文档内容
第11 章-简单机械和功(杠杆实验探究题题)-【期末试题汇
编】2022-2023苏科版九年级物理上学期期末复习专题精炼
一.探究杠杆的平衡条件
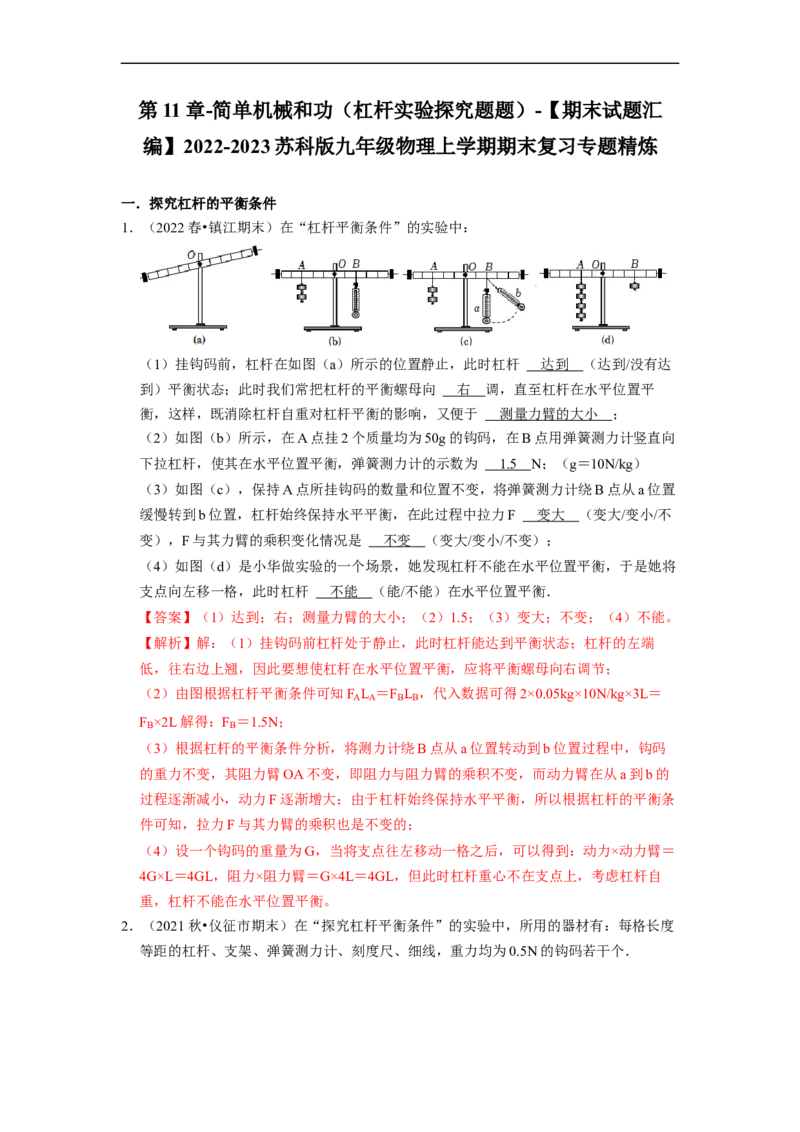
1.(2022春•镇江期末)在“杠杆平衡条件”的实验中:
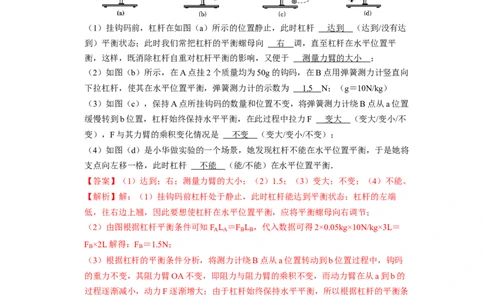
(1)挂钩码前,杠杆在如图(a)所示的位置静止,此时杠杆 达到 (达到/没有达
到)平衡状态;此时我们常把杠杆的平衡螺母向 右 调,直至杠杆在水平位置平
衡,这样,既消除杠杆自重对杠杆平衡的影响,又便于 测量力臂的大小 ;
(2)如图(b)所示,在A点挂2个质量均为50g的钩码,在B点用弹簧测力计竖直向
下拉杠杆,使其在水平位置平衡,弹簧测力计的示数为 1. 5 N;(g=10N/kg)
(3)如图(c),保持A点所挂钩码的数量和位置不变,将弹簧测力计绕B点从a位置
缓慢转到b位置,杠杆始终保持水平平衡,在此过程中拉力F 变大 (变大/变小/不
变),F与其力臂的乘积变化情况是 不变 (变大/变小/不变);
(4)如图(d)是小华做实验的一个场景,她发现杠杆不能在水平位置平衡,于是她将
支点向左移一格,此时杠杆 不能 (能/不能)在水平位置平衡.
【答案】(1)达到;右;测量力臂的大小;(2)1.5;(3)变大;不变;(4)不能。
【解析】解:(1)挂钩码前杠杆处于静止,此时杠杆能达到平衡状态;杠杆的左端
低,往右边上翘,因此要想使杠杆在水平位置平衡,应将平衡螺母向右调节;
(2)由图根据杠杆平衡条件可知F L =F L ,代入数据可得2×0.05kg×10N/kg×3L=
A A B B
F ×2L解得:F =1.5N;
B B
(3)根据杠杆的平衡条件分析,将测力计绕B点从a位置转动到b位置过程中,钩码
的重力不变,其阻力臂OA不变,即阻力与阻力臂的乘积不变,而动力臂在从a到b的
过程逐渐减小,动力F逐渐增大;由于杠杆始终保持水平平衡,所以根据杠杆的平衡条
件可知,拉力F与其力臂的乘积也是不变的;
(4)设一个钩码的重量为G,当将支点往左移动一格之后,可以得到:动力×动力臂=
4G×L=4GL,阻力×阻力臂=G×4L=4GL,但此时杠杆重心不在支点上,考虑杠杆自
重,杠杆不能在水平位置平衡。
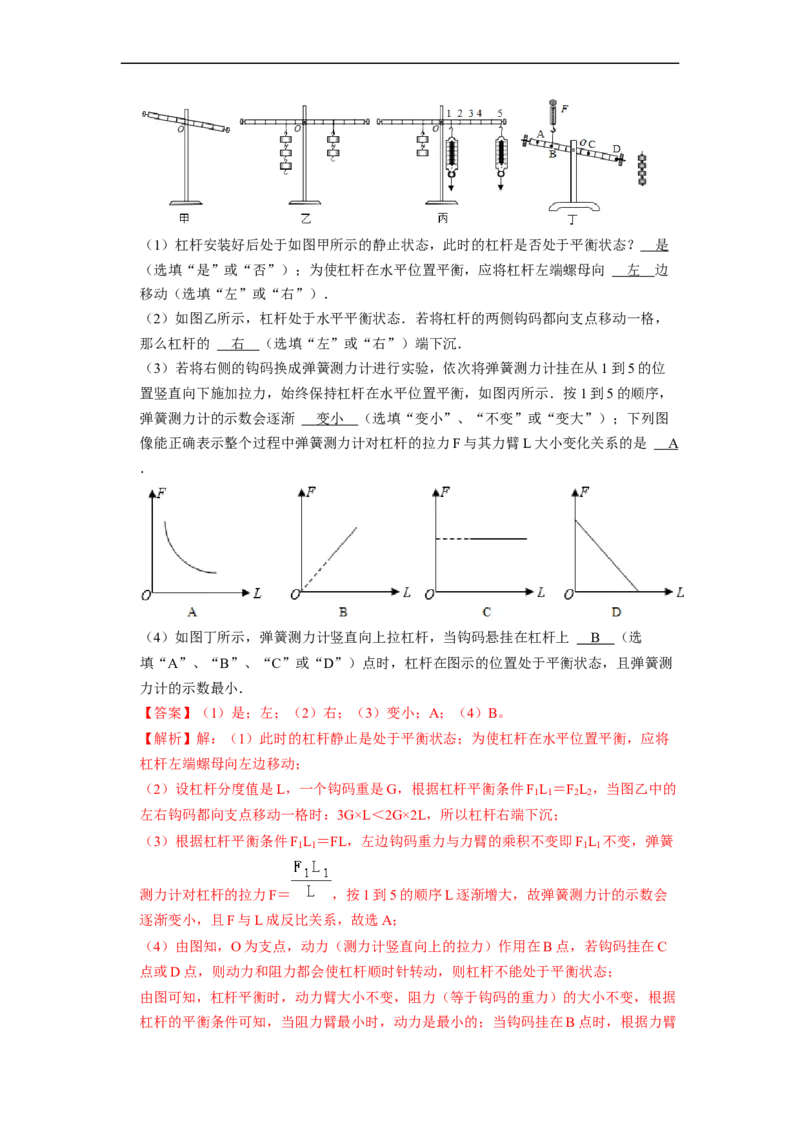
2.(2021秋•仪征市期末)在“探究杠杆平衡条件”的实验中,所用的器材有:每格长度
等距的杠杆、支架、弹簧测力计、刻度尺、细线,重力均为0.5N的钩码若干个.(1)杠杆安装好后处于如图甲所示的静止状态,此时的杠杆是否处于平衡状态? 是
(选填“是”或“否”);为使杠杆在水平位置平衡,应将杠杆左端螺母向 左 边
移动(选填“左”或“右”).
