文档内容
专题 10 杠杆与滑轮 【十大题型】
一.力臂的画法(共4小题)
二.杠杆的平衡条件(共7小题)
三.探究杠杆的平衡条件(共3小题)
四.杠杆的动态平衡分析(共4小题)
五.杠杆的平衡分析法及其应用(共7小题)
六.杠杆中最小力的问题(共5小题)
七.杠杆的应用(共4小题)
八.动滑轮拉力的计算(共4小题)
九.滑轮组的设计与组装(共4小题)
十.滑轮组中的相关计算(共4小题)
一.力臂的画法(共4小题)
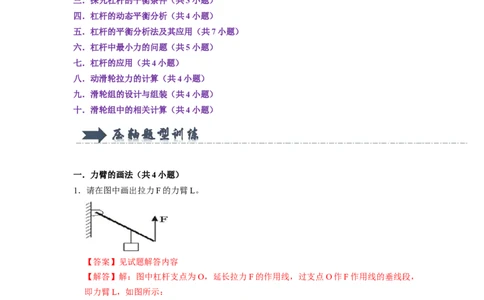
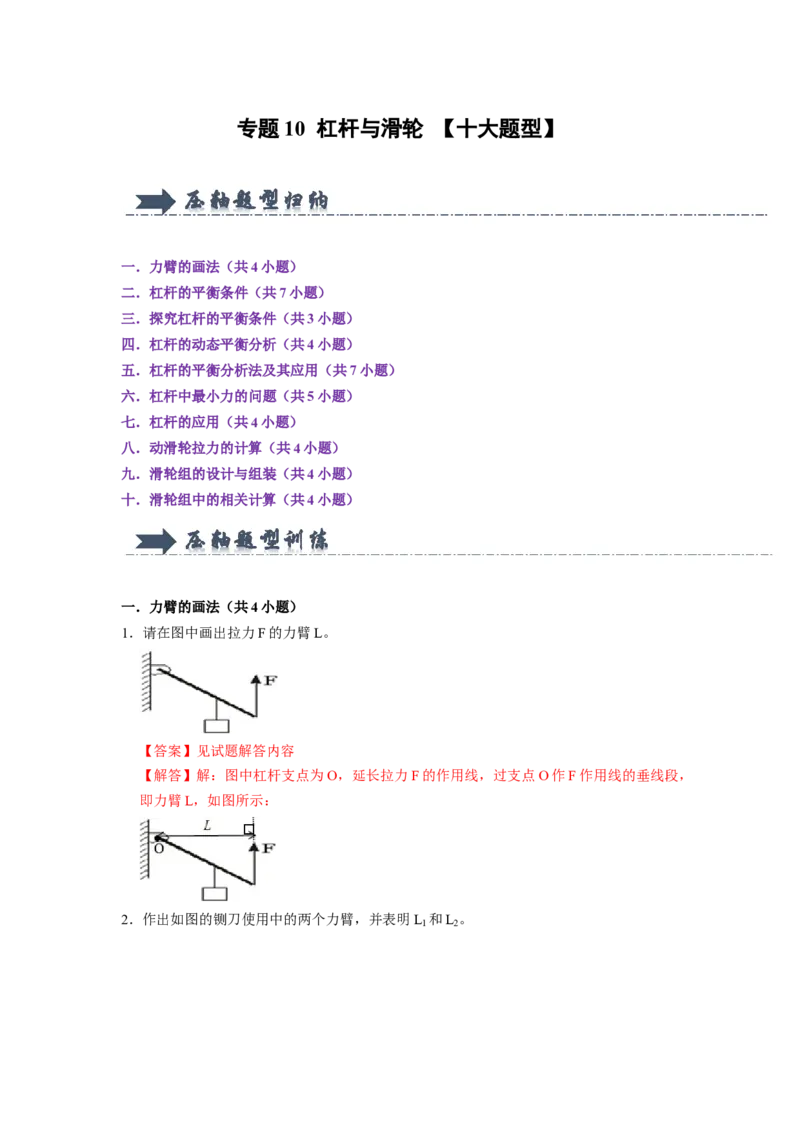
1.请在图中画出拉力F的力臂L。
【答案】见试题解答内容
【解答】解:图中杠杆支点为O,延长拉力F的作用线,过支点O作F作用线的垂线段,
即力臂L,如图所示:
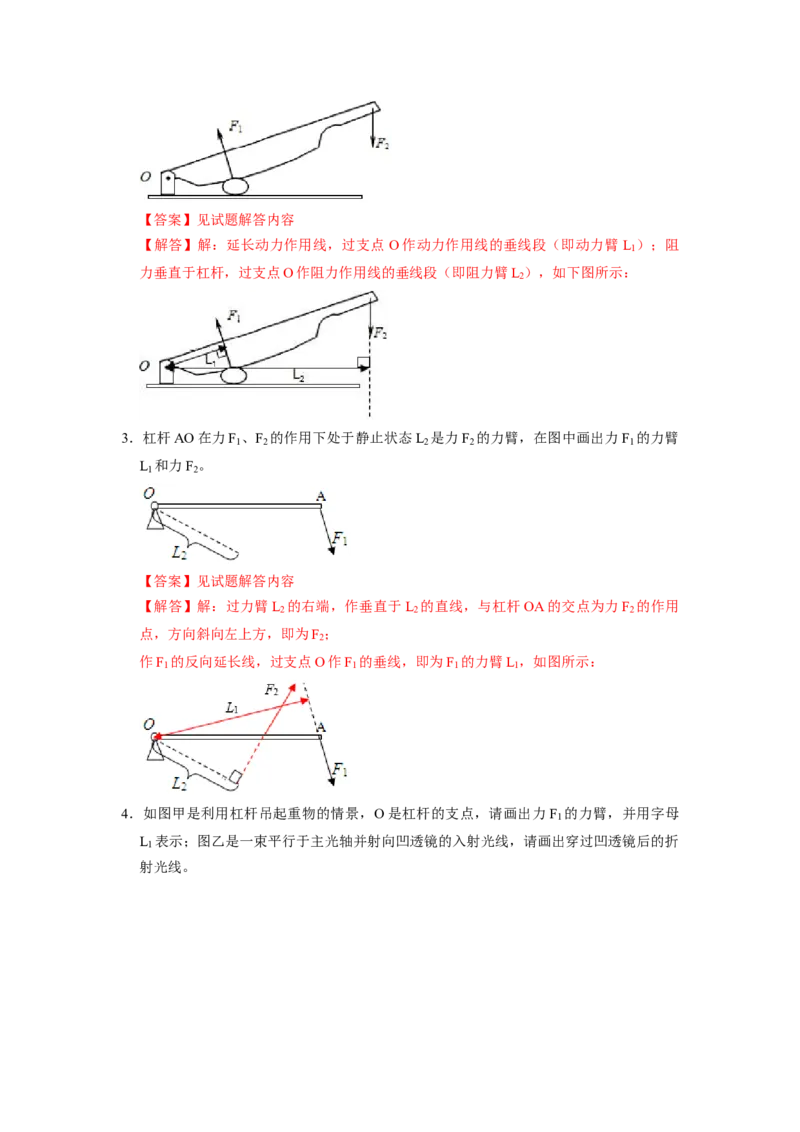
2.作出如图的铡刀使用中的两个力臂,并表明L 和L 。
1 2【答案】见试题解答内容
【解答】解:延长动力作用线,过支点 O作动力作用线的垂线段(即动力臂 L );阻
1
力垂直于杠杆,过支点O作阻力作用线的垂线段(即阻力臂L ),如下图所示:
2
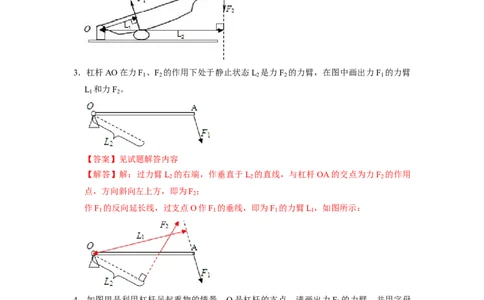
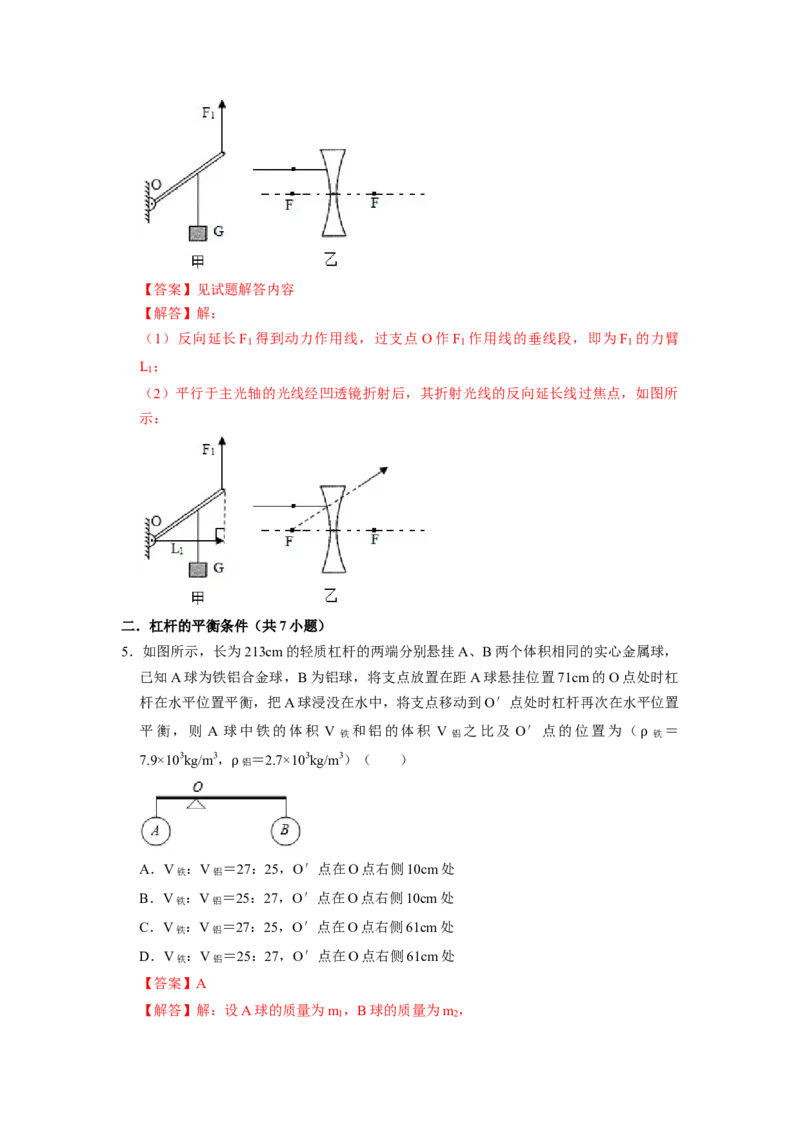
3.杠杆AO在力F 、F 的作用下处于静止状态L 是力F 的力臂,在图中画出力F 的力臂
1 2 2 2 1
L 和力F 。
1 2
【答案】见试题解答内容
【解答】解:过力臂L 的右端,作垂直于L 的直线,与杠杆OA的交点为力F 的作用
2 2 2
点,方向斜向左上方,即为F ;
2
作F 的反向延长线,过支点O作F 的垂线,即为F 的力臂L ,如图所示:
1 1 1 1
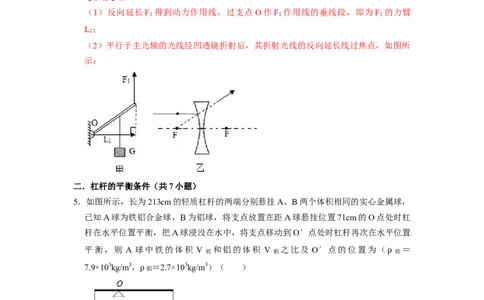
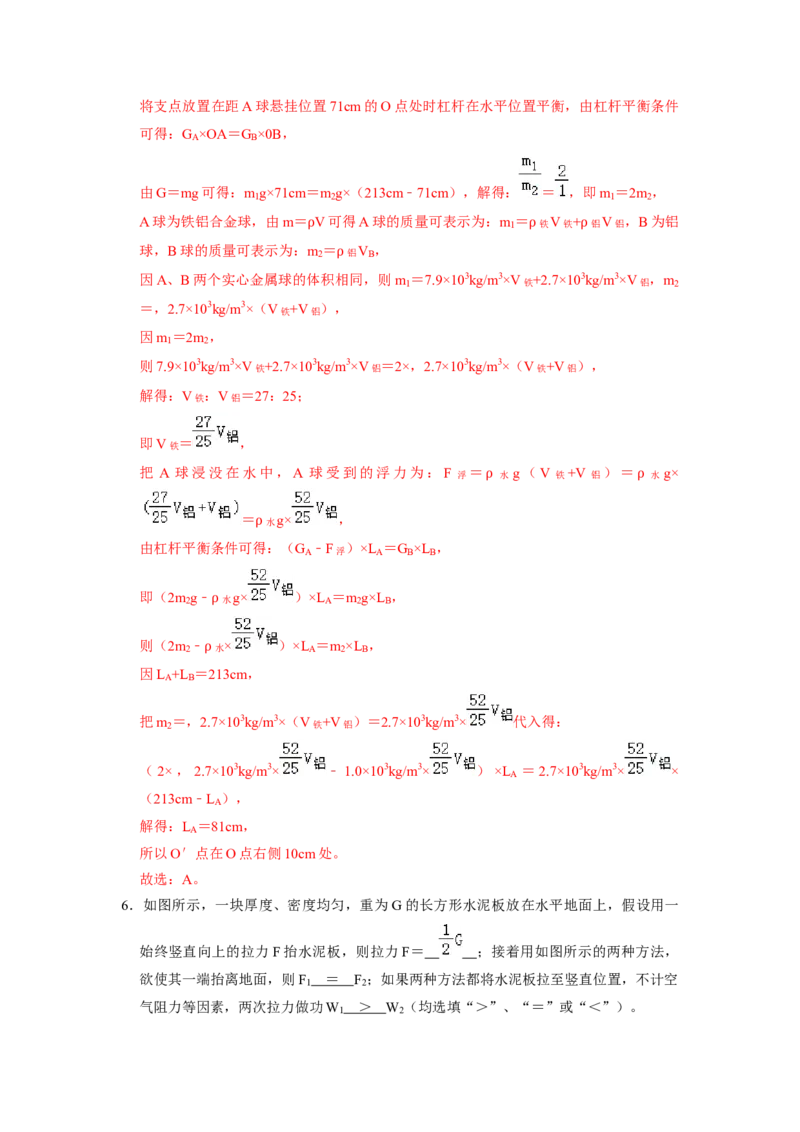
4.如图甲是利用杠杆吊起重物的情景,O是杠杆的支点,请画出力F 的力臂,并用字母
1
L 表示;图乙是一束平行于主光轴并射向凹透镜的入射光线,请画出穿过凹透镜后的折
1
射光线。【答案】见试题解答内容
【解答】解:
(1)反向延长F 得到动力作用线,过支点O作F 作用线的垂线段,即为F 的力臂
1 1 1
L ;
1
(2)平行于主光轴的光线经凹透镜折射后,其折射光线的反向延长线过焦点,如图所
示:
二.杠杆的平衡条件(共7小题)
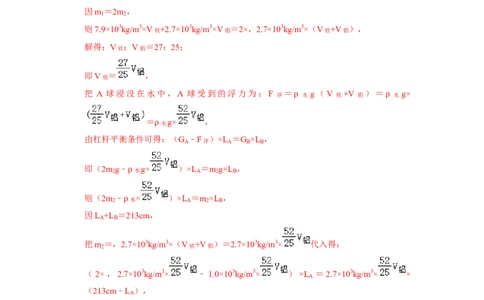
5.如图所示,长为213cm的轻质杠杆的两端分别悬挂A、B两个体积相同的实心金属球,
