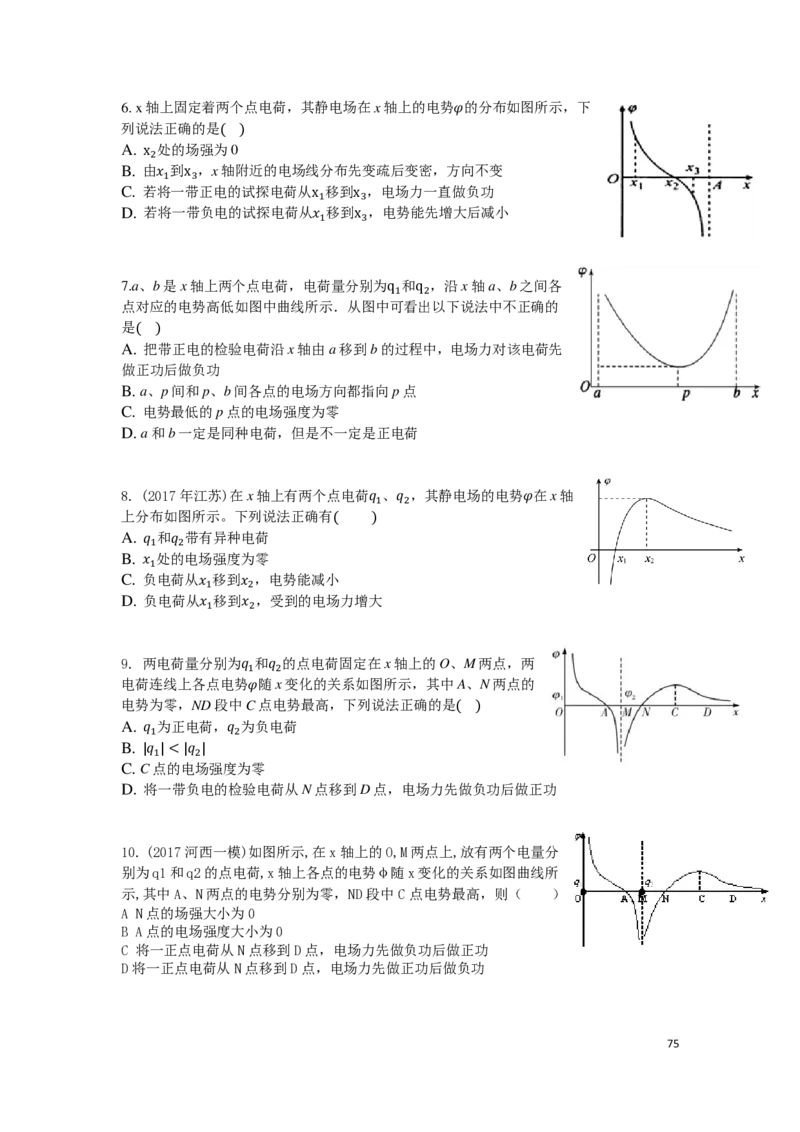
746. x轴上固定着两个点电荷,其静电场在x轴上的电势 的分布如图所示,下
列说法正确的是
𝜑𝜑
A. 处的场强为0
( )
B. 由 到 ,x轴附近的电场线分布先变疏后变密,方向不变
x2
C. 若将一带正电的试探电荷从 移到 ,电场力一直做负功
𝑥𝑥1 x3
D. 若将一带负电的试探电荷从 移到 ,电势能先增大后减小
x1 x3
𝑥𝑥1 x3
7.a、b是x轴上两个点电荷,电荷量分别为 和 ,沿x轴a、b之间各
点对应的电势高低如图中曲线所示.从图中可看出以下说法中不正确的
q1 q2
是
A. 把带正电的检验电荷沿x轴由a移到b的过程中,电场力对该电荷先
( )
做正功后做负功
B. a、p间和p、b间各点的电场方向都指向p点
C. 电势最低的p点的电场强度为零
D. a和b一定是同种电荷,但是不一定是正电荷
8. (2017年江苏)在x轴上有两个点电荷 、 ,其静电场的电势 在x轴
上分布如图所示。下列说法正确有
𝑞𝑞1 𝑞𝑞2 𝜑𝜑
A. 和 带有异种电荷
( )
B. 处的电场强度为零
𝑞𝑞1 𝑞𝑞2
C. 负电荷从 移到 ,电势能减小
𝑥𝑥1
D. 负电荷从 移到 ,受到的电场力增大
𝑥𝑥1 𝑥𝑥2
𝑥𝑥1 𝑥𝑥2
9. 两电荷量分别为 和 的点电荷固定在x轴上的O、M两点,两
电荷连线上各点电势 随x变化的关系如图所示,其中A、N两点的
𝑞𝑞1 𝑞𝑞2
电势为零,ND段中C点电势最高,下列说法正确的是
𝜑𝜑
A. 为正电荷, 为负电荷
( )
B.
𝑞𝑞1 𝑞𝑞2
C. C点的电场强度为零
|𝑞𝑞1|<|𝑞𝑞2|
D. 将一带负电的检验电荷从N点移到D点,电场力先做负功后做正功
10. (2017河西一模)如图所示,在x轴上的O,M两点上,放有两个电量分
别为q1和q2的点电荷,x轴上各点的电势φ随x变化的关系如图曲线所
示,其中A、N两点的电势分别为零,ND段中C点电势最高,则( )
A N点的场强大小为0
B A点的电场强度大小为0
C 将一正点电荷从N点移到D点,电场力先做负功后做正功
D将一正点电荷从N点移到D点,电场力先做正功后做负功
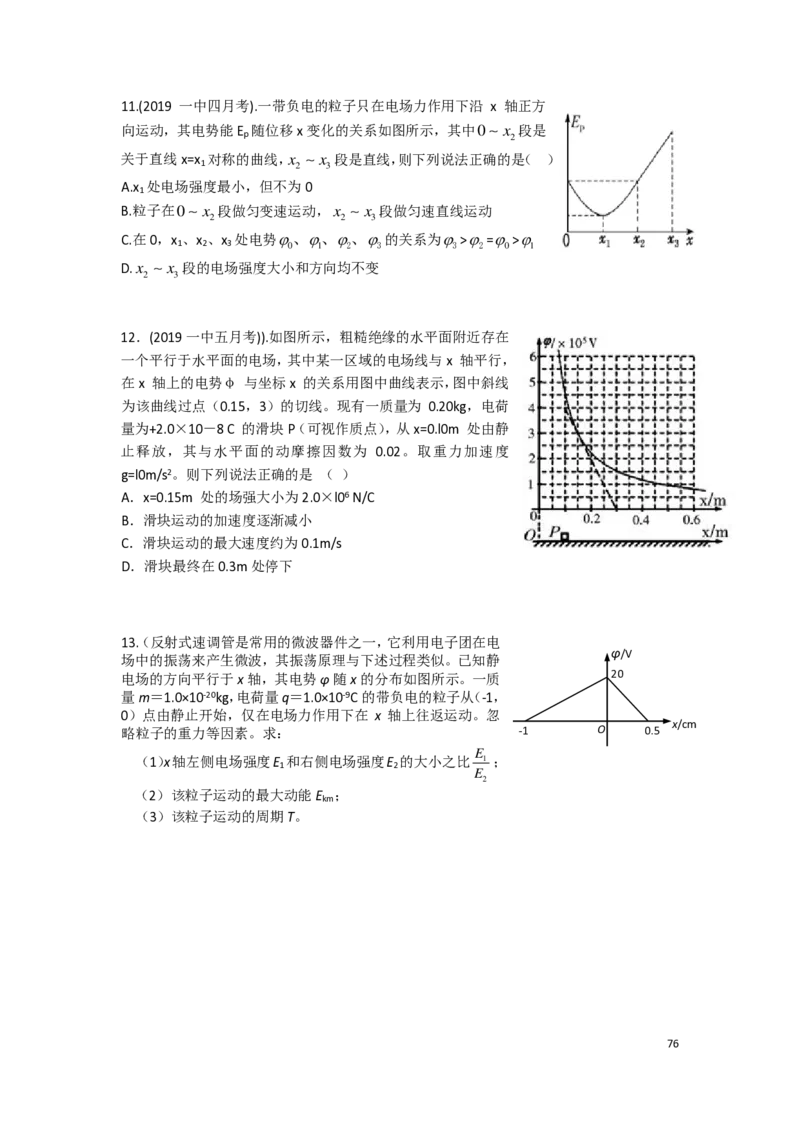
7511.(2019 一中四月考).一带负电的粒子只在电场力作用下沿 x 轴正方
向运动,其电势能E 随位移x变化的关系如图所示,其中0 x 段是
p 2
关于直线x=x 对称的曲线,x x 段是直线,则下列说法正确的是( )
1 2 3
A.x 处电场强度最小,但不为0
1
B.粒子在0 x 段做匀变速运动,x x 段做匀速直线运动
2 2 3
C.在0,x 、x 、x 处电势ϕ、ϕ、ϕ、ϕ的关系为ϕ>ϕ=ϕ>ϕ
1 2 3 0 1 2 3 3 2 0 1
D.x x 段的电场强度大小和方向均不变
2 3
12.(2019一中五月考)).如图所示,粗糙绝缘的水平面附近存在
一个平行于水平面的电场,其中某一区域的电场线与x 轴平行,
在x 轴上的电势φ 与坐标x 的关系用图中曲线表示,图中斜线
为该曲线过点(0.15,3)的切线。现有一质量为 0.20kg,电荷
量为+2.0×10-8 C 的滑块P(可视作质点),从x=0.l0m 处由静
止释放,其与水平面的动摩擦因数为 0.02。取重力加速度
g=l0m/s2。则下列说法正确的是 ( )
A.x=0.15m 处的场强大小为2.0×l06 N/C
B.滑块运动的加速度逐渐减小
C.滑块运动的最大速度约为0.1m/s
D.滑块最终在0.3m处停下
13.(反射式速调管是常用的微波器件之一,它利用电子团在电
场中的振荡来产生微波,其振荡原理与下述过程类似。已知静
φ/V
电场的方向平行于x轴,其电势φ随x的分布如图所示。一质 20
量m=1.0×10-20kg,电荷量q=1.0×10-9C的带负电的粒子从(-1,
0)点由静止开始,仅在电场力作用下在 x 轴上往返运动。忽
x/cm
略粒子的重力等因素。求: -1 O 0.5
E
(1)x轴左侧电场强度E 和右侧电场强度E 的大小之比 1 ;
1 2
E
2
(2)该粒子运动的最大动能E ;
km
(3)该粒子运动的周期T。
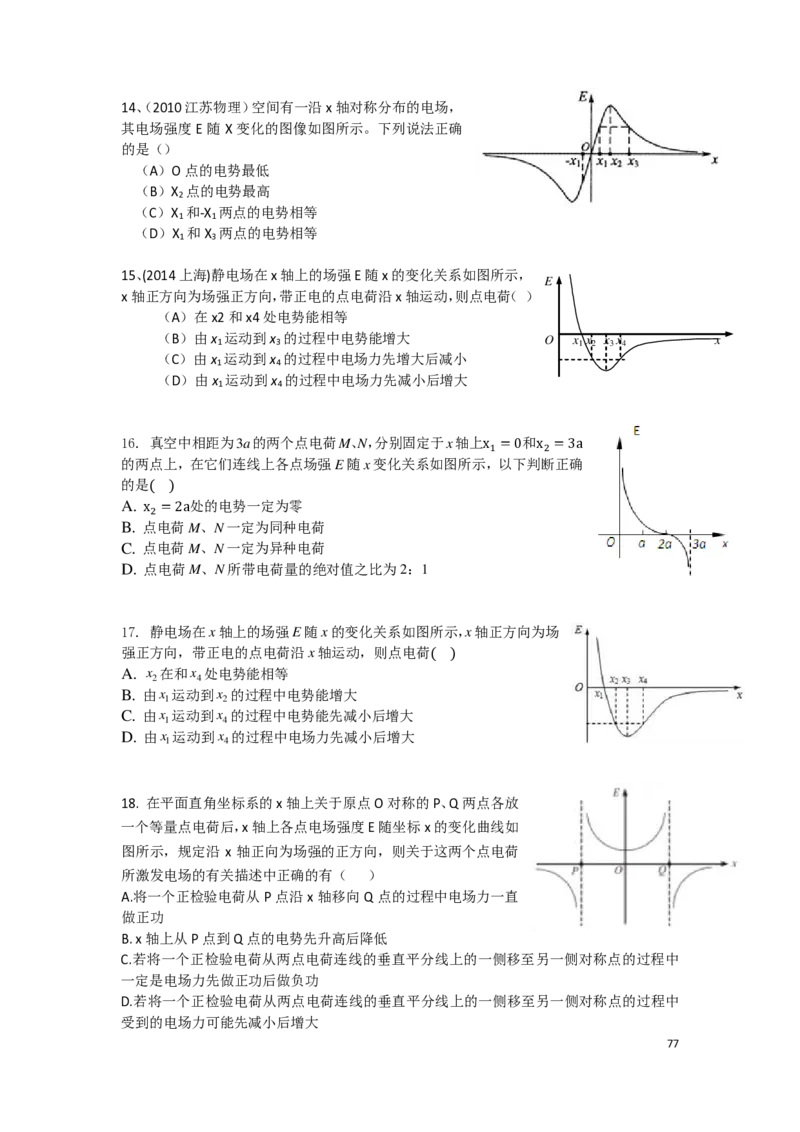
7614、(2010江苏物理)空间有一沿x轴对称分布的电场,
其电场强度 E 随X 变化的图像如图所示。下列说法正确
的是()
(A)O点的电势最低
(B)X 点的电势最高
2
(C)X 和-X 两点的电势相等
1 1
(D)X 和X 两点的电势相等
1 3
15、(2014上海)静电场在x轴上的场强E随x的变化关系如图所示,
E
x轴正方向为场强正方向,带正电的点电荷沿x轴运动,则点电荷( )
(A)在x2和x4处电势能相等
(B)由x
1
运动到x
3
的过程中电势能增大
O x 1 x 2 x 3 x 4 x
(C)由x 运动到x 的过程中电场力先增大后减小
1 4
(D)由x 运动到x 的过程中电场力先减小后增大
1 4
16. 真空中相距为3a的两个点电荷M、N,分别固定于x轴上 和
的两点上,在它们连线上各点场强E随x变化关系如图所示,以下判断正确
x1 =0 x2 =3a
的是
A. 处的电势一定为零
( )
B. 点电荷M、N一定为同种电荷
x2 =2a
C. 点电荷M、N一定为异种电荷
D. 点电荷M、N所带电荷量的绝对值之比为2:1
17. 静电场在x轴上的场强E随x的变化关系如图所示,x轴正方向为场
强正方向,带正电的点电荷沿x轴运动,则点电荷
A. x 在和x 处电势能相等
2 4
( )
B. 由x 运动到x 的过程中电势能增大
1 2
C. 由x 运动到x 的过程中电势能先减小后增大
1 4
D. 由x 运动到x 的过程中电场力先减小后增大
1 4
18. 在平面直角坐标系的x轴上关于原点O对称的P、Q两点各放
一个等量点电荷后,x轴上各点电场强度E随坐标x的变化曲线如
图所示,规定沿 x 轴正向为场强的正方向,则关于这两个点电荷
所激发电场的有关描述中正确的有( )
A.将一个正检验电荷从P点沿x轴移向Q点的过程中电场力一直
做正功
B. x轴上从P点到Q点的电势先升高后降低
C.若将一个正检验电荷从两点电荷连线的垂直平分线上的一侧移至另一侧对称点的过程中
一定是电场力先做正功后做负功
D.若将一个正检验电荷从两点电荷连线的垂直平分线上的一侧移至另一侧对称点的过程中
受到的电场力可能先减小后增大
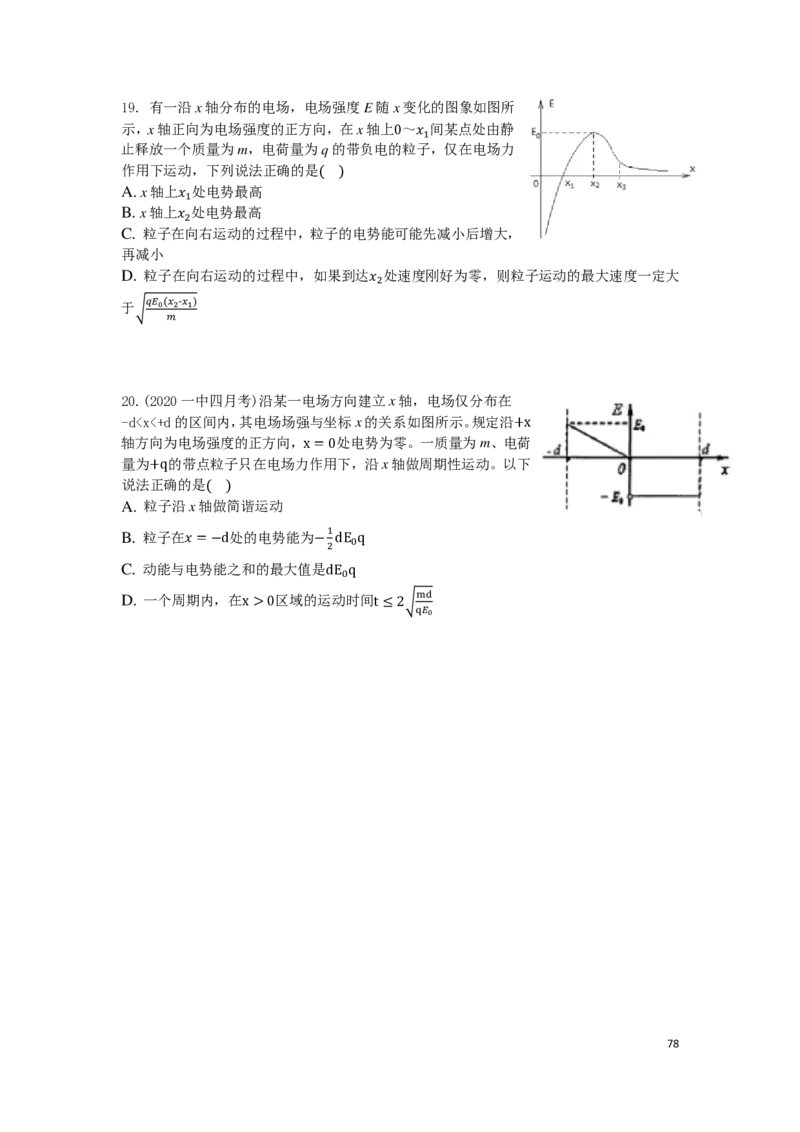
7719. 有一沿x轴分布的电场,电场强度E随x变化的图象如图所
示,x轴正向为电场强度的正方向,在x轴上 ~ 间某点处由静
止释放一个质量为m,电荷量为q的带负电的粒子,仅在电场力
0 𝑥𝑥1
作用下运动,下列说法正确的是
A. x轴上 处电势最高
( )
B. x轴上 处电势最高
𝑥𝑥1
C. 粒子在向右运动的过程中,粒子的电势能可能先减小后增大,
𝑥𝑥2
再减小
D. 粒子在向右运动的过程中,如果到达 处速度刚好为零,则粒子运动的最大速度一定大
于 - 𝑥𝑥2
𝑞𝑞𝐸𝐸0(𝑥𝑥2𝑥𝑥1)
� 𝐺𝐺
20.(2020一中四月考)沿某一电场方向建立x轴,电场仅分布在
-d0 t≤2�q𝐸𝐸0
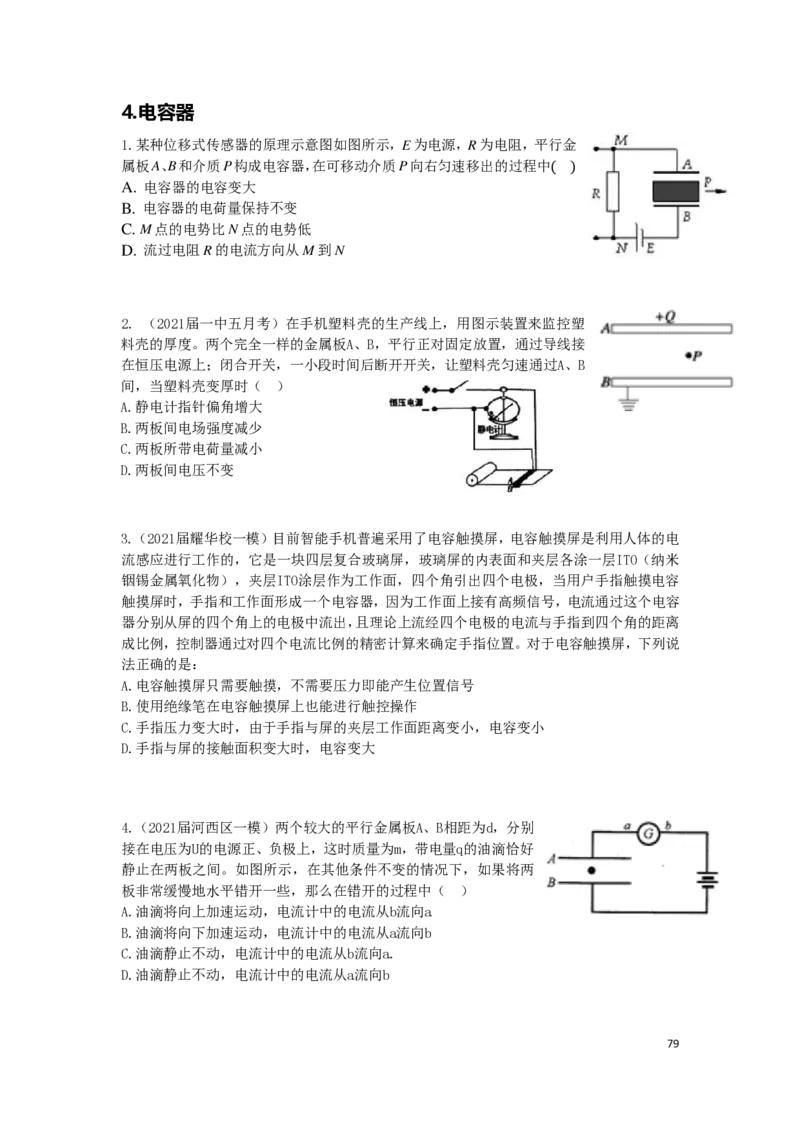
784.电容器
1.某种位移式传感器的原理示意图如图所示,E为电源,R为电阻,平行金
属板A、B和介质P构成电容器,在可移动介质P向右匀速移出的过程中
A. 电容器的电容变大
( )
B. 电容器的电荷量保持不变
C. M点的电势比N点的电势低
D. 流过电阻R的电流方向从M到N
2. (2021届一中五月考)在手机塑料壳的生产线上,用图示装置来监控塑
料壳的厚度。两个完全一样的金属板A、B,平行正对固定放置,通过导线接
在恒压电源上;闭合开关,一小段时间后断开开关,让塑料壳匀速通过A、B
间,当塑料壳变厚时( )
A.静电计指针偏角增大
B.两板间电场强度减少
C.两板所带电荷量减小
D.两板间电压不变
3.(2021届耀华校一模)目前智能手机普遍采用了电容触摸屏,电容触摸屏是利用人体的电
流感应进行工作的,它是一块四层复合玻璃屏,玻璃屏的内表面和夹层各涂一层ITO(纳米
铟锡金属氧化物),夹层ITO涂层作为工作面,四个角引出四个电极,当用户手指触摸电容
触摸屏时,手指和工作面形成一个电容器,因为工作面上接有高频信号,电流通过这个电容
器分别从屏的四个角上的电极中流出,且理论上流经四个电极的电流与手指到四个角的距离
成比例,控制器通过对四个电流比例的精密计算来确定手指位置。对于电容触摸屏,下列说
法正确的是:
A.电容触摸屏只需要触摸,不需要压力即能产生位置信号
B.使用绝缘笔在电容触摸屏上也能进行触控操作
C.手指压力变大时,由于手指与屏的夹层工作面距离变小,电容变小
D.手指与屏的接触面积变大时,电容变大
4.(2021届河西区一模)两个较大的平行金属板A、B相距为d,分别
接在电压为U的电源正、负极上,这时质量为m,带电量q的油滴恰好
静止在两板之间。如图所示,在其他条件不变的情况下,如果将两
板非常缓慢地水平错开一些,那么在错开的过程中( )
A.油滴将向上加速运动,电流计中的电流从b流向a
B.油滴将向下加速运动,电流计中的电流从a流向b
C.油滴静止不动,电流计中的电流从b流向a.