(2)如图乙所示,杠杆处于水平平衡状态.若将杠杆的两侧钩码都向支点移动一格,
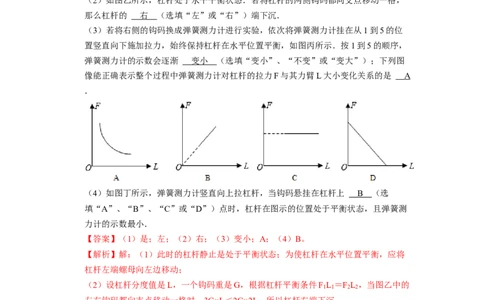
那么杠杆的 右 (选填“左”或“右”)端下沉.
(3)若将右侧的钩码换成弹簧测力计进行实验,依次将弹簧测力计挂在从1到5的位
置竖直向下施加拉力,始终保持杠杆在水平位置平衡,如图丙所示.按1到5的顺序,
弹簧测力计的示数会逐渐 变小 (选填“变小”、“不变”或“变大”);下列图
像能正确表示整个过程中弹簧测力计对杠杆的拉力F与其力臂L大小变化关系的是 A
.
(4)如图丁所示,弹簧测力计竖直向上拉杠杆,当钩码悬挂在杠杆上 B (选
填“A”、“B”、“C”或“D”)点时,杠杆在图示的位置处于平衡状态,且弹簧测
力计的示数最小.
【答案】(1)是;左;(2)右;(3)变小;A;(4)B。
【解析】解:(1)此时的杠杆静止是处于平衡状态;为使杠杆在水平位置平衡,应将
杠杆左端螺母向左边移动;
(2)设杠杆分度值是L,一个钩码重是G,根据杠杆平衡条件F L =F L ,当图乙中的
1 1 2 2
左右钩码都向支点移动一格时:3G×L<2G×2L,所以杠杆右端下沉;
(3)根据杠杆平衡条件F L =FL,左边钩码重力与力臂的乘积不变即F L 不变,弹簧
1 1 1 1
测力计对杠杆的拉力F= ,按1到5的顺序L逐渐增大,故弹簧测力计的示数会
逐渐变小,且F与L成反比关系,故选A;
(4)由图知,O为支点,动力(测力计竖直向上的拉力)作用在B点,若钩码挂在C
点或D点,则动力和阻力都会使杠杆顺时针转动,则杠杆不能处于平衡状态;
由图可知,杠杆平衡时,动力臂大小不变,阻力(等于钩码的重力)的大小不变,根据
杠杆的平衡条件可知,当阻力臂最小时,动力是最小的;当钩码挂在B点时,根据力臂的定义可知,此时的阻力臂是最小的,则此时动力最小,测力计的示数最小。
故选:B。
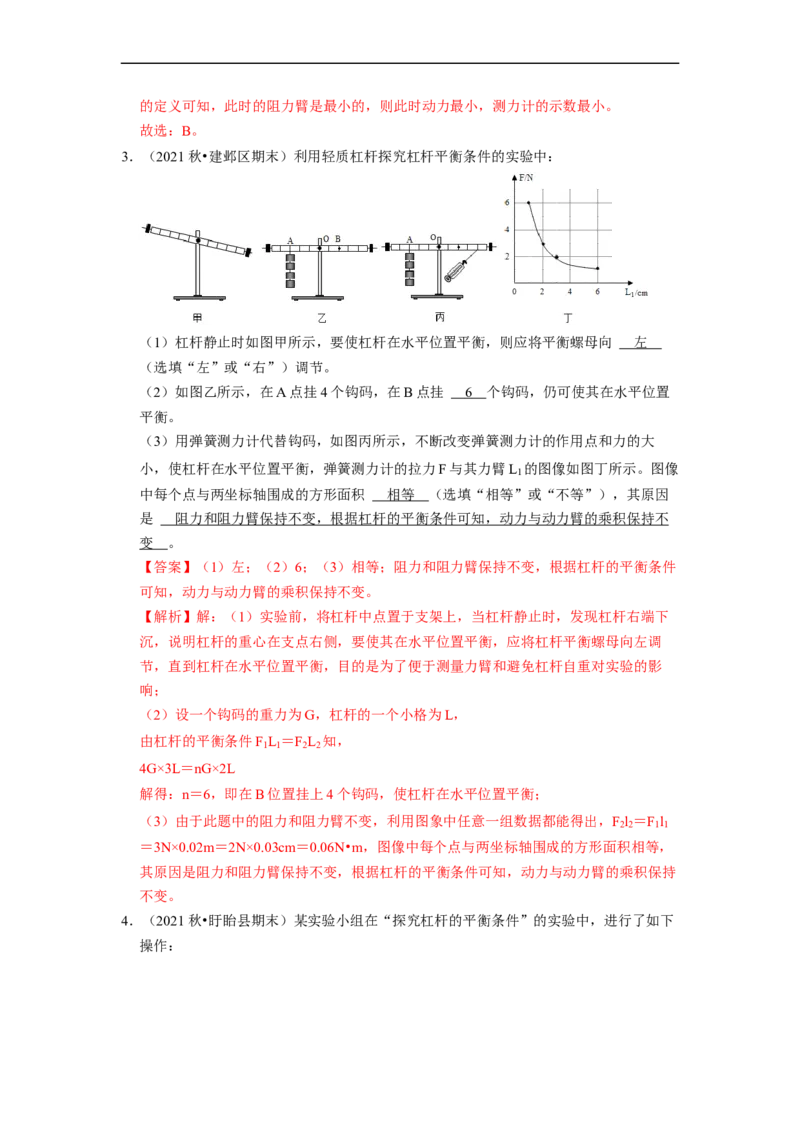
3.(2021秋•建邺区期末)利用轻质杠杆探究杠杆平衡条件的实验中:
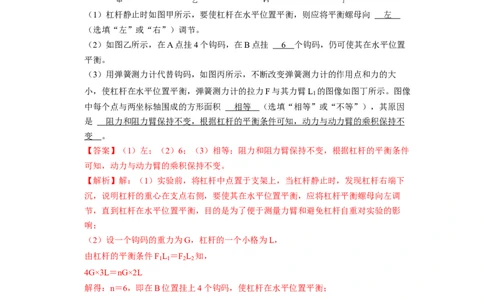
(1)杠杆静止时如图甲所示,要使杠杆在水平位置平衡,则应将平衡螺母向 左
(选填“左”或“右”)调节。
(2)如图乙所示,在A点挂4个钩码,在B点挂 6 个钩码,仍可使其在水平位置
平衡。
(3)用弹簧测力计代替钩码,如图丙所示,不断改变弹簧测力计的作用点和力的大
小,使杠杆在水平位置平衡,弹簧测力计的拉力F与其力臂L 的图像如图丁所示。图像
1
中每个点与两坐标轴围成的方形面积 相等 (选填“相等”或“不等”),其原因
是 阻力和阻力臂保持不变,根据杠杆的平衡条件可知,动力与动力臂的乘积保持不
变 。
【答案】(1)左;(2)6;(3)相等;阻力和阻力臂保持不变,根据杠杆的平衡条件
可知,动力与动力臂的乘积保持不变。
【解析】解:(1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下
沉,说明杠杆的重心在支点右侧,要使其在水平位置平衡,应将杠杆平衡螺母向左调
节,直到杠杆在水平位置平衡,目的是为了便于测量力臂和避免杠杆自重对实验的影
响;
(2)设一个钩码的重力为G,杠杆的一个小格为L,