已知A球为铁铝合金球,B为铝球,将支点放置在距A球悬挂位置71cm的O点处时杠
杆在水平位置平衡,把A球浸没在水中,将支点移动到O′点处时杠杆再次在水平位置
平衡,则 A 球中铁的体积 V 铁 和铝的体积 V 铝 之比及 O′点的位置为( 铁 =
7.9×103kg/m3,
铝
=2.7×103kg/m3)( )
ρ
ρ
A.V铁 :V铝 =27:25,O′点在O点右侧10cm处
B.V铁 :V铝 =25:27,O′点在O点右侧10cm处
C.V铁 :V铝 =27:25,O′点在O点右侧61cm处
D.V铁 :V铝 =25:27,O′点在O点右侧61cm处
【答案】A
【解答】解:设A球的质量为m ,B球的质量为m ,
1 2将支点放置在距A球悬挂位置71cm的O点处时杠杆在水平位置平衡,由杠杆平衡条件
可得:G ×OA=G ×0B,
A B
由G=mg可得:m g×71cm=m g×(213cm﹣71cm),解得: = ,即m =2m ,
1 2 1 2
A球为铁铝合金球,由m= V可得A球的质量可表示为:m
1
= 铁V铁+ 铝V铝 ,B为铝
球,B球的质量可表示为:mρ2 = 铝V B , ρ ρ
因A、B两个实心金属球的体积相ρ 同,则m
1
=7.9×103kg/m3×V铁+2.7×103kg/m3×V铝 ,m
2
=,2.7×103kg/m3×(V铁+V铝 ),
因m =2m ,
1 2
则7.9×103kg/m3×V铁+2.7×103kg/m3×V铝 =2×,2.7×103kg/m3×(V铁+V铝 ),
解得:V铁 :V铝 =27:25;
即V铁 = ,
把 A 球浸没在水中,A 球受到的浮力为:F 浮 = 水 g(V 铁+V 铝 )= 水 g×
ρ ρ
= 水g× ,
由杠杆平衡条件可得ρ:(G
A
﹣F浮 )×L
A
=G
B
×L
B
,
即(2m
2
g﹣ 水g× )×L
A
=m
2
g×L
B
,
ρ
则(2m
2
﹣ 水× )×L
A
=m
2
×L
B
,
因L
A
+L
B
= ρ213cm,
把m
2
=,2.7×103kg/m3×(V铁+V铝 )=2.7×103kg/m3× 代入得:
(2×,2.7×103kg/m3× ﹣1.0×103kg/m3× )×L =2.7×103kg/m3× ×
A
(213cm﹣L ),
A
解得:L =81cm,
A
所以O′点在O点右侧10cm处。
故选:A。
6.如图所示,一块厚度、密度均匀,重为G的长方形水泥板放在水平地面上,假设用一
始终竖直向上的拉力F抬水泥板,则拉力F= ;接着用如图所示的两种方法,
欲使其一端抬离地面,则F = F ;如果两种方法都将水泥板拉至竖直位置,不计空
1 2
气阻力等因素,两次拉力做功W > W (均选填“>”、“=”或“<”)。