D.油滴静止不动,电流计中的电流从a流向b
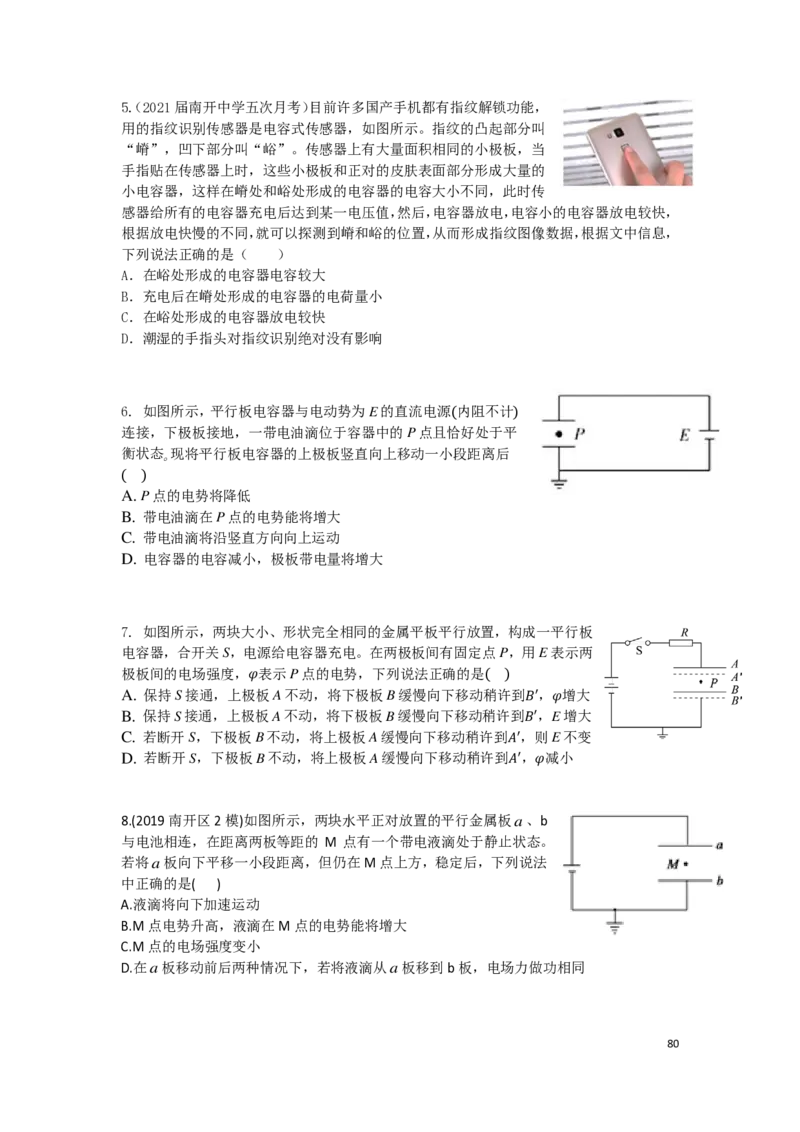
795.(2021届南开中学五次月考)目前许多国产手机都有指纹解锁功能,
用的指纹识别传感器是电容式传感器,如图所示。指纹的凸起部分叫
“嵴”,凹下部分叫“峪”。传感器上有大量面积相同的小极板,当
手指贴在传感器上时,这些小极板和正对的皮肤表面部分形成大量的
小电容器,这样在嵴处和峪处形成的电容器的电容大小不同,此时传
感器给所有的电容器充电后达到某一电压值,然后,电容器放电,电容小的电容器放电较快,
根据放电快慢的不同,就可以探测到嵴和峪的位置,从而形成指纹图像数据,根据文中信息,
下列说法正确的是( )
A.在峪处形成的电容器电容较大
B.充电后在嵴处形成的电容器的电荷量小
C.在峪处形成的电容器放电较快
D.潮湿的手指头对指纹识别绝对没有影响
6. 如图所示,平行板电容器与电动势为E的直流电源 内阻不计
连接,下极板接地,一带电油滴位于容器中的P点且恰好处于平
( )
衡状态。现将平行板电容器的上极板竖直向上移动一小段距离后
A. P点的电势将降低
( )
B. 带电油滴在P点的电势能将增大
C. 带电油滴将沿竖直方向向上运动
D. 电容器的电容减小,极板带电量将增大
7. 如图所示,两块大小、形状完全相同的金属平板平行放置,构成一平行板
电容器,合开关S,电源给电容器充电。在两极板间有固定点P,用E表示两
极板间的电场强度, 表示P点的电势,下列说法正确的是
A. 保持S接通,上极板A不动,将下极板B缓慢向下移动稍许到 , 增大
𝜑𝜑 ( )
B. 保持S接通,上极板A不动,将下极板B缓慢向下移动稍许到 ,E增大
𝐴𝐴′ 𝜑𝜑
C. 若断开S,下极板B不动,将上极板A缓慢向下移动稍许到 ,则E不变
𝐴𝐴′
D. 若断开S,下极板B不动,将上极板A缓慢向下移动稍许到 , 减小
𝐴𝐴′
𝐴𝐴′ 𝜑𝜑
8.(2019南开区2模)如图所示,两块水平正对放置的平行金属板a、b
与电池相连,在距离两板等距的 M 点有一个带电液滴处于静止状态。
若将a板向下平移一小段距离,但仍在M点上方,稳定后,下列说法
中正确的是( )
A.液滴将向下加速运动
B.M点电势升高,液滴在M点的电势能将增大
C.M点的电场强度变小
D.在a板移动前后两种情况下,若将液滴从a板移到b板,电场力做功相同
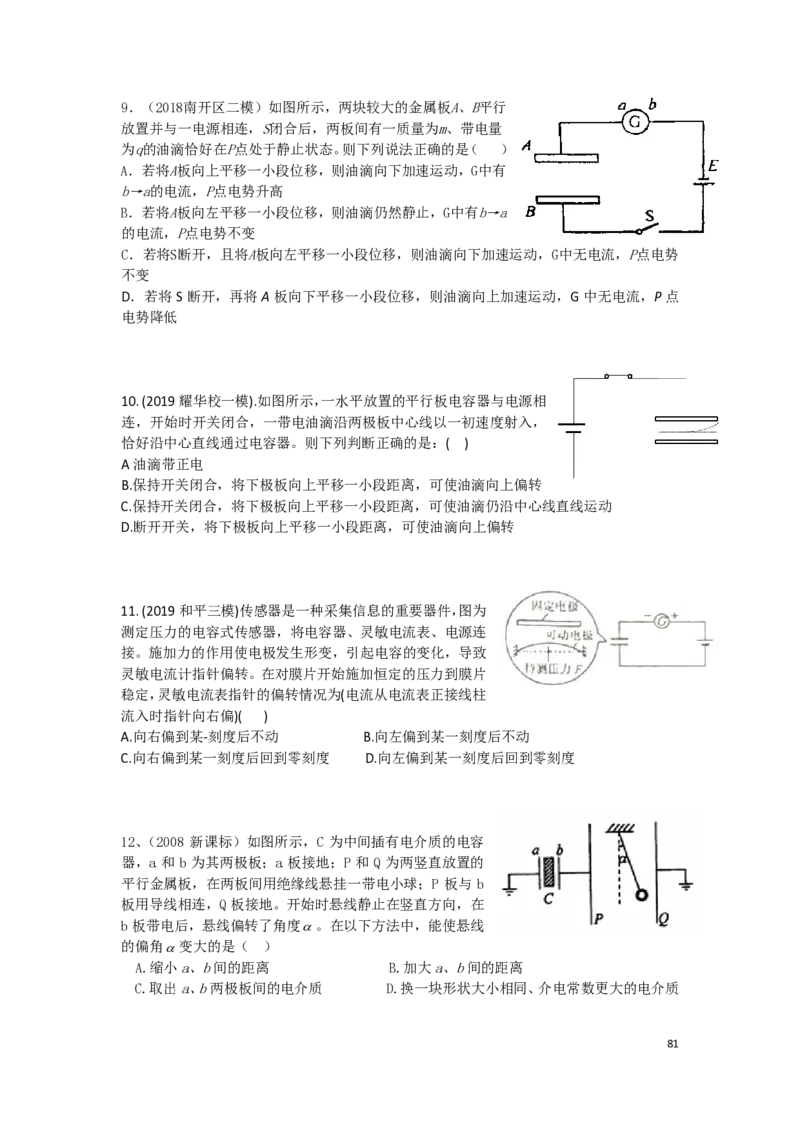
809.(2018南开区二模)如图所示,两块较大的金属板A、B平行
放置并与一电源相连,S闭合后,两板间有一质量为m、带电量
为q的油滴恰好在P点处于静止状态。则下列说法正确的是( )
A.若将A板向上平移一小段位移,则油滴向下加速运动,G中有
b→a的电流,P点电势升高
B.若将A板向左平移一小段位移,则油滴仍然静止,G中有b→a
的电流,P点电势不变
C.若将S断开,且将A板向左平移一小段位移,则油滴向下加速运动,G中无电流,P点电势
不变
D.若将 S断开,再将A 板向下平移一小段位移,则油滴向上加速运动,G 中无电流,P 点
电势降低
10. (2019耀华校一模).如图所示,一水平放置的平行板电容器与电源相
连,开始时开关闭合,一带电油滴沿两极板中心线以一初速度射入,
恰好沿中心直线通过电容器。则下列判断正确的是:( )
A油滴带正电
B.保持开关闭合,将下极板向上平移一小段距离,可使油滴向上偏转
C.保持开关闭合,将下极板向上平移一小段距离,可使油滴仍沿中心线直线运动
D.断开开关,将下极板向上平移一小段距离,可使油滴向上偏转
11. (2019和平三模)传感器是一种采集信息的重要器件,图为
测定压力的电容式传感器,将电容器、灵敏电流表、电源连
接。施加力的作用使电极发生形变,引起电容的变化,导致
灵敏电流计指针偏转。在对膜片开始施加恒定的压力到膜片
稳定,灵敏电流表指针的偏转情况为(电流从电流表正接线柱
流入时指针向右偏)( )
A.向右偏到某-刻度后不动 B.向左偏到某一刻度后不动
C.向右偏到某一刻度后回到零刻度 D.向左偏到某一刻度后回到零刻度
12、(2008 新课标)如图所示,C 为中间插有电介质的电容
器,a 和 b 为其两极板;a 板接地;P 和 Q 为两竖直放置的
平行金属板,在两板间用绝缘线悬挂一带电小球;P 板与 b
板用导线相连,Q板接地。开始时悬线静止在竖直方向,在
b板带电后,悬线偏转了角度α。在以下方法中,能使悬线
的偏角α变大的是( )
A.缩小a、b间的距离 B.加大a、b间的距离
C.取出a、b两极板间的电介质 D.换一块形状大小相同、介电常数更大的电介质
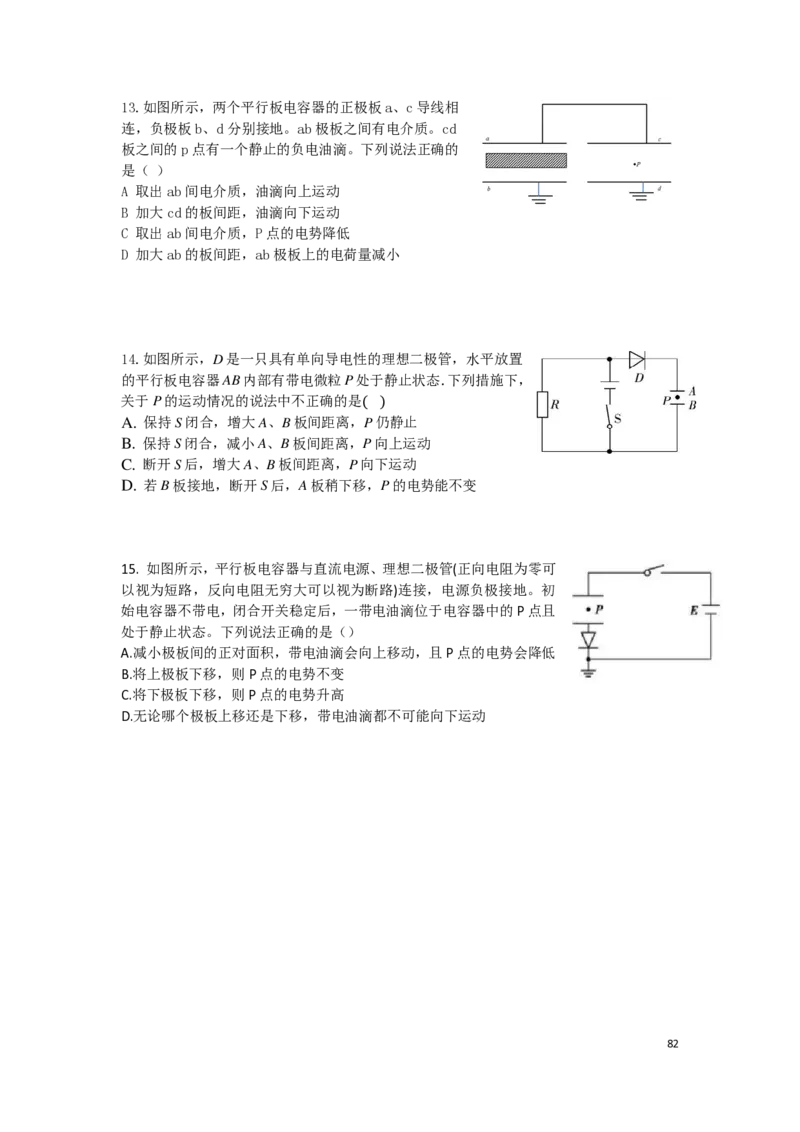
8113.如图所示,两个平行板电容器的正极板a、c导线相
连,负极板b、d分别接地。ab极板之间有电介质。cd
板之间的p点有一个静止的负电油滴。下列说法正确的
是( )
A 取出ab间电介质,油滴向上运动
B 加大cd的板间距,油滴向下运动
C 取出ab间电介质,P点的电势降低
D 加大ab的板间距,ab极板上的电荷量减小
14.如图所示,D是一只具有单向导电性的理想二极管,水平放置
的平行板电容器AB内部有带电微粒P处于静止状态.下列措施下,
关于P的运动情况的说法中不正确的是
A. 保持S闭合,增大A、B板间距离,P仍静止
( )
B. 保持S闭合,减小A、B板间距离,P向上运动
C. 断开S后,增大A、B板间距离,P向下运动
D. 若B板接地,断开S后,A板稍下移,P的电势能不变
15. 如图所示,平行板电容器与直流电源、理想二极管(正向电阻为零可
以视为短路,反向电阻无穷大可以视为断路)连接,电源负极接地。初
始电容器不带电,闭合开关稳定后,一带电油滴位于电容器中的P点且
处于静止状态。下列说法正确的是()
A.减小极板间的正对面积,带电油滴会向上移动,且P点的电势会降低
B.将上极板下移,则P点的电势不变
C.将下极板下移,则P点的电势升高
D.无论哪个极板上移还是下移,带电油滴都不可能向下运动
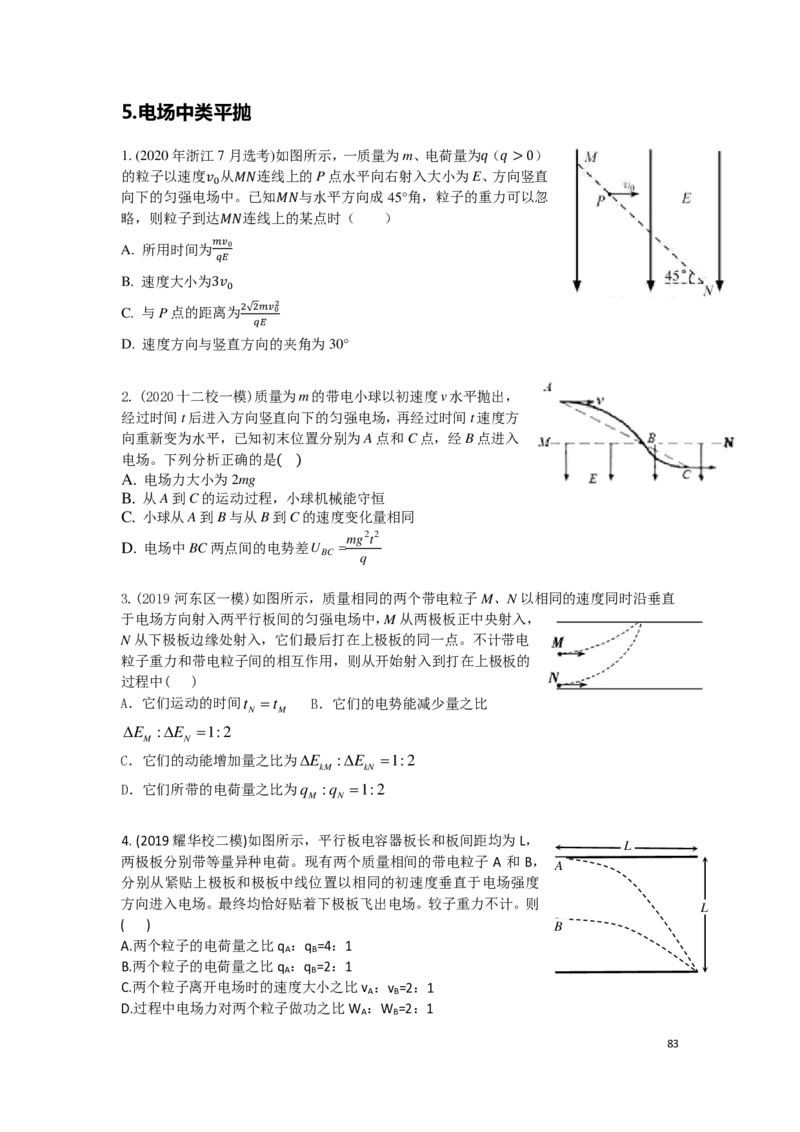
825.电场中类平抛
1. (2020年浙江7月选考)如图所示,一质量为m、电荷量为 ( )
的粒子以速度 从 连线上的P点水平向右射入大小为E、方向竖直
𝑞𝑞 𝑞𝑞 >0
向下的匀强电场中。已知 与水平方向成45°角,粒子的重力可以忽
𝑣𝑣0 𝑀𝑀𝑀𝑀
略,则粒子到达 连线上的某点时( )
𝑀𝑀𝑀𝑀
A. 所用时间为 𝑀𝑀𝑀𝑀
𝐺𝐺𝑣𝑣0
B. 速度大小为𝑞𝑞𝐸𝐸
C. 与P点的距3离𝑣𝑣为0
2
2√2𝐺𝐺𝑣𝑣0
D. 速度方向与竖直方𝑞𝑞向𝐸𝐸的夹角为30°
2. (2020十二校一模)质量为m的带电小球以初速度v水平抛出,
经过时间t后进入方向竖直向下的匀强电场,再经过时间t速度方
向重新变为水平,已知初末位置分别为A点和C点,经B点进入
电场。下列分析正确的是
A. 电场力大小为2mg
( )
B. 从A到C的运动过程,小球机械能守恒
C. 小球从A到B与从B到C的速度变化量相同
mg2t2
D. 电场中BC两点间的电势差U =
BC
q
3.(2019河东区一模)如图所示,质量相同的两个带电粒子M、N以相同的速度同时沿垂直
于电场方向射入两平行板间的匀强电场中,M从两极板正中央射入,
N从下极板边缘处射入,它们最后打在上极板的同一点。不计带电
粒子重力和带电粒子间的相互作用,则从开始射入到打在上极板的
过程中( )
A.它们运动的时间t =t B.它们的电势能减少量之比
N M
∆E :∆E =1:2
M N
C.它们的动能增加量之比为∆E :∆E =1:2
kM kN
D.它们所带的电荷量之比为q :q =1:2
M N
4. (2019耀华校二模)如图所示,平行板电容器板长和板间距均为L,
L
两极板分别带等量异种电荷。现有两个质量相间的带电粒子 A 和 B, A
分别从紧贴上极板和极板中线位置以相同的初速度垂直于电场强度
方向进入电场。最终均恰好贴着下极板飞出电场。较子重力不计。则
L
( ) B
A.两个粒子的电荷量之比q :q =4:1
A B
B.两个粒子的电荷量之比q :q =2:1
A B
C.两个粒子离开电场时的速度大小之比v :v =2:1
A B
D.过程中电场力对两个粒子做功之比W :W =2:1
A B
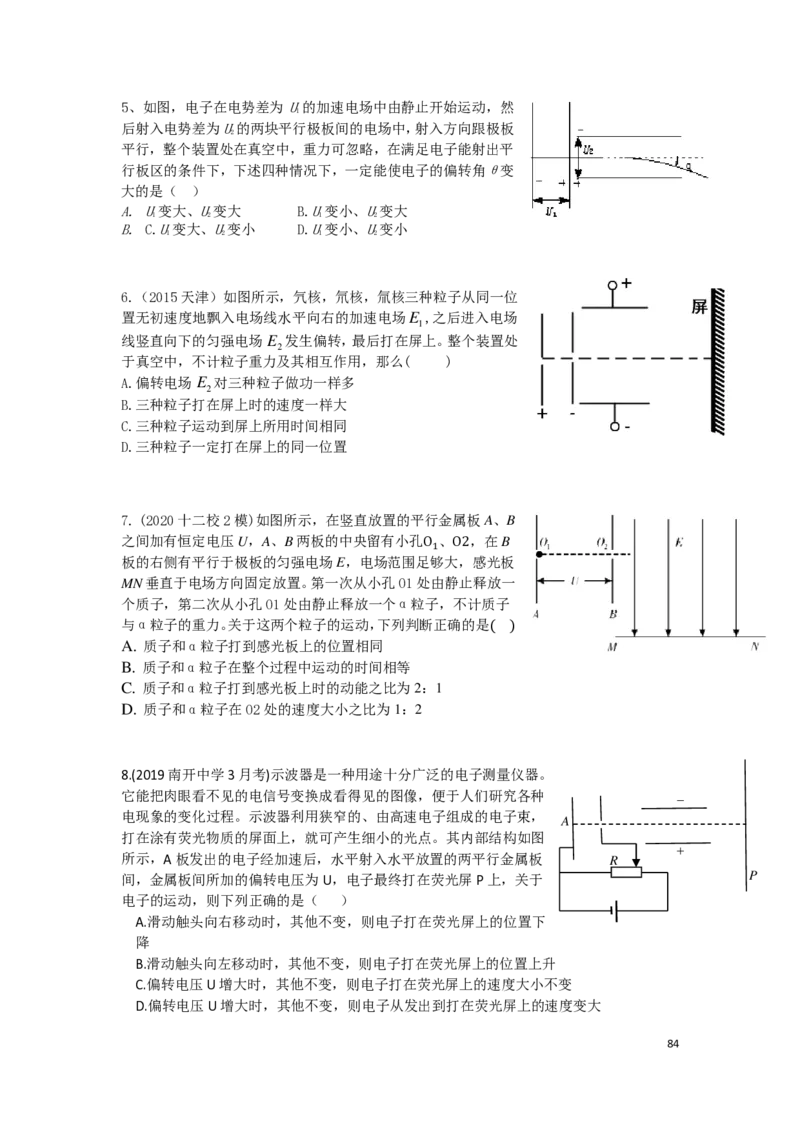
835、如图,电子在电势差为 U的加速电场中由静止开始运动,然
1
后射入电势差为U的两块平行极板间的电场中,射入方向跟极板
2
平行,整个装置处在真空中,重力可忽略,在满足电子能射出平
行板区的条件下,下述四种情况下,一定能使电子的偏转角θ变
大的是( )
A. U
1
变大、U
2
变大 B.U
1
变小、U
2
变大
B. C.U
1
变大、U
2
变小 D.U
1
变小、U
2
变小
6.(2015天津)如图所示,氕核,氘核,氚核三种粒子从同一位
置无初速度地飘入电场线水平向右的加速电场E ,之后进入电场
1
线竖直向下的匀强电场 E 发生偏转,最后打在屏上。整个装置处
2
于真空中,不计粒子重力及其相互作用,那么( )
A.偏转电场 E 对三种粒子做功一样多
2
B.三种粒子打在屏上时的速度一样大
C.三种粒子运动到屏上所用时间相同
D.三种粒子一定打在屏上的同一位置
7. (2020十二校2模)如图所示,在竖直放置的平行金属板A、B
之间加有恒定电压U,A、B两板的中央留有小孔 、 ,在B
板的右侧有平行于极板的匀强电场E,电场范围足够大,感光板
O1 O2
MN垂直于电场方向固定放置。第一次从小孔O1处由静止释放一
个质子,第二次从小孔O1处由静止释放一个α粒子,不计质子
与α粒子的重力。关于这两个粒子的运动,下列判断正确的是
A. 质子和α粒子打到感光板上的位置相同
( )
B. 质子和α粒子在整个过程中运动的时间相等
C. 质子和α粒子打到感光板上时的动能之比为2:1
D. 质子和α粒子在O2处的速度大小之比为1:2
8.(2019南开中学3月考)示波器是一种用途十分广泛的电子测量仪器。
它能把肉眼看不见的电信号变换成看得见的图像,便于人们研究各种
−
电现象的变化过程。示波器利用狭窄的、由高速电子组成的电子束,
A
打在涂有荧光物质的屏面上,就可产生细小的光点。其内部结构如图
+
所示,A板发出的电子经加速后,水平射入水平放置的两平行金属板 R
间,金属板间所加的偏转电压为U,电子最终打在荧光屏P上,关于 P
电子的运动,则下列正确的是( )
A.滑动触头向右移动时,其他不变,则电子打在荧光屏上的位置下
降
B.滑动触头向左移动时,其他不变,则电子打在荧光屏上的位置上升
C.偏转电压U增大时,其他不变,则电子打在荧光屏上的速度大小不变
D.偏转电压U增大时,其他不变,则电子从发出到打在荧光屏上的速度变大
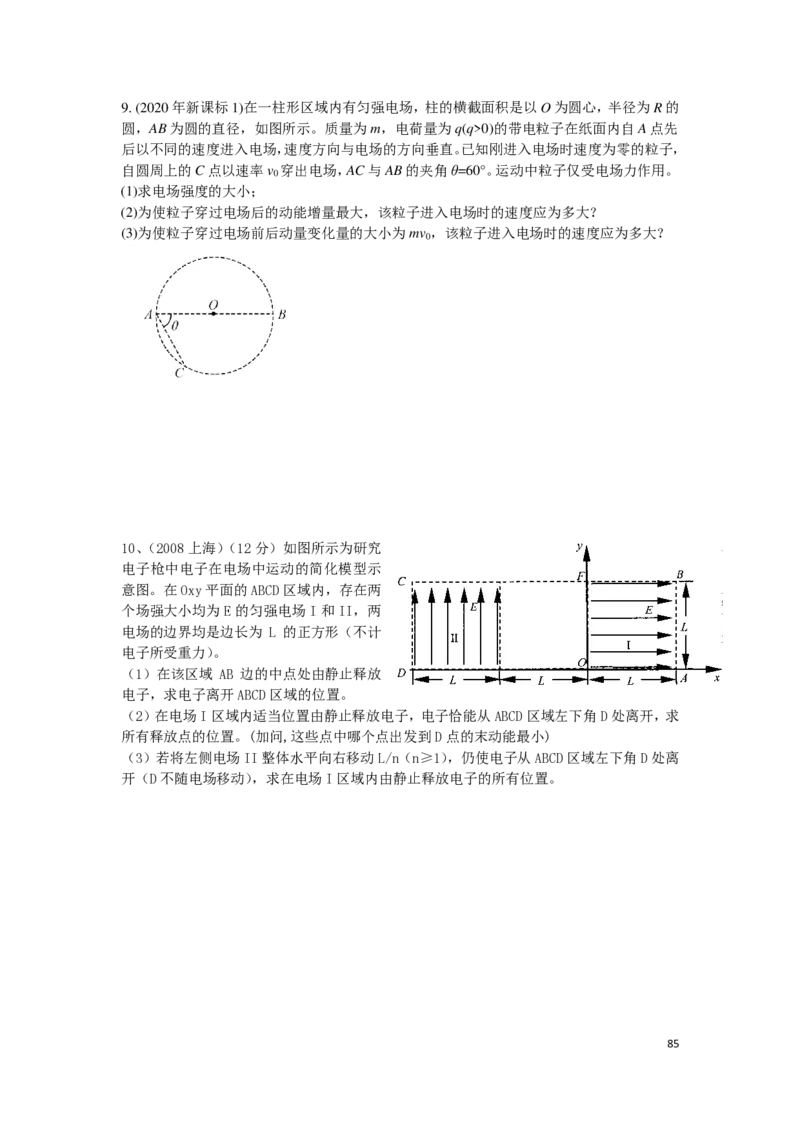
849. (2020年新课标1)在一柱形区域内有匀强电场,柱的横截面积是以O为圆心,半径为R的
圆,AB为圆的直径,如图所示。质量为m,电荷量为q(q>0)的带电粒子在纸面内自A点先
后以不同的速度进入电场,速度方向与电场的方向垂直。已知刚进入电场时速度为零的粒子,
自圆周上的C点以速率v 穿出电场,AC与AB的夹角θ=60°。运动中粒子仅受电场力作用。
0
(1)求电场强度的大小;
(2)为使粒子穿过电场后的动能增量最大,该粒子进入电场时的速度应为多大?
(3)为使粒子穿过电场前后动量变化量的大小为mv ,该粒子进入电场时的速度应为多大?
0
10、(2008上海)(12分)如图所示为研究
电子枪中电子在电场中运动的简化模型示
意图。在Oxy平面的ABCD区域内,存在两
个场强大小均为E的匀强电场I和II,两
电场的边界均是边长为 L 的正方形(不计
电子所受重力)。
(1)在该区域 AB 边的中点处由静止释放
电子,求电子离开ABCD区域的位置。
(2)在电场I区域内适当位置由静止释放电子,电子恰能从ABCD区域左下角D处离开,求
所有释放点的位置。(加问,这些点中哪个点出发到D点的末动能最小)
(3)若将左侧电场II整体水平向右移动L/n(n≥1),仍使电子从ABCD区域左下角D处离
开(D不随电场移动),求在电场I区域内由静止释放电子的所有位置。
856.电场和重力场里的抛体运动
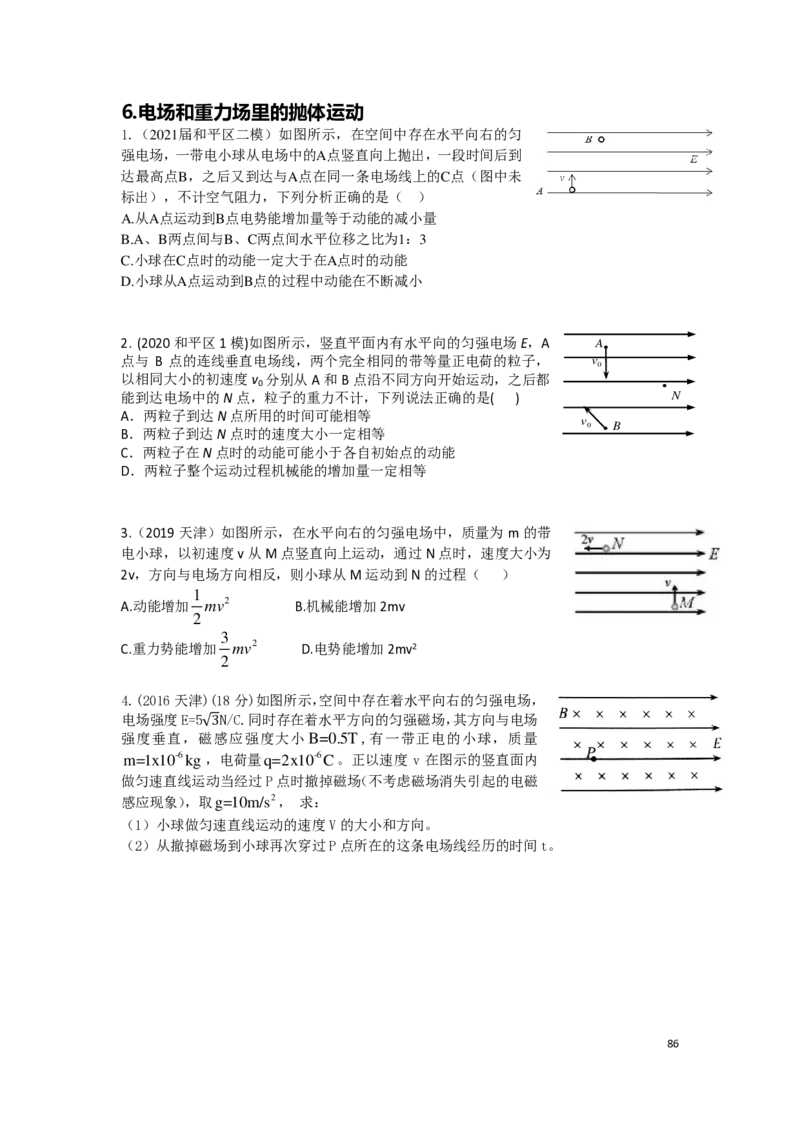
1.(2021届和平区二模)如图所示,在空间中存在水平向右的匀
强电场,一带电小球从电场中的A点竖直向上抛出,一段时间后到
达最高点B,之后又到达与A点在同一条电场线上的C点(图中未
标出),不计空气阻力,下列分析正确的是( )
A.从A点运动到B点电势能增加量等于动能的减小量
B.A、B两点间与B、C两点间水平位移之比为1:3
C.小球在C点时的动能一定大于在A点时的动能
D.小球从A点运动到B点的过程中动能在不断减小
2. (2020和平区1模)如图所示,竖直平面内有水平向的匀强电场E,A A
点与 B 点的连线垂直电场线,两个完全相同的带等量正电荷的粒子, v
0
以相同大小的初速度v 分别从A和B点沿不同方向开始运动,之后都
0
能到达电场中的N点,粒子的重力不计,下列说法正确的是( ) N
A.两粒子到达N点所用的时间可能相等
v
0 B
B.两粒子到达N点时的速度大小一定相等
C.两粒子在N点时的动能可能小于各自初始点的动能
D.两粒子整个运动过程机械能的增加量一定相等
3.(2019 天津)如图所示,在水平向右的匀强电场中,质量为m 的带
电小球,以初速度v从M点竖直向上运动,通过N点时,速度大小为
2v,方向与电场方向相反,则小球从M运动到N的过程( )
1
A.动能增加 mv2 B.机械能增加2mv
2
3
C.重力势能增加 mv2 D.电势能增加2mv2
2
4.(2016天津)(18分)如图所示,空间中存在着水平向右的匀强电场,
电场强度E=5 N/C.同时存在着水平方向的匀强磁场,其方向与电场
强度垂直,磁感应强度大小B=0.5T,有一带正电的小球,质量
√3
m=1x10-6kg,电荷量q=2x10-6C。正以速度 v 在图示的竖直面内
做匀速直线运动当经过P点时撤掉磁场(不考虑磁场消失引起的电磁
感应现象),取g=10m/s2, 求:
(1)小球做匀速直线运动的速度V的大小和方向。
(2)从撤掉磁场到小球再次穿过P点所在的这条电场线经历的时间t。
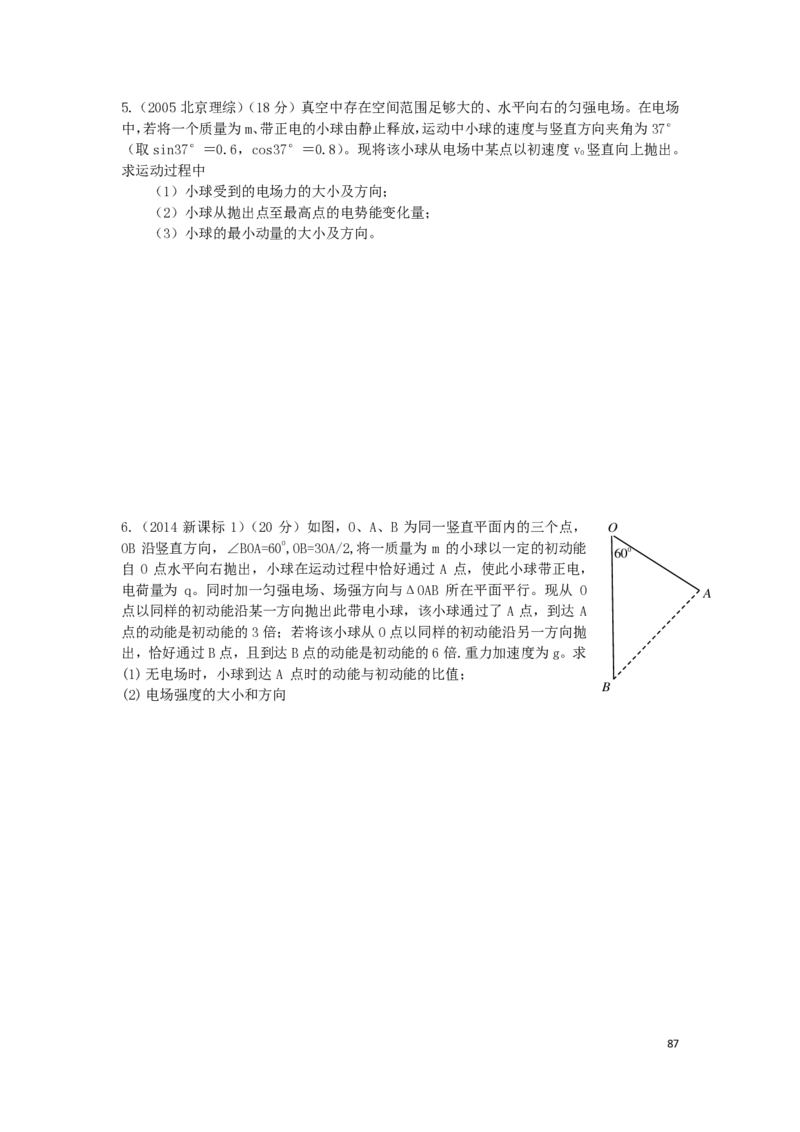
865.(2005北京理综)(18分)真空中存在空间范围足够大的、水平向右的匀强电场。在电场
中,若将一个质量为m、带正电的小球由静止释放,运动中小球的速度与竖直方向夹角为37°
(取sin37°=0.6,cos37°=0.8)。现将该小球从电场中某点以初速度v 竖直向上抛出。
0
求运动过程中
(1)小球受到的电场力的大小及方向;
(2)小球从抛出点至最高点的电势能变化量;
(3)小球的最小动量的大小及方向。
6.(2014 新课标 1)(20 分)如图,O、A、B 为同一竖直平面内的三个点, O
OB 沿竖直方向,∠BOA=600,OB=3OA/2,将一质量为 m 的小球以一定的初动能
600
自 O 点水平向右抛出,小球在运动过程中恰好通过 A 点,使此小球带正电,
电荷量为 q。同时加一匀强电场、场强方向与ΔOAB 所在平面平行。现从 O
A
点以同样的初动能沿某一方向抛出此带电小球,该小球通过了 A 点,到达 A
点的动能是初动能的3倍;若将该小球从O点以同样的初动能沿另一方向抛
出,恰好通过B点,且到达B点的动能是初动能的6倍.重力加速度为g。求
(1) 无电场时,小球到达A 点时的动能与初动能的比值;
B
(2) 电场强度的大小和方向
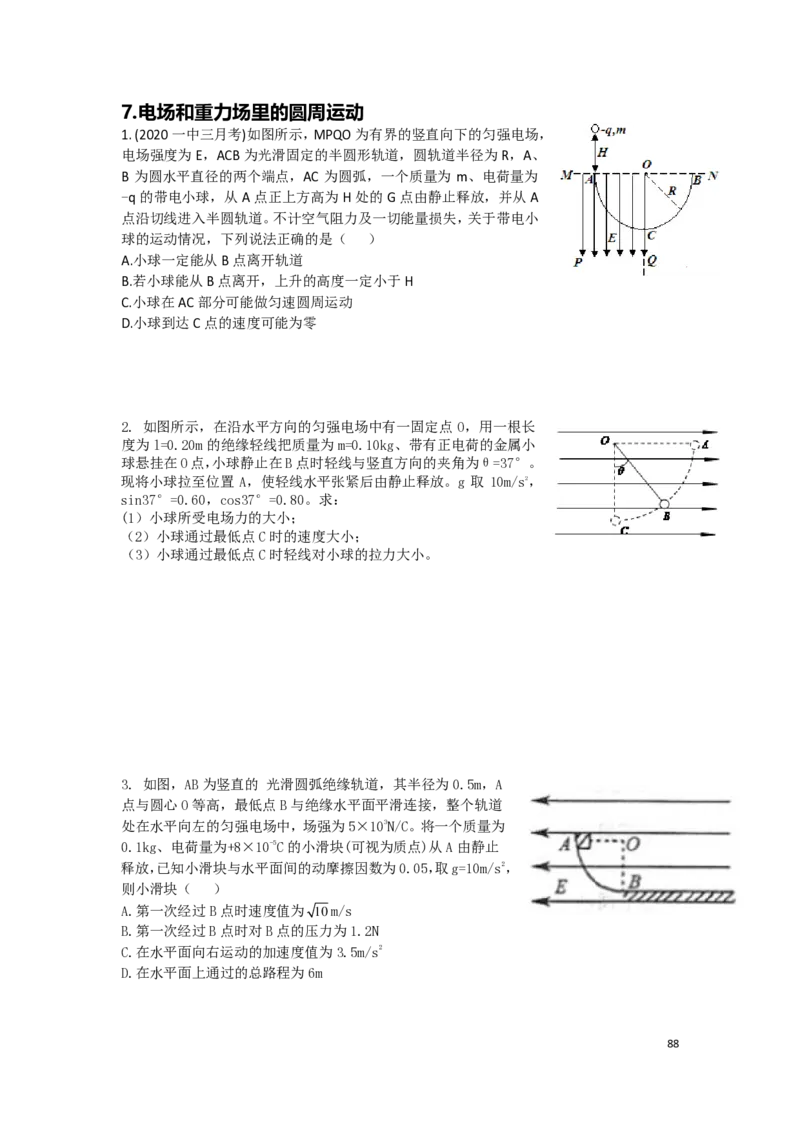
877.电场和重力场里的圆周运动
1. (2020一中三月考)如图所示,MPQO为有界的竖直向下的匀强电场,
电场强度为E,ACB为光滑固定的半圆形轨道,圆轨道半径为R,A、
B 为圆水平直径的两个端点,AC 为圆弧,一个质量为 m、电荷量为
-q的带电小球,从A点正上方高为H处的G点由静止释放,并从A
点沿切线进入半圆轨道。不计空气阻力及一切能量损失,关于带电小
球的运动情况,下列说法正确的是( )
A.小球一定能从B点离开轨道
B.若小球能从B点离开,上升的高度一定小于H
C.小球在AC部分可能做匀速圆周运动
D.小球到达C点的速度可能为零
2. 如图所示,在沿水平方向的匀强电场中有一固定点 O,用一根长
度为l=0.20m的绝缘轻线把质量为m=0.10kg、带有正电荷的金属小
球悬挂在O点,小球静止在B点时轻线与竖直方向的夹角为θ=37°。
现将小球拉至位置 A,使轻线水平张紧后由静止释放。g 取 10m/s2,
sin37°=0.60,cos37°=0.80。求:
(1)小球所受电场力的大小;
(2)小球通过最低点C时的速度大小;
(3)小球通过最低点C时轻线对小球的拉力大小。
3. 如图,AB为竖直的 光滑圆弧绝缘轨道,其半径为0.5m,A
点与圆心O等高,最低点B与绝缘水平面平滑连接,整个轨道
处在水平向左的匀强电场中,场强为5×103N/C。将一个质量为
0.1kg、电荷量为+8×10-5C的小滑块(可视为质点)从A由静止
释放,已知小滑块与水平面间的动摩擦因数为0.05,取g=10m/s2,
则小滑块( )
A.第一次经过B点时速度值为 10m/s
B.第一次经过B点时对B点的压力为1.2N
C.在水平面向右运动的加速度值为3.5m/s2
D.在水平面上通过的总路程为6m
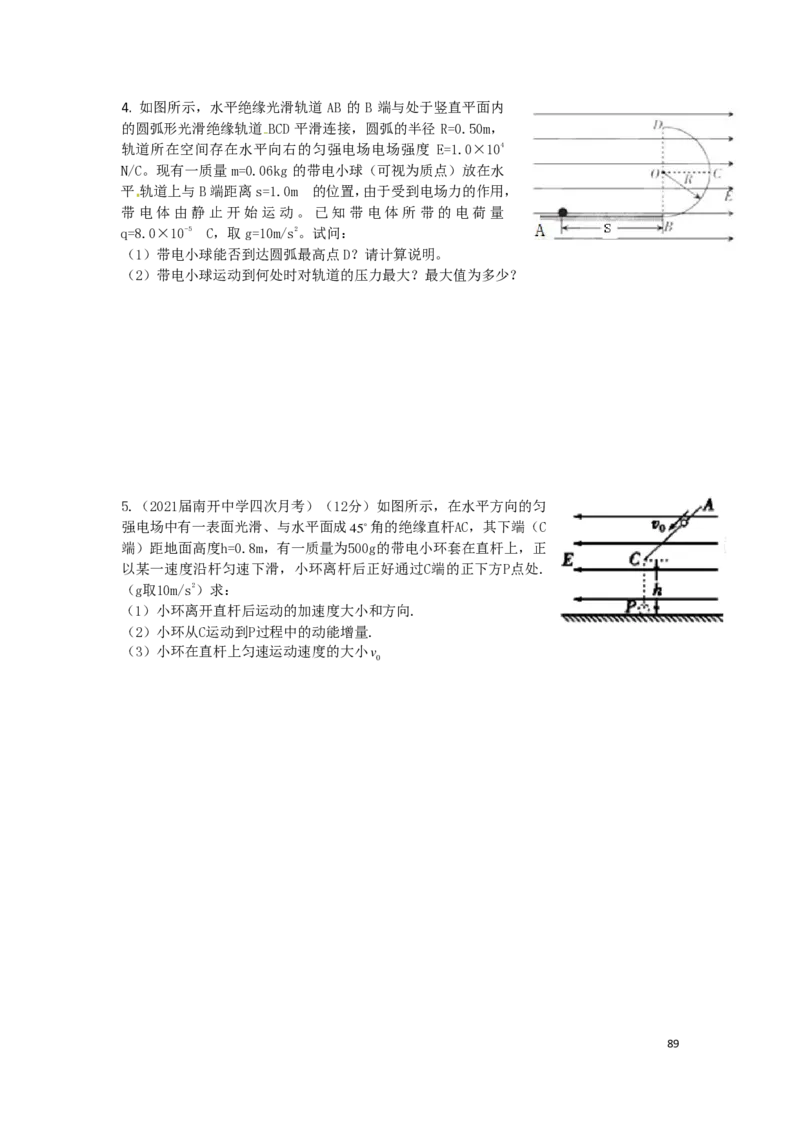
884. 如图所示,水平绝缘光滑轨道 AB 的 B 端与处于竖直平面内
的圆弧形光滑绝缘轨道 BCD 平滑连接,圆弧的半径 R=0.50m,
轨道所在空间存在水平向右的匀强电场电场强度 E=1.0×104
N/C。现有一质量 m=0.06kg 的带电小球(可视为质点)放在水
平轨道上与B端距离s=1.0m 的位置,由于受到电场力的作用,
带电体由静止开始运动。 已知带电体所带的电荷量
q=8.0×10-5 C,取g=10m/s2。试问:
(1)带电小球能否到达圆弧最高点D?请计算说明。
(2)带电小球运动到何处时对轨道的压力最大?最大值为多少?