由杠杆的平衡条件F L =F L 知,
1 1 2 2
4G×3L=nG×2L
解得:n=6,即在B位置挂上4个钩码,使杠杆在水平位置平衡;
(3)由于此题中的阻力和阻力臂不变,利用图象中任意一组数据都能得出,F l =F l
22 11
=3N×0.02m=2N×0.03cm=0.06N•m,图像中每个点与两坐标轴围成的方形面积相等,
其原因是阻力和阻力臂保持不变,根据杠杆的平衡条件可知,动力与动力臂的乘积保持
不变。
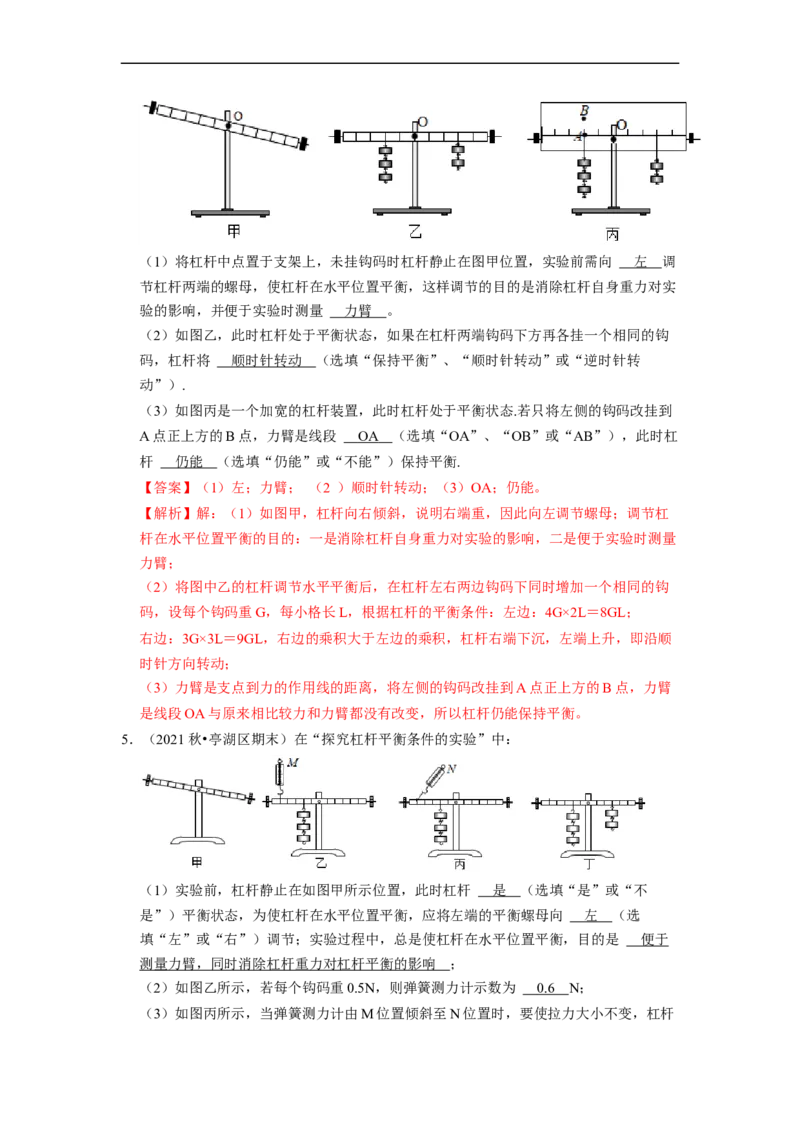
4.(2021秋•盱眙县期末)某实验小组在“探究杠杆的平衡条件”的实验中,进行了如下
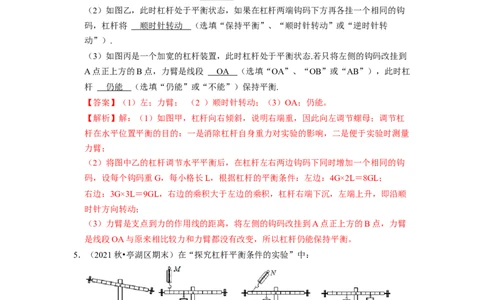
操作:(1)将杠杆中点置于支架上,未挂钩码时杠杆静止在图甲位置,实验前需向 左 调
节杠杆两端的螺母,使杠杆在水平位置平衡,这样调节的目的是消除杠杆自身重力对实
验的影响,并便于实验时测量 力臂 。
(2)如图乙,此时杠杆处于平衡状态,如果在杠杆两端钩码下方再各挂一个相同的钩
码,杠杆将 顺时针转动 (选填“保持平衡”、“顺时针转动”或“逆时针转
动”).
(3)如图丙是一个加宽的杠杆装置,此时杠杆处于平衡状态.若只将左侧的钩码改挂到
A点正上方的B点,力臂是线段 OA (选填“OA”、“OB”或“AB”),此时杠
杆 仍能 (选填“仍能”或“不能”)保持平衡.
【答案】(1)左;力臂; (2 )顺时针转动;(3)OA;仍能。
【解析】解:(1)如图甲,杠杆向右倾斜,说明右端重,因此向左调节螺母;调节杠
杆在水平位置平衡的目的:一是消除杠杆自身重力对实验的影响,二是便于实验时测量
力臂;
(2)将图中乙的杠杆调节水平平衡后,在杠杆左右两边钩码下同时增加一个相同的钩
码,设每个钩码重G,每小格长L,根据杠杆的平衡条件:左边:4G×2L=8GL;
右边:3G×3L=9GL,右边的乘积大于左边的乘积,杠杆右端下沉,左端上升,即沿顺
时针方向转动;
(3)力臂是支点到力的作用线的距离,将左侧的钩码改挂到A点正上方的B点,力臂
是线段OA与原来相比较力和力臂都没有改变,所以杠杆仍能保持平衡。
5.(2021秋•亭湖区期末)在“探究杠杆平衡条件的实验”中:
(1)实验前,杠杆静止在如图甲所示位置,此时杠杆 是 (选填“是”或“不
是”)平衡状态,为使杠杆在水平位置平衡,应将左端的平衡螺母向 左 (选
填“左”或“右”)调节;实验过程中,总是使杠杆在水平位置平衡,目的是 便于
测量力臂,同时消除杠杆重力对杠杆平衡的影响 ;
(2)如图乙所示,若每个钩码重0.5N,则弹簧测力计示数为 0. 6 N;
(3)如图丙所示,当弹簧测力计由M位置倾斜至N位置时,要使拉力大小不变,杠杆继续在水平位置处于平衡,则应 减小 (选填“增大”或“减小”)悬挂的钩码总
质量;
(4)如图丁所示,杠杆在水平位置平衡,如果在杠杆两侧各去掉一个相同的钩码,则
杠杆 右 (选填“左”或“右”)端将上翘。
【答案】(1)是;左;便于测量力臂,同时消除杠杆重力对杠杆平衡的影响;(2)
0.6;(3)减小;(4)右。
【解析】解:(1)杠杆的位置如图甲所示,此时杠杆处于静止状态时,是处于平衡状
态;杠杆的右端下沉,说明杠杆的重心在支点右侧,故应将平衡螺母向左调节,直到杠