1 2【答案】 ;=;>。
【解答】解:(1)假设用一始终垂直于水泥板的拉力F抬水泥板,在水泥板抬起过程
中阻力不变、阻力臂变小、动力臂不变,根据杠杆平衡条件可知动力F变小;
(1)两次抬起水泥板时的情况如图所示:
在上述两种情况下,动力克服的都是水泥板的重力,对于形状规则质地均匀的物体,其
重心都在其几何中心上,所以阻力臂都等于动力臂的二分之一。根据杠杆的平衡条件 F
= = G,所以前后两次所用的力相同。
(2)若甲、乙两种情况均将水泥板拉至竖直位置,由图可知h甲 >h乙 ,
因为拉力做功W甲 =Gh甲 ,W乙 =Gh乙 ,所以W甲 >W乙 。
故答案为: ;=;>。
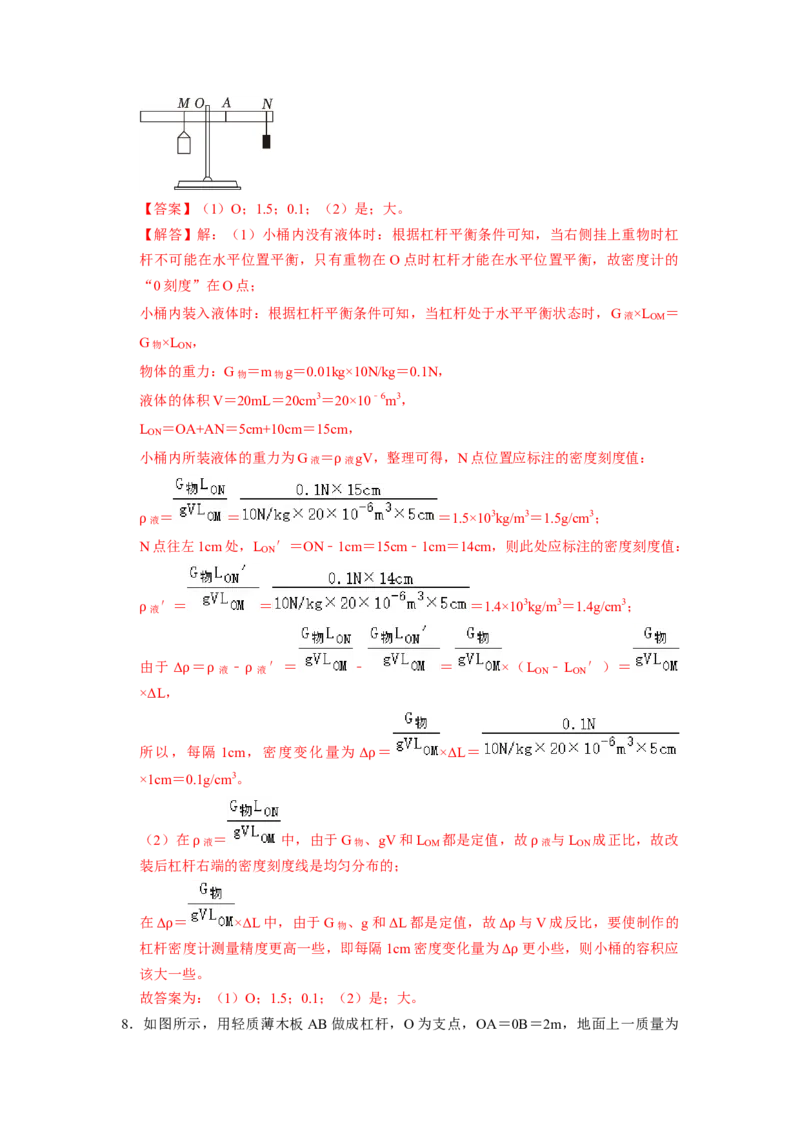
7.小红同学自制了测量液体密度的“杠杆密度计”,可以从杠杆上的刻度直接读出液体密
度的数值:(小桶质量忽略不计)
(1)如图所示,将容积为20mL的小桶挂在M点,调节平衡螺母使杠杆水平平衡,已
知OM=OA=5cm,则杠杆密度计的“0刻度”线应在 O (选填“O”或“A”)
点,将待测液体倒满小桶,在杠杆右端挂上重物并调节至 N点位置时,杠杆刚好水平平
衡。重物质量10g,AN=10cm,N点位置应标注的密度刻度值是 1.5 g/cm3,N点
往左标注,每隔1cm,密度变化 0. 1 g/cm3。
(2)改装后杠杆右端的密度刻度线 是 (选填“是”或“不是”)均匀分布的。要
使制作的杠杆密度计测量精度更高一些,小桶的容积应该 大 (选填“大”或
“小”)一些。【答案】(1)O;1.5;0.1;(2)是;大。
【解答】解:(1)小桶内没有液体时:根据杠杆平衡条件可知,当右侧挂上重物时杠
杆不可能在水平位置平衡,只有重物在O点时杠杆才能在水平位置平衡,故密度计的
“0刻度”在O点;
小桶内装入液体时:根据杠杆平衡条件可知,当杠杆处于水平平衡状态时,G液×L
OM
=
G物×L
ON
,
物体的重力:G物 =m物g=0.01kg×10N/kg=0.1N,
液体的体积V=20mL=20cm3=20×10﹣6m3,
L =OA+AN=5cm+10cm=15cm,
ON
小桶内所装液体的重力为G液 = 液gV,整理可得,N点位置应标注的密度刻度值:
ρ
液
= = =1.5×103kg/m3=1.5g/cm3;
ρN点往左1cm处,L
ON
′=ON﹣1cm=15cm﹣1cm=14cm,则此处应标注的密度刻度值:
液
′= = =1.4×103kg/m3=1.4g/cm3;
ρ
由于 Δ = 液 ﹣ 液 ′= ﹣ = ×(L ON ﹣L ON ′)=
×ΔL,
ρ ρ ρ
所以,每隔 1cm,密度变化量为 Δ = ×ΔL=
×1cm=0.1g/cm3。
ρ
(2)在
液