5.(2021届南开中学四次月考)(12分)如图所示,在水平方向的匀
强电场中有一表面光滑、与水平面成45角的绝缘直杆AC,其下端(C
端)距地面高度h=0.8m,有一质量为500g的带电小环套在直杆上,正
以某一速度沿杆匀速下滑,小环离杆后正好通过C端的正下方P点处.
(g取10m/s2)求:
(1)小环离开直杆后运动的加速度大小和方向.
(2)小环从C运动到P过程中的动能增量.
(3)小环在直杆上匀速运动速度的大小v
0
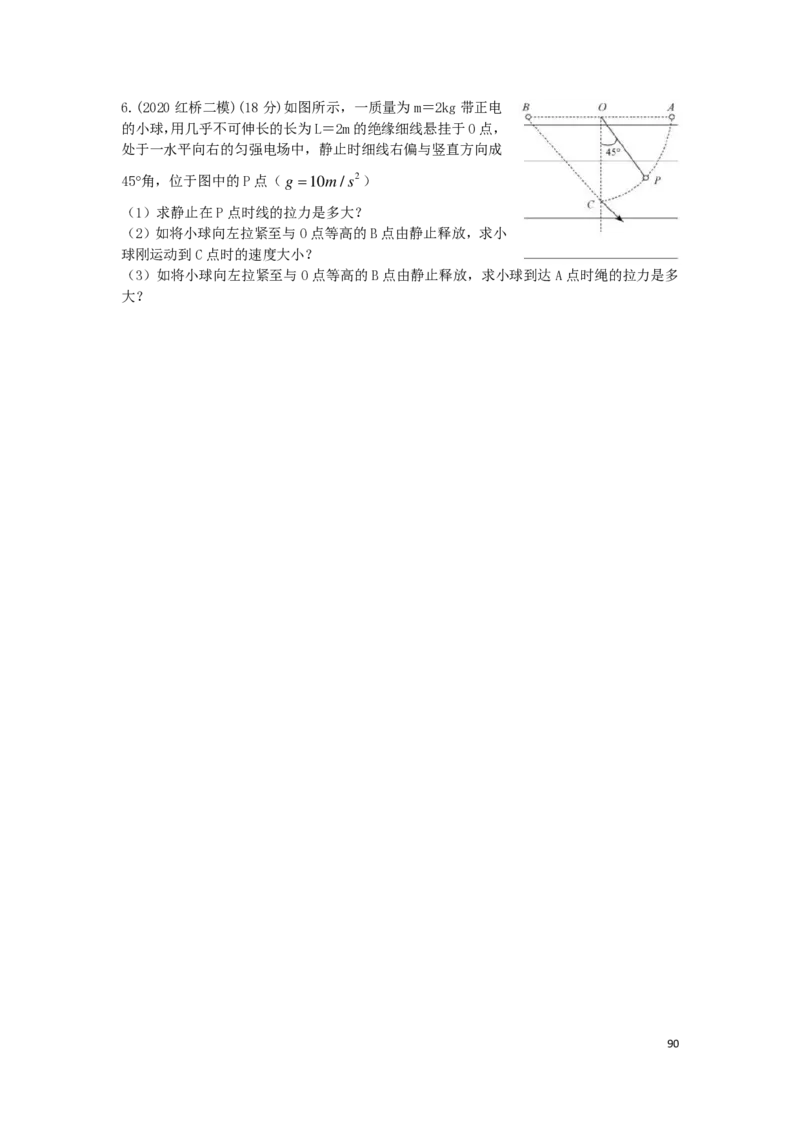
896.(2020红桥二模)(18分)如图所示,一质量为m=2kg带正电
的小球,用几乎不可伸长的长为L=2m的绝缘细线悬挂于O点,
处于一水平向右的匀强电场中,静止时细线右偏与竖直方向成
45°角,位于图中的P点(g =10m/s2)
(1)求静止在P点时线的拉力是多大?
(2)如将小球向左拉紧至与O点等高的B点由静止释放,求小
球刚运动到C点时的速度大小?
(3)如将小球向左拉紧至与O点等高的B点由静止释放,求小球到达A点时绳的拉力是多
大?
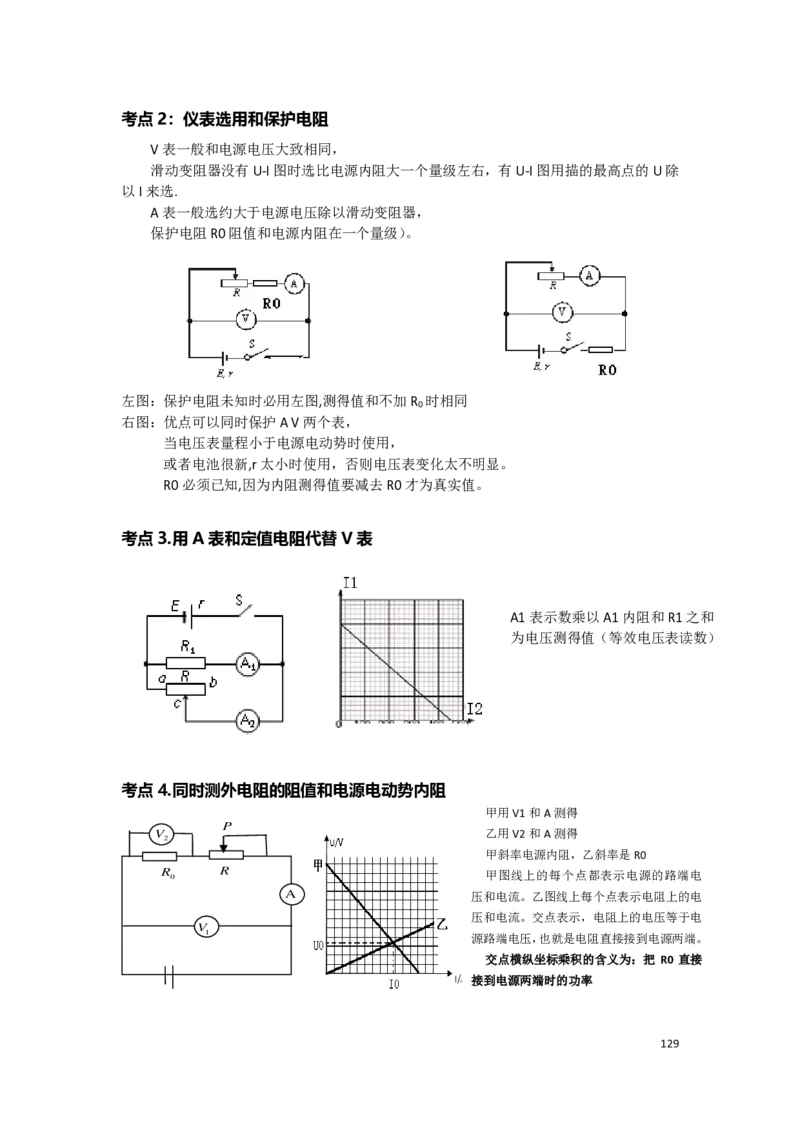
90电路实验
一、 电表的读数、结构、改装
考点1:电流表和电压表的估读
第一步:量程除以总小格数得到每小格的值,叫做精度。
第二步:如精度为1,0.1,0.01(不管单位是安培还是福特,或者毫安毫伏),都需要向后
估读一位。
第三步:如果每小格表示0.02、0.2、2,用二分法估读,看指针的位置,不足半小格一
律忽略不计,超过半小格按照半小格读。
第四步: 每小格是 0.5、5,采用五分法估读,即估读为每个格示数的五分之一,五分
之二......五分之四.
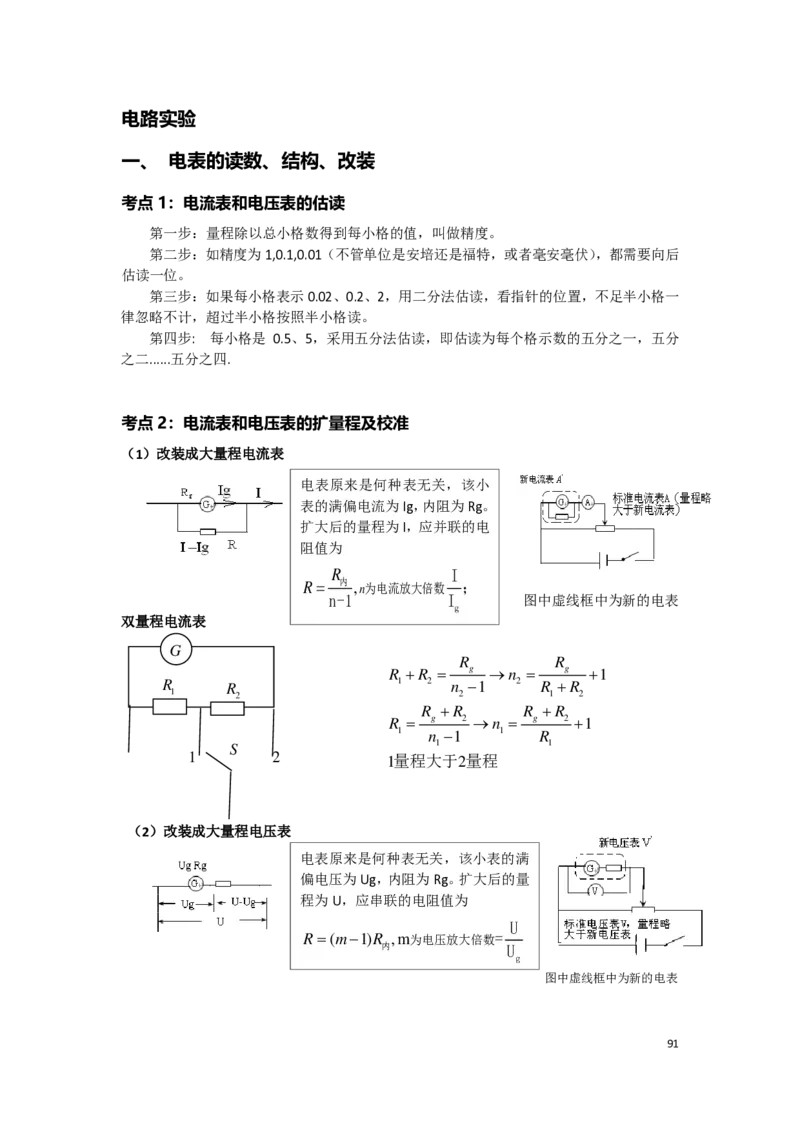
考点2:电流表和电压表的扩量程及校准
(1)改装成大量程电流表
电表原来是何种表无关,该小
表的满偏电流为Ig,内阻为Rg。
扩大后的量程为I,应并联的电
阻值为
R I
R= 内 ,n为电流放大倍数 ;
n-1 I 图中虚线框中为新的电表
g
双量程电流表
G
R R
R +R = g →n = g +1
R R 1 2 n −1 2 R +R
1 2 2 1 2
R +R R +R
R = g 2 →n = g 2 +1
1 n −1 1 R
S
1 1
1 2 1量程大于2量程
(2)改装成大量程电压表
电表原来是何种表无关,该小表的满
偏电压为Ug,内阻为Rg。扩大后的量
程为U,应串联的电阻值为
U
R=(m−1)R ,m为电压放大倍数=
内 U
g
图中虚线框中为新的电表
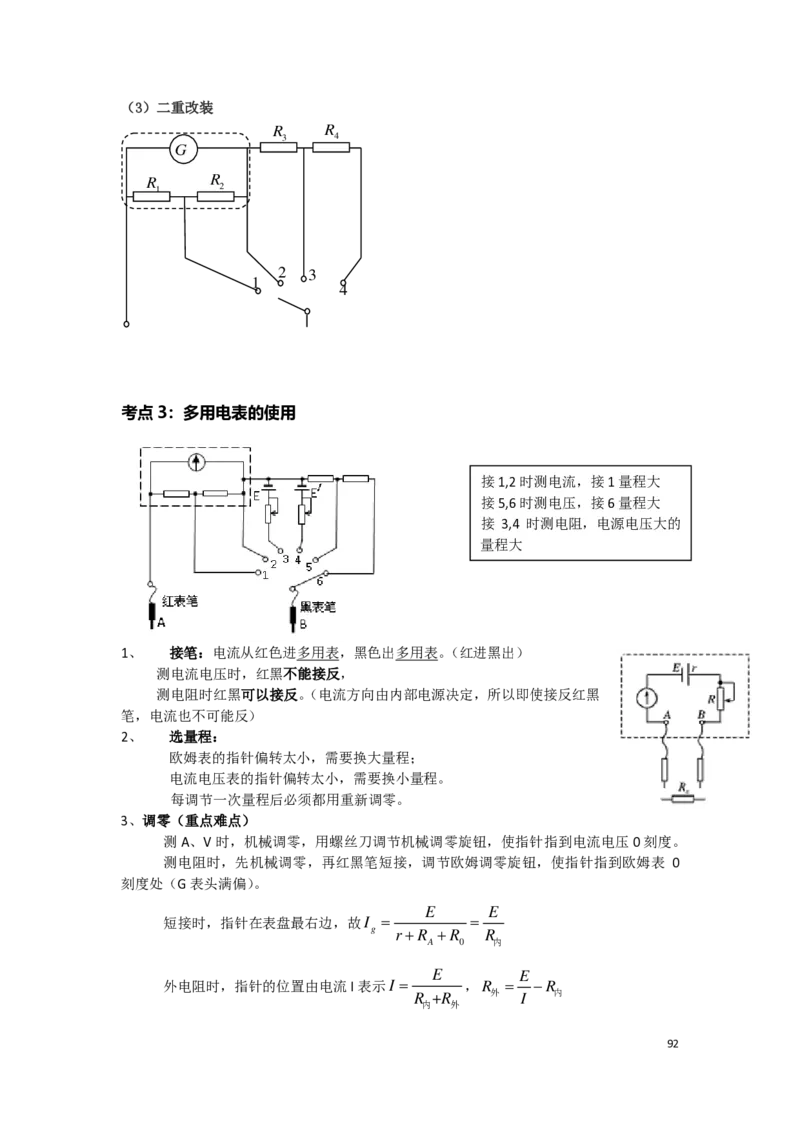
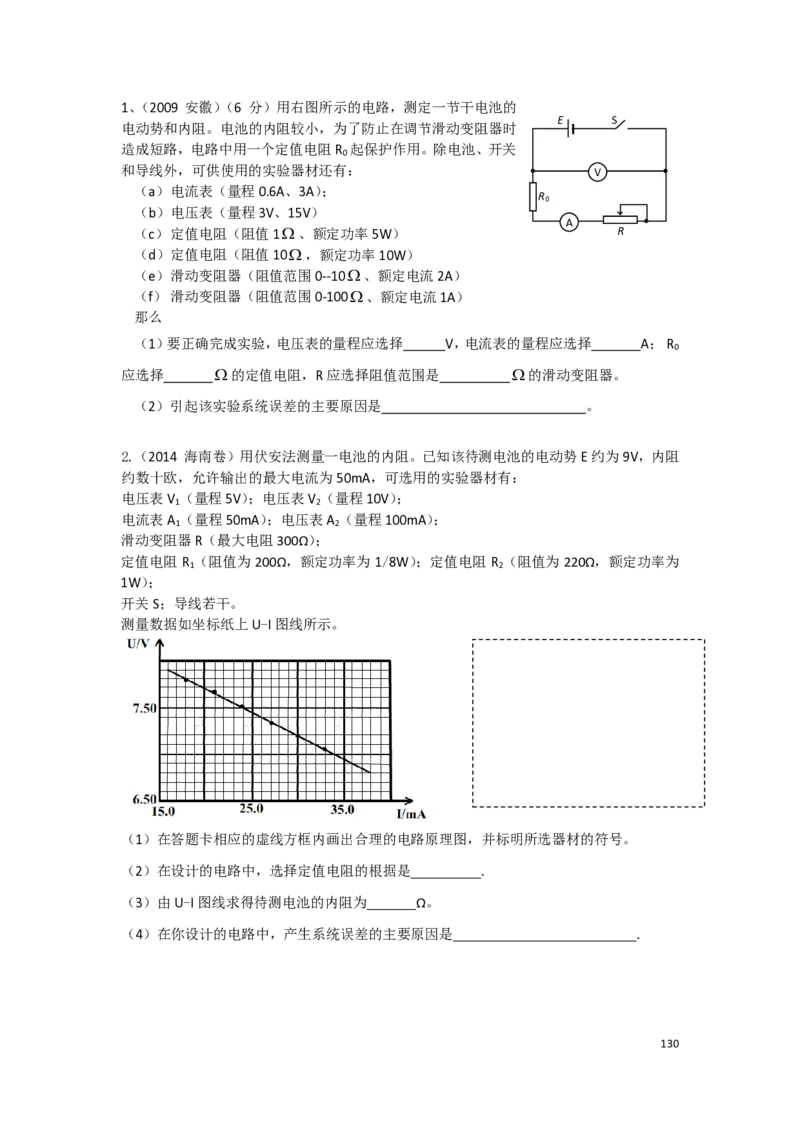
91(3)二重改装
R R
3 4
G
R R
1 2
2 3
1
4
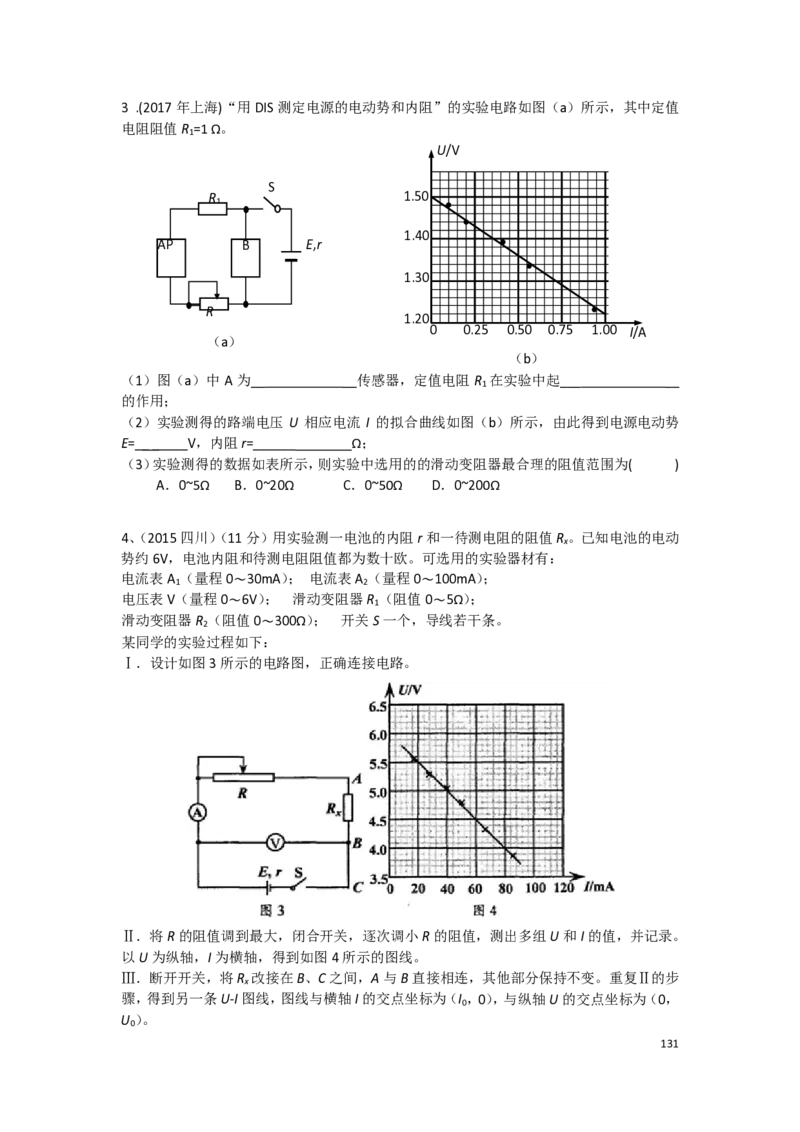
考点3:多用电表的使用
接1,2时测电流,接1量程大
接5,6时测电压,接6量程大
接 3,4 时测电阻,电源电压大的
量程大
1、 接笔:电流从红色进多用表,黑色出多用表。(红进黑出)
测电流电压时,红黑不能接反,
测电阻时红黑可以接反。(电流方向由内部电源决定,所以即使接反红黑
笔,电流也不可能反)
2、 选量程:
欧姆表的指针偏转太小,需要换大量程;
电流电压表的指针偏转太小,需要换小量程。
每调节一次量程后必须都用重新调零。
3、调零(重点难点)
测A、V时,机械调零,用螺丝刀调节机械调零旋钮,使指针指到电流电压0刻度。
测电阻时,先机械调零,再红黑笔短接,调节欧姆调零旋钮,使指针指到欧姆表 0
刻度处(G表头满偏)。
E E
短接时,指针在表盘最右边,故I = =
g r+R +R R
A 0 内
E E
外电阻时,指针的位置由电流I表示I = ,R = −R
R +R 外 I 内
内 外
92R
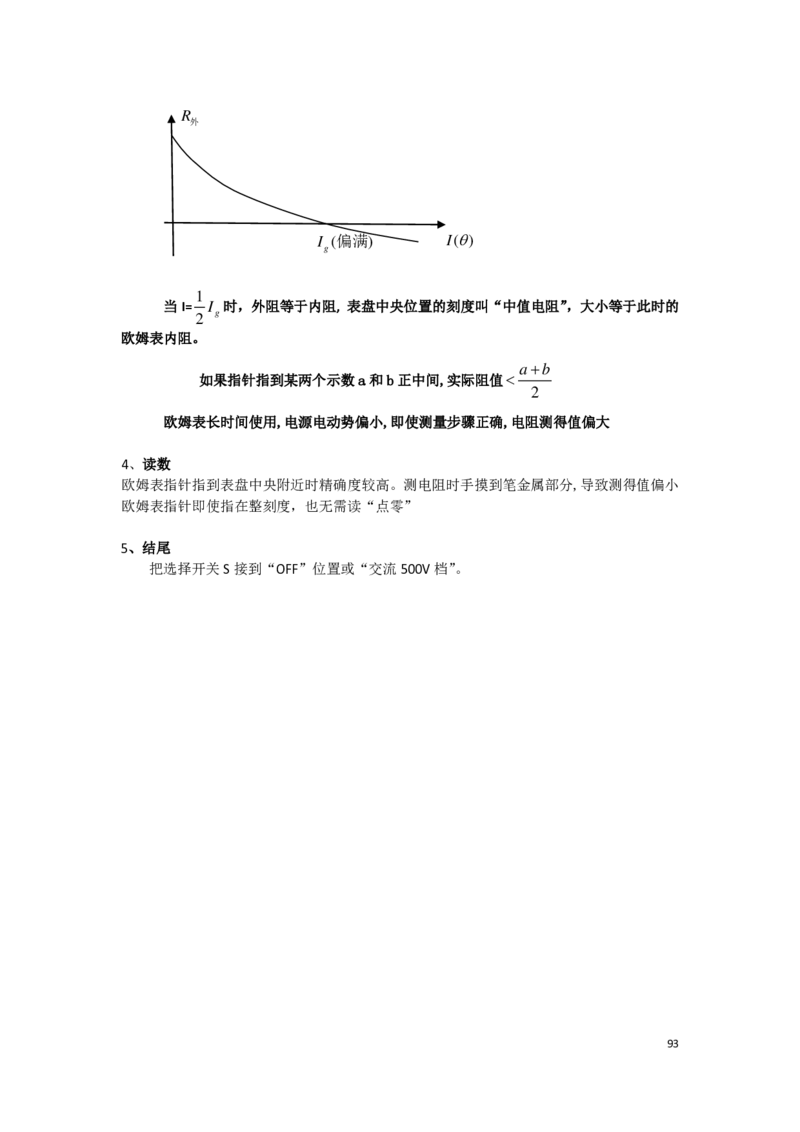
外
I (偏满) I(θ)
g
1
当I= I 时,外阻等于内阻, 表盘中央位置的刻度叫“中值电阻”,大小等于此时的
2 g
欧姆表内阻。
a+b
如果指针指到某两个示数a和b正中间,实际阻值<
2
欧姆表长时间使用,电源电动势偏小,即使测量步骤正确,电阻测得值偏大
4、读数
欧姆表指针指到表盘中央附近时精确度较高。测电阻时手摸到笔金属部分,导致测得值偏小
欧姆表指针即使指在整刻度,也无需读“点零”
5、结尾
把选择开关S接到“OFF”位置或“交流500V档”。
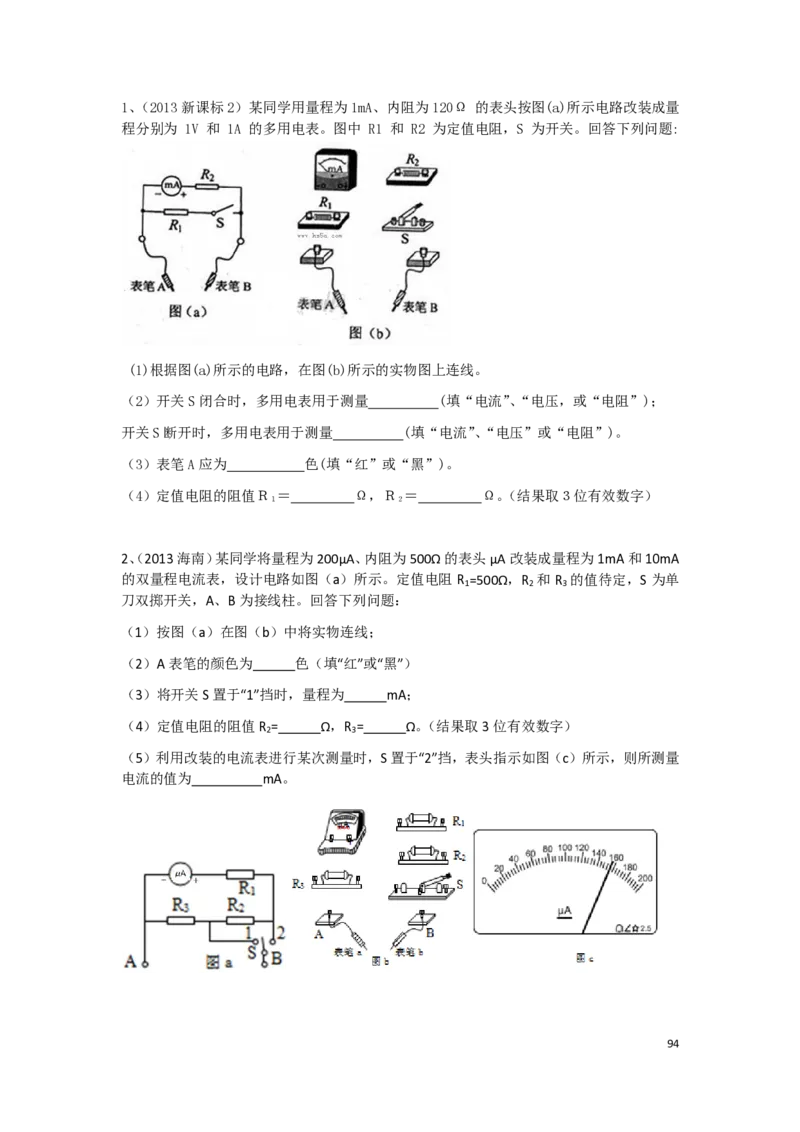
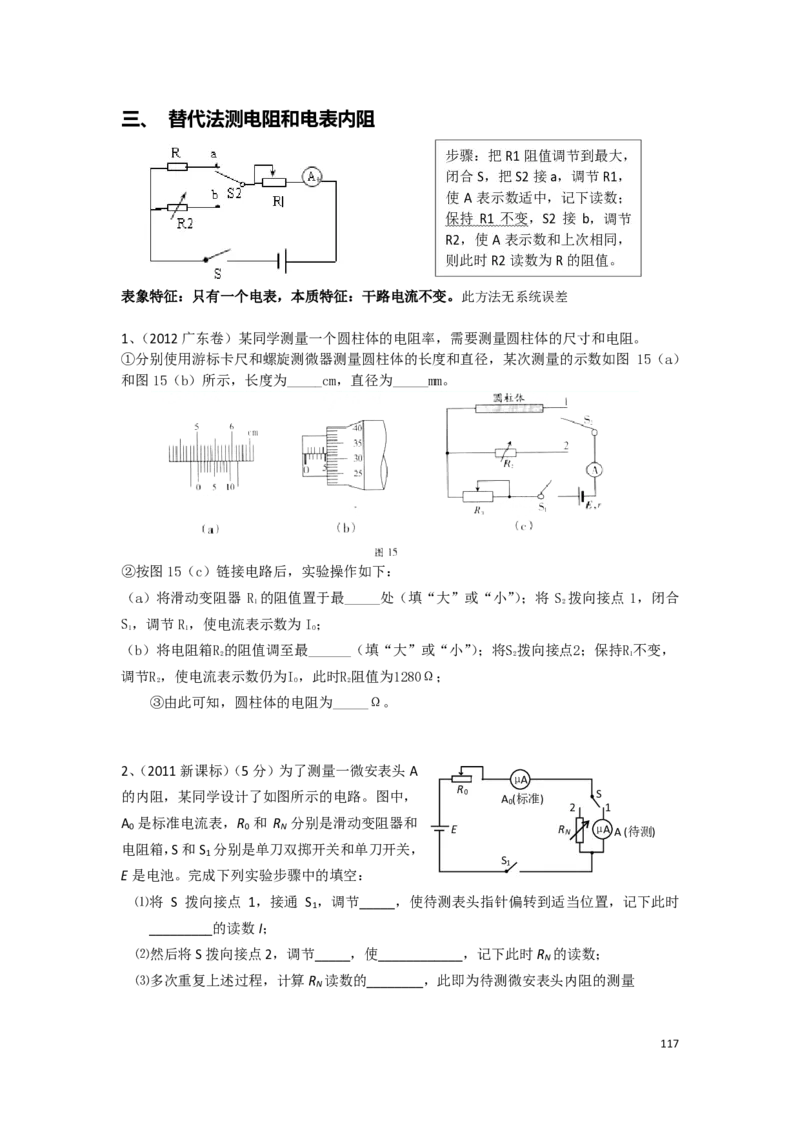
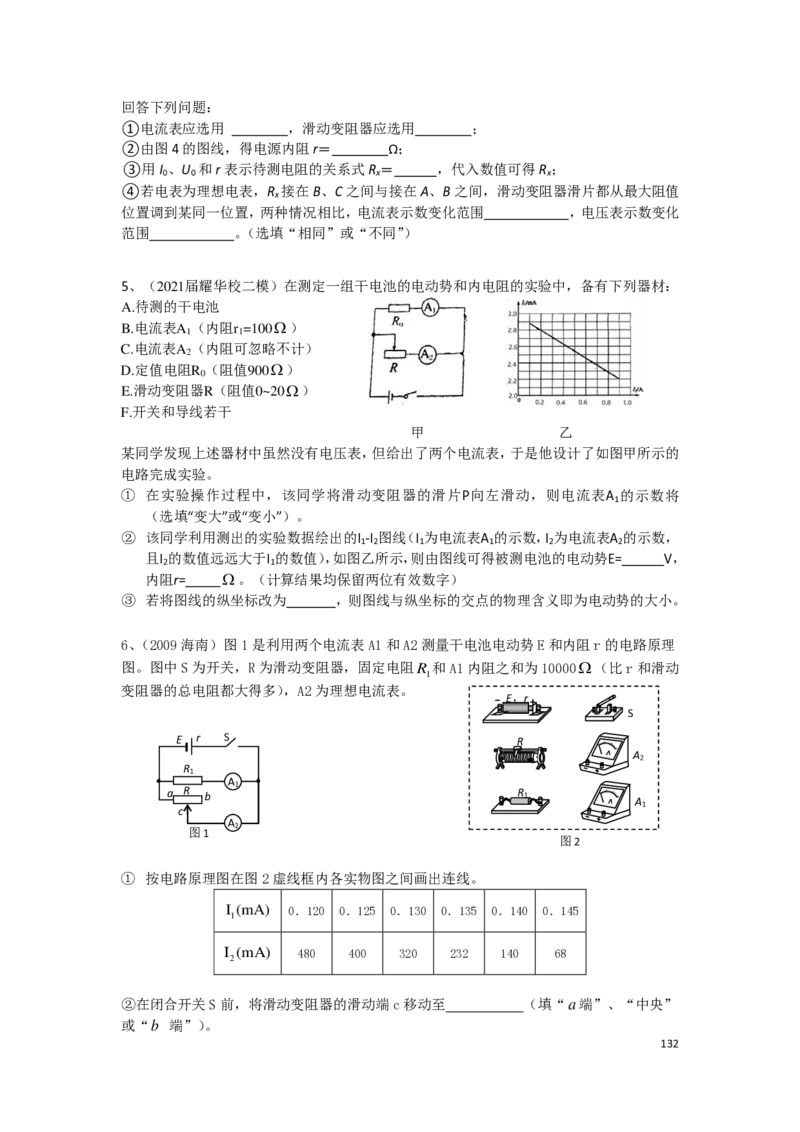
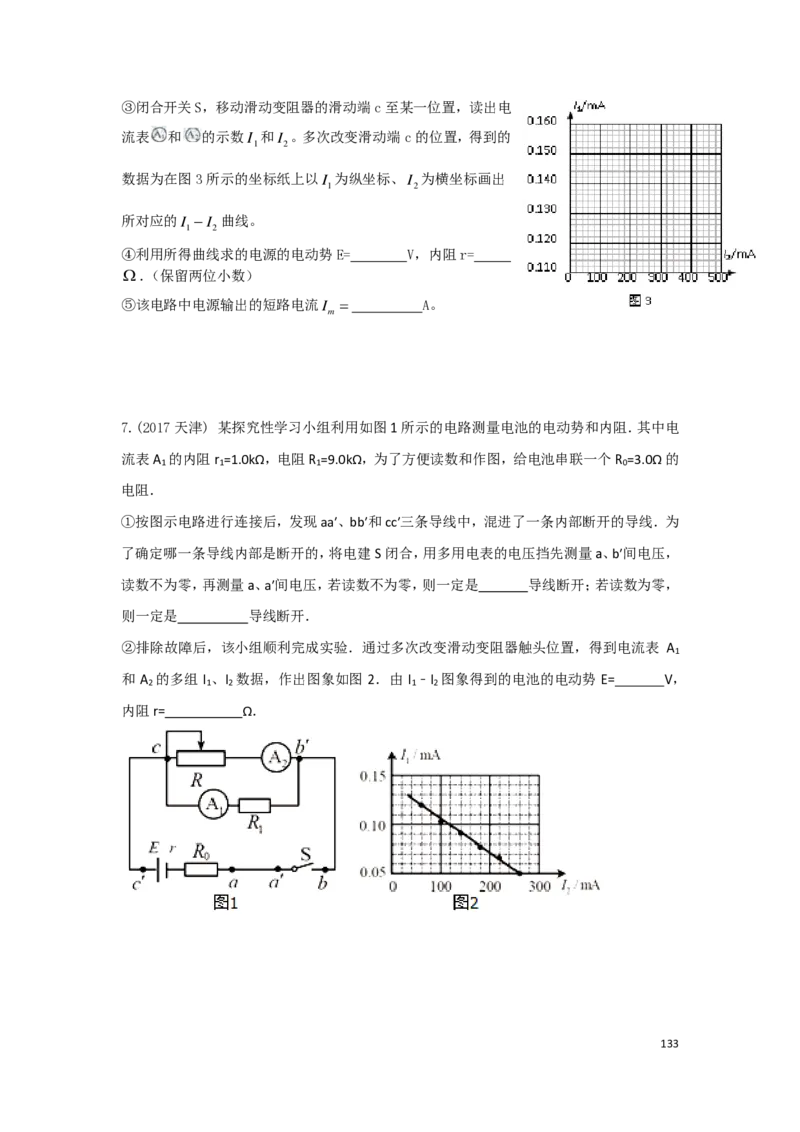
931、(2013新课标2)某同学用量程为1mA、内阻为120Ω 的表头按图(a)所示电路改装成量
程分别为 1V 和 1A 的多用电表。图中 R1 和 R2 为定值电阻,S 为开关。回答下列问题:
(1)根据图(a)所示的电路,在图(b)所示的实物图上连线。
(2)开关S闭合时,多用电表用于测量 (填“电流”、“电压,或“电阻”);
开关S断开时,多用电表用于测量 (填“电流”、“电压”或“电阻”)。
(3)表笔A应为 色(填“红”或“黑”)。
(4)定值电阻的阻值R = Ω,R = Ω。(结果取3位有效数字)
1 2
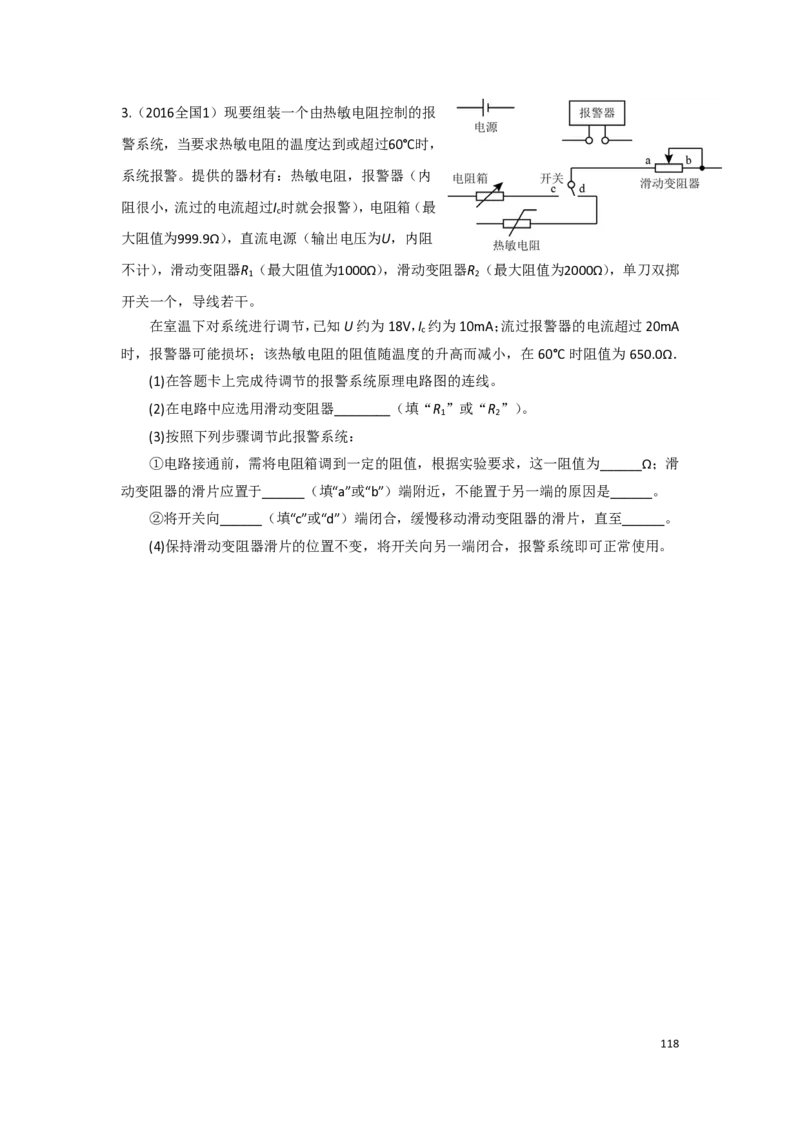
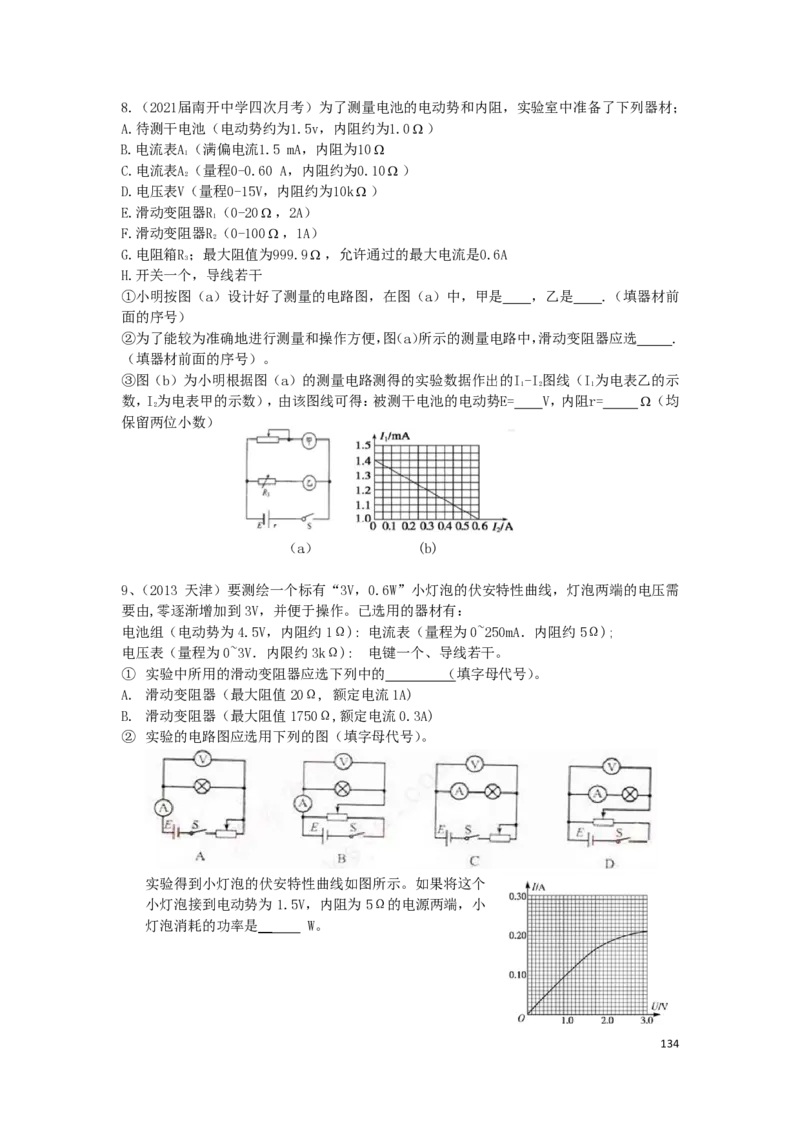
2、(2013海南)某同学将量程为200μA、内阻为500Ω的表头μA改装成量程为1mA和10mA
的双量程电流表,设计电路如图(a)所示。定值电阻 R =500Ω,R 和 R 的值待定,S 为单
1 2 3
刀双掷开关,A、B为接线柱。回答下列问题:
(1)按图(a)在图(b)中将实物连线;
(2)A表笔的颜色为 色(填“红”或“黑”)
(3)将开关S置于“1”挡时,量程为 mA;
(4)定值电阻的阻值R = Ω,R = Ω。(结果取3位有效数字)
2 3
(5)利用改装的电流表进行某次测量时,S置于“2”挡,表头指示如图(c)所示,则所测量
电流的值为 mA。
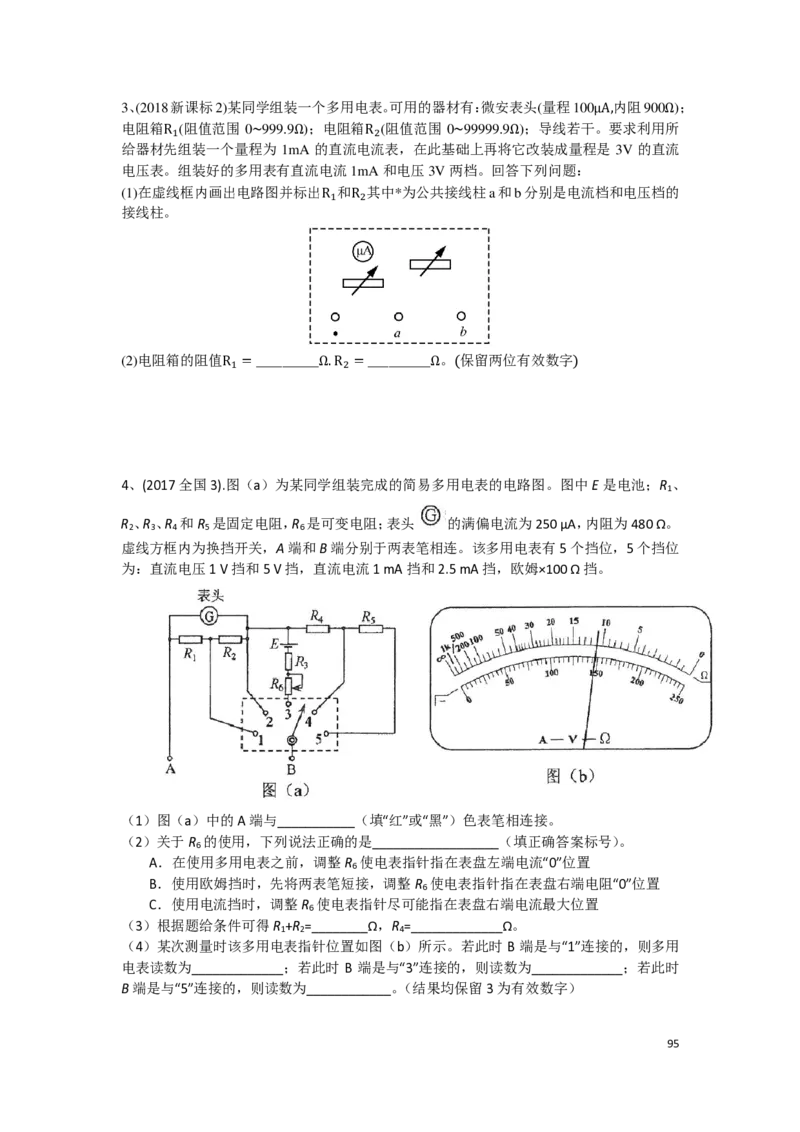
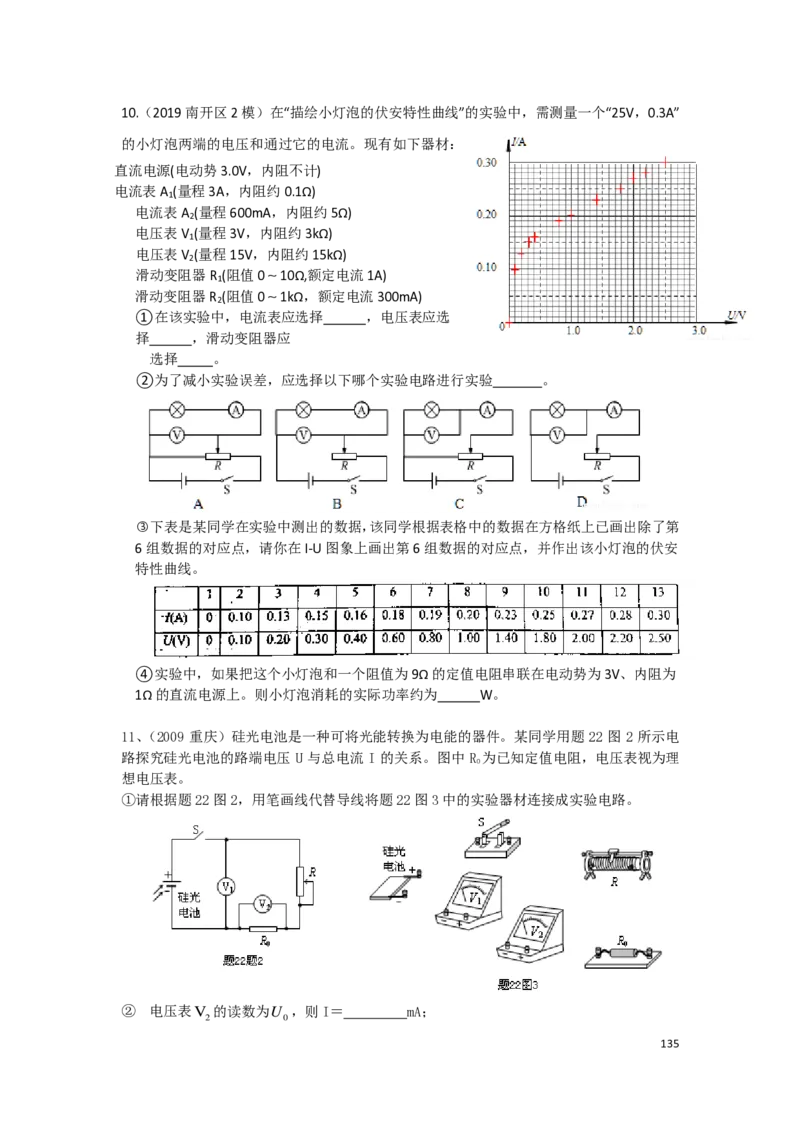
943、(2018新课标2)某同学组装一个多用电表。可用的器材有:微安表头(量程100 内阻900 );
电阻箱 (阻值范围 0 999.9 );电阻箱 (阻值范围 0 99999.9 );导线若干。要求利用所
μA, Ω
给器材先组装一个量程为 1mA 的直流电流表,在此基础上再将它改装成量程是 3V 的直流
R1 ~ Ω R2 ~ Ω
电压表。组装好的多用表有直流电流1mA和电压3V两档。回答下列问题:
(1)在虚线框内画出电路图并标出 和 其中*为公共接线柱a和b分别是电流档和电压档的
接线柱。
R1 R2
(2)电阻箱的阻值 。 保留两位有效数字
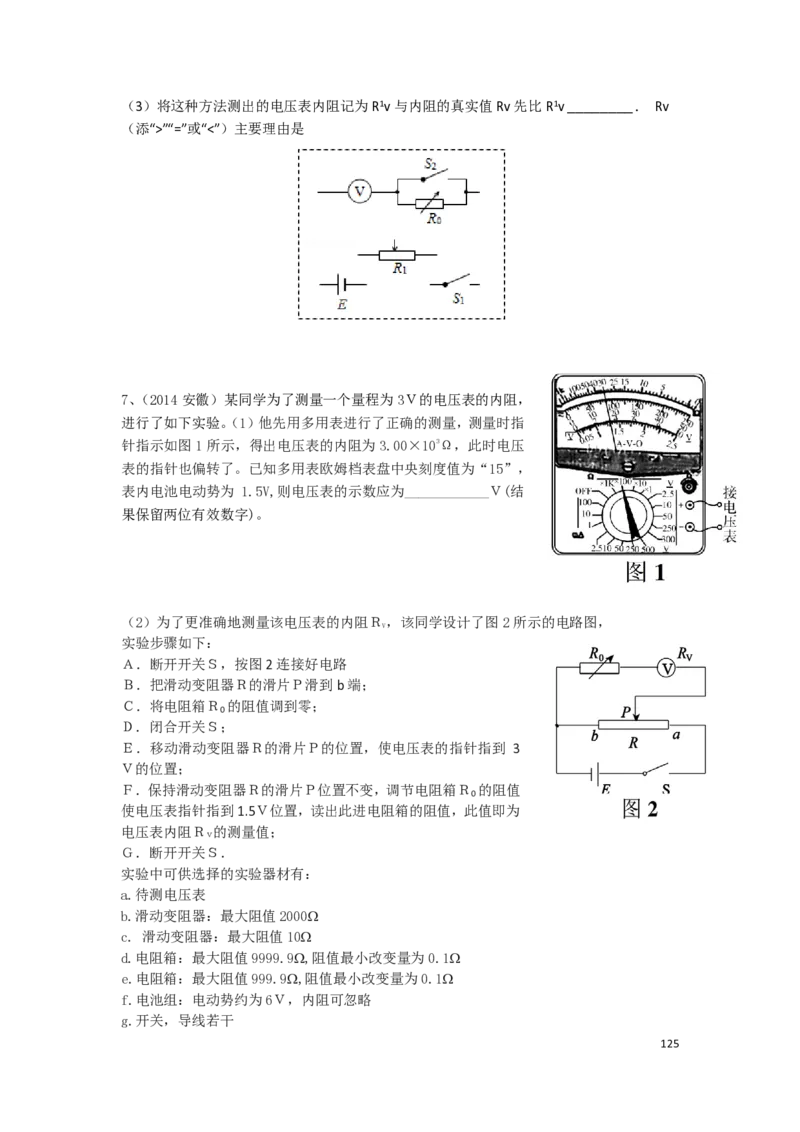
R1 =____________Ω.R2 =____________Ω ( )
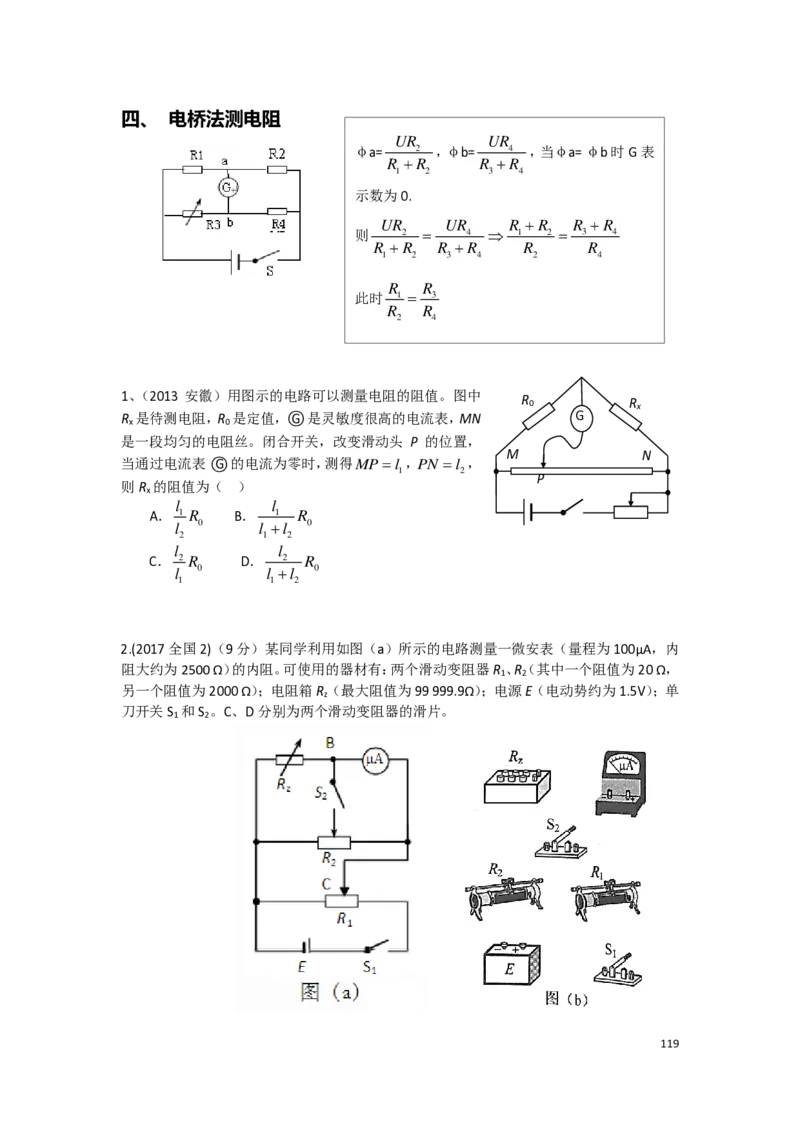
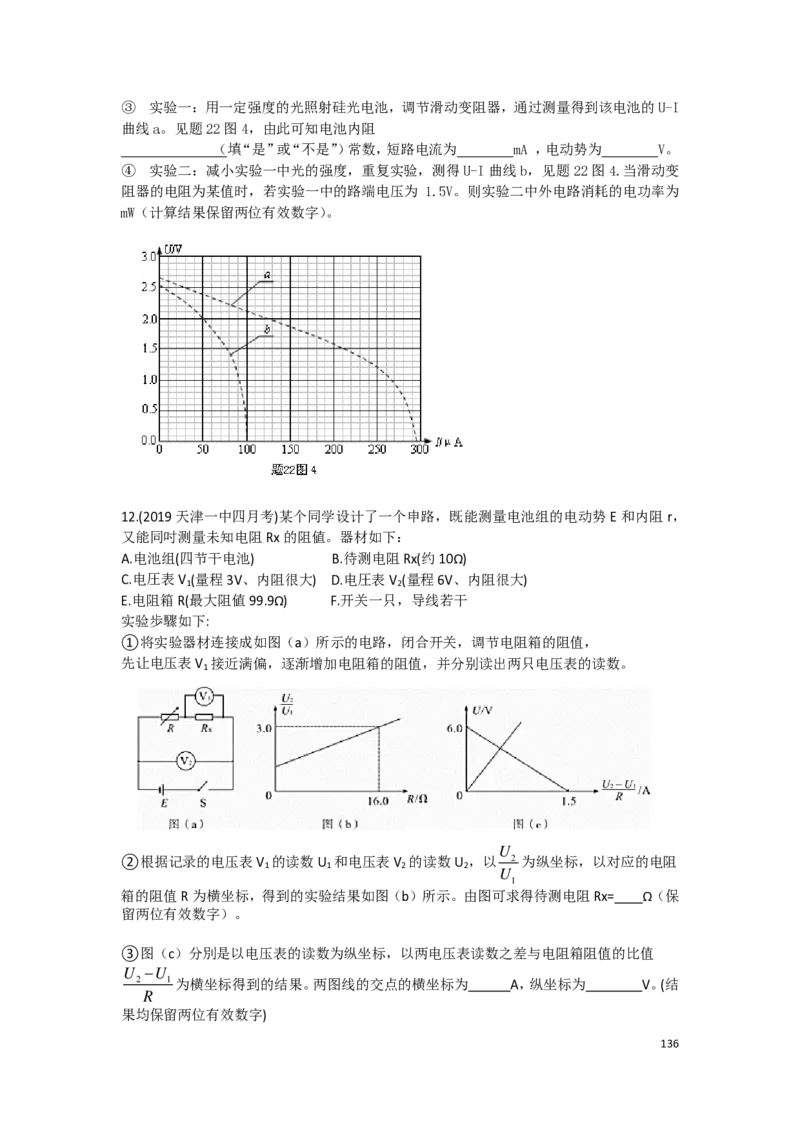
4、(2017全国3).图(a)为某同学组装完成的简易多用电表的电路图。图中E是电池;R 、
1
R 、R 、R 和R 是固定电阻,R 是可变电阻;表头 的满偏电流为250 μA,内阻为480 Ω。
2 3 4 5 6
虚线方框内为换挡开关,A端和B端分别于两表笔相连。该多用电表有5个挡位,5个挡位
为:直流电压1 V挡和5 V挡,直流电流1 mA挡和2.5 mA挡,欧姆×100 Ω挡。
(1)图(a)中的A端与___________(填“红”或“黑”)色表笔相连接。
(2)关于R 的使用,下列说法正确的是__________________(填正确答案标号)。
6
A.在使用多用电表之前,调整R 使电表指针指在表盘左端电流“0”位置
6
B.使用欧姆挡时,先将两表笔短接,调整R 使电表指针指在表盘右端电阻“0”位置
6
C.使用电流挡时,调整R 使电表指针尽可能指在表盘右端电流最大位置
6
(3)根据题给条件可得R +R =________Ω,R =_____________Ω。
1 2 4
(4)某次测量时该多用电表指针位置如图(b)所示。若此时 B 端是与“1”连接的,则多用