杆在水平位置平衡,目的是便于测量力臂,同时消除杠杆重力对杠杆平衡的影响;
(2)设杠杆一个小格为 L,根据杠杆平衡条件F L =F L 得,
1 1 2 2
F ×5L=3×0.5N×2L,则F =0.6N;
1 1
(3)若拉力F向右倾斜时,此时F的力臂变短,根据杠杆的平衡条件,则F和L乘积
变小,要使拉力大小不变,杠杆继续在水平位置处于平衡,根据杠杆平衡条件可知,钩
码力臂不变,应减小钩码总质量;
(4)设一个钩码的重力为G,杠杆一个小格代表L,如果在图丁中杠杆两侧各去掉一个
相同的钩码时,
杠杆的左端:2G×2L=4GL,杠杆的右端:1G×3L=3GL,所以杠杆的右端力和力臂的
乘积小于左端的乘积,所以杠杆右端上翘。
6.(2021秋•南京期末)在“探究杠杆的平衡条件”实验中:
实验次数 动力F /N 动力臂L /m 阻力F /N 阻力臂L /m
1 1 2 2
1 2 0.3 3 0.2
2 4 0.4 8 0.2
3 5 0.3 6 0.25
(1)将杠杆的中点置于支架上,当杠杆停在如图所示的位置时, 处于 (选填“处
于”或“不处于”)平衡状态。这时应向 右 (选填“左”或“右”)端调节平衡
螺母,直到杠杆在水平位置平衡,这是为了方便测量 力臂 ;
(2)记录实验数据的表格如上表,请完善第2次实验中一个数据。
(3)有的同学按方案得出如下结论:“动力×支点到动力作用点的距离=阻力×支点到
阻力作用点的距离”,这个结论与杠杆平衡条件不符,原因是实验过程中 B 。
A.没有改变力的大小
B.没有改变力的方向
C.没有改变力的作用点
D.实验次数较少,结论具有偶然性【答案】(1)处于;右;力臂;(2)8;(3)B。
【解析】解:(1)杠杆停在如图所示的位置保持静止处于平衡状态。这时应向右端调
节平衡螺母,直到杠杆在水平位置平衡,这是为了方便测量力臂的大小;
(2)由表格数据分析可知,实验是探究动力、动力臂与阻力、阻力臂之间的关系,则
第二组数据4N×0.4m=0.2m×F ,解得:F =8N;
2 2
(3)在“探究杠杆的平衡条件”实验中,在调平衡时一般都把杠杆的平衡位置调到水
平位置,这样当力的作用线在竖直方向时,从支点到力的作用点的距离就是力的力臂,
若要使力臂与支点到力的作用点的距离不等,可以改变力的方向,故选;B。
7.(2021秋•姑苏区校级期末)在“探究杠杆的平衡条件”实验中。
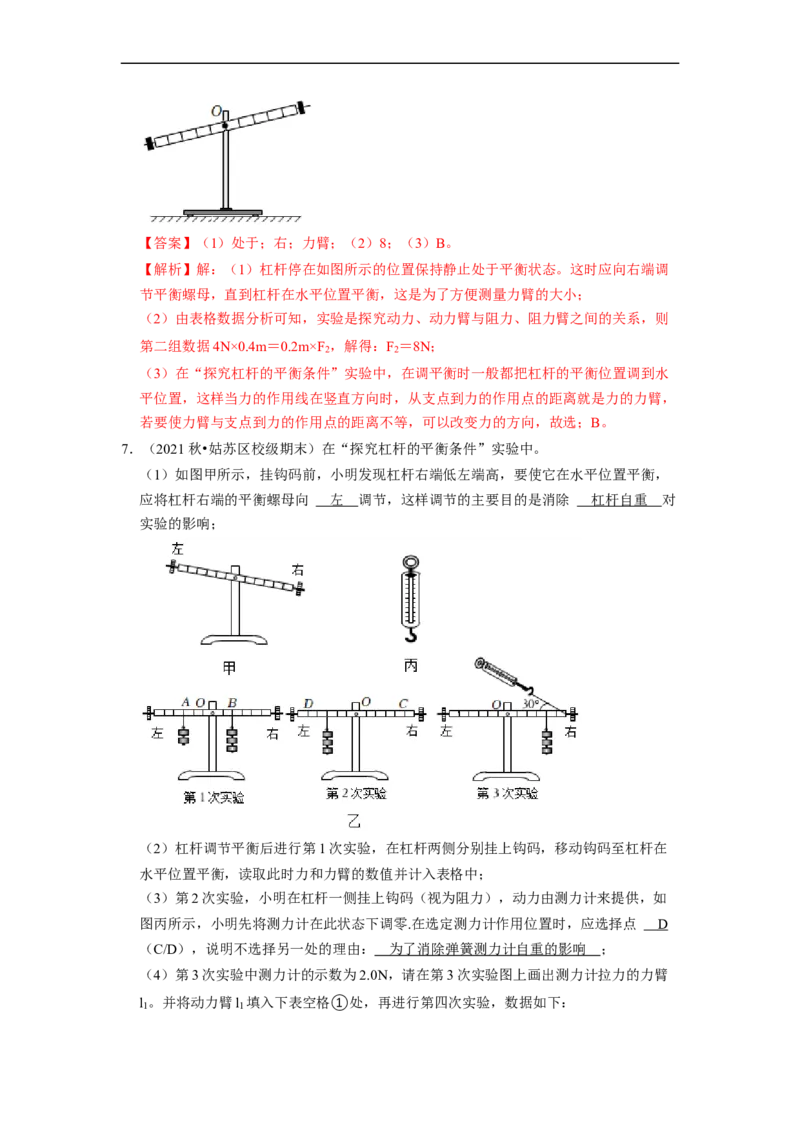
(1)如图甲所示,挂钩码前,小明发现杠杆右端低左端高,要使它在水平位置平衡,
应将杠杆右端的平衡螺母向 左 调节,这样调节的主要目的是消除 杠杆自重 对
实验的影响;
(2)杠杆调节平衡后进行第1次实验,在杠杆两侧分别挂上钩码,移动钩码至杠杆在
水平位置平衡,读取此时力和力臂的数值并计入表格中;
(3)第2次实验,小明在杠杆一侧挂上钩码(视为阻力),动力由测力计来提供,如
图丙所示,小明先将测力计在此状态下调零.在选定测力计作用位置时,应选择点 D
(C/D),说明不选择另一处的理由: 为了消除弹簧测力计自重的影响 ;
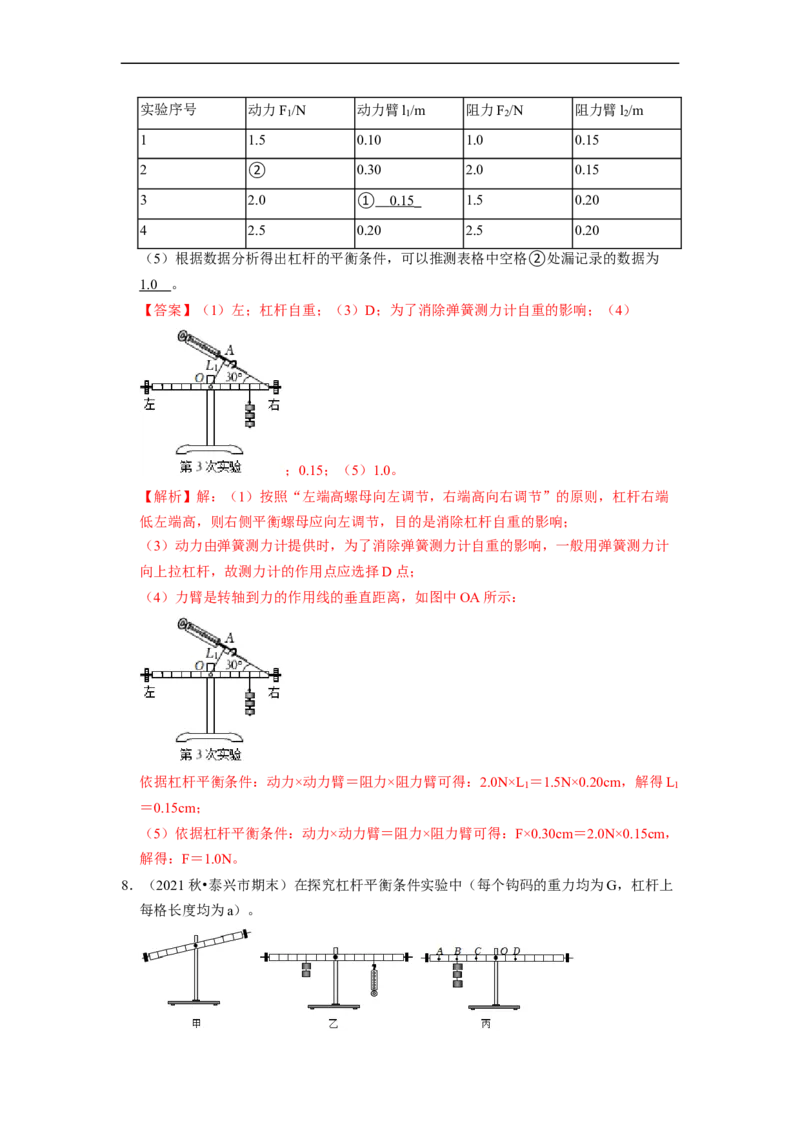
(4)第3次实验中测力计的示数为2.0N,请在第3次实验图上画出测力计拉力的力臂