= 中,由于G物 、gV和L
OM
都是定值,故
液
与L
ON
成正比,故改
装后杠杆右端的密度刻度线是均匀分布的;
ρ ρ
在Δ = ×ΔL中,由于G物 、g和ΔL都是定值,故Δ 与V成反比,要使制作的
杠杆密度计测量精度更高一些,即每隔1cm密度变化量为Δ 更小些,则小桶的容积应
ρ ρ
该大一些。
ρ
故答案为:(1)O;1.5;0.1;(2)是;大。
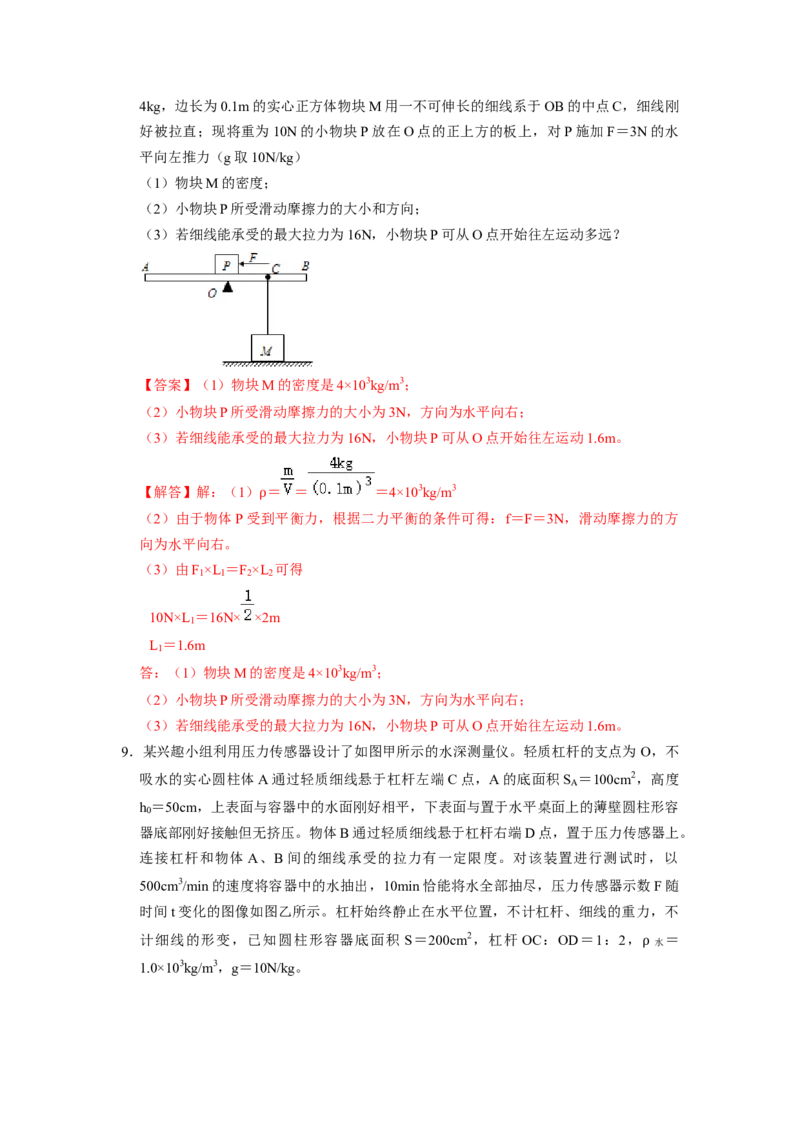
8.如图所示,用轻质薄木板AB做成杠杆,O为支点,OA=0B=2m,地面上一质量为4kg,边长为0.1m的实心正方体物块M用一不可伸长的细线系于OB的中点C,细线刚
好被拉直;现将重为10N的小物块P放在O点的正上方的板上,对P施加F=3N的水
平向左推力(g取10N/kg)
(1)物块M的密度;
(2)小物块P所受滑动摩擦力的大小和方向;
(3)若细线能承受的最大拉力为16N,小物块P可从O点开始往左运动多远?
【答案】(1)物块M的密度是4×103kg/m3;
(2)小物块P所受滑动摩擦力的大小为3N,方向为水平向右;
(3)若细线能承受的最大拉力为16N,小物块P可从O点开始往左运动1.6m。
【解答】解:(1) = = =4×103kg/m3
(2)由于物体P受到平衡力,根据二力平衡的条件可得:f=F=3N,滑动摩擦力的方
ρ
向为水平向右。
(3)由F ×L =F ×L 可得
1 1 2 2
10N×L =16N× ×2m
1
L =1.6m
1
答:(1)物块M的密度是4×103kg/m3;
(2)小物块P所受滑动摩擦力的大小为3N,方向为水平向右;
(3)若细线能承受的最大拉力为16N,小物块P可从O点开始往左运动1.6m。
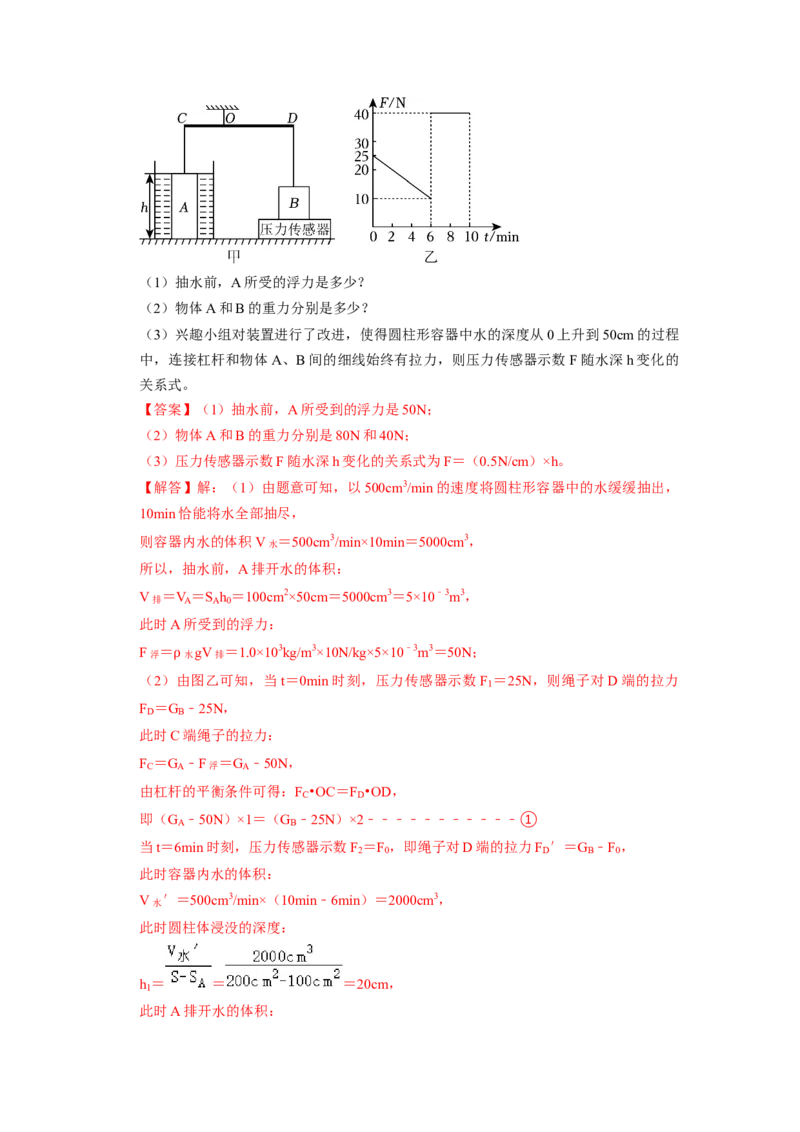
9.某兴趣小组利用压力传感器设计了如图甲所示的水深测量仪。轻质杠杆的支点为 O,不
吸水的实心圆柱体A通过轻质细线悬于杠杆左端C点,A的底面积S =100cm2,高度
A
h =50cm,上表面与容器中的水面刚好相平,下表面与置于水平桌面上的薄壁圆柱形容
0
器底部刚好接触但无挤压。物体B通过轻质细线悬于杠杆右端D点,置于压力传感器上。
连接杠杆和物体 A、B间的细线承受的拉力有一定限度。对该装置进行测试时,以
500cm3/min的速度将容器中的水抽出,10min恰能将水全部抽尽,压力传感器示数F随
时间t变化的图像如图乙所示。杠杆始终静止在水平位置,不计杠杆、细线的重力,不
计细线的形变,已知圆柱形容器底面积 S=200cm2,杠杆 OC:OD=1:2,
水
=
1.0×103kg/m3,g=10N/kg。
ρ(1)抽水前,A所受的浮力是多少?
(2)物体A和B的重力分别是多少?