电表读数为_____________;若此时 B 端是与“3”连接的,则读数为_____________;若此时
B端是与“5”连接的,则读数为____________。(结果均保留3为有效数字)
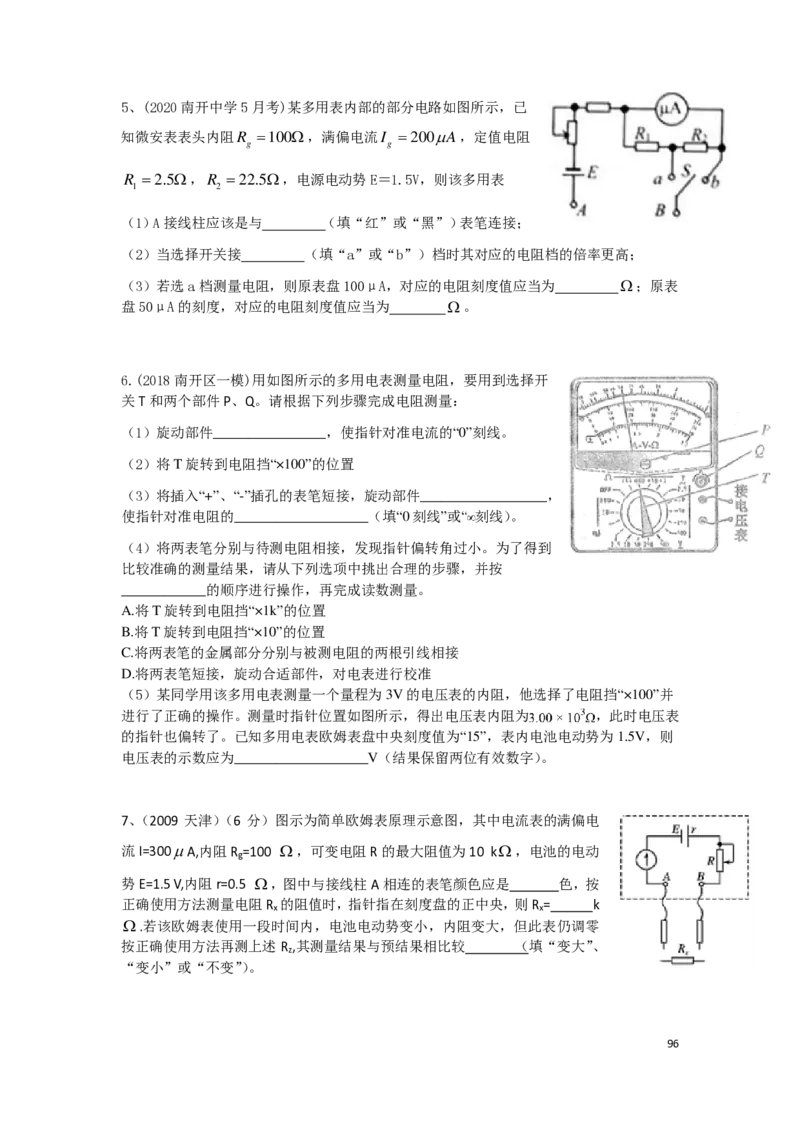
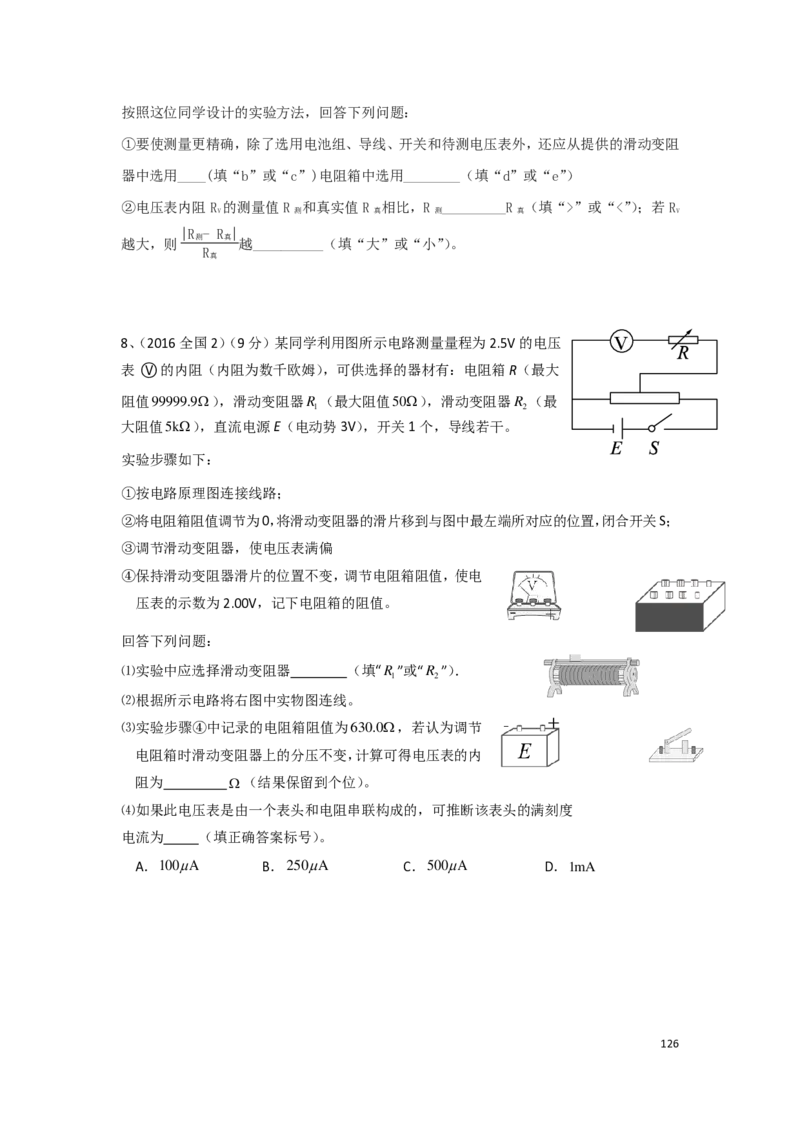
955、(2020南开中学5月考)某多用表内部的部分电路如图所示,已
知微安表表头内阻R =100Ω,满偏电流I =200µA,定值电阻
g g
R =2.5Ω,R =22.5Ω,电源电动势E=1.5V,则该多用表
1 2
(1)A接线柱应该是与 (填“红”或“黑”)表笔连接;
(2)当选择开关接 (填“a”或“b”)档时其对应的电阻档的倍率更高;
(3)若选a档测量电阻,则原表盘100μA,对应的电阻刻度值应当为 Ω;原表
盘50μA的刻度,对应的电阻刻度值应当为 Ω。
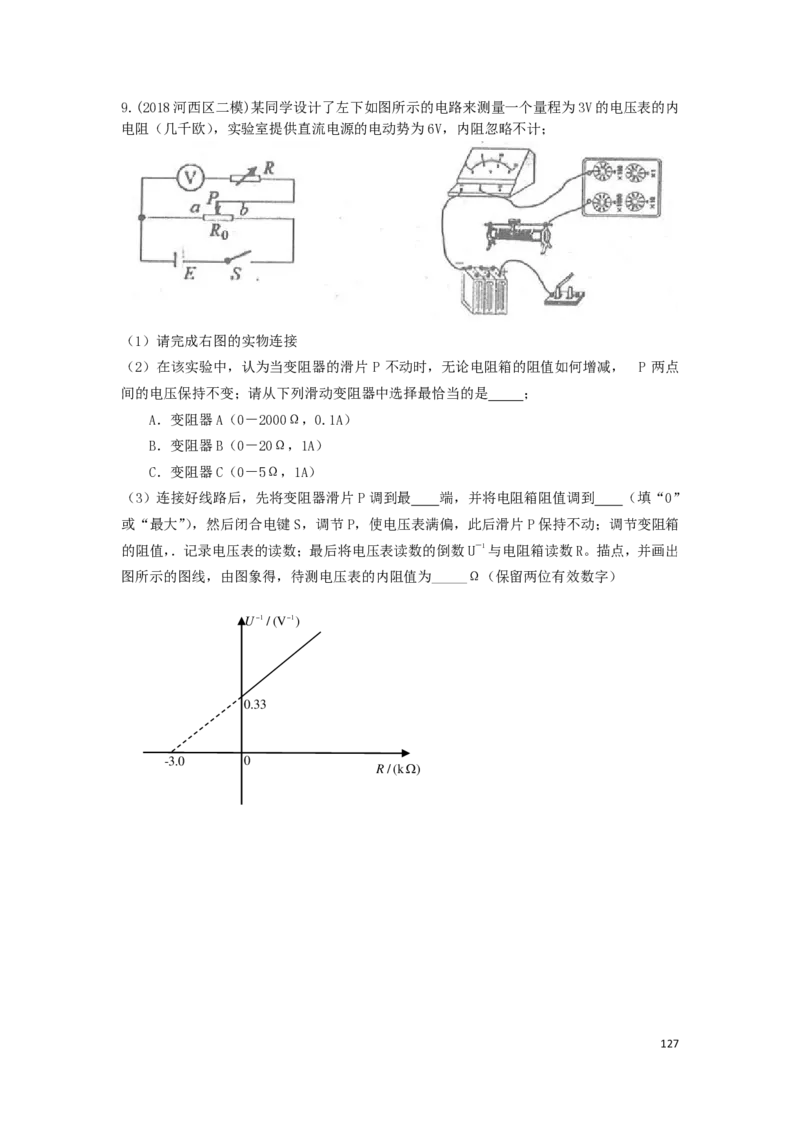
6.(2018南开区一模)用如图所示的多用电表测量电阻,要用到选择开
关T和两个部件P、Q。请根据下列步骤完成电阻测量:
(1)旋动部件________________,使指针对准电流的“0”刻线。
(2)将T旋转到电阻挡“×100”的位置
(3)将插入“+”、“-”插孔的表笔短接,旋动部件__________________,
使指针对准电阻的___________________(填“0刻线”或“ 刻线)。
(4)将两表笔分别与待测电阻相接,发现指针偏转角过小。为了得到
比较准确的测量结果,请从下列选项中挑出合理的步骤,并按
____________的顺序进行操作,再完成读数测量。
A.将T旋转到电阻挡“×1k”的位置
B.将T旋转到电阻挡“×10”的位置
C.将两表笔的金属部分分别与被测电阻的两根引线相接
D.将两表笔短接,旋动合适部件,对电表进行校准
(5)某同学用该多用电表测量一个量程为3V的电压表的内阻,他选择了电阻挡“×100”并
进行了正确的操作。测量时指针位置如图所示,得出电压表内阻为 ,此时电压表
的指针也偏转了。已知多用电表欧姆表盘中央刻度值为“15”,表内电池电动势为1.5V,则
电压表的示数应为___________________V(结果保留两位有效数字)。
7、(2009 天津)(6 分)图示为简单欧姆表原理示意图,其中电流表的满偏电
流I=300µA,内阻R =100 Ω,可变电阻R的最大阻值为10 kΩ,电池的电动
g
势E=1.5 V,内阻r=0.5 Ω,图中与接线柱A相连的表笔颜色应是 色,按
正确使用方法测量电阻R 的阻值时,指针指在刻度盘的正中央,则R = k
x x
Ω.若该欧姆表使用一段时间内,电池电动势变小,内阻变大,但此表仍调零
按正确使用方法再测上述 R,其测量结果与预结果相比较 (填“变大”、
z
“变小”或“不变”)。
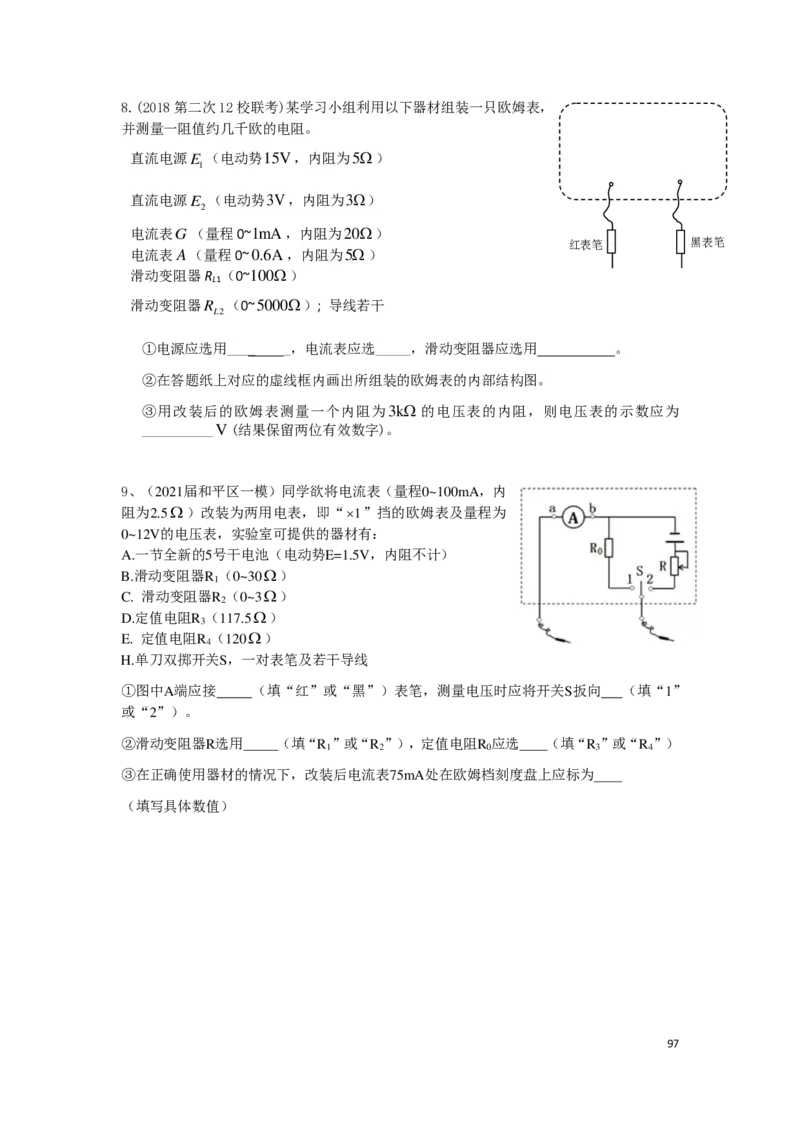
968.(2018第二次12校联考)某学习小组利用以下器材组装一只欧姆表,
并测量一阻值约几千欧的电阻。
直流电源E (电动势15V,内阻为5Ω)
1
直流电源E (电动势3V,内阻为3Ω)
2
电流表G(量程0~1mA,内阻为20Ω)
红表笔 黑表笔
电流表A(量程0~0.6A,内阻为5Ω)
滑动变阻器R (0~100Ω)
L1
滑动变阻器R (0~5000Ω); 导线若干
L2
①电源应选用____ _,电流表应选_____,滑动变阻器应选用 。
②在答题纸上对应的虚线框内画出所组装的欧姆表的内部结构图。
③用改装后的欧姆表测量一个内阻为3kΩ 的电压表的内阻,则电压表的示数应为
__________V(结果保留两位有效数字)。
9、(2021届和平区一模)同学欲将电流表(量程0~100mA,内
阻为2.5Ω)改装为两用电表,即“×1”挡的欧姆表及量程为
0~12V的电压表,实验室可提供的器材有:
A.一节全新的5号干电池(电动势E=1.5V,内阻不计)
B.滑动变阻器R (0~30Ω)
1
C. 滑动变阻器R (0~3Ω)
2
D.定值电阻R (117.5Ω)
3
E. 定值电阻R (120Ω)
4
H.单刀双掷开关S,一对表笔及若干导线
①图中A端应接 (填“红”或“黑”)表笔,测量电压时应将开关S扳向 (填“1”
或“2”)。
②滑动变阻器R选用 (填“R ”或“R ”),定值电阻R 应选 (填“R ”或“R ”)
1 2 0 3 4
③在正确使用器材的情况下,改装后电流表75mA处在欧姆档刻度盘上应标为
(填写具体数值)
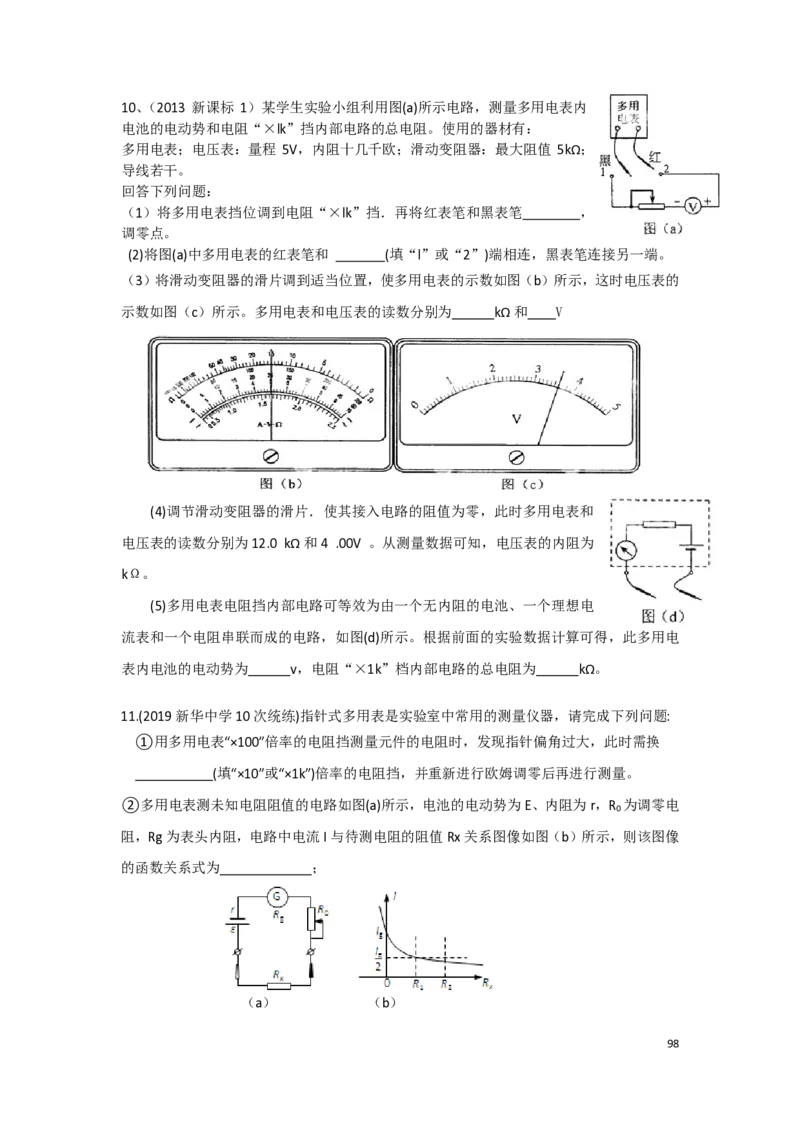
9710、(2013 新课标 1)某学生实验小组利用图(a)所示电路,测量多用电表内
电池的电动势和电阻“×lk”挡内部电路的总电阻。使用的器材有:
多用电表;电压表:量程 5V,内阻十几千欧;滑动变阻器:最大阻值 5kΩ;
导线若干。
回答下列问题:
(1)将多用电表挡位调到电阻“×lk”挡.再将红表笔和黑表笔 ,
调零点。
(2)将图(a)中多用电表的红表笔和 (填“l”或“2”)端相连,黑表笔连接另一端。
(3)将滑动变阻器的滑片调到适当位置,使多用电表的示数如图(b)所示,这时电压表的
示数如图(c)所示。多用电表和电压表的读数分别为 kΩ和 V
(4)调节滑动变阻器的滑片.使其接入电路的阻值为零,此时多用电表和
电压表的读数分别为12.0 kΩ和4 .00V 。从测量数据可知,电压表的内阻为
kΩ。
(5)多用电表电阻挡内部电路可等效为由一个无内阻的电池、一个理想电
流表和一个电阻串联而成的电路,如图(d)所示。根据前面的实验数据计算可得,此多用电
表内电池的电动势为 v,电阻“×1k”档内部电路的总电阻为 kΩ。
11.(2019新华中学10次统练)指针式多用表是实验室中常用的测量仪器,请完成下列问题:
①用多用电表“×100”倍率的电阻挡测量元件的电阻时,发现指针偏角过大,此时需换
(填“×10”或“×1k”)倍率的电阻挡,并重新进行欧姆调零后再进行测量。
②多用电表测未知电阻阻值的电路如图(a)所示,电池的电动势为E、内阻为r,R 为调零电
0
阻,Rg为表头内阻,电路中电流I与待测电阻的阻值Rx关系图像如图(b)所示,则该图像
的函数关系式为 ;
(a) (b)
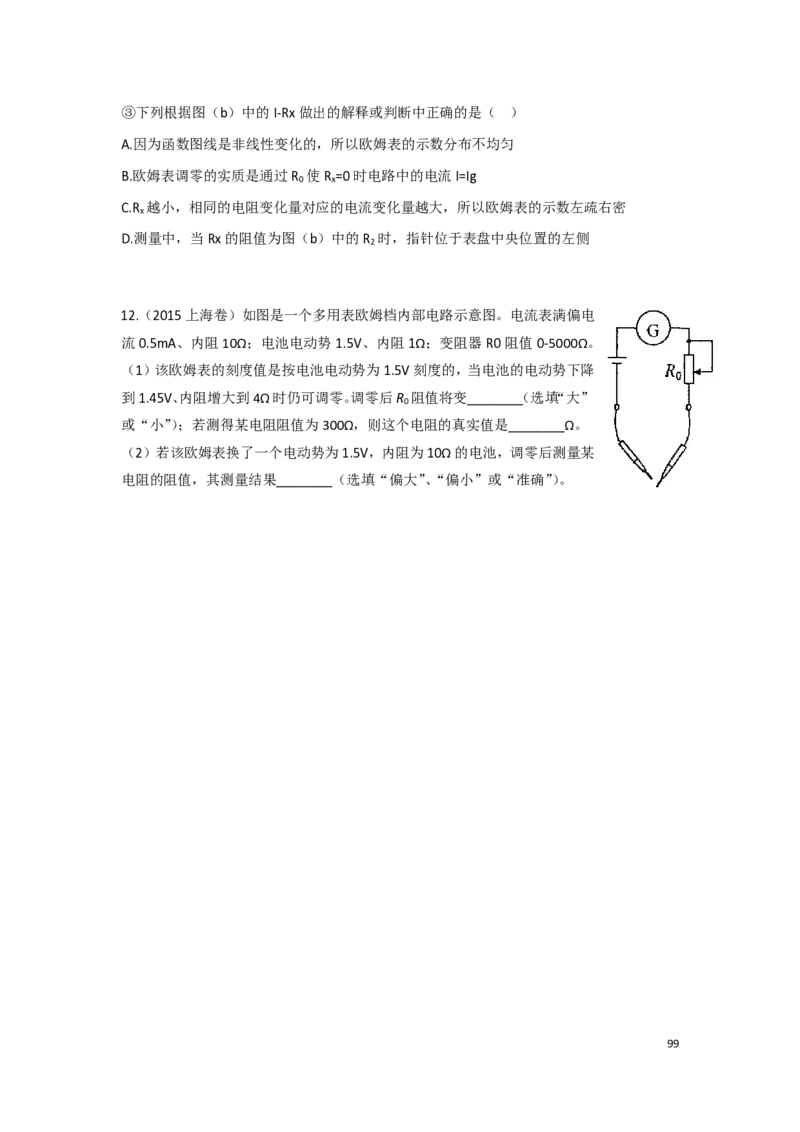
98③下列根据图(b)中的I-Rx做出的解释或判断中正确的是( )
A.因为函数图线是非线性变化的,所以欧姆表的示数分布不均匀
B.欧姆表调零的实质是通过R 使R =0时电路中的电流I=Ig
0 x
C.R 越小,相同的电阻变化量对应的电流变化量越大,所以欧姆表的示数左疏右密
x
D.测量中,当Rx的阻值为图(b)中的R 时,指针位于表盘中央位置的左侧
2
12.(2015上海卷)如图是一个多用表欧姆档内部电路示意图。电流表满偏电
流0.5mA、内阻10Ω;电池电动势1.5V、内阻1Ω;变阻器R0阻值0-5000Ω。
(1)该欧姆表的刻度值是按电池电动势为1.5V刻度的,当电池的电动势下降
到1.45V、内阻增大到4Ω时仍可调零。调零后R 阻值将变________(选填“大”
0
或“小”);若测得某电阻阻值为300Ω,则这个电阻的真实值是________Ω。
(2)若该欧姆表换了一个电动势为1.5V,内阻为10Ω的电池,调零后测量某
电阻的阻值,其测量结果________(选填“偏大”、“偏小”或“准确”)。
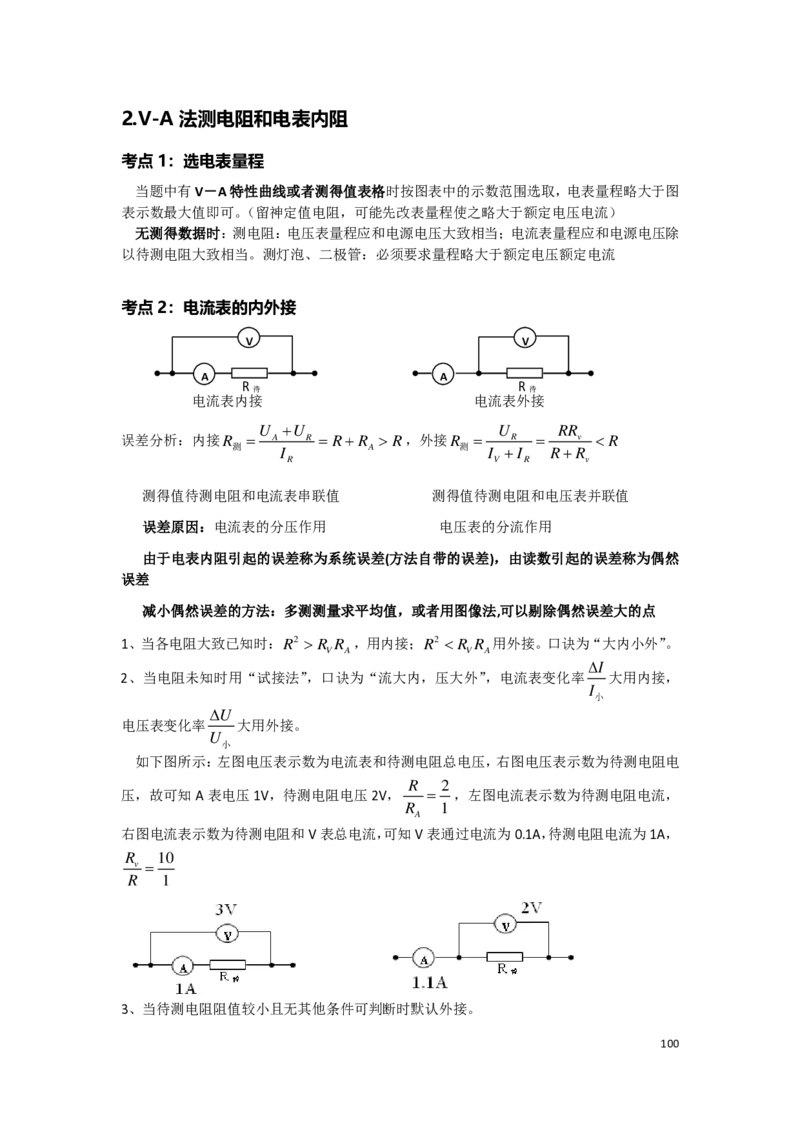
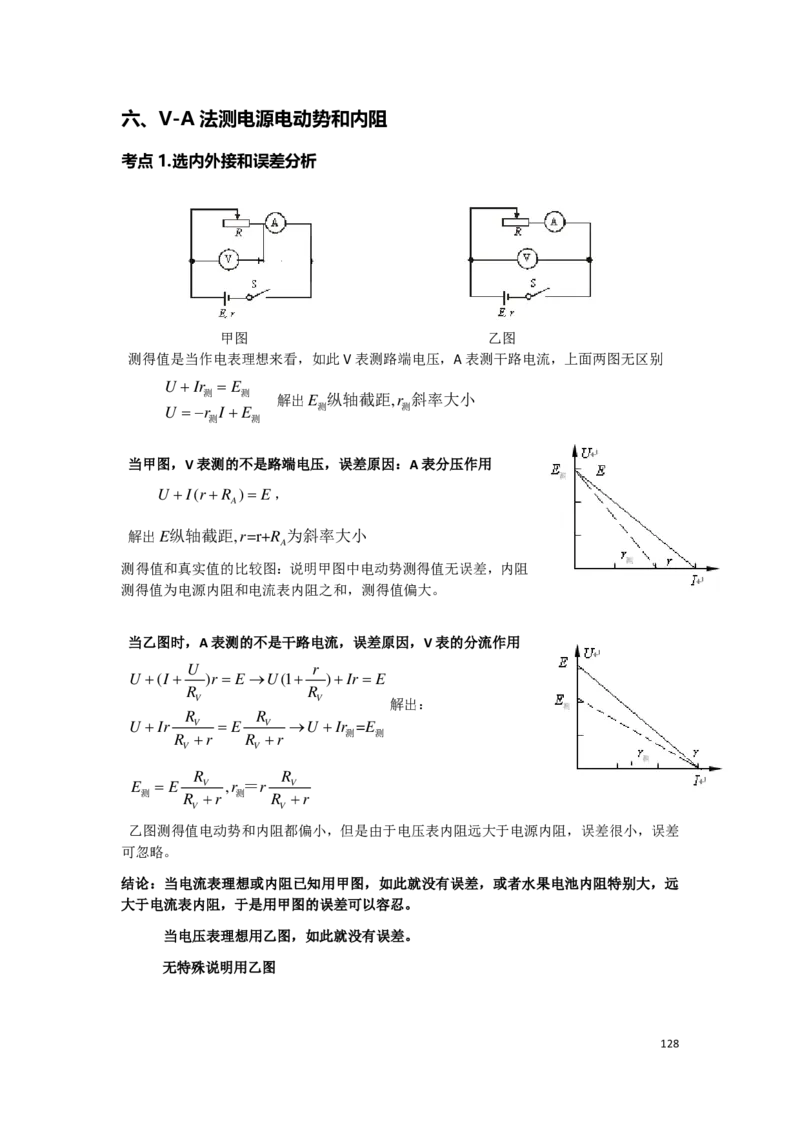
992.V-A 法测电阻和电表内阻
考点1:选电表量程
当题中有V-A特性曲线或者测得值表格时按图表中的示数范围选取,电表量程略大于图
表示数最大值即可。(留神定值电阻,可能先改表量程使之略大于额定电压电流)
无测得数据时:测电阻:电压表量程应和电源电压大致相当;电流表量程应和电源电压除
以待测电阻大致相当。测灯泡、二极管:必须要求量程略大于额定电压额定电流
考点2:电流表的内外接
V V
A A
R R
待 待
电流表内接 电流表外接
U +U U RR
误差分析:内接R = A R = R+R > R,外接R = R = v < R
测 I A 测 I +I R+R
R V R v
测得值待测电阻和电流表串联值 测得值待测电阻和电压表并联值
误差原因:电流表的分压作用 电压表的分流作用
由于电表内阻引起的误差称为系统误差(方法自带的误差),由读数引起的误差称为偶然
误差
减小偶然误差的方法:多测测量求平均值,或者用图像法,可以剔除偶然误差大的点
1、当各电阻大致已知时:R2 > R R ,用内接;R2 < R R 用外接。口诀为“大内小外”。
V A V A
∆I
2、当电阻未知时用“试接法”,口诀为“流大内,压大外”,电流表变化率 大用内接,
I
小
∆U
电压表变化率 大用外接。
U