l 。并将动力臂l 填入下表空格①处,再进行第四次实验,数据如下:
1 1实验序号 动力F /N 动力臂l /m 阻力F /N 阻力臂l /m
1 1 2 2
1 1.5 0.10 1.0 0.15
2 ② 0.30 2.0 0.15
3 2.0 ① 0.1 5 1.5 0.20
4 2.5 0.20 2.5 0.20
(5)根据数据分析得出杠杆的平衡条件,可以推测表格中空格②处漏记录的数据为
1.0 。
【答案】(1)左;杠杆自重;(3)D;为了消除弹簧测力计自重的影响;(4)
;0.15;(5)1.0。
【解析】解:(1)按照“左端高螺母向左调节,右端高向右调节”的原则,杠杆右端
低左端高,则右侧平衡螺母应向左调节,目的是消除杠杆自重的影响;
(3)动力由弹簧测力计提供时,为了消除弹簧测力计自重的影响,一般用弹簧测力计
向上拉杠杆,故测力计的作用点应选择D点;
(4)力臂是转轴到力的作用线的垂直距离,如图中OA所示:
依据杠杆平衡条件:动力×动力臂=阻力×阻力臂可得:2.0N×L =1.5N×0.20cm,解得L
1 1
=0.15cm;
(5)依据杠杆平衡条件:动力×动力臂=阻力×阻力臂可得:F×0.30cm=2.0N×0.15cm,
解得:F=1.0N。
8.(2021秋•泰兴市期末)在探究杠杆平衡条件实验中(每个钩码的重力均为G,杠杆上
每格长度均为a)。(1)实验前,杠杆如图甲所示,可将杠杆两端的平衡螺母向 右 (选
填“左”或“右”)调节,使杠杆在水平位置平衡,这样做的好处是可以直接从杠杆上
读出 力臂 。
(2)如果小明面对甲图状况,没有调水平平衡就匆忙进行乙图实验(弹簧测力计的挂
钩钩在4格处),杠杆虽然此时水平平衡,但可以判断:2G•3a 小于 F •4a(选
1
填“大于”或“小于”或“等于”,F 是弹簧测力计的示数);
1
(3)重新调节杠杆平衡后,如图丙所示,在杠杆B点挂3个相同的钩码,可在杠杆的
D点挂 6 个相同的钩码,就可使杠杆重新在水平位置平衡。
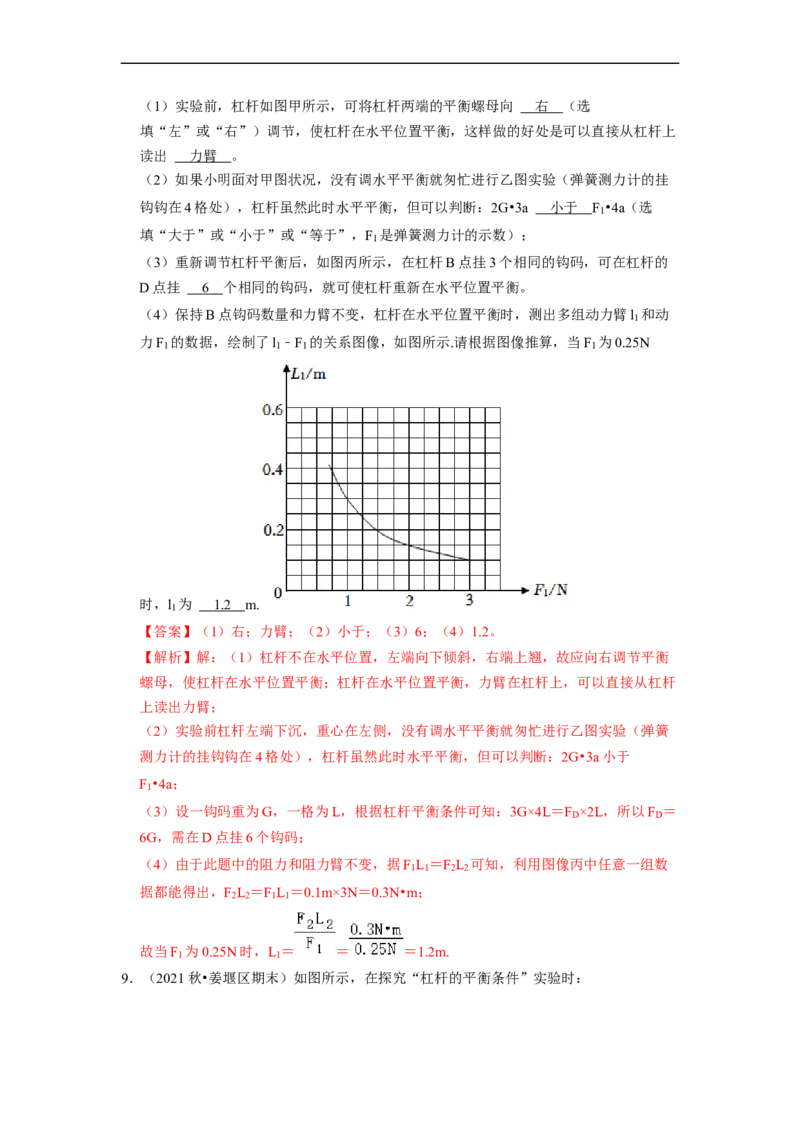
(4)保持B点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂l 和动
1
力F 的数据,绘制了l ﹣F 的关系图像,如图所示.请根据图像推算,当F 为0.25N
1 1 1 1
时,l 为 1. 2 m.
1
【答案】(1)右;力臂;(2)小于;(3)6;(4)1.2。
【解析】解:(1)杠杆不在水平位置,左端向下倾斜,右端上翘,故应向右调节平衡
螺母,使杠杆在水平位置平衡;杠杆在水平位置平衡,力臂在杠杆上,可以直接从杠杆
上读出力臂;
(2)实验前杠杆左端下沉,重心在左侧,没有调水平平衡就匆忙进行乙图实验(弹簧
测力计的挂钩钩在4格处),杠杆虽然此时水平平衡,但可以判断:2G•3a小于
F •4a;
1
(3)设一钩码重为G,一格为L,根据杠杆平衡条件可知:3G×4L=F ×2L,所以F =
D D
6G,需在D点挂6个钩码;
(4)由于此题中的阻力和阻力臂不变,据F L =F L 可知,利用图像丙中任意一组数
1 1 2 2
据都能得出,F L =F L =0.1m×3N=0.3N•m;
2 2 1 1
故当F 为0.25N时,L = = =1.2m.