(3)兴趣小组对装置进行了改进,使得圆柱形容器中水的深度从0上升到50cm的过程
中,连接杠杆和物体A、B间的细线始终有拉力,则压力传感器示数F随水深h变化的
关系式。
【答案】(1)抽水前,A所受到的浮力是50N;
(2)物体A和B的重力分别是80N和40N;
(3)压力传感器示数F随水深h变化的关系式为F=(0.5N/cm)×h。
【解答】解:(1)由题意可知,以500cm3/min的速度将圆柱形容器中的水缓缓抽出,
10min恰能将水全部抽尽,
则容器内水的体积V水 =500cm3/min×10min=5000cm3,
所以,抽水前,A排开水的体积:
V排 =V
A
=S
A
h
0
=100cm2×50cm=5000cm3=5×10﹣3m3,
此时A所受到的浮力:
F浮 = 水gV排 =1.0×103kg/m3×10N/kg×5×10﹣3m3=50N;
(2)
ρ
由图乙可知,当t=0min时刻,压力传感器示数F
1
=25N,则绳子对D端的拉力
F =G ﹣25N,
D B
此时C端绳子的拉力:
F
C
=G
A
﹣F浮 =G
A
﹣50N,
由杠杆的平衡条件可得:F •OC=F •OD,
C D
即(G ﹣50N)×1=(G ﹣25N)×2﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣①
A B
当t=6min时刻,压力传感器示数F =F ,即绳子对D端的拉力F ′=G ﹣F ,
2 0 D B 0
此时容器内水的体积:
V水 ′=500cm3/min×(10min﹣6min)=2000cm3,
此时圆柱体浸没的深度:
h = = =20cm,
1
此时A排开水的体积:V排 ′=S
A
h
1
=100cm2×20cm=2000cm3=2×10﹣3m3,
此时A所受到的浮力:
F浮 ′= 水gV排 ′=1.0×103kg/m3×10N/kg×2×10﹣3m3=20N,
此时C端绳子的拉力:
ρ
F
C
′=G
A
﹣F浮 ′=G
A
﹣20N,
由杠杆的平衡条件可得:F ′•OC=F ′•OD,
C D
即(G ﹣20N)×1=(G ﹣10N)×2﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣②
A B
由图乙可知,当t=6min以后,连接杠杆和圆柱体A的绳子断开,此时B对压力传感器
的压力为G ,
B
则G =40N﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣
B
﹣③
由①②③可得:G =80N,G =40N;
A B
(3)圆柱形容器中水的深度从0上升到50cm的过程中,连接杠杆和物体A、B间的细
线始终有拉力,
则细线可以承受A的重力,不会断开,
水深h时,圆柱体A受到的浮力F浮 = 水gV排 = 水gS
A
h,
此时绳子对C的拉力F
C
=G
A
﹣F浮 =G Aρ﹣ 水gS
A
hρ,
由杠杆的平衡条件可得:F
C
•OC=F
D
•OD,
ρ
则D端受到的拉力F
D
= F
C
= ×(G
A
﹣ 水gS
A
h),
ρ
传感器受到的压力 F=G
B
﹣F
D
=G
B
﹣ ×(G
A
﹣ 水gS
A
h)=40N﹣ ×(80N﹣
1.0×103kg/m3×10N/kg×100×10﹣4m2×h×10﹣2m)=(0.5Nρ/cm)×h,
即F与h成正比,且h=0cm时F=0N,h=50cm时F=(0.5N/cm)×50cm=25N;