小
如下图所示:左图电压表示数为电流表和待测电阻总电压,右图电压表示数为待测电阻电
R 2
压,故可知A表电压1V,待测电阻电压2V, = ,左图电流表示数为待测电阻电流,
R 1
A
右图电流表示数为待测电阻和V表总电流,可知V表通过电流为0.1A,待测电阻电流为1A,
R 10
v =
R 1
3、当待测电阻阻值较小且无其他条件可判断时默认外接。
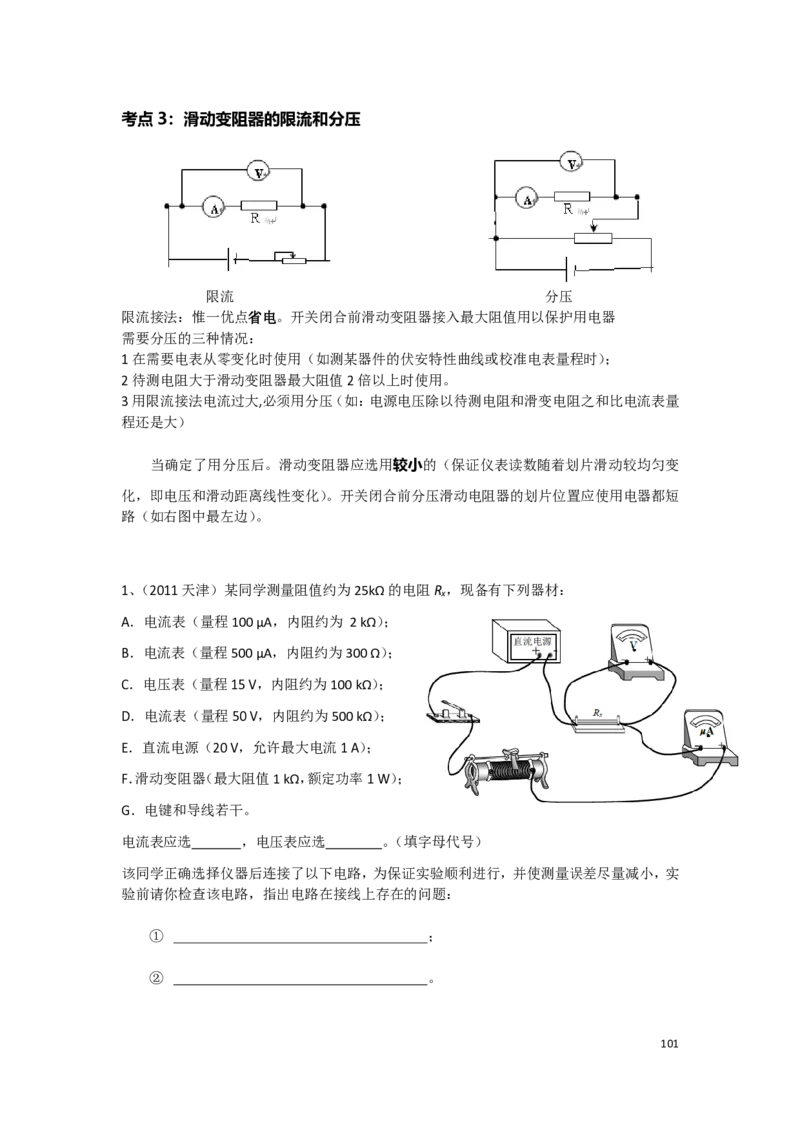
100考点3:滑动变阻器的限流和分压
限流 分压
限流接法:惟一优点省电。开关闭合前滑动变阻器接入最大阻值用以保护用电器
需要分压的三种情况:
1在需要电表从零变化时使用(如测某器件的伏安特性曲线或校准电表量程时);
2待测电阻大于滑动变阻器最大阻值2倍以上时使用。
3用限流接法电流过大,必须用分压(如:电源电压除以待测电阻和滑变电阻之和比电流表量
程还是大)
当确定了用分压后。滑动变阻器应选用较小的(保证仪表读数随着划片滑动较均匀变
化,即电压和滑动距离线性变化)。开关闭合前分压滑动电阻器的划片位置应使用电器都短
路(如右图中最左边)。
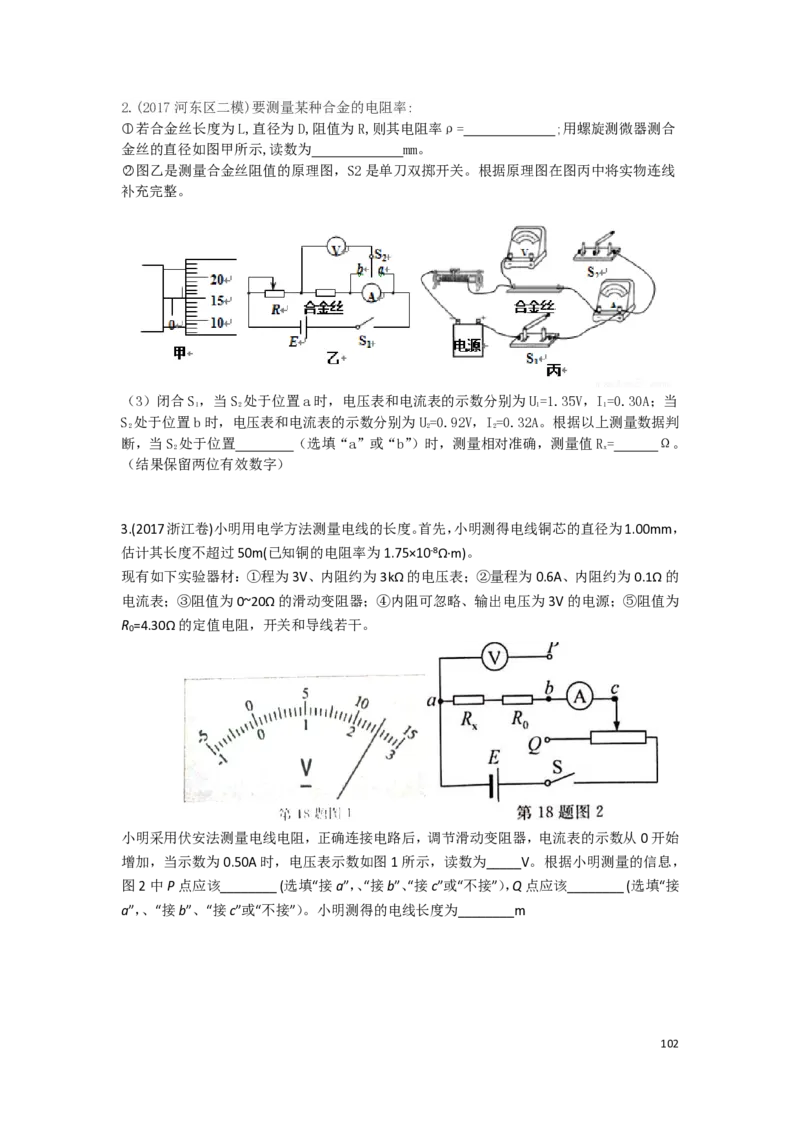
1、(2011天津)某同学测量阻值约为25kΩ的电阻R,现备有下列器材:
x
A.电流表(量程100 μA,内阻约为 2 kΩ);
B.电流表(量程500 μA,内阻约为300 Ω);
C.电压表(量程15 V,内阻约为100 kΩ);
D.电流表(量程50 V,内阻约为500 kΩ);
E.直流电源(20 V,允许最大电流1 A);
F.滑动变阻器(最大阻值1 kΩ,额定功率1 W);
G.电键和导线若干。
电流表应选 ,电压表应选 。(填字母代号)
该同学正确选择仪器后连接了以下电路,为保证实验顺利进行,并使测量误差尽量减小,实
验前请你检查该电路,指出电路在接线上存在的问题:
① ;
② 。
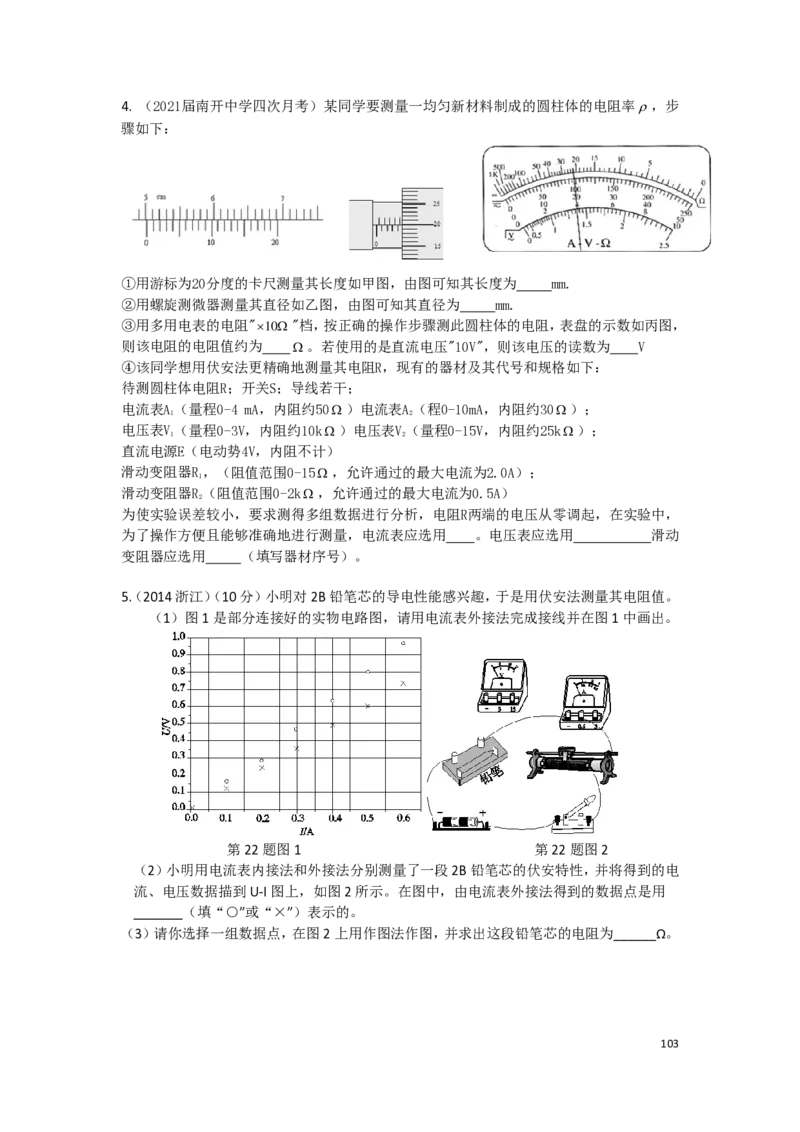
1012.(2017河东区二模)要测量某种合金的电阻率:
○1若合金丝长度为L,直径为D,阻值为R,则其电阻率ρ= ;用螺旋测微器测合
EA
金丝的直径如图甲所示,读数为 mm。
○2图乙是测量合金丝阻值的原理图,S2是单刀双掷开关。根据原理图在图丙中将实物连线
A EA
补充完整。
(3)闭合S,当S 处于位置a时,电压表和电流表的示数分别为U=1.35V,I=0.30A;当
1 2 1 1
S 处于位置b时,电压表和电流表的示数分别为U=0.92V,I=0.32A。根据以上测量数据判
2 2 2
断,当S 处于位置 (选填“a”或“b”)时,测量相对准确,测量值R= Ω。
2 x
(结果保留两位有效数字)
3.(2017浙江卷)小明用电学方法测量电线的长度。首先,小明测得电线铜芯的直径为1.00mm,
估计其长度不超过50m(已知铜的电阻率为1.75×10-8Ω·m)。
现有如下实验器材:①程为3V、内阻约为3kΩ的电压表;②量程为0.6A、内阻约为0.1Ω的
电流表;③阻值为0~20Ω的滑动变阻器;④内阻可忽略、输出电压为3V的电源;⑤阻值为
R =4.30Ω的定值电阻,开关和导线若干。
0
小明采用伏安法测量电线电阻,正确连接电路后,调节滑动变阻器,电流表的示数从0开始
增加,当示数为0.50A时,电压表示数如图1所示,读数为_____V。根据小明测量的信息,
图2中P点应该________ (选填“接a”,、“接b”、“接c”或“不接”),Q点应该________ (选填“接
a”,、“接b”、“接c”或“不接”)。小明测得的电线长度为________m
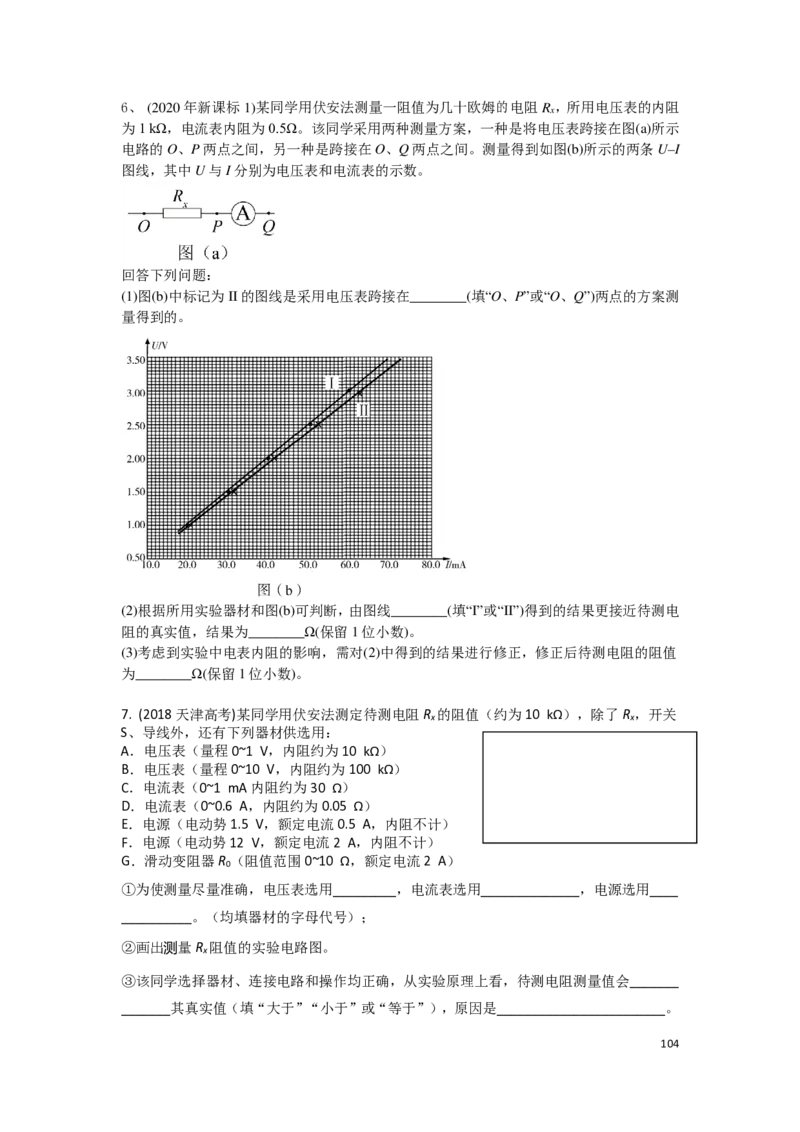
1024. (2021届南开中学四次月考)某同学要测量一均匀新材料制成的圆柱体的电阻率ρ,步
骤如下:
①用游标为20分度的卡尺测量其长度如甲图,由图可知其长度为 mm.
②用螺旋测微器测量其直径如乙图,由图可知其直径为 mm.
③用多用电表的电阻"×10Ω"档,按正确的操作步骤测此圆柱体的电阻,表盘的示数如丙图,
则该电阻的电阻值约为 Ω。若使用的是直流电压"10V",则该电压的读数为 V
④该同学想用伏安法更精确地测量其电阻R,现有的器材及其代号和规格如下:
待测圆柱体电阻R;开关S;导线若干;
电流表A(量程0-4 mA,内阻约50Ω)电流表A(程0-10mA,内阻约30Ω);
1 2
电压表V(量程0-3V,内阻约10kΩ)电压表V(量程0-15V,内阻约25kΩ);
1 2
直流电源E(电动势4V,内阻不计)
滑动变阻器R,(阻值范围0-15Ω,允许通过的最大电流为2.0A);
1
滑动变阻器R(阻值范围0-2kΩ,允许通过的最大电流为0.5A)
2
为使实验误差较小,要求测得多组数据进行分析,电阻R两端的电压从零调起,在实验中,
为了操作方便且能够准确地进行测量,电流表应选用 。电压表应选用 滑动
变阻器应选用 (填写器材序号)。
5.(2014浙江)(10分)小明对2B铅笔芯的导电性能感兴趣,于是用伏安法测量其电阻值。
(1)图1是部分连接好的实物电路图,请用电流表外接法完成接线并在图1中画出。
第22题图1 第22题图2
(2)小明用电流表内接法和外接法分别测量了一段2B铅笔芯的伏安特性,并将得到的电
流、电压数据描到U-I图上,如图2所示。在图中,由电流表外接法得到的数据点是用
_______(填“○”或“×”)表示的。
(3)请你选择一组数据点,在图2上用作图法作图,并求出这段铅笔芯的电阻为______Ω。
1036、 (2020年新课标1)某同学用伏安法测量一阻值为几十欧姆的电阻R ,所用电压表的内阻
x
为1 kΩ,电流表内阻为0.5Ω。该同学采用两种测量方案,一种是将电压表跨接在图(a)所示
电路的O、P两点之间,另一种是跨接在O、Q两点之间。测量得到如图(b)所示的两条U–I
图线,其中U与I分别为电压表和电流表的示数。
回答下列问题:
(1)图(b)中标记为II的图线是采用电压表跨接在________(填“O、P”或“O、Q”)两点的方案测
量得到的。
(2)根据所用实验器材和图(b)可判断,由图线________(填“I”或“II”)得到的结果更接近待测电
阻的真实值,结果为________Ω(保留1位小数)。
(3)考虑到实验中电表内阻的影响,需对(2)中得到的结果进行修正,修正后待测电阻的阻值
为________Ω(保留1位小数)。
7. (2018天津高考)某同学用伏安法测定待测电阻R 的阻值(约为10 kΩ),除了R ,开关
x x
S、导线外,还有下列器材供选用:
A.电压表(量程0~1 V,内阻约为10 kΩ)
B.电压表(量程0~10 V,内阻约为100 kΩ)
C.电流表(0~1 mA内阻约为30 Ω)
D.电流表(0~0.6 A,内阻约为0.05 Ω)
E.电源(电动势1.5 V,额定电流0.5 A,内阻不计)
F.电源(电动势12 V,额定电流2 A,内阻不计)
G.滑动变阻器R (阻值范围0~10 Ω,额定电流2 A)
0
①为使测量尽量准确,电压表选用_________,电流表选用______________,电源选用____
__________。(均填器材的字母代号);
②画出测量R 阻值的实验电路图。
x
③该同学选择器材、连接电路和操作均正确,从实验原理上看,待测电阻测量值会_______
_______其真实值(填“大于”“小于”或“等于”),原因是________________________。
1048、(2012四川)某学习小组的同学拟探究小灯泡L的伏安特性曲线,可供选用的器材如下:
小灯泡L,规格“4.0V,0.7A”;
电流表A ,量程3A,内阻约为0.1Ω;
1
电流表A ,量程0.6A,内阻r =0.2Ω;
2 2
电压表V,量程3V,内阻r =9kΩ;
v
标准电阻R ,阻值1Ω;
1
标准电阻R ,阻值3kΩ;
2
滑动变阻器R ,阻值范围0~10Ω;
学生电源E,电动势6V,内阻不计;
开关S及导线若干。
①甲同学设计了如图1所示的电路来进行测量,当通过L的电流为
0.46A 时,电压表的示数如图 2 所示,此时 L 的电阻为
________________Ω。
②乙同学又设计了如图3所示的电路来进行测量,电压表指针指在
最大刻度时,加在L上的电压值是_________________V。
③学习小组认为要想更准确地描绘出L完整的伏安特性曲线,需要重新设计电路。请你在乙
同学的基础上利用所供器材,在图4所示的虚线框内补画出实验电路图,并在图上标明所选
器材代号。
9.(2018河西一模)某小组同学通过实验测量金属丝的电阻率,现有的器材规格如下:
A.待测金属丝电阻 (大约 ,长度为L)
B.直流电流表A (量程 ,内阻约 )
1
C.直流电流表A (量程 ,内阻约 )
2
D.直流电压表V(量程 ,内阻为 )
E.定值电阻
F.直流电源(输出电压6V,内阻不计)