1 1
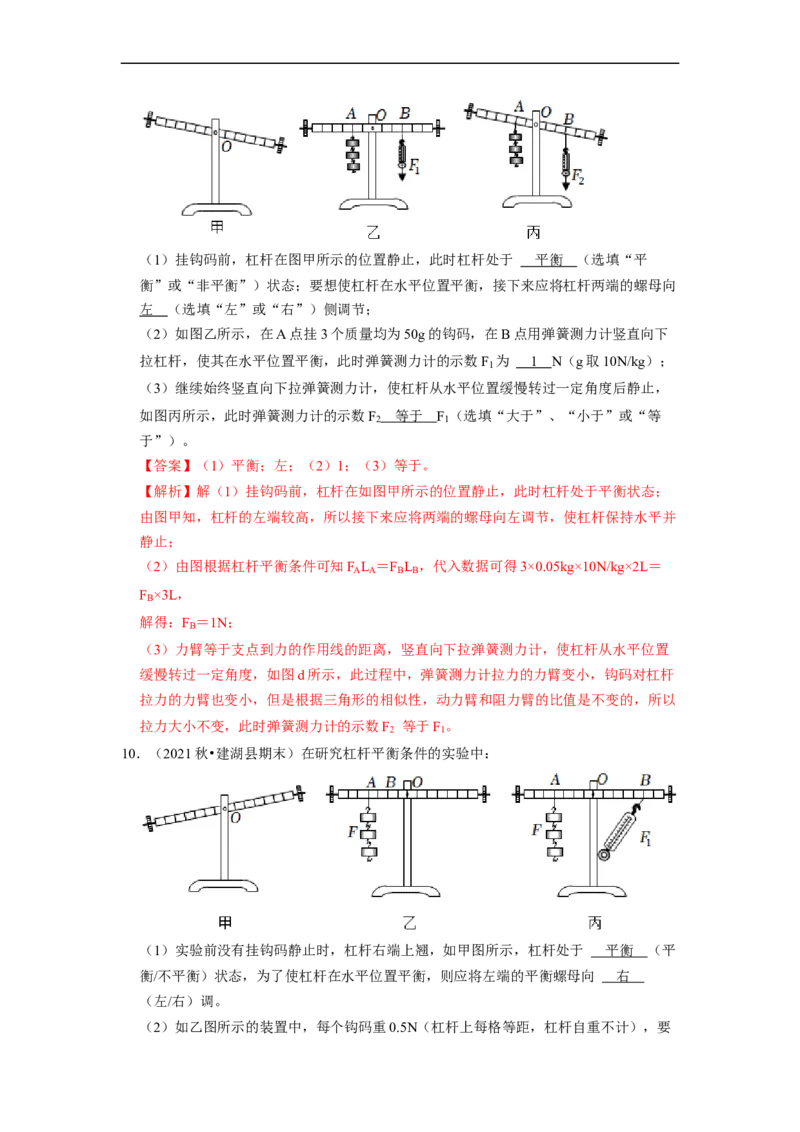
9.(2021秋•姜堰区期末)如图所示,在探究“杠杆的平衡条件”实验时:(1)挂钩码前,杠杆在图甲所示的位置静止,此时杠杆处于 平衡 (选填“平
衡”或“非平衡”)状态;要想使杠杆在水平位置平衡,接下来应将杠杆两端的螺母向
左 (选填“左”或“右”)侧调节;
(2)如图乙所示,在A点挂3个质量均为50g的钩码,在B点用弹簧测力计竖直向下
拉杠杆,使其在水平位置平衡,此时弹簧测力计的示数F 为 1 N(g取10N/kg);
1
(3)继续始终竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度后静止,
如图丙所示,此时弹簧测力计的示数F 等于 F (选填“大于”、“小于”或“等
2 1
于”)。
【答案】(1)平衡;左;(2)1;(3)等于。
【解析】解(1)挂钩码前,杠杆在如图甲所示的位置静止,此时杠杆处于平衡状态;
由图甲知,杠杆的左端较高,所以接下来应将两端的螺母向左调节,使杠杆保持水平并
静止;
(2)由图根据杠杆平衡条件可知F L =F L ,代入数据可得3×0.05kg×10N/kg×2L=
A A B B
F ×3L,
B
解得:F =1N;
B
(3)力臂等于支点到力的作用线的距离,竖直向下拉弹簧测力计,使杠杆从水平位置
缓慢转过一定角度,如图d所示,此过程中,弹簧测力计拉力的力臂变小,钩码对杠杆
拉力的力臂也变小,但是根据三角形的相似性,动力臂和阻力臂的比值是不变的,所以
拉力大小不变,此时弹簧测力计的示数F 等于F 。
2 1
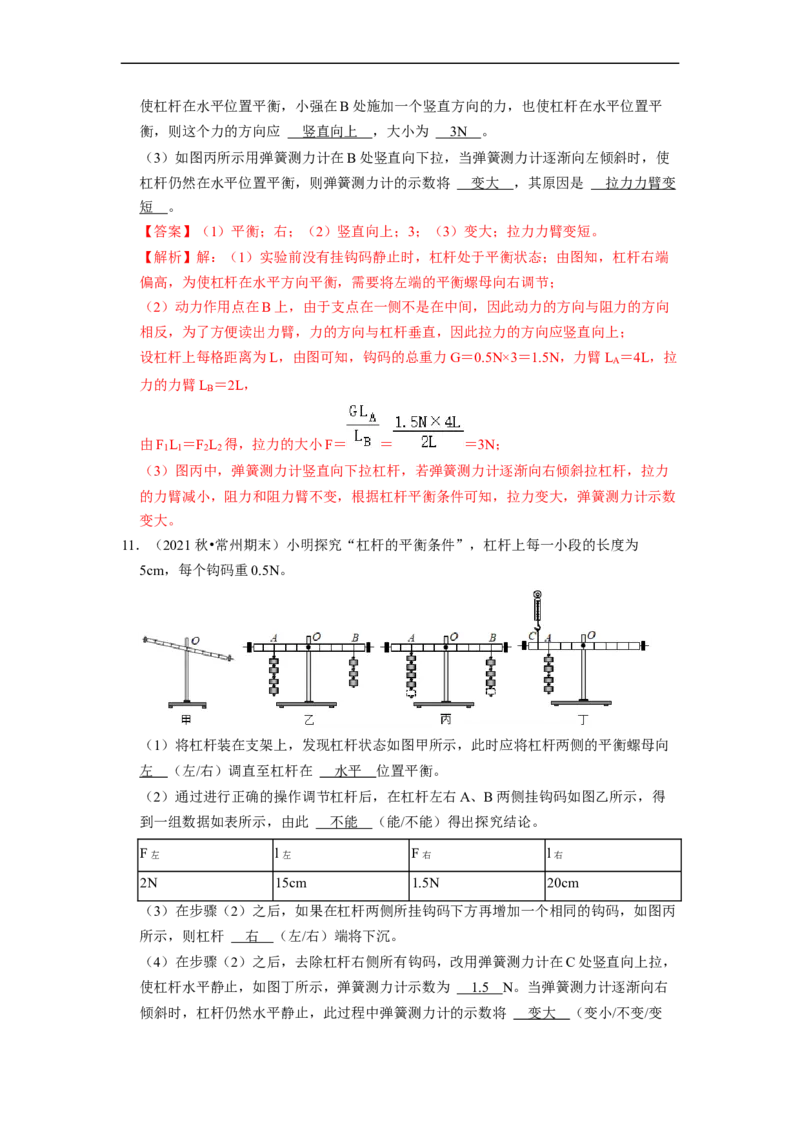
10.(2021秋•建湖县期末)在研究杠杆平衡条件的实验中:
(1)实验前没有挂钩码静止时,杠杆右端上翘,如甲图所示,杠杆处于 平衡 (平
衡/不平衡)状态,为了使杠杆在水平位置平衡,则应将左端的平衡螺母向 右
(左/右)调。
(2)如乙图所示的装置中,每个钩码重0.5N(杠杆上每格等距,杠杆自重不计),要使杠杆在水平位置平衡,小强在B处施加一个竖直方向的力,也使杠杆在水平位置平
衡,则这个力的方向应 竖直向上 ,大小为 3N 。
(3)如图丙所示用弹簧测力计在B处竖直向下拉,当弹簧测力计逐渐向左倾斜时,使
杠杆仍然在水平位置平衡,则弹簧测力计的示数将 变大 ,其原因是 拉力力臂变
短 。
【答案】(1)平衡;右;(2)竖直向上;3;(3)变大;拉力力臂变短。
【解析】解:(1)实验前没有挂钩码静止时,杠杆处于平衡状态;由图知,杠杆右端
偏高,为使杠杆在水平方向平衡,需要将左端的平衡螺母向右调节;
(2)动力作用点在B上,由于支点在一侧不是在中间,因此动力的方向与阻力的方向
相反,为了方便读出力臂,力的方向与杠杆垂直,因此拉力的方向应竖直向上;
设杠杆上每格距离为L,由图可知,钩码的总重力G=0.5N×3=1.5N,力臂L =4L,拉
A
力的力臂L =2L,
B
由F L =F L 得,拉力的大小F= = =3N;
1 1 2 2
(3)图丙中,弹簧测力计竖直向下拉杠杆,若弹簧测力计逐渐向右倾斜拉杠杆,拉力