答:(1)抽水前,A所受到的浮力是50N;
(2)物体A和B的重力分别是80N和40N;
(3)压力传感器示数F随水深h变化的关系式为F=(0.5N/cm)×h。
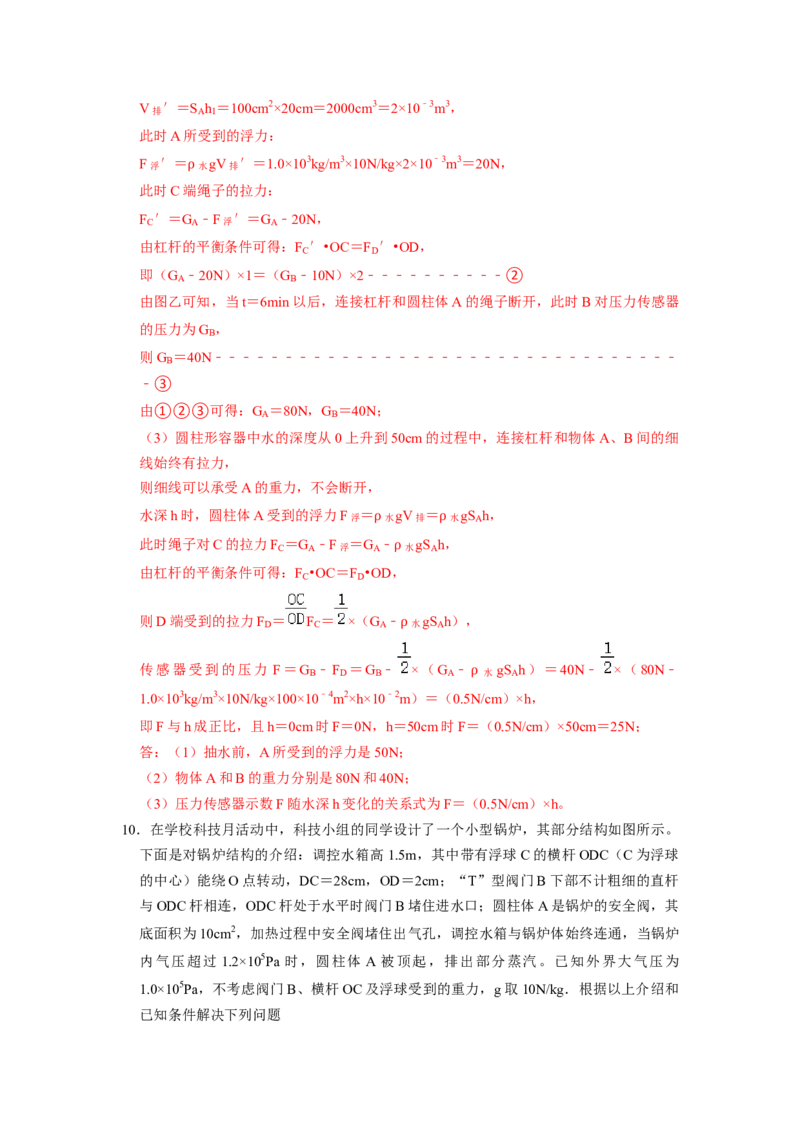
10.在学校科技月活动中,科技小组的同学设计了一个小型锅炉,其部分结构如图所示。
下面是对锅炉结构的介绍:调控水箱高 1.5m,其中带有浮球C的横杆ODC(C为浮球
的中心)能绕O点转动,DC=28cm,OD=2cm;“T”型阀门B下部不计粗细的直杆
与ODC杆相连,ODC杆处于水平时阀门B堵住进水口;圆柱体A是锅炉的安全阀,其
底面积为10cm2,加热过程中安全阀堵住出气孔,调控水箱与锅炉体始终连通,当锅炉
内气压超过 1.2×105Pa 时,圆柱体 A 被顶起,排出部分蒸汽。已知外界大气压为
1.0×105Pa,不考虑阀门B、横杆OC及浮球受到的重力,g取10N/kg.根据以上介绍和
已知条件解决下列问题(1)为保护锅炉安全,圆柱体A的重力不能超过多少;
(2)若“T”形阀门B受到向下的压力为30N,ODC杆处于水平平衡,此时浮球C浸
入水中体积是多少;
(3)按照这个设计,在锅炉加热后,将出现一些问题,请你通过计算说明。
【答案】见试题解答内容
【解答】解:(1)以圆柱体A为研究对象,A刚好被顶起时,G+F大气 =F气
由p= 得,F=pS,设圆柱体A的横截面积为S,
则mg+p S=pS
0
m= = =2.0kg,
所以G=mg=2.0kg×10N/kg=20N;
(2)“T”形阀门B受到向下的压力为30N,ODC杆处于水平平衡,根据杠杆的平衡
条件:
F•OD=F浮 •OC
F浮 = = =2N;
由F浮 = 液gV排 得,球浸入水中的体积:
ρ
V排 = = =2×10﹣4m3;
(3)由于加热过程中调控水箱与锅炉体始终是连通的,随着锅炉内温度的升高,锅炉
内水面上方气压升高,当气压升高到1.2×105Pa时,导致锅炉内水被压入调控水箱,由p
= 液gh得,使调控水箱表面的水比炉体内水高:
ρ
△h= = =2m,
使得阀门B不能打开,无法继续注水。
答:(1)为保护锅炉安全,圆柱体A的重力不能超过20N;
(2)若“T”形阀门B受到向下的压力为30N,ODC杆处于水平平衡,此时浮球C浸
入水中体积是2×10﹣4m3;(3)按照这个设计,在锅炉加热后,阀门B不能打开,无法继续注水。
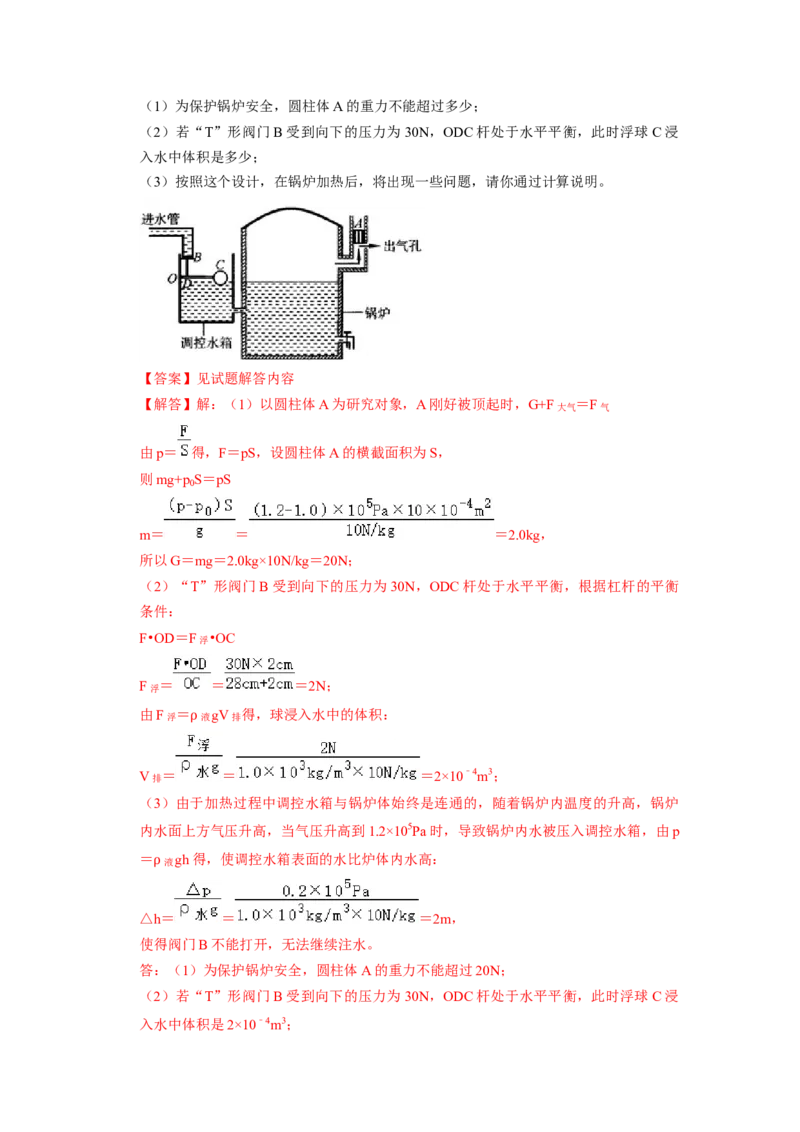
11.在研究杠杆的平衡条件得出结论后,小枫又设计了一套如图所示装置,图中所用的钩
码每一个质量都是50g。
(1)在如图示情况时,杠杆AB处于水平平衡状态,这时弹簧测力计的读数为2.80N.
设F 的力臂为L ,F 的力臂为L ,则 = ;
1 1 2 2
(2)若在杠杆左端钩码下方增加一个相同的钩码,如果保持杠杆右端所受拉力的大小
和作用点不变,要想将杠杆再次调节到水平,必须把弹簧测力计的下端向 右下 (填
“右下”或“左下”)方向移动。
(3)杠杆再次恢复水平后,弹簧测力计的拉力与对应力臂的乘积应是未增加钩码前力
和力臂乘积的 1.2 5 倍。
(4)若将弹簧测力计改挂在C点,请画出弹簧测力计读数最小时拉力的示意图。
【答案】见试题解答内容
【解答】解:(1)左边所挂钩码的重力G总 =m总g=4×0.05kg×10N/kg=2N;则F
2
=
2N;