G.滑动变阻器R(阻值范围 ,允许最大电流2A)
H.开关一个、导线若干
①用螺旋测微器测量金属丝的直径d,示数如图所示,读数为_ ____mm;
②根据器材的规格和实验要求,为了减小测量误差,直流电流表应选___ __(填选项前的
字母);
105③在方框内画出实验电路图 (要求电压和电流的变化范围尽可能大一些);
④某次测量中,电流表的读数为I,电压表的读数为U,则该金属丝的电阻率表达式为
______(用题中所给物理量的字母表示并忽略电表内阻的影响)。
10、(2016 天津)某同学想要描绘标有“3.8V,0.3A”字样小灯泡 L 的伏安特性曲线,要求
测量数据尽量精确,绘制曲线完整,可供该同学选用的器材除了开关,导线外,还有:
电压表V (量程0~3V,内阻等于3kΩ)电压表V (量程0~15V,内阻等于15kΩ)
1 2
电流表A (量程0~200mA,内阻等于10Ω)电流表A (量程0~3A,内阻等于0.1Ω)
1 2
滑动变阻器R (0~10Ω,额定电流2A)滑动变阻器R (0~1kΩ,额定电流0.5A)
1 2
定值电阻R(阻值等于1Ω)定值电阻R(阻值等于10Ω) 定值电阻R (阻值等于1 kΩ )
3 4 5
电源E (E=6V,内阻不计)
①请画出实验电路图,并将各元件字母代码标在该元件的符号旁
③ 该同学描绘出的I-U图像应是下图中的______
10611、(2014天津)现要测量一个未知电阻R 的阻值,除R 外可用的器材有:
x x
多用的电表(仅可使用欧姆挡);
一个电池组E(电动势6V);
一个滑动变阻器R(0~20Ω,额定电流1A);
两个相同的电流表G(内阻R =1000Ω,满偏电流I =100µA);
g g
两个标准电阻(R =29000Ω,R =0.1Ω);
1 2
一个电键S、导线若干。
①为了设计电路,先用多用电表的欧姆挡粗测未知电阻,采用“×10”挡,调零后测量该
电阻,发现指针偏角非常大,最后几乎紧挨满偏刻度停下来,下列判断和做法正确的
是 (填字母代号)。
A.这个电阻阻值很小,估计只有几欧姆
B.这个电阻阻值很大,估计有几千欧姆
C.如需进一步测量可换“×1”挡,调零后测量
D. 如需进一步测量可换“×1k”挡,调零后测量
②根据粗测的判断,设计一个测量电路,要求测量尽量准确并使电路能耗较小,画出实
验电路图,并将各元件字母代码标在该元件的符号旁。
12. (2020年新课标2)某同学要研究一小灯泡L(3.6 V,0.30 A)的伏安特性。所用器材有:电
流表A (量程200 mA,内阻R =10.0 Ω),电流表A (量程500 mA,内阻R =1.0 Ω)、定值
1 g1 2 g2
电阻R (阻值R =10.0 Ω)、滑动变阻器R (最大阻值10 Ω)、电源E(电动势4.5 V,内阻很小)、
0 0 1
开关S和若干导线。该同学设计的电路如图(a)所示。
(1)根据图(a),在图(b)的实物图中画出连线______。
(2)若I 、I 分别为流过电流表A 和A 的电流,利用I 、I 、R 和R 写出:小灯泡两端的
1 2 1 2 1 2 g1 0
电压U=_______,流过小灯泡的电流I=_______。为保证小灯泡的安全,I 不能超过
1
_______mA。
107(3)实验时,调节滑动变阻器,使开关闭合后两电流表的示数为零。逐次改变滑动变阻器滑
片位置并读取相应的I 和I 。所得实验数据在下表中给出。
1 2
I /mA 32 55 85 125 144 173
1
I /mA 171 229 299 379 424 470
2
根据实验数据可算得,当I =173 mA时,灯丝电阻R=_______Ω(保留1位小数)。
1
(4)如果用另一个电阻替代定值电阻R ,其他不变,为了能够测量完整的伏安特性曲线,所
0
用电阻的阻值不能小于_______Ω(保留1位小数)。
13.(2019南开中学三月考)某同学研究小灯泡的伏安特性,所使用的器材有:
○
小灯泡L(额定电压3.8V,额定电流0.32A);电压表 V (量程3V,内阻3kΩ);
○
电流表 A (量程0.5A,内阻0.5Ω);固定电阻R (阻值1000Ω);
0
滑动变阻器R(阻值09.0Ω);电源E(电动势5V,内阻不计)
开关S;导线若干。
①实验要求能够实现在03.8V的范围内对小灯泡的电压进行测量,画出实验电路原理图。
②实验测得该小灯泡伏安特性曲线如图(a)所示。
由实验曲线可知,随着电流的增加小灯泡的电阻___(填“增大”“不变”或“减小”)
14.(2019一中五月考)小明用多用电表粗略测量某金属电阻丝的电阻R 约为5.0Ω,为了尽
x
可能精确地测定该金属丝的电阻,且测量时要求通过金属丝的电流在0~0.5A 之间变化.根
据下列提供的实验器材,解答如下问题:
A、量程0.1A,内阻r1=1Ω 的电流表A
1
B、量程0.6A,内阻约为0.5Ω 的电流表A
2
C、滑动变阻器R 全电阻1.0Ω,允许通过最大电流10A
1
D、滑动变阻器R 全电阻100Ω,允许通过最大电流0.1A
2
E、阻值为29Ω 的定值电阻R3
F、阻值为599Ω 的定值电阻R4
G、电动势为6V 的蓄电池E
H、电键S 一个、导线若干
108(a)根据上述器材和实验要求完成此实验,请在虚线框内画出测量该金属丝电阻Rx 的实
验原理图(图中元件用题干中相应的元件符号标注)。
(b)实验中测得电表A 示数为I ,A 表示数为I ,其它所选的物理量题目中已给定,请
1 1 2 2
写出电阻丝的电阻表达式R =
x
15.(2019天津十二区县2次)某同学研究电子元件R (3V,1.6W)的伏安特性曲线,要求多
1
次测量并尽可能减小实验误差,备有下列器材:
A.直流电源(3V,内阻不计)
B.电流表G(满偏电流3mA,内阻r=10Ω)
C.电流表A(00.6 A,内阳未知)
D.滑动变阻器R(020Ω,5A)
E.滑动变阻器R′ (0200Ω,1A)
F.定值电阻R (阻值为990Ω)
0
G.定值电阻R′ (阻值为1990Ω)
0
H.开关与导线若干
①在实验中,为了操作方便且能够准确地进行测量,定值电阻应选用 ,滑动变阻器
应选用 (填写器材前面的字母序号)。
②根据题目提供的实验器材,请在方框内设计出描绘电子元件 R 伏安特性曲线的电路
1
原理图(R 可用 表示)。
1
1093.V-V 法和 A-A 法测电阻和电表内阻
(两安一伏猜安安,两伏一安猜伏伏)
(a) (b)
U −U U
对(a)R= 2 1 对(b)R = 2
U /R U U
1 1 1 − 2
R R
1 2
大电压表内阻有“约”选a图
(c) (d)
I R −I R I R
对(c)R = 2 2 1 1 对(d) R= 1 1
I I −I
1 2 1
上下支路电压相同 支路电流之和等于干路电流
大电流表内阻有“约”选d图
110测 V 表内阻
前提:A 表量程比 V 表的满偏电
流大二倍以上时(这样两个表偏
转 不 能 都 过 半 ) 测 得 值 :
RR U
V = 图中的R为分流电
R+R I
V
阻使偏转都过半
或
前提:V表量程和A表的
满偏电压大致相同
U
测得值:R =
A I
前提:V表量程比A表的满偏电压大二倍
以上时(这样两个表偏转不能都过半)
图中的R为分压电阻使偏转都过半
或
U
测得值:R +R=
A I
1111、(2010福建)(6分)如图所示是一些准备用来测量待测电阻R 阻值的实验器材,器材及
x
其规格列表如下:
器材 规格
待测电阻R
x
阻值在900-1000Ω
电源E 具有一定内阻,电动势约9.0V
电压表V
1
量程2.0V,内阻r
1
=1000Ω
电压表V
2
量程5.0V,内阻r
2
=2500Ω
电流表A 量程0.6A,内阻r
3
=1Ω
滑动变阻器R 最大阻值约100Ω,额定电流0.5A
开关S,导线若干
为了能正常进行测量并尽可能减小测量误差,实验要求测量时电表的读数大于其量程的一半,
而且调节滑动变阻器能使电表读数有较明显的变化。请用实线代替导线,在所给的实验器材
图中选择若干合适的器材,连成满足要求的测量R 阻值的电路。
x
2.(2021届新华校模)某实验小组要测量一圆柱形合金材料的电阻率ρ,其电阻约为20Ω,
实验室有以下器材:
电流表A(量程为50mA,内阻r= 100.0Ω)
1 1
电流表A(量程为120mA,内阻r约为50.0Ω)
2 2
滑动变阻器R(最大值为2000Ω)
1
电源E(电动势为12V,内阻不计)
滑动变阻器R(最大值为400Ω)
2
定值电阻R(R=80Ω)
3 3
开关S,导线若干
①请设计实验电路,要求电流表指针超过其量程的1/3且要尽
量减小电路消耗的总功率。在右侧线框中画出实验电路图,
并标明所用器材的符号,合金材料的电阻用R表示;
x
②根据电路图连接实物,闭合开关,调节滑动变阻器,记录两个电流表A和A的示数分别为
1 2
I和I,则该合金材料的电阻R= (用I、I及题目中的物理量符号表示),其测量值比
1 2 x 1 2
真实值 (填偏大、偏小或相等)
.