的力臂减小,阻力和阻力臂不变,根据杠杆平衡条件可知,拉力变大,弹簧测力计示数
变大。
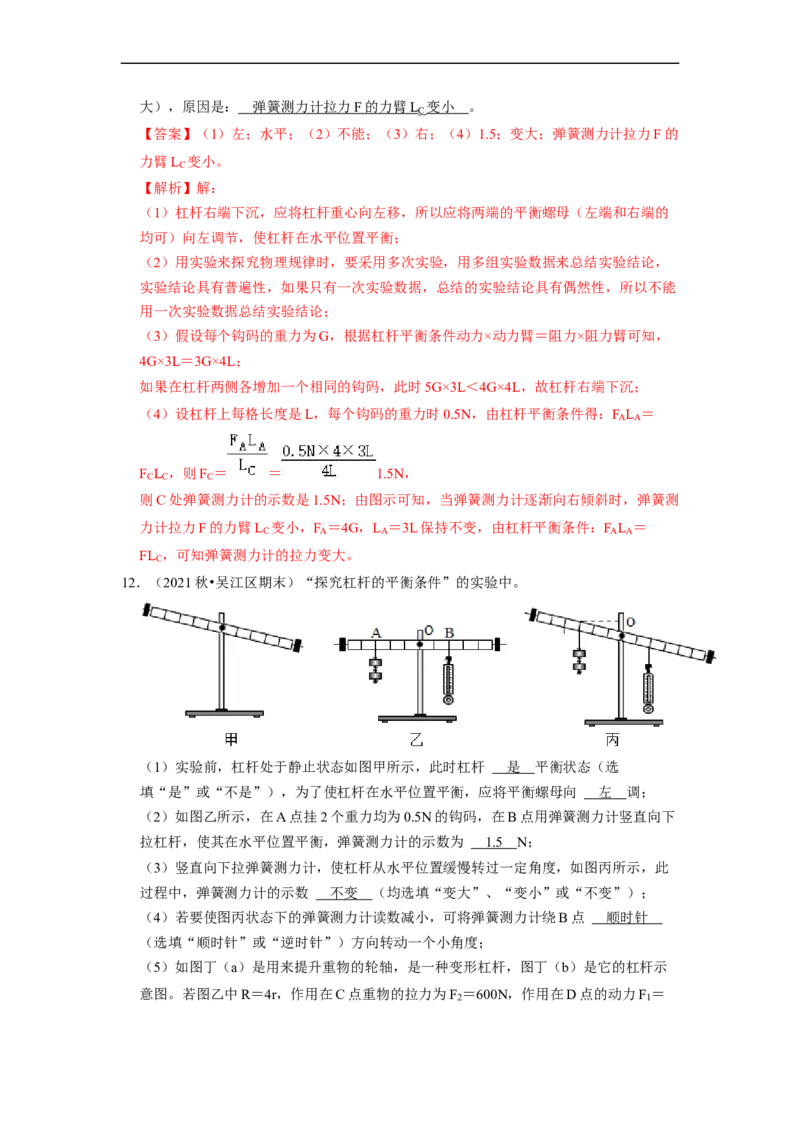
11.(2021秋•常州期末)小明探究“杠杆的平衡条件”,杠杆上每一小段的长度为
5cm,每个钩码重0.5N。
(1)将杠杆装在支架上,发现杠杆状态如图甲所示,此时应将杠杆两侧的平衡螺母向
左 (左/右)调直至杠杆在 水平 位置平衡。
(2)通过进行正确的操作调节杠杆后,在杠杆左右A、B两侧挂钩码如图乙所示,得
到一组数据如表所示,由此 不能 (能/不能)得出探究结论。
F左 l左 F右 l右
2N 15cm 1.5N 20cm
(3)在步骤(2)之后,如果在杠杆两侧所挂钩码下方再增加一个相同的钩码,如图丙
所示,则杠杆 右 (左/右)端将下沉。
(4)在步骤(2)之后,去除杠杆右侧所有钩码,改用弹簧测力计在C处竖直向上拉,
使杠杆水平静止,如图丁所示,弹簧测力计示数为 1. 5 N。当弹簧测力计逐渐向右
倾斜时,杠杆仍然水平静止,此过程中弹簧测力计的示数将 变大 (变小/不变/变大),原因是: 弹簧测力计拉力 F 的力臂 L 变小 。
C
【答案】(1)左;水平;(2)不能;(3)右;(4)1.5;变大;弹簧测力计拉力F的
力臂L 变小。
C
【解析】解:
(1)杠杆右端下沉,应将杠杆重心向左移,所以应将两端的平衡螺母(左端和右端的
均可)向左调节,使杠杆在水平位置平衡;
(2)用实验来探究物理规律时,要采用多次实验,用多组实验数据来总结实验结论,
实验结论具有普遍性,如果只有一次实验数据,总结的实验结论具有偶然性,所以不能
用一次实验数据总结实验结论;
(3)假设每个钩码的重力为G,根据杠杆平衡条件动力×动力臂=阻力×阻力臂可知,
4G×3L=3G×4L;
如果在杠杆两侧各增加一个相同的钩码,此时5G×3L<4G×4L,故杠杆右端下沉;
(4)设杠杆上每格长度是L,每个钩码的重力时0.5N,由杠杆平衡条件得:F L =
A A
F L ,则F = = 1.5N,
C C C
则C处弹簧测力计的示数是1.5N;由图示可知,当弹簧测力计逐渐向右倾斜时,弹簧测
力计拉力F的力臂L 变小,F =4G,L =3L保持不变,由杠杆平衡条件:F L =
C A A A A
FL ,可知弹簧测力计的拉力变大。
C
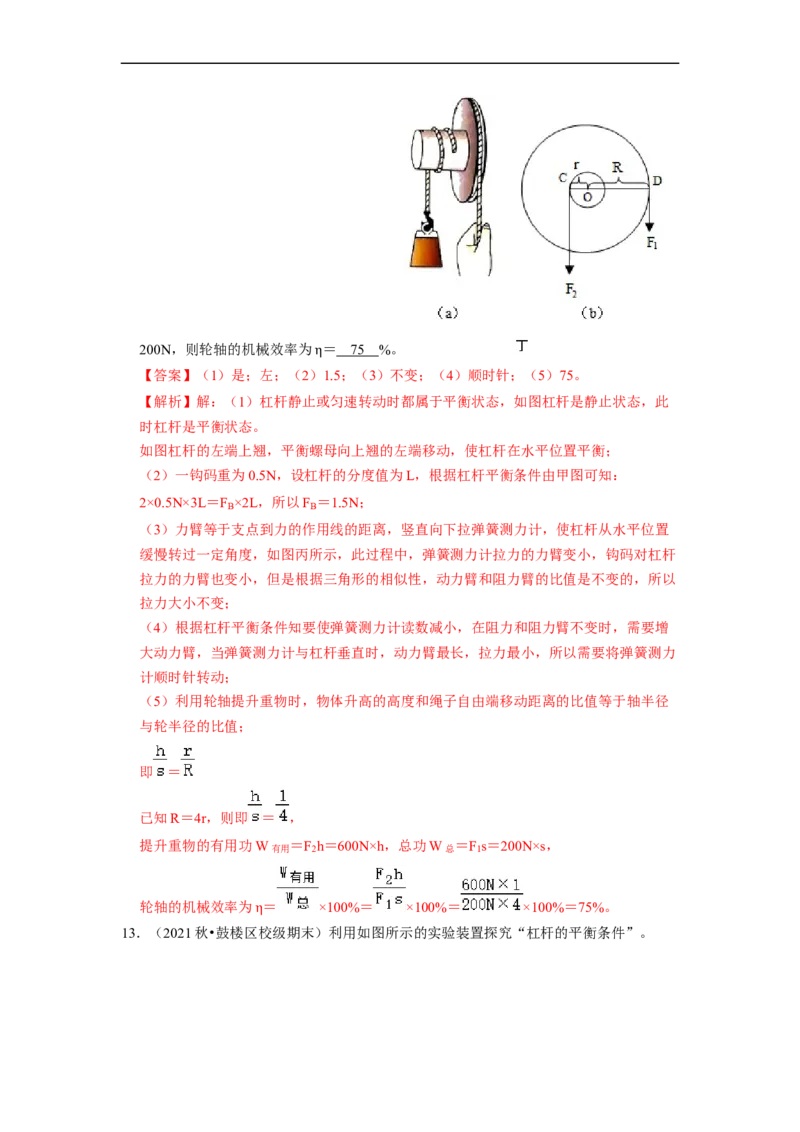
12.(2021秋•吴江区期末)“探究杠杆的平衡条件”的实验中。
(1)实验前,杠杆处于静止状态如图甲所示,此时杠杆 是 平衡状态(选
填“是”或“不是”),为了使杠杆在水平位置平衡,应将平衡螺母向 左 调;
(2)如图乙所示,在A点挂2个重力均为0.5N的钩码,在B点用弹簧测力计竖直向下
拉杠杆,使其在水平位置平衡,弹簧测力计的示数为 1. 5 N;
(3)竖直向下拉弹簧测力计,使杠杆从水平位置缓慢转过一定角度,如图丙所示,此
过程中,弹簧测力计的示数 不变 (均选填“变大”、“变小”或“不变”);
(4)若要使图丙状态下的弹簧测力计读数减小,可将弹簧测力计绕B点 顺时针
(选填“顺时针”或“逆时针”)方向转动一个小角度;
(5)如图丁(a)是用来提升重物的轮轴,是一种变形杠杆,图丁(b)是它的杠杆示