由F L =F L 可得:
1 1 2 2
= = = ;
(2)杠杆左端的钩码下方增加一个钩码,阻力变大,阻力臂长度不变,动力作用点不
变,动力也不变,由F L =F L 可知:动力臂要变大,因此应向右移动。
1 1 2 2
(3)由图可知:阻力臂L =4格;由F L =F L =2N×4;
2 1 1 2 2
当左端增加一个钩码,则阻力 F ′=0.5N×5=2.5N,阻力臂不变,
2
由杠杆平衡条件得:
F ′L ′=F ′L =2.5N×4;
1 1 2 2
则两次动力和动力臂乘积比为 = =1.25。
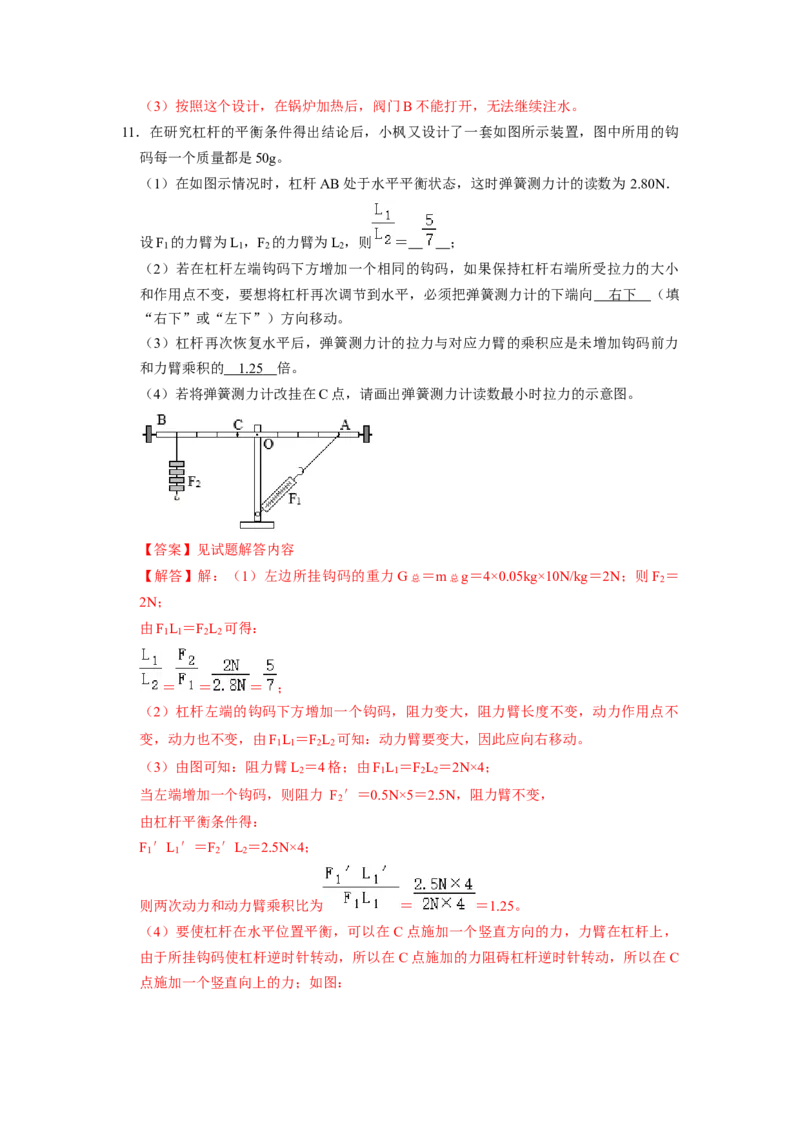
(4)要使杠杆在水平位置平衡,可以在 C点施加一个竖直方向的力,力臂在杠杆上,
由于所挂钩码使杠杆逆时针转动,所以在C点施加的力阻碍杠杆逆时针转动,所以在C
点施加一个竖直向上的力;如图:故答案为:(1) ;(2)右下;(3)1.25; (4)如上图。
三.探究杠杆的平衡条件(共3小题)
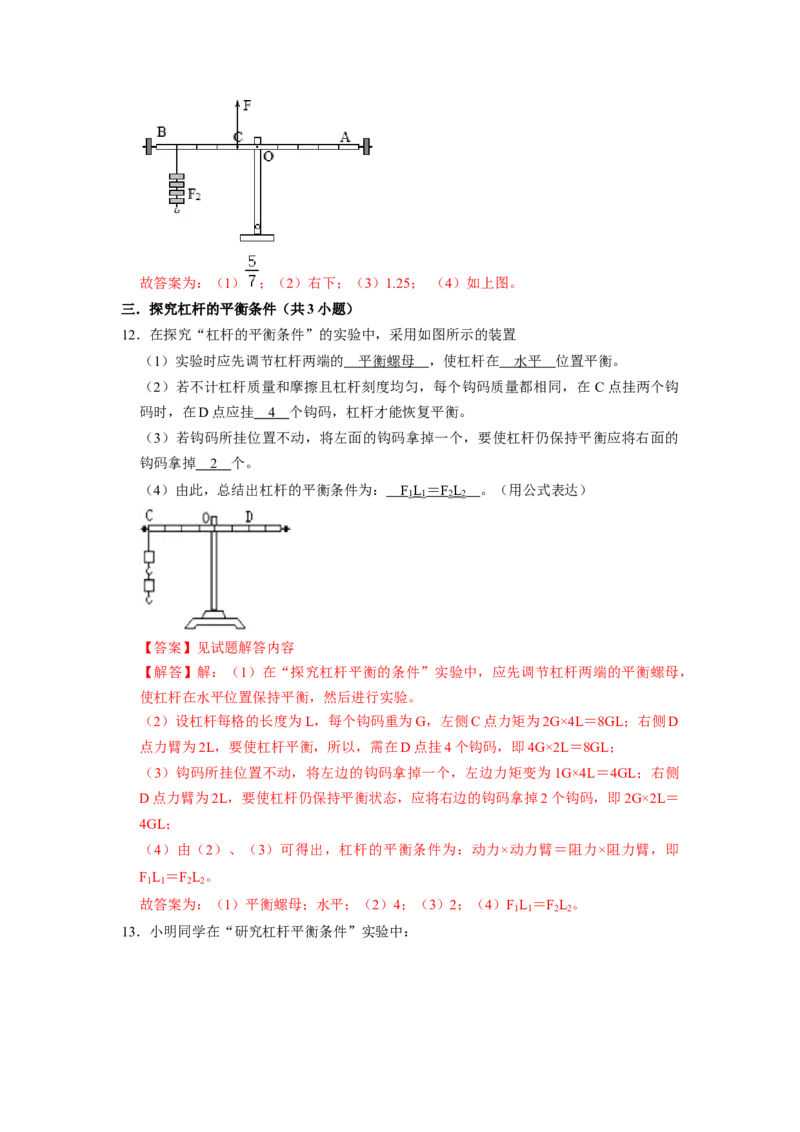
12.在探究“杠杆的平衡条件”的实验中,采用如图所示的装置
(1)实验时应先调节杠杆两端的 平衡螺母 ,使杠杆在 水平 位置平衡。
(2)若不计杠杆质量和摩擦且杠杆刻度均匀,每个钩码质量都相同,在 C点挂两个钩
码时,在D点应挂 4 个钩码,杠杆才能恢复平衡。
(3)若钩码所挂位置不动,将左面的钩码拿掉一个,要使杠杆仍保持平衡应将右面的
钩码拿掉 2 个。
(4)由此,总结出杠杆的平衡条件为: F L = F L 。(用公式表达)
1 1 2 2
【答案】见试题解答内容
【解答】解:(1)在“探究杠杆平衡的条件”实验中,应先调节杠杆两端的平衡螺母,
使杠杆在水平位置保持平衡,然后进行实验。
(2)设杠杆每格的长度为L,每个钩码重为G,左侧C点力矩为2G×4L=8GL;右侧D
点力臂为2L,要使杠杆平衡,所以,需在D点挂4个钩码,即4G×2L=8GL;
(3)钩码所挂位置不动,将左边的钩码拿掉一个,左边力矩变为1G×4L=4GL;右侧
D点力臂为2L,要使杠杆仍保持平衡状态,应将右边的钩码拿掉2个钩码,即2G×2L=
4GL;
(4)由(2)、(3)可得出,杠杆的平衡条件为:动力×动力臂=阻力×阻力臂,即
F L =F L 。
1 1 2 2
故答案为:(1)平衡螺母;水平;(2)4;(3)2;(4)F L =F L 。
1 1 2 2
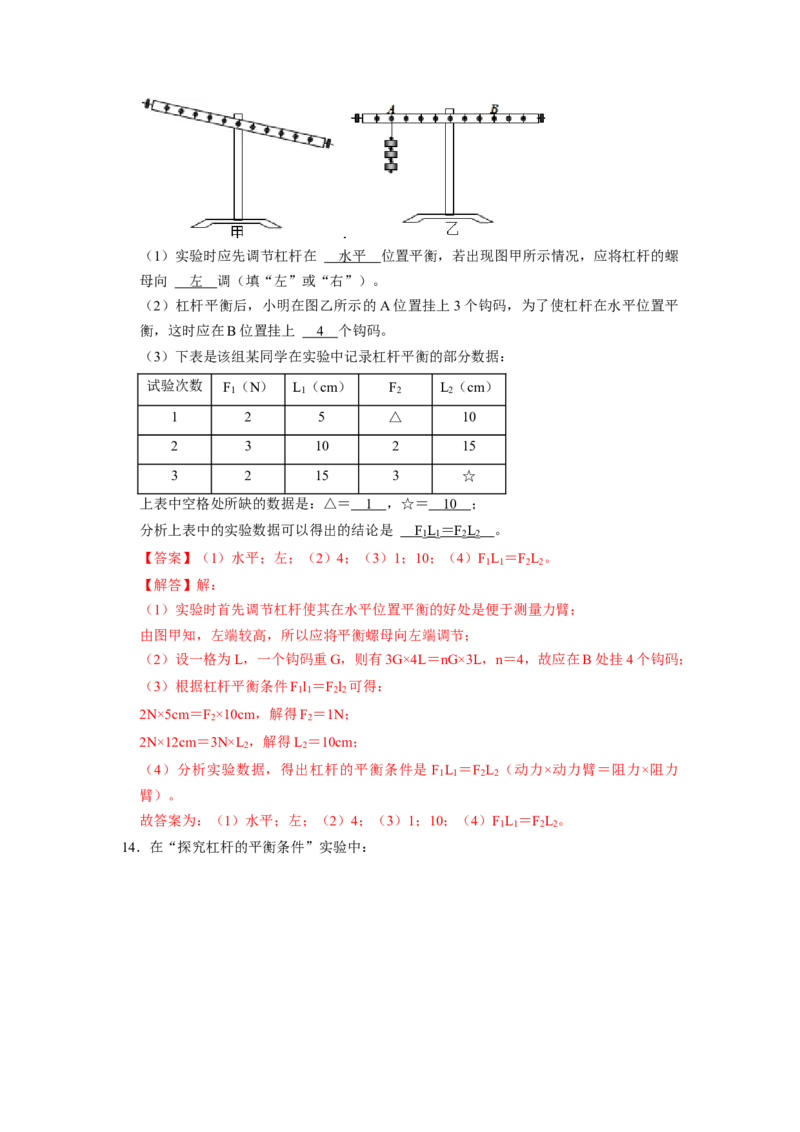
13.小明同学在“研究杠杆平衡条件”实验中:(1)实验时应先调节杠杆在 水平 位置平衡,若出现图甲所示情况,应将杠杆的螺
母向 左 调(填“左”或“右”)。
(2)杠杆平衡后,小明在图乙所示的A位置挂上3个钩码,为了使杠杆在水平位置平
衡,这时应在B位置挂上 4 个钩码。
(3)下表是该组某同学在实验中记录杠杆平衡的部分数据:
试验次数 F (N) L (cm) F L (cm)
1 1 2 2
1 2 5 △ 10
2 3 10 2 15
3 2 15 3 ☆
上表中空格处所缺的数据是:△= 1 ,☆= 1 0 ;
分析上表中的实验数据可以得出的结论是 F L = F L 。
1 1 2 2
【答案】(1)水平;左;(2)4;(3)1;10;(4)F L =F L 。
1 1 2 2
【解答】解:
(1)实验时首先调节杠杆使其在水平位置平衡的好处是便于测量力臂;