1123.(2021届十二校一模)课外实验活动中,小明
要测量量程为3V电压表的内阻值,其步骤如下;
①先用多用电表的欧姆档测量,具体操作如下:
a.把选择开关拨到"×100"的欧姆挡上;
b.把两表笔相接触,旋转欧姆调零旋钮,使指针
指在电阻零刻度处;
c.把红表笔与待测电压表 (选填“正”或“负”)
接线柱相接,黑表笔与另一接线柱相连,发现这时指针偏转角度很小;
d换用 (选填"×10"或"×1k")欧姆挡重新调零后测量,发现这时指针偏转适中,记下电
阻数值;
f.把选择开关旋转到OFF位置。
②小明正确选择挡位后测得电压表内阻为9kΩ,他想进一步精确测量其阻值,现有的器材
及其代号和规格如下:
A. 待测电压表V
1
B. 电压表V (量程15V,内阻约50kΩ)
2
C. 定值电阻R (30kΩ)
0
D. 滑动变阻器R(0~20Ω)
E. 直流电源E(电动势15V,内阻很小)
F. 开关S与导线若干
I.根据所提供的器材,请在虚线框内设计出测量电路图,按图中元件标上相应符号。
II.若电压表V 示数用U 表示,电压表V 示数用U 表示,根据实验中获得的数据,画出U -U
1 1 2 2 2 1
图像如图所示,根据图像可求得的电压表V 阻值为 kΩ(结果保留三位有效数字)
1
4.(2017和平区2模)图甲是测量阻值约十几欧的未知电阻Rx的原 R x
A
理图,R1是电阻箱(0-99.9Ω),R是滑动变阻器,A1和A2是电流 2
表,E是电源(电动势12V,内阻很小) A
1
R
在保证安全和满足要求的情况下,使测量范围尽可能大。实验具体步 1
骤如下
(i)连接好电路,闭合开关S;
R
(ii)调节滑动变阻器R和电阻箱R,使A2示数I= 0.2A,记下此
1 2
时电阻箱的阻值R和A 示数I。 S
1 1
E
(iii)重复步骤(ii),且每次实验中保持A 示数I= 0.2A,再测
2 2
量多组R和I;
1
(iv)将实验洲得的数据在坐标纸上做出如图乙所示的图像。
113根据实验回答以下问题:
① 现有四只供选用的电流表:
A.电流表(0~3mA,内阻为2.0Ω)
B.电流表(0~3mA,内阻未知)
C.电流表(0~0.3A,内阻为5.0Ω
D.电流表(0~0.3A,内阻未知)
A1应选用 ,A2应选
用 。
2.根据以上实验得出Rx= Ω,图
线在纵轴的截距绝对值表示的物理意义
是 。
5.(2016 十二区县第二次联考)一位同学想测量一个有清晰刻度,但没有
A A
示数、量程、内电阻未知的电流表A ,为了测量电流表A 的量程和内 x 0
x x
电阻,可以使用的实验器材如下:
A.电源(电动势约4V,内电阻忽略不计) R
1
B.待测电流表A (量程和内电阻未知)
x P
C.标准电流表A (量程0.6A,内电阻未知)
0
R
D.电阻箱(阻值范围0~999.9Ω) 0
E.滑动变阻器(阻值为0~20Ω)
S
F.滑动变阻器(阻值为0~20kΩ)
G.开关S和导线若干
该同学的实验操作过程为:
①将实验仪器按图所示电路连接,滑动变阻器R 应选________(选填仪器前的字母序号);
0
②将电阻箱R 的阻值调至最大,将滑动变阻器的滑片 P移至某一位置,闭合开关 S;接着
1
调节电阻箱,直至电流表A 满偏,记录此时电阻箱的阻值和标准电流表A 的示数;
x 0
③移动滑片P至滑动变阻器的另一位置,再次调节电阻箱R 直至电流表A 满偏,记录此时
1 x
电阻箱的阻值和标准电流表A 的示数;
0
④重复步骤③3~5次;
1
⑤该同学记录了各组标准电流表A 的示数I 和电阻箱的阻值R 的数据,并作出I − 图线;
0 1 R
1
I/A
0.6
0.3
1
0 1.0 22..00
/Ω−1
R
1
⑥根据图线可以求得电流表A 的量程为 A,内电阻为________Ω。将电流表A 与
x x
一个阻值为________Ω的电阻串联就可以组成量程为3V的电压表。
1146.(2018和平区一模)某同学为测量电阻丝R 的阻
x
值
①他首先选择多用电表的欧姆档进行粗测,用电
表的“×1”档正确操作后得到如图所示的指针情
况,则该电阻的阻值约为__________Ω。
②为了精确测量该电阻R 的阻值,该同学从实验
x
室找来了下列器材:
电压表V(0—15V,内阻r 约为10KΩ)
v
电流表A (0−40 mA,内阻r =11.5 Ω)
1 1
电流表A (0−100 mA,内阻r 约为5 Ω)
2 2
滑动变阻器R(0−5 Ω)
电源E(电动势1.5 V、有内阻)
开关、导线若干
实验中要求调节范围尽可能大,并读数尽可能精确,在方框内画
出符合要求的电路图,并在图中注明各元件的符号。
③得到多组数据后用画图象的方法处理数据,通过描点得到了如
图所示的图线,其中横、纵坐标分别为电路中两电表的示数,则
由图线可得该电阻丝的阻值为 Ω。
7.(2019 天津高考)利用下列器材设计一个电路,尽量准确地
测量一段金属丝的电阻。这段金属丝的电阻R 约为100Ω,画
x
出实验电路图,并标明器材代号。
电源E (电动势10V,内阻约为10Ω)
电流表A (量程0250mA,内阻R1=5Ω)
1
电流表A (量程0300mA,内阻约为5Ω)
2
滑动变阻器R (最大阻值10Ω,额定电流2A)
开关S及导线若干
某同学设计方案正确,测量得到电流表 A 的读数为 I ,电流表 A 的读数为 I ,则这段金属
1 1 2 2
丝电阻的计算式R =______。从设计原理看,其测量值与真实值相比____(填“偏大”、“偏小”
x
或“相等”)。
1158.(2010 天津)要测量电压表 V 的内阻 R ,其量程为 2V,内阻约 2KΩ。实验室提供的器
1 V
材有:
电流表A,量程0.6A,内阻约0.1Ω;
电压表V ,量程5V,内阻为5KΩ;
2
定值电阻R ,阻值30Ω;
1
定值电阻R ,阻值为3KΩ;
2
滑动变阻器R ,最大阻值100Ω,额定电流1.5A;
3
电源E,电动势6V,内阻约0.5Ω;
开关S一个,导线若干。
○
1 E A
有人拟将待测电压表V
1
和电流表A串联接入电压合
适的测量电路中,测出V 的电压和电流,再计算出R 。该方案实际上不可行,其最主要的
1 V
原因是 。
A
○
2 E A
请从上述器材中选择必要的器材,设计一个测量电压表V
1
内阻R
V
的实验电路。要求测量
尽量准确,实验必须在同一电路中,且在不增减元件的条件下完成。试画出符合要求的实验
电路图(图中电源与开关已连接好),并标出所选元件的相应字母代号:
A
○
3 E A
由上问写出V
1
内阻R
V
的表达方式,说明式中各测量量的物理意义。
9.(2019和平区3模)从下列实验器材中选出适当的器材,设计实验电路来测量某电压表的内
阻,要求方法简捷,操作方便,可进行多次测量并达到较高的测量精度。
A.待测电压表V ,量程03V, R 内电阻约20kΩ25kΩ
1 v
B.电压表V,量程05V,内电阻约50kΩ
C.定值电阻R ,阻值20KΩ
1
D.定值电阻R ,阻值100Ω
2
E.滑动变阻器R ,,阻值范围0200Ω,额定电流2.5A
3
F.滑动变阻器R ,阻值范围020Ω,额定电流2A
4
G.电池组,电动势为6V,内电阻为0.5Ω
H.单刀开关若干和导线若干
①请设计一个测量电路,并在方框中画出电路图。
②实验器材选择除A、B、G、H外,定值电阻应选用_ ,滑动变阻器应选用 (用
器材前的字母表示)。
○3 写出测量电压表内阻的表达式_ _ (用已知物理量和测量量表示)
A E A
116三、 替代法测电阻和电表内阻
步骤:把R1阻值调节到最大,
闭合S,把S2接a,调节R1,
使 A 表示数适中,记下读数;
保持 R1 不变,S2 接 b,调节
R2,使A表示数和上次相同,
则此时R2读数为R的阻值。
表象特征:只有一个电表,本质特征:干路电流不变。此方法无系统误差
1、(2012广东卷)某同学测量一个圆柱体的电阻率,需要测量圆柱体的尺寸和电阻。
①分别使用游标卡尺和螺旋测微器测量圆柱体的长度和直径,某次测量的示数如图 15(a)
和图15(b)所示,长度为_____cm,直径为_____mm。
②按图15(c)链接电路后,实验操作如下:
(a)将滑动变阻器 R 的阻值置于最_____处(填“大”或“小”);将 S 拨向接点 1,闭合
1 2
S,调节R,使电流表示数为I;
1 1 0
(b)将电阻箱R的阻值调至最______(填“大”或“小”);将S拨向接点2;保持R不变,
2 2 1
调节R,使电流表示数仍为I,此时R阻值为1280Ω;
2 0 2
③由此可知,圆柱体的电阻为_____Ω。
2、(2011新课标)(5分)为了测量一微安表头A
μA
R
的内阻,某同学设计了如图所示的电路。图中, 0 A(标准) S
0 2 1
A 是标准电流表,R 和 R 分别是滑动变阻器和
0 0 N E R N μA A (待测)
电阻箱,S和S 分别是单刀双掷开关和单刀开关,
1
S
1
E是电池。完成下列实验步骤中的填空:
⑴将 S 拨向接点 1,接通 S ,调节_____,使待测表头指针偏转到适当位置,记下此时
1
_________的读数I;
⑵然后将S拨向接点2,调节_____,使____________,记下此时R 的读数;
N
⑶多次重复上述过程,计算R 读数的________,此即为待测微安表头内阻的测量
N
1173.(2016全国1)现要组装一个由热敏电阻控制的报
警系统,当要求热敏电阻的温度达到或超过60°C时,
系统报警。提供的器材有:热敏电阻,报警器(内
阻很小,流过的电流超过I时就会报警),电阻箱(最
c
大阻值为999.9Ω),直流电源(输出电压为U,内阻
不计),滑动变阻器R (最大阻值为1000Ω),滑动变阻器R (最大阻值为2000Ω),单刀双掷
1 2
开关一个,导线若干。
在室温下对系统进行调节,已知U约为18V,I 约为10mA;流过报警器的电流超过20mA
c
时,报警器可能损坏;该热敏电阻的阻值随温度的升高而减小,在60°C时阻值为650.0Ω.
(1)在答题卡上完成待调节的报警系统原理电路图的连线。
(2)在电路中应选用滑动变阻器________(填“R ”或“R ”)。
1 2
(3)按照下列步骤调节此报警系统:
①电路接通前,需将电阻箱调到一定的阻值,根据实验要求,这一阻值为______Ω;滑
动变阻器的滑片应置于______(填“a”或“b”)端附近,不能置于另一端的原因是______。
②将开关向______(填“c”或“d”)端闭合,缓慢移动滑动变阻器的滑片,直至______。
(4)保持滑动变阻器滑片的位置不变,将开关向另一端闭合,报警系统即可正常使用。
118四、 电桥法测电阻
UR UR
φa= 2 ,φb= 4 ,当φa= φb时G表
R +R R +R
1 2 3 4
示数为0.
UR UR R +R R +R
则 2 = 4 ⇒ 1 2 = 3 4
R +R R +R R R
1 2 3 4 2 4
R R
此时 1 = 3
R R
2 4
1、(2013 安徽)用图示的电路可以测量电阻的阻值。图中
R 0 R x
R 是待测电阻,R 是定值,○ G 是灵敏度很高的电流表,MN G
x 0 E A
是一段均匀的电阻丝。闭合开关,改变滑动头 P 的位置,
当通过电流表○ G 的电流为零时,测得MP=l ,PN =l , M N
A E A 1 2
P
则R 的阻值为( )
x
l l
A. 1 R B. 1 R
l 0 l +l 0
2 1 2
l l
C. 2 R D. 2 R
l 0 l +l 0
1 1 2
2.(2017全国2)(9分)某同学利用如图(a)所示的电路测量一微安表(量程为100μA,内
阻大约为2500 Ω)的内阻。可使用的器材有:两个滑动变阻器R 、R(其中一个阻值为20 Ω,
1 2
另一个阻值为2000 Ω);电阻箱R(最大阻值为99 999.9Ω);电源E(电动势约为1.5V);单
z
刀开关S 和S 。C、D分别为两个滑动变阻器的滑片。
1 2
119(1)按原理图(a)将图(b)中的实物连线。
(2)完成下列填空:
①R 的阻值为 Ω(填“20”或“2000”)。
1
②为了保护微安表,开始时将R 的滑片C滑到接近图(a)中的滑动变阻器的 端
1
(填“左”或“右”)对应的位置;将R 的滑片D置于中间位置附近。
2
③将电阻箱 R 的阻值置于 2500.0Ω,接通 S 。将 R 的滑片置于适当位置,再反复调节
z 1 1
R 的滑片D的位置。最终使得接通S 前后,微安表的示数保持不变,这说明S 接通前B与
2 2 2
D所在位置的电势 (填“相等”或“不相等”)。
④将电阻箱R 和微安表位置对调,其他条件保持不变,发现将R 的阻值置于2601.0 Ω
z z
时,在接通 S 前后,微安表的示数也保持不变。待测微安表的内阻为 Ω(结
2
果保留到个位)。
(3)写出一条提高测量微安表内阻精度的建议: 。
120五“半偏法”测电表内阻
“半偏法”测电流表 “半偏法”测电压表
实验 步骤:1、R1调 节到最大2、闭合S1, 实验步骤:1、把 R1 划片滑到最左端
断开 S2,调节R1,使A表满偏3、把R2 2、闭合 S,R2 调零,调节 R1,使 V
调节 到最大,4、闭合S2,保持R1不变, 表满偏3、保持R1不变,调节R2,使
调节 R2,使 A 表半偏,记下 R2 读数, V表半偏,记下R2读数,即为V表内
即为A表内阻。 阻。
误差分析:测得值偏小。 误差分析:测得值偏大
R2并入前,干路电流为A表满偏电流I , R2串入前,AB间电压为V表满偏电压
g
R2并入后,总电阻变小,干路电流I=I + U ,R2串入后,AB间电阻变大,电压
g g
1 1 1
∆I,而A表电流为 I ,R2上电流为 也变大U =U +∆U ,而V表电压为
g AB g
2 2 2
I +∆I,所以根据并联电路电流和电阻成 1
g U ,R2 上电压为 U +∆U ,根据串
反比,R2R
v
越精确越好。 仪表选用标准:R2:比 V 表内阻稍大
R1:越大越好,同时RA越小测量越精确 且越精确越好。
E:约小于A表量程乘以R1的满值 R1:越小越好,同时RV越大测量越精
确
E:约大于或等于V表量程
1、(2020 南开区一模)在“把电流表
A
改装为电压表的实验”中,
需要利用如图所示的电路测定电流表的内阻,步骤如下:
①闭合开关S ,调节R ,使电流表指针偏转到满刻度;
1 1
②再闭合开关S ,调节R ,使电流表指针偏转到满刻度的一半;
2 2
③读出R 的阻值,即认为r =R
2 g 2
已知电流表满偏电流为500μA,其内阻约在 100Ω左右,实验室配有的可变电阻有:
A.电阻箱(0~10Ω) B.电阻箱(0~9999Ω)
C.滑动变阻器(0~200Ω) D.滑动变阻器(0~20kΩ)
(a)电路图中R 应选 ,R 应选 .
1 2
(b)若上述实验中,读得R 的阻值为100Ω,则电流表内阻的测量值和真实值相比 (填
2
“偏大” 或“偏小”).
(c)若将此电流表改装成量程为2V的电压表,应联一个阻值为 Ω的电阻.
1212、(2020红桥二模)在实验室中,往往利用半偏法测量电流表或电压表的内阻。测量电路
图如下,E为电源,其电动势为E,R 为总阻值较大的滑动变阻器.R 为电阻箱。A为被测
1 2
电流表.用此电路,经以下步骤可近似测得电流表的内阻R :①闭合K ,断开K ,调节R ,
A 1 2 1
I
使电流表读数等于其量程I ;②保持R 不变,闭合K ,调节R ,使电流表读数等于 0 ③
0 1 2 2 2
读出R 的值,则R = R 。若电源的内阻忽略不计,则该实验的系统误差总是使电表内阻
2 A 2
的测量值比其真实值 (填偏大还是偏小)
3、(2010 北京)(1)甲同学要把一个量程为 200µA的直流电流计 ,改装成量度范围
是0~4V的直流电压表。
① 她按图1所示电路、用半偏法测定电流计 的内电阻r g ,其中电阻R 0 约为1kΩ。为
使 r
g
的测量值尽量准确,在以下器材中,电源E应选用______________,电阻器R
1
应
选用______________,电阻器R 应选用______________(选填器材前的字母)
2
A.电源(电动势1.5V)B.电源(电动势6V)
C.电阻箱(0~999.9Ω) D.滑动变阻器(0~500Ω)
E.电位器(一种可变电阻,与滑动变阻器相当)(0~5.1kΩ)
F.电位器(0~51kΩ)
②该同学在开关断开情况下,检查电路连接无误后,将R 的阻值调至最大。后续的实验操
2
作步骤依次是______________,______________,______________,______________,最后
记录R 的阻值并整理好器材。(请按合理的实验顺序,选填下列步骤前的字母)
1
A.闭合S
1
B.闭合S
2
C.调节R 的阻值,使电流计指针偏转到满刻度
2
D.调节R 的阻值,使电流计指针偏转到满刻度的一半
2
E.调节R 的阻值,使电流计指针偏转到满刻度的一半
1
F.调节R 的阻值,使电流计指针偏转到满刻度
1
122③如果所得的R 的阻值为 300.0Ω ,则图1中被测电流计 的内阻r的测量值为
1
______________Ω,该测量值__________实际值(选填“略大于”、“略小于”或“等于”)。
④给电流计 __________联(选填“串”或“并”)一个阻值为__________kΩ的电阻,
就可以将该电流计 改装为量程4V的电压表。
(2)乙同学要将另一个电流计 改装成直流电压表,但他不仅借到一块标准电压表 、
一个电池组E、一个滑动变阻器R′和几个待用的阻值准确的定值电阻。
①该同学从上述具体条件出发,先将待改装的表 直接与电压表
校准。请你画完图2方框中的校准电路图。
② 实验中,当定值电阻R选用17.0kΩ时,调整滑动变阻器R′的
阻值,电压表 的示数是4.0V时,表 的指针恰好指到满量程
的五分之二;当R选用 7.0kΩ时,调整R′的阻值,电压表 的
示数是2.0V时,表 的指针又指到满量程的五分之二。由此可以判定,表 的内阻r
g
是_______kΩ,满偏电流I 是_______mA。若要将表 改装为量程是 15V的电压表,
g
应配备一个_______kΩ的电阻。
4、(2004天津理综)(15分)现有一块59C2型的小量程电流表G(表头),满偏电流为50µA,
内阻约为800~850Ω,把它改装成1mA、10mA的两量程电流表。
可供选择的器材有:
滑动变阻器R ,最大阻值20Ω;滑动变阻器R ,最大阻值100kΩ
1 2
电阻箱R′,最大阻值9999Ω ;定值电阻R ,阻值1kΩ;
0
电池E ,电动势1.5V;电池E ,电动势3.0V ;电池E ,电动势4.5V ;(所有电池内
1 2 3
阻均不计)
标准电流表A,满偏电流1.5mA;单刀单掷开关S 和S ,单刀双掷开关S ,电阻丝
1 2 3
及导线若干。
(1)采用如图1所示电路测量表头的内阻,为提高测量精确度,选用的滑动变阻器为
;选用的电池为 。
. .
G .
R
R'
S2
S1 E
图1
123(2)将G改装成两量程电流表。现有两种备选电路,示于图2和图3。图 为合
理电路,另一电路不合理的理由是 。
G G
.
. . . 10mA Rc
Ra Rb
.
S3
.
S3 Rd
10mA 1mA
1mA
图2 图3
(3)将改装后的电流表与标准电流表逐格进行核对(仅核对1mA量程),画出所用电路图,
图中待核对的电流表符号用 A′ 来表示。
5、(2012 天津)某同学在进行扩大电流表量程的实验时,需要知道电流表的满偏电流和内
阻。他设计了一个用标准电流表G 来校对待测电流表G 的满偏电流和测定G 内阻的电路,
1 2 2
如图所示。已知 G 的量程略大于 G 的量程,图中 R 为滑动变阻器。R 为电阻箱。该同学
1 2 1 2
顺利完成了这个实验。
①实验过程包含以下步骤,其合理的顺序依次为__________________(填步骤的字母代号)
A. 合上开关S
2
B. 分别将R 和R 的阻值调至最大
1 2
C. 记下R 的最终读数
2
D. 反复调节 R 和 R 的阻值,使 G 的示数仍为 I ,使 G 的指针偏转到满刻度的一半,
1 2 1 1 2
此时R 的最终读数为r
2
E. 合上开关S
1
F. 调节R 使G 的指针偏转到满刻度,此时G 的示数为I ,记下此时G 的示数
1 2 1 1 1
②仅从实验设计原理上看,用上述方法得到的G 内阻的测量值与真实值相比_______(填“偏
2
大”、“偏小”或“相等”)
③若要将 G 的量程扩大为 I,并结合前述实验过程中测量得结果,写出须在 G 上并联的分
2 2
流电阻R 的表达式,R =_______。
S S
6、(2015新课标I)(9分)电压表满偏时通过该表的电流是半偏是通过该表的电流的两倍。
某同学利用这一事实测量电压表的内阻(半偏法)实验室提供材料器材如下:
待测电压表(量程3V,内阻约为3000欧),电阻箱R (最大阻值为99999.9欧),滑动变阻器
0
R1(最大阻值100欧,额定电压2A),电源E(电动势6V,内阻不计),开关两个,导线若
干。
(1)虚线框内为同学设计的测量电压表内阻的电路图的一部分,将电路图补充完整
(2)根据设计的电路写出步骤
124(3)将这种方法测出的电压表内阻记为R1v与内阻的真实值Rv先比R1v________. Rv
(添“>”“=”或“<”)主要理由是
7、(2014 安徽)某同学为了测量一个量程为3V的电压表的内阻,
进行了如下实验。(1)他先用多用表进行了正确的测量,测量时指
针指示如图1所示,得出电压表的内阻为3.00×103Ω,此时电压
表的指针也偏转了。已知多用表欧姆档表盘中央刻度值为“15”,
表内电池电动势为 1.5V,则电压表的示数应为____________V(结
果保留两位有效数字)。
(2)为了更准确地测量该电压表的内阻R,该同学设计了图2所示的电路图,
V
实验步骤如下:
A.断开开关S,按图2连接好电路
B.把滑动变阻器R的滑片P滑到b端;
C.将电阻箱R 的阻值调到零;
0
D.闭合开关S;
E.移动滑动变阻器R的滑片P的位置,使电压表的指针指到 3
V的位置;
F.保持滑动变阻器R的滑片P位置不变,调节电阻箱R 的阻值
0
使电压表指针指到1.5V位置,读出此进电阻箱的阻值,此值即为
电压表内阻R 的测量值;
V
G.断开开关S.
实验中可供选择的实验器材有:
a.待测电压表
b.滑动变阻器:最大阻值2000Ω
c. 滑动变阻器:最大阻值10Ω
d.电阻箱:最大阻值9999.9Ω,阻值最小改变量为0.1Ω
e.电阻箱:最大阻值999.9Ω,阻值最小改变量为0.1Ω
f.电池组:电动势约为6V,内阻可忽略
g.开关,导线若干
125按照这位同学设计的实验方法,回答下列问题:
①要使测量更精确,除了选用电池组、导线、开关和待测电压表外,还应从提供的滑动变阻
器中选用____(填“b”或“c”)电阻箱中选用________(填“d”或“e”)
②电压表内阻 R 的测量值R 和真实值 R 相比,R _________R (填“>”或“<”);若 R
V 测 真 测 真 V
|R - R |
越大,则 测 真 越__________(填“大”或“小”)。
R
真
8、(2016全国2)(9分)某同学利用图所示电路测量量程为2.5V的电压
表○ V 的内阻(内阻为数千欧姆),可供选择的器材有:电阻箱R(最大
E A
阻值99999.9Ω),滑动变阻器R (最大阻值50Ω),滑动变阻器R (最
1 2
大阻值5kΩ),直流电源E(电动势3V),开关1个,导线若干。
实验步骤如下:
①按电路原理图连接线路;
②将电阻箱阻值调节为0,将滑动变阻器的滑片移到与图中最左端所对应的位置,闭合开关S;
③调节滑动变阻器,使电压表满偏
④保持滑动变阻器滑片的位置不变,调节电阻箱阻值,使电
压表的示数为2.00V,记下电阻箱的阻值。
回答下列问题:
⑴实验中应选择滑动变阻器 (填“R ”或“R ”).
1 2
⑵根据所示电路将右图中实物图连线。
⑶实验步骤④中记录的电阻箱阻值为630.0Ω,若认为调节
电阻箱时滑动变阻器上的分压不变,计算可得电压表的内
阻为 Ω(结果保留到个位)。
⑷如果此电压表是由一个表头和电阻串联构成的,可推断该表头的满刻度
电流为 (填正确答案标号)。
A.100µA B.250µA C.500µA D.1mA
1269.(2018河西区二模)某同学设计了左下如图所示的电路来测量一个量程为3V的电压表的内
电阻(几千欧),实验室提供直流电源的电动势为6V,内阻忽略不计;
(1)请完成右图的实物连接
(2)在该实验中,认为当变阻器的滑片 P 不动时,无论电阻箱的阻值如何增减,P 两点
间的电压保持不变;请从下列滑动变阻器中选择最恰当的是 ;
A.变阻器A(0-2000Ω,0.1A)
B.变阻器B(0-20Ω,1A)
C.变阻器C(0-5Ω,1A)
(3)连接好线路后,先将变阻器滑片P调到最 端,并将电阻箱阻值调到 (填“0”
或“最大”),然后闭合电键S,调节P,使电压表满偏,此后滑片P保持不动;调节变阻箱
的阻值,.记录电压表的读数;最后将电压表读数的倒数U-1与电阻箱读数R。描点,并画出
图所示的图线,由图象得,待测电压表的内阻值为_____Ω(保留两位有效数字)
U−1/(V−1)
0.33
-3.0 0
R/(kΩ)
127六、V-A 法测电源电动势和内阻
考点1.选内外接和误差分析
甲图 乙图
测得值是当作电表理想来看,如此V表测路端电压,A表测干路电流,上面两图无区别
U +Ir = E
测 测 解出E 纵轴截距,r 斜率大小
U =−r I +E 测 测
测 测
当甲图,V表测的不是路端电压,误差原因:A表分压作用
U +I(r+R )= E,
A
解出E纵轴截距,r=r+R 为斜率大小
A
测得值和真实值的比较图:说明甲图中电动势测得值无误差,内阻
测得值为电源内阻和电流表内阻之和,测得值偏大。
当乙图时,A表测的不是干路电流,误差原因,V表的分流作用
U r
U +(I + )r = E →U(1+ )+Ir = E
R R
V V 解出:
R R
U +Ir V = E V →U +Ir =E
R +r R +r 测 测
V V
R R
E = E V ,r =r V
测 R +r 测 R +r
V V
乙图测得值电动势和内阻都偏小 ,但是由于电压表内阻远大于电源内阻,误差很小,误差
可忽略。
结论:当电流表理想或内阻已知用甲图,如此就没有误差,或者水果电池内阻特别大,远
大于电流表内阻,于是用甲图的误差可以容忍。
当电压表理想用乙图,如此就没有误差。
无特殊说明用乙图
128考点2:仪表选用和保护电阻
V表一般和电源电压大致相同,
滑动变阻器没有U-I图时选比电源内阻大一个量级左右,有U-I图用描的最高点的U除
以I来选.