意图。若图乙中R=4r,作用在C点重物的拉力为F =600N,作用在D点的动力F =
2 1200N,则轮轴的机械效率为 = 7 5 %。
【答案】(1)是;左;(2)1.5;(3)不变;(4)顺时针;(5)75。
η
【解析】解:(1)杠杆静止或匀速转动时都属于平衡状态,如图杠杆是静止状态,此
时杠杆是平衡状态。
如图杠杆的左端上翘,平衡螺母向上翘的左端移动,使杠杆在水平位置平衡;
(2)一钩码重为0.5N,设杠杆的分度值为L,根据杠杆平衡条件由甲图可知:
2×0.5N×3L=F ×2L,所以F =1.5N;
B B
(3)力臂等于支点到力的作用线的距离,竖直向下拉弹簧测力计,使杠杆从水平位置
缓慢转过一定角度,如图丙所示,此过程中,弹簧测力计拉力的力臂变小,钩码对杠杆
拉力的力臂也变小,但是根据三角形的相似性,动力臂和阻力臂的比值是不变的,所以
拉力大小不变;
(4)根据杠杆平衡条件知要使弹簧测力计读数减小,在阻力和阻力臂不变时,需要增
大动力臂,当弹簧测力计与杠杆垂直时,动力臂最长,拉力最小,所以需要将弹簧测力
计顺时针转动;
(5)利用轮轴提升重物时,物体升高的高度和绳子自由端移动距离的比值等于轴半径
与轮半径的比值;
即 =
已知R=4r,则即 = ,
提升重物的有用功W有用 =F
2
h=600N×h,总功W总 =F
1
s=200N×s,
轮轴的机械效率为 = ×100%= ×100%= ×100%=75%。
13.(2021秋•鼓楼区校级期末)利用如图所示的实验装置探究“杠杆的平衡条件”。
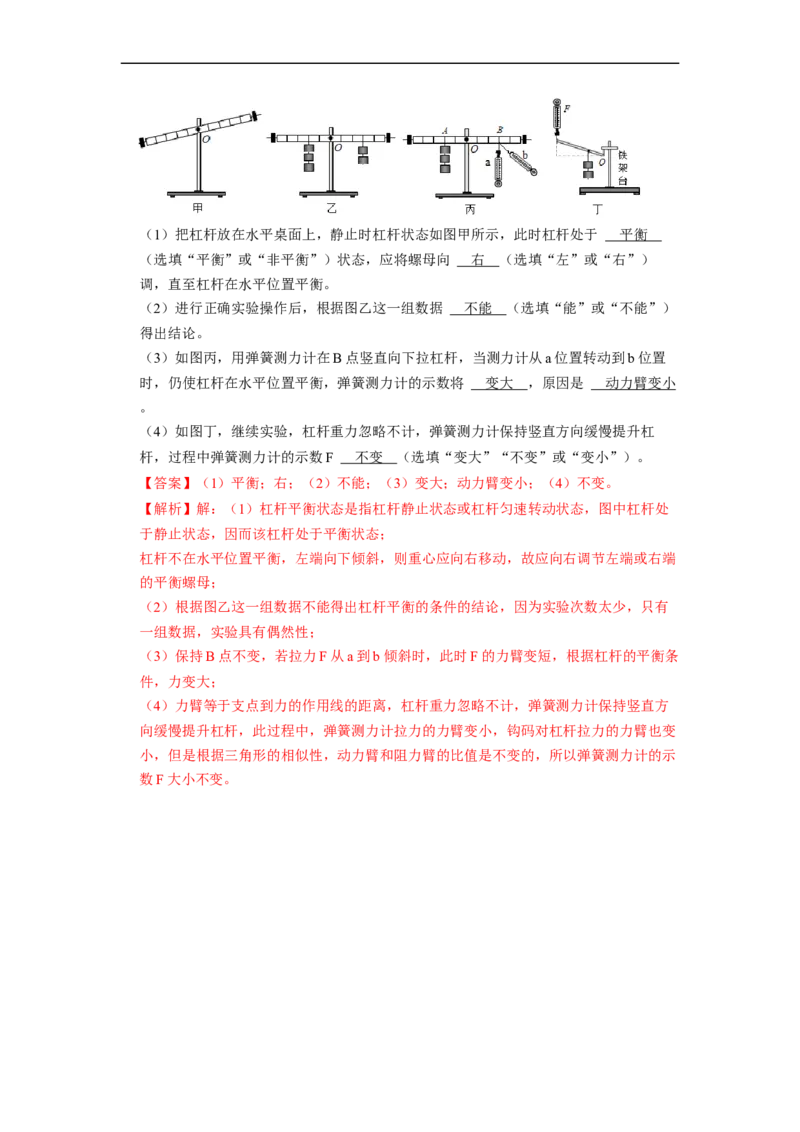
η(1)把杠杆放在水平桌面上,静止时杠杆状态如图甲所示,此时杠杆处于 平衡
(选填“平衡”或“非平衡”)状态,应将螺母向 右 (选填“左”或“右”)
调,直至杠杆在水平位置平衡。
(2)进行正确实验操作后,根据图乙这一组数据 不能 (选填“能”或“不能”)
得出结论。
(3)如图丙,用弹簧测力计在B点竖直向下拉杠杆,当测力计从a位置转动到b位置
时,仍使杠杆在水平位置平衡,弹簧测力计的示数将 变大 ,原因是 动力臂变小
。
(4)如图丁,继续实验,杠杆重力忽略不计,弹簧测力计保持竖直方向缓慢提升杠
杆,过程中弹簧测力计的示数F 不变 (选填“变大”“不变”或“变小”)。
【答案】(1)平衡;右;(2)不能;(3)变大;动力臂变小;(4)不变。
【解析】解:(1)杠杆平衡状态是指杠杆静止状态或杠杆匀速转动状态,图中杠杆处
于静止状态,因而该杠杆处于平衡状态;
杠杆不在水平位置平衡,左端向下倾斜,则重心应向右移动,故应向右调节左端或右端
的平衡螺母;
(2)根据图乙这一组数据不能得出杠杆平衡的条件的结论,因为实验次数太少,只有
一组数据,实验具有偶然性;
(3)保持B点不变,若拉力F从a到b倾斜时,此时F的力臂变短,根据杠杆的平衡条
件,力变大;
(4)力臂等于支点到力的作用线的距离,杠杆重力忽略不计,弹簧测力计保持竖直方
向缓慢提升杠杆,此过程中,弹簧测力计拉力的力臂变小,钩码对杠杆拉力的力臂也变
小,但是根据三角形的相似性,动力臂和阻力臂的比值是不变的,所以弹簧测力计的示
数F大小不变。