A表一般选约大于电源电压除以滑动变阻器,
保护电阻R0阻值和电源内阻在一个量级)。
左图:保护电阻未知时必用左图,测得值和不加R 时相同
0
右图:优点可以同时保护A V两个表,
当电压表量程小于电源电动势时使用,
或者电池很新,r太小时使用,否则电压表变化太不明显。
R0必须已知,因为内阻测得值要减去R0才为真实值。
考点3.用A表和定值电阻代替V 表
A1表示数乘以A1内阻和R1之和
为电压测得值(等效电压表读数)
考点4.同时测外电阻的阻值和电源电动势内阻
甲用V1和A测得
P
V 乙用V2和A测得
2
甲斜率电源内阻,乙斜率是R0
R R 甲图线上的每个点都表示电源的路端电
0
A 压和电流。乙图线上每个点表示电阻上的电
压和电流。交点表示,电阻上的电压等于电
V
1 源路端电压,也就是电阻直接接到电源两端。
交点横纵坐标乘积的含义为:把 R0 直接
接到电源两端时的功率
1291、(2009 安徽)(6 分)用右图所示的电路,测定一节干电池的
E S
电动势和内阻。电池的内阻较小,为了防止在调节滑动变阻器时
造成短路,电路中用一个定值电阻R 起保护作用。除电池、开关
0
和导线外,可供使用的实验器材还有:
V
(a) 电流表(量程0.6A、3A);
R
0
(b) 电压表(量程3V、15V)
A
(c) 定值电阻(阻值1Ω、额定功率5W) R
(d) 定值电阻(阻值10Ω,额定功率10W)
(e) 滑动变阻器(阻值范围0--10Ω、额定电流2A)
(f) 滑动变阻器(阻值范围0-100Ω、额定电流1A)
那么
(1)要正确完成实验,电压表的量程应选择 V,电流表的量程应选择 A; R
0
应选择 Ω的定值电阻,R应选择阻值范围是 Ω的滑动变阻器。
(2)引起该实验系统误差的主要原因是 。
2.(2014 海南卷)用伏安法测量一电池的内阻。已知该待测电池的电动势E约为9V,内阻
约数十欧,允许输出的最大电流为50mA,可选用的实验器材有:
电压表V (量程5V);电压表V (量程10V);
1 2
电流表A (量程50mA);电压表A (量程100mA);
1 2
滑动变阻器R(最大电阻300Ω);
定值电阻 R (阻值为 200Ω,额定功率为 1/8W);定值电阻 R (阻值为 220Ω,额定功率为
1 2
1W);
开关S;导线若干。
测量数据如坐标纸上U-I图线所示。
(1)在答题卡相应的虚线方框内画出合理的电路原理图,并标明所选器材的符号。
(2)在设计的电路中,选择定值电阻的根据是 .
(3)由U-I图线求得待测电池的内阻为 Ω。
(4)在你设计的电路中,产生系统误差的主要原因是 .
1303 .(2017 年上海)“用DIS测定电源的电动势和内阻”的实验电路如图(a)所示,其中定值
电阻阻值R =1 Ω。
1
U/V
S
R 1.50
1
1.40
AP B E,r
1.30
R
1.20
0 0.25 0.50 0.75 1.00 I/A
(a)
(b)
(1)图(a)中 A 为__ __传感器,定值电阻 R 在实验中起___ __
1
的作用;
(2)实验测得的路端电压 U 相应电流 I 的拟合曲线如图(b)所示,由此得到电源电动势
E=__ _____V,内阻r=______ Ω;
(3)实验测得的数据如表所示,则实验中选用的的滑动变阻器最合理的阻值范围为( )
A.0~5Ω B.0~20Ω C.0~50Ω D.0~200Ω
4、(2015四川)(11分)用实验测一电池的内阻r和一待测电阻的阻值R 。已知电池的电动
x
势约6V,电池内阻和待测电阻阻值都为数十欧。可选用的实验器材有:
电流表A (量程0~30mA); 电流表A (量程0~100mA);
1 2
电压表V(量程0~6V); 滑动变阻器R (阻值0~5Ω);
1
滑动变阻器R (阻值0~300Ω); 开关S一个,导线若干条。
2
某同学的实验过程如下:
Ⅰ.设计如图3所示的电路图,正确连接电路。
Ⅱ.将R的阻值调到最大,闭合开关,逐次调小R的阻值,测出多组U和I的值,并记录。
以U为纵轴,I为横轴,得到如图4所示的图线。
Ⅲ.断开开关,将R 改接在B、C之间,A与B直接相连,其他部分保持不变。重复Ⅱ的步
x
骤,得到另一条U-I图线,图线与横轴I的交点坐标为(I ,0),与纵轴U的交点坐标为(0,
0
U )。
0
131回答下列问题:
①电流表应选用 ,滑动变阻器应选用 ;
②由图4的图线,得电源内阻r= Ω;
③用I 、U 和r表示待测电阻的关系式R = ,代入数值可得R ;
[] 0 0 x x
④若电表为理想电表,R 接在B、C之间与接在A、B之间,滑动变阻器滑片都从最大阻值
x
位置调到某同一位置,两种情况相比,电流表示数变化范围 ,电压表示数变化
范围 。(选填“相同”或“不同”)
5、(2021届耀华校二模)在测定一组干电池的电动势和内电阻的实验中,备有下列器材:
A.待测的干电池
B.电流表A (内阻r =100Ω)
1 1
C.电流表A (内阻可忽略不计)
2
D.定值电阻R (阻值900Ω)
0
E.滑动变阻器R(阻值0~20Ω)
F.开关和导线若干
甲 乙
某同学发现上述器材中虽然没有电压表,但给出了两个电流表,于是他设计了如图甲所示的
电路完成实验。
① 在实验操作过程中,该同学将滑动变阻器的滑片P向左滑动,则电流表A 的示数将
1
(选填“变大”或“变小”)。
② 该同学利用测出的实验数据绘出的I -I 图线(I 为电流表A 的示数,I 为电流表A 的示数,
1 2 1 1 2 2
且I 的数值远远大于I 的数值),如图乙所示,则由图线可得被测电池的电动势E= V,
2 1
内阻r= Ω。(计算结果均保留两位有效数字)
③ 若将图线的纵坐标改为 ,则图线与纵坐标的交点的物理含义即为电动势的大小。
6、(2009海南)图1是利用两个电流表A1和A2测量干电池电动势E和内阻r的电路原理
图。图中S为开关,R为滑动变阻器,固定电阻R 和A1内阻之和为10000Ω(比r和滑动
1
变阻器的总电阻都大得多),A2为理想电流表。
E,r
+
S
E r S R
A A
2
R
1
A
1
a R b R 1
A A 1
c
A
2
图1
图2
① 按电路原理图在图2虚线框内各实物图之间画出连线。
I (mA) 0.120 0.125 0.130 0.135 0.140 0.145
1
I (mA) 480 400 320 232 140 68
2
②在闭合开关S前,将滑动变阻器的滑动端c移动至 (填“a端”、“中央”
或“b 端”)。
132③闭合开关S,移动滑动变阻器的滑动端c至某一位置,读出电
流表 和 的示数I 和I 。多次改变滑动端c的位置,得到的
1 2
数据为在图3所示的坐标纸上以I 为纵坐标、I 为横坐标画出
1 2
所对应的I −I 曲线。
1 2
④利用所得曲线求的电源的电动势E= V,内阻r=
Ω.(保留两位小数)
⑤该电路中电源输出的短路电流I = A。
m
7.(2017天津) 某探究性学习小组利用如图1所示的电路测量电池的电动势和内阻.其中电
流表A 的内阻r =1.0kΩ,电阻R =9.0kΩ,为了方便读数和作图,给电池串联一个R =3.0Ω的
1 1 1 0
电阻.
①按图示电路进行连接后,发现aa′、bb′和cc′三条导线中,混进了一条内部断开的导线.为
了确定哪一条导线内部是断开的,将电建S闭合,用多用电表的电压挡先测量a、b′间电压,
读数不为零,再测量a、a′间电压,若读数不为零,则一定是 导线断开;若读数为零,
则一定是 导线断开.
②排除故障后,该小组顺利完成实验.通过多次改变滑动变阻器触头位置,得到电流表 A
1
和 A 的多组 I 、I 数据,作出图象如图 2.由 I ﹣I 图象得到的电池的电动势 E= V,
2 1 2 1 2
内阻r= Ω.
1338.(2021届南开中学四次月考)为了测量电池的电动势和内阻,实验室中准备了下列器材;
A.待测干电池(电动势约为1.5v,内阻约为1.0Ω)
B.电流表A(满偏电流1.5 mA,内阻为10Ω
1
C.电流表A(量程0-0.60 A,内阻约为0.10Ω)
2
D.电压表V(量程0-15V,内阻约为10kΩ)
E.滑动变阻器R(0-20Ω,2A)
1
F.滑动变阻器R(0-100Ω,1A)
2
G.电阻箱R;最大阻值为999.9Ω,允许通过的最大电流是0.6A
3
H.开关一个,导线若干
①小明按图(a)设计好了测量的电路图,在图(a)中,甲是 ,乙是 .(填器材前
面的序号)
②为了能较为准确地进行测量和操作方便,图(a)所示的测量电路中,滑动变阻器应选 .
(填器材前面的序号)。
③图(b)为小明根据图(a)的测量电路测得的实验数据作出的I-I图线(I为电表乙的示
1 2 1
数,I为电表甲的示数),由该图线可得:被测干电池的电动势E= V,内阻r= Ω(均
2
保留两位小数)
(a) (b)
9、(2013 天津)要测绘一个标有“3V,0.6W”小灯泡的伏安特性曲线,灯泡两端的电压需
要由,零逐渐增加到3V,并便于操作。已选用的器材有:
电池组(电动势为4.5V,内阻约1Ω): 电流表(量程为0~250mA.内阻约5Ω);
电压表(量程为0~3V.内限约3kΩ): 电键一个、导线若干。
① 实验中所用的滑动变阻器应选下列中的 (填字母代号)。
A. 滑动变阻器(最大阻值20Ω, 额定电流1A)
B. 滑动变阻器(最大阻值1750Ω,额定电流0.3A)
② 实验的电路图应选用下列的图(填字母代号)。
实验得到小灯泡的伏安特性曲线如图所示。如果将这个
小灯泡接到电动势为 1.5V,内阻为 5Ω的电源两端,小
灯泡消耗的功率是_ W。
13410.(2019南开区2模)在“描绘小灯泡的伏安特性曲线”的实验中,需测量一个“25V,0.3A”
的小灯泡两端的电压和通过它的电流。现有如下器材:
直流电源(电动势3.0V,内阻不计)
电流表A (量程3A,内阻约0.1Ω)
1
电流表A (量程600mA,内阻约5Ω)
2
电压表V (量程3V,内阻约3kΩ)
1
电压表V (量程15V,内阻约15kΩ)
2
滑动变阻器R (阻值010Ω,额定电流1A)
1
滑动变阻器R (阻值01kΩ,额定电流300mA)
2
①在该实验中,电流表应选择 ,电压表应选
择 ,滑动变阻器应
选择 。
②为了减小实验误差,应选择以下哪个实验电路进行实验 。
○3 下表是某同学在实验中测出的数据,该同学根据表格中的数据在方格纸上已画出除了第
E A
6组数据的对应点,请你在I-U图象上画出第6组数据的对应点,并作出该小灯泡的伏安
特性曲线。
④实验中,如果把这个小灯泡和一个阻值为9Ω的定值电阻串联在电动势为3V、内阻为
1Ω的直流电源上。则小灯泡消耗的实际功率约为 W。
11、(2009 重庆)硅光电池是一种可将光能转换为电能的器件。某同学用题 22 图 2 所示电
路探究硅光电池的路端电压 U 与总电流 I 的关系。图中 R 为已知定值电阻,电压表视为理
0
想电压表。
①请根据题22图2,用笔画线代替导线将题22图3中的实验器材连接成实验电路。
② 电压表V 的读数为U ,则I= mA;
2 0
135③ 实验一:用一定强度的光照射硅光电池,调节滑动变阻器,通过测量得到该电池的U-I
曲线a。见题22图4,由此可知电池内阻
(填“是”或“不是”)常数,短路电流为 mA ,电动势为 V。
④ 实验二:减小实验一中光的强度,重复实验,测得U-I曲线b,见题22图4.当滑动变
阻器的电阻为某值时,若实验一中的路端电压为 1.5V。则实验二中外电路消耗的电功率为
mW(计算结果保留两位有效数字)。
12.(2019天津一中四月考)某个同学设计了一个申路,既能测量电池组的电动势E和内阻r,
又能同吋测量未知电阻Rx的阻値。器材如下:
A.电池组(四节干电池) B.待测电阻Rx(约10Ω)
C.电圧表V (量程3V、内阻很大) D.电圧表V (量程6V、内阻很大)
1 2
E.电阻箱R(最大阻値99.9Ω) F.开关一只,导线若干
实验歩驟如下:
①将实验器材连接成如图(a)所示的电路,闭合开关,调节电阻箱的阻值,
先让电压表V 接近满偏,逐渐增加电阻箱的阻值,并分别读出两只电压表的读数。
1
U
②根据记录的电压表V 的读数U 和电压表V 的读数U ,以 2 为纵坐标,以对应的电阻
1 1 2 2
U
1
箱的阻值R为横坐标,得到的实验结果如图(b)所示。由图可求得待测电阻Rx= Ω(保
留两位有效数字)。
③图(c)分別是以电压表的读数为纵坐标,以两电压表读数之差与电阻箱阻值的比值
U −U
2 1 为横坐标得到的结果。两图线的交点的横坐标为 A,纵坐标为 V。(结
R
果均保留两位有效数字)
13613.如图所示为某同学所测的几组数据画出某灯泡的的I-U图象,如果把两个这样的灯泡和
R =18Ω的定值电阻串联起来接在电源E(电动势6V,内阻r=2Ω)上,如图,则每只灯泡
0
消耗的实际功率为 W。
14.电源的两个重要参数是电动势E和内阻r,对一个闭合电路有两种特殊情况:当外电路断
开时,电源两端的电压等于电源电动势;当外电路短路时,短路电流等于电动势和内阻的比
值。现有一个电动势为E、内阻为r的电源和一阻值为R 的定值电阻,将它们申联或并联组
0
成的系统视为一个新的等效电源,这两种连接方式构成的等效电源分别如图甲和乙中虚线框
所示,r 和r 分别为甲、乙等效电源的内阻,当这两个新的等效电源分别和一阻值为R的电
1 2
阻连接时,新的等效电源输出功率相等,若改为将R'(R' < R)分别接在这两个新的等效电
源两端,新的等效电源的输出功率分别为P、P ,则( )
1 2
A.r r ,,P > P
1 2 1 2 1 2 1 2
C.r P D. r >r ,P < P
1 2 1 2 1 2 1 2
137七、I-R 法测测电源电动势和内阻
1
I(R+r)= E →R= E −r或
I
线性图像的斜率电动势,纵轴截距为内阻测得值
IR=-Ir+E
R
1 斜率E
I 1
m
I
r+R
A
画R-1/I图,斜率为电动势E,纵轴截距为r+R 。
A
V
R R
0
U 1 1 1
当电压表理想时, (R +R+r )=E → = R+ (R +r )
R 0 测 测 U E R E R 0 测
0 测 0 测 0
例题:
1.(2006 理综天津)某研究性学习小组利
用右图所示电路测量电池组的电动势 E 和
内阻 r。根据实验数据绘出如下图所示的
R~1/I图线,其中R为电阻箱读数,I为电
流表读数,由此可以得到:
E= V,r= Ω。
1382、(2009 北京)某同学通过查找资料自己动手制作了一个电池。该同学想测量一下这个电
池的电动势E 和内电阻r,但是从实验室只借到一个开关、一个电阻箱(最大阻值为9.999
Ω,可当标准电阻用) 一只电流表(量程I =0.6A,内阻r =0.1Ω)和若干导线。
R g
①请根据测定电动势E内电阻r的要求,设计图4中器件的连接方式,画线把它们连接起来。
②接通开关,逐次改变电阻箱的阻值R, 读出与R对应的电流表的示数 I,并作记录当电阻
箱的阻值R=2.6Ω时,其对应的电流表的示数如图5 所示。处理实验数据时首先计算出每
1 1 1
个电流值I 的倒数 ;再制作R- 坐标图,如图6所示,图中已标注出了(R, )的几个与
I I I
测量对应的坐标点,请你将与图5实验数据对应的坐标点也标注在图6中上。
③ 在图6上把描绘出的坐标点连成图线。
⑤ 根据图6描绘出的图线可得出这个电池的电动势E= V, 内电阻r = Ω
1393 (2018江苏)一同学测量某干电池的电动势和内阻.
(1)题10-1图所示是该同学正准备接入最后一根导线(图中虚线所示)时的实验电路.请
指出图中在器材操作上存在的两个不妥之处.
[来源:学科网]
1
(2)实验测得的电阻箱阻值R和电流表示数I,以及计算的 数据见下表:
I
1
根据表中数据,在答题卡的方格纸上作出R− 关系图象.由图象可计算出该干电池的电动
I
势为V;内阻为Ω.
R/Ω 8.0 7.0 6.0 5.0 4.0
I/A 0.15 0.17 0.19 0.22 0.26
1 6.7 6.0 5.3 4.5 3.8
/A–1
I
(3)为了得到更准确的测量结果,在测出上述数据后,该同学将一只量程为 100 mV 的电
压表并联在电流表的两端.调节电阻箱,当电流表的示数为 0.33 A 时,电压表的指针位置
如题10-2 图所示,则该干电池的电动势应为 V;内阻应为 Ω.
1
4.(2020和平区1模)某同学设计了如图 R R 1 /A-1
I
所示的电路测电源电动势 E 及电阻 R 1 S 2 b 3.0
a
和 R 2 的阻值,实验器材有: 待测电 R 2 2.0
源E(不计内阻),待测电阻R ,定值电 S 1 A R/Ω
1
0 2.0
阻R ,电流表A(量程为0.6A,内阻不
2
计),电阻箱R(0-99.99Ω),单刀单掷开关S ,单刀双掷开关S ,导线若干
1 2
①先测电阻R 的阻值(R 只有几欧姆),请将操作补充完整:闭合S ,将S 切换到a,调节
1 1 1 2
电阻箱,读出其示数r 和对应的电流表示数I,将S 切换到b,调节电阻箱,使电流表的示
1 2
数仍为I,读出此时电阻箱的示数r ,则电阻R 的表达式为R =
2 1 1
140②该同学已经测得电阻R ,继续测电源电动势E,该同学的做法是:闭合S ,将S 切换到b,
1 1 2
多次调节电阻箱,读出多组电阻箱示数R和对应的电流表示数I,由测得的数据,绘出了如
1
图中所示的 −R图线,则电源电动势E=______V
I
③若实际电流表 A 的内阻不可忽略,则 R 的测量值 (填“大于”“等于”或“小
2
于”)真实值
5. (2019新华中学10次统练)物理兴趣小组的一位同学, 发现
了一块比较特殊的电池,于是他组织了几位同学利用以下器
材来测量该电池的电动势和内阻
A.被测电池(电动势在10V15V之间,内阻未知)
B.电阻箱R(020Ω)
C.定值电R (阻值5Ω)
0
D.电流表A (量程2A,内阻较小)
1
E.电流表A (量程0.6A,内阻较小)
2
F.电键
G.导线若干
实验中为了保护电路,用到了包括电池和定值电阻 R 在内的
0
几种实验器材:
①在虚线框内补充实验原理图,并在图中表明所选器材的符号;
1
②同学们利用实验数据做出了通过电源的电流I的倒数 和外电路电阻R(R 除外)的关系图
0
I
1
线,即 -R图线,如右图所示。根据图线求出电池的电动势为__ V,内阻为_ Ω
I
(保留2位有效数字);
○3 测量值和真实值相比,电动势和真实值相比 内阻和真实值相比 (两
E A
空都填“偏大”“相等”或”偏小”)。
1416.(2019红桥2模)用伏特表、安培表测量电源电动势和内电阻的原理是 ,但具体
应用又比较灵活。 现有一特殊电池, 它的电动势E约为10V左右,内阻r约为50Ω,已知
该电池允许输出的最大电流为50mA。为了测量这个电池的电动势和内阻,某同学利用如图
所示的电路进行实验,留中毫安表的内阻R 已经测出,阻值为2Ω,R为电阻箱,阻值范围
A
0999.9Ω,R 为定值电阻,对电路起保护作用。
0
(2)实验室备有的定值电阻R 共有以下几种规格。
0
A.20Ω B.50Ω C.100Ω D.160Ω
本实验选用哪一种规格的定值电阻最好 。
(3)该同学接入符合要求的 R 后,闭合开关 K,调整电阻箱的阻值,读取电流表的示数,
0
记录多组数据,作出了图乙所示的图线,则根据该同学作出的图线可求得该电池的电动势
E= V,内阻r= Ω。
7. (2019南开中学5次月考)某同学设想运用如图甲所示的实验电路,测量未知电阻R 的阻
x
值、电流表A的内阻和电源(内阻忽略不计)的电动势,实验过程中电流表的读数始终符合实
验要求
①为了测量未知电阻R 的阻值,他在闭合开关之前应该将两个电阻箱的阻值调至 (填
x
“最大”或“最小”),然后闭合开关K,将开关K 拨至1位置,调节R 使电流表A有明显
1 2 2
读数I;接着将开关K 拨至2位置,保持R 不变,调节R,当调节R=34.2Ω时,电流表A
0 2 2 1 1
读数仍为I,则该未知电阻的阻值R= Ω 。
0 x
②为了测量电流表A的内阻R 和电源(内阻忽略不计)的电动势E,他将R 的阻值调到
A 1
R=1.5Ω,R 调到最大,将开关K 拨至2位置,闭合开关K;然后多次调节R,并在表格中
1 2 2 1 2
记录下了各次R 的阻值和对应电流表A的读数I;最后根据记录的数据,他画出了如图乙所
2
示的图象,根据你所学的知识和题中所给字母写出该图象对应的函数表达式
为: ;利用图象中的数据可求得,电源(内阻忽略不计)的电动势E=
V。
1428、(2013安徽)(7分)根据闭合电路欧姆定律,用图Ⅰ所示电路
1 2
可以测定电池的电动势和内电阻。图中R 两端的对应电压U ,对
0 12 R
所得的实验数据进行处理,就可以实现测量目的。根据实验数据 0
1
在 −R坐标系中描出坐标点,如图2所示。已知R =150Ω,
U 0
12 S R
请完成以下数据分析和处理。 E n r n 图1
(1)图2中电阻为 Ω的数据点应剔除;
1
(2)在坐标纸上画出 −R关系图线;
u
12
(3)图线的斜率是 (V−1Ω−1),由此可得电池电动势E = V。
n
9、(2010江苏)(8分)在测量电源的电动势和内阻的实验中,由于所用的电压表(视为理
想电压表)的量程较小,某同学设计了如图所示的实物电路。
(1) 试验时,应先将电阻箱的电阻调到____.(选填“最大值”、“最小值”或“任意值”)
(2) 改变电阻箱的阻值 R,分别测出阻值R =10Ω的定值电阻两端的电压 U,下列两组
0
R的取值方案中,比较合理的方案是____.(选填1或2)
1431 1
(3)根据实验数据描点,绘出的 −R图像是一条直线。若直线的斜率为k,在 坐标轴
U U
上的截距为b,则该电源的电动势E= ,内阻r= (用k、b和R 表示)
0
10、(2014全国1)利用如图(a)所示电路,可以测量电源的电动
势和内阻,所用的实验器材有:
待测电源,电阻箱R(最大阻值999.90 Ω),电阻R(阻值为3 Ω),
0
电阻R(阻值为3.0 Ω)。电流表A(量程为200mA,内阻为R =6.0
1 A
Ω),开关S。
实验步骤如下:
①将电阻箱阻值调到最大,闭合开关S;
②多次调解电阻箱,记下电流表的示数I和电阻箱的相应阻值R;
③以1/I为纵坐标,R为横坐标,作图线(用直线拟合);
④求出直线的斜率k和在纵轴的截距b。
回答下列问题:
(1)分别用E和r表示电源的电动势和内阻,则1/I和R的关系式
为 。
(2)实验得到的部分数据如下表所示,其中电阻 R=3.0 Ω时电流
表的示数如图(b)所示,读出数据。完成下表,答:① 。② 。
(3) 在图(c)的坐标纸上讲所缺的数据点补充完整并作图,根据图线求得斜率
k=
A-1Ω-1
,截距b=
A-1
。
(4)根据图线测得电源的电动势E= V,
内阻r= Ω。
144八、U-R 法测测电源电动势和内阻
U 1 1 1 1
1、 电压表理想时:U + r = E,E −r =1把 当纵坐标,把 当横坐标,得线
R U R U R
性图像的截距式,纵轴截距为电动势倒数,横轴截距为内阻倒数。
U
U + r = E
测 测
R
,
U U r U U R R
U +( + )r = E →U(1+ )+ r = E →U + r V = E V
R R R R R R +r R +r
V V V V
R R
比较上下两式:r =r V ,E =E V
测 R +r 测 R +r
V V
1 1
图中纵轴截距为 ,横轴截距为
E r
1
2、读数要点:电阻箱需要从接近零开始取,为了取倒数后在 坐标轴上示数分布稀疏且分
R
布范围较大。比如同样取五个电阻读数,一组为“0.2,0.4,0.6,0.8,1.0 ”,另一组为
“1.0,1.2,1.4,1.6,2.0”,前者取倒数后范围为 1~5,后者范围为 0.5~1.显然前者在图像上的分
布范围大。
3、保护电阻的位置:
145左图横坐标的范围变化小 右图的内阻测得值为真实内阻和保护电阻之和
例题
1.(2015 天津)用电流表和电压表测定由三节干电池
串联组成的电池组(电动势约4.5 V.内电阻约l Ω)
的电动势和内电阻,除待测电池组、电键、导线外,
还有下列器材供选用:
A.电流表:量程0.6A.内电阻约1Ω
B.电流表:量程3A.内电阻约0.2Ω
c.电压表:量程3V.内电阻约30kΩ
D.电压表:量程6 V. 内电阻约60kΩ
E.滑动变阻器:0 ~ 1000Ω .额定电流0.5 A
F.滑动变阻器:0 ~ 20Ω .额定电流2 A
①为了使测量结果尽量准确,电流表应选用 .电压表应选用 ,滑动变阻器应选用
(均填仪器的字母代号)。
②右图为正确选择仪器后.连好的部分电路。为了使测量误差尽可能小,还需在电路中用导
线将 和 相连、 和 相连、 和 相连(均填仪器上接线柱的字母
代号)
③实验时发现电流表坏了,于是不再使用电流表,剩余仪器中用电阻箱替换掉变阻器,重新
连接电路,仍能完成实验。实验中读出几组电阻箱的阻值R和对应电压表的示数U。用图像
法处理采集到的数据,为在直角坐标系中得到的函数图象是一条直线,则可以 为纵坐
标,以 为横坐标。
2、(2011四川)(10分)为测量一电源的电动势及内阻
① 在下列三个电压表中选一个改装成量程为9V的电压表
A. 量程为1V、内阻大约为1KΩ的电压表
B. 量程为2V、内阻大约为2KΩ的电压表
C. 量程为3V、内阻为3KΩ的电压
选择电压表 串联 KΩ的电阻可以改转成量程为9V的电压表
② 利用一个电阻箱、一只开关、若开关导线和改装好的电压表(此表用符号 V ,V 或 V 与
1 2 3
一个电阻串联来表示,且可视为理想电压表),在虚线框内画出测量电源电动势及内阻的试
验原理示图
146③.根据以上试验原理电路图进行实验读出电压表示数为 1.50V 时、电阻箱值为 15.0Ω;电
压表示数为 2.00V 时、电阻箱的阻值为 40.0Ω,则电源的电动势 E= V、内阻
r=___________Ω
3、(2012福建)某研究性学习小组欲测定一块电池的电动势E。
①直接用多用电表测定该电池电动势。在操作无误的情况下,多用电
表表盘示数如图,其示数为___ _V。
②然后,用电压表 、电阻箱 R、定值电阻 R 、开关 S、若干导线
0
和该电池组成电路,测定该电池电动势。
(1)根据电路图,用笔画线代替导线,将实物图连接成完整电路。
(2)闭合开关 S,调整电阻箱阻值R,读出电压表 相应示数U。该学习小组测出大量数
据,分析筛选出下表所示的R、U数据,并计算出相应的1/R与1/U的值。请用表中数据在
坐标纸上描点,并作出1/U-1/R图线。
(3)从图线中可求得电动势E= V。
1474、(2007四川理综)⑵甲同学设计了如图所示的电路测电源电动势E及电
阻R 1 和R 2 阻值。实验器材有:待测电源E(不计内阻),待测电阻R 1 ,待 R R 1
测电阻R ,电压表V(量程为1.5V,内阻很大),电阻箱R(0-99.99Ω),
2
单刀单掷开关S
1
,单刀双掷开关S
2
,导线若干。 a
S 2
V
b
①先测电阻R 的阻值。请将甲同学的操作补充完整:闭合S ,将S 切换
1 1 2 R
2
到a,调节电阻箱,读出其示数r和对应的电压表示数U,保持电阻箱
E S
1
l
示数不变, ,读出电压表的示数U 。则电阻R 的表达式为R =_______。
2 1 1
1
/V-1
U
②甲同学已经测得电阻R
l
=4.8 Ω,继续测电源电动势E和电阻R
2
的阻
2.8
值。该同学的做法是:闭合S ,将S 切换到a,多次调节电阻箱,
1 2
0.7
读出多组电阻箱示数R和对应的电压表示数U,由测得的数据,绘出
了如图所示的
1
−
1
图线,则电源电动势E=_____V,电阻R =
O 0.5 1
/Ω-1
2 R
U R
_____Ω。
③利用甲同学设计的电路和测得的电阻 R,乙同学测电源电动势 E 和电阻 R 的阻值的做法
l 2
是:闭合 S ,将 S 切换到 b,多次调节电阻箱,读出多组电阻箱示数 R 和对应的电压表示
1 2
1 1
数U,由测得的数据,绘出于相应的 - 图线,根据图线得到电源电动势E和电阻R 。
U R + R 2
l
这种做法与甲同学的做法比较,由于电压表测得的数据范围___________(选填“较大”、“较
小”或“相同”),所以___________同学的做法更恰当些。
1485. (2020北京)用图1所示的甲、乙两种方法测量某电源的电动势和内电阻(约为1Ω)。其中R
为电阻箱,电流表的内电阻约为0.1Ω,电压表的内电阻约为3kΩ。
(1)利用图1中甲图实验电路测电源的电动势E和内电阻r,所测量的实际是图2中虚线框所
示“等效电源”的电动势 和内电阻 。若电流表内电阻用 表示,请你用E、r和R 表示出
A
、 ,并简要说明理由𝐸𝐸′_______。𝑟𝑟 ′ 𝑅𝑅𝐴𝐴
𝐸𝐸′ 𝑟𝑟′
(2)某同学利用图像分析甲、乙两种方法中由电表内电阻引起的实验误差。在图3中,实线
是根据实验数据(图甲:U=IR,图乙: ) 描点作图得到的U-I图像;虚线是该电源的路
𝑈𝑈
端电压U随电流I变化的U-I图像(没有𝐼𝐼电=表𝑅𝑅 内电阻影响的理想情况)。
在图3中,对应图甲电路分析的U-I图像是:__________;对应图乙电路分析的U-I图像是:
________。
(3)综合上述分析,为了减小由电表内电阻引起的实验误差,本实验应选择图1中的______(填
“甲”或“乙”)。
1496.某实验小组计划进行“测定电源电动势E和内阻r”的实验,他们首先分析并设计合理的
实验方案。
同学设计了如图甲所示的电路进行实验。实验过程中,闭合开关,调节电阻箱的阻值,读取
电压表的示数 U及电阻箱的阻值 R,然后断开开关,记录 U及 R,重复上述操作,得到多
1
组电压表示数及电阻箱的阻值,以 为纵轴,以 未知 为横轴描点作图,得到如图乙所示
U
的图像,X 应为________,结合图乙可得电源电动x(势 ) ________V,内阻 ________ 。
由于电压表不是理想电表,故电动势的测量值_______E_=,内阻的测量值___r_=____。 后两Ω空
均选填“偏大”或“偏小” (
)
150