由图甲知,左端较高,所以应将平衡螺母向左端调节;
(2)设一格为L,一个钩码重G,则有3G×4L=nG×3L,n=4,故应在B处挂4个钩码;
(3)根据杠杆平衡条件F l =F l 可得:
11 22
2N×5cm=F ×10cm,解得F =1N;
2 2
2N×12cm=3N×L ,解得L =10cm;
2 2
(4)分析实验数据,得出杠杆的平衡条件是 F L =F L (动力×动力臂=阻力×阻力
1 1 2 2
臂)。
故答案为:(1)水平;左;(2)4;(3)1;10;(4)F L =F L 。
1 1 2 2
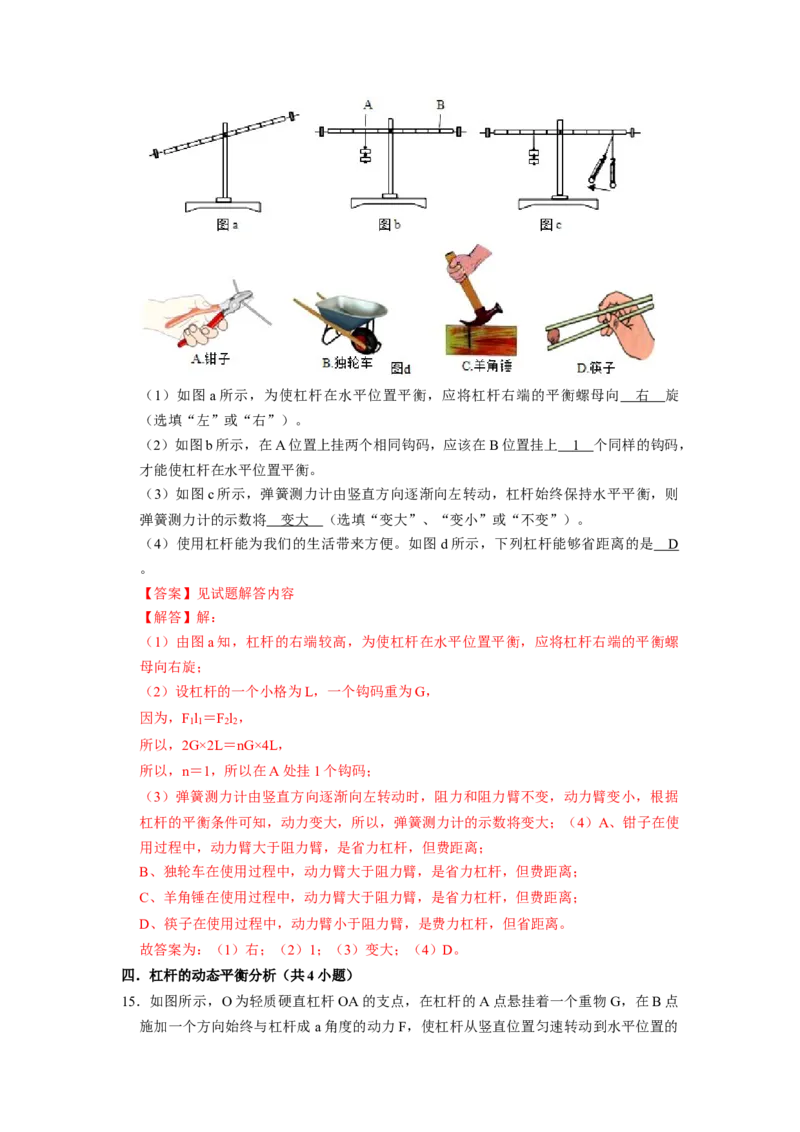
14.在“探究杠杆的平衡条件”实验中:(1)如图a所示,为使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向 右 旋
(选填“左”或“右”)。
(2)如图b所示,在A位置上挂两个相同钩码,应该在B位置挂上 1 个同样的钩码,
才能使杠杆在水平位置平衡。
(3)如图c所示,弹簧测力计由竖直方向逐渐向左转动,杠杆始终保持水平平衡,则
弹簧测力计的示数将 变大 (选填“变大”、“变小”或“不变”)。
(4)使用杠杆能为我们的生活带来方便。如图d所示,下列杠杆能够省距离的是 D
。
【答案】见试题解答内容
【解答】解:
(1)由图a知,杠杆的右端较高,为使杠杆在水平位置平衡,应将杠杆右端的平衡螺
母向右旋;
(2)设杠杆的一个小格为L,一个钩码重为G,
因为,F l =F l ,
11 22
所以,2G×2L=nG×4L,
所以,n=1,所以在A处挂1个钩码;
(3)弹簧测力计由竖直方向逐渐向左转动时,阻力和阻力臂不变,动力臂变小,根据
杠杆的平衡条件可知,动力变大,所以,弹簧测力计的示数将变大;(4)A、钳子在使
用过程中,动力臂大于阻力臂,是省力杠杆,但费距离;
B、独轮车在使用过程中,动力臂大于阻力臂,是省力杠杆,但费距离;
C、羊角锤在使用过程中,动力臂大于阻力臂,是省力杠杆,但费距离;
D、筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,但省距离。
故答案为:(1)右;(2)1;(3)变大;(4)D。
四.杠杆的动态平衡分析(共4小题)
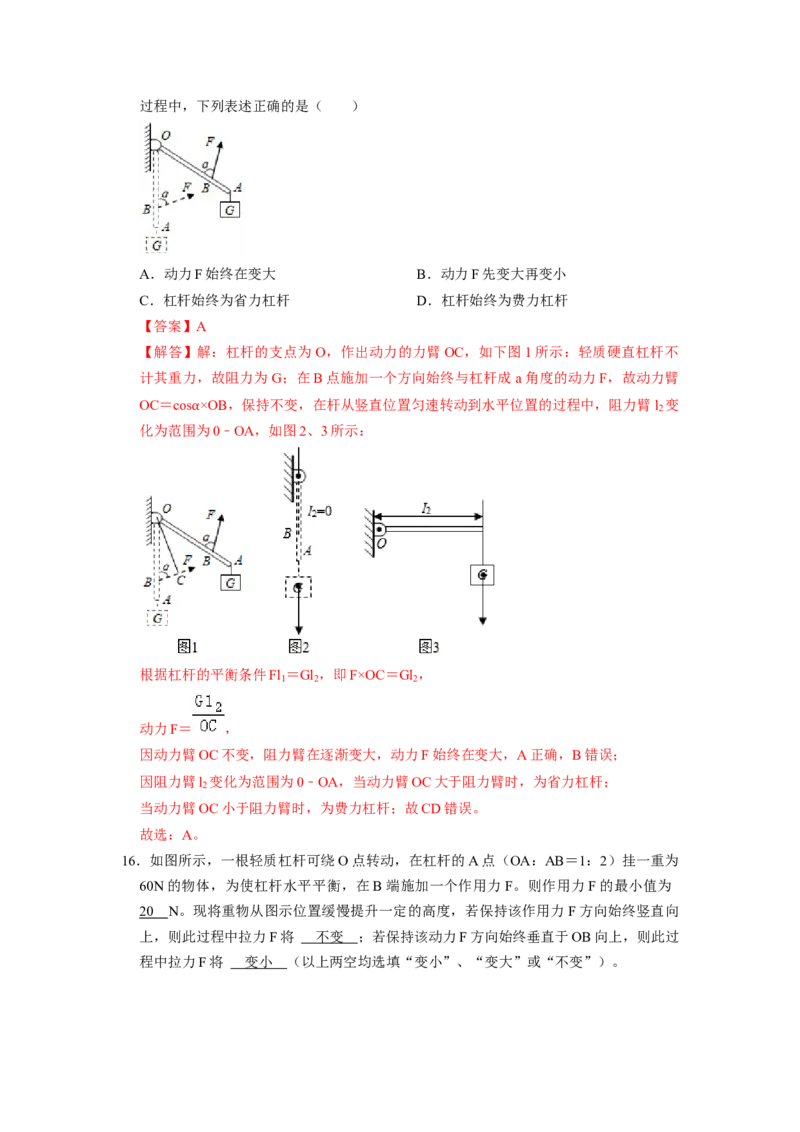
15.如图所示,O为轻质硬直杠杆OA的支点,在杠杆的A点悬挂着一个重物G,在B点
施加一个方向始终与杠杆成a角度的动力F,使杠杆从竖直位置匀速转动到水平位置的过程中,下列表述正确的是( )
A.动力F始终在变大 B.动力F先变大再变小
C.杠杆始终为省力杠杆 D.杠杆始终为费力杠杆
【答案】A
【解答】解:杠杆的支点为O,作出动力的力臂OC,如下图1所示:轻质硬直杠杆不
计其重力,故阻力为G;在B点施加一个方向始终与杠杆成a角度的动力F,故动力臂
OC=cos ×OB,保持不变,在杆从竖直位置匀速转动到水平位置的过程中,阻力臂l 变
2
化为范围为0﹣OA,如图2、3所示:
α
根据杠杆的平衡条件Fl =Gl ,即F×OC=Gl ,
1 2 2
动力F= ,
因动力臂OC不变,阻力臂在逐渐变大,动力F始终在变大,A正确,B错误;
因阻力臂l 变化为范围为0﹣OA,当动力臂OC大于阻力臂时,为省力杠杆;
2
当动力臂OC小于阻力臂时,为费力杠杆;故CD错误。
故选:A。
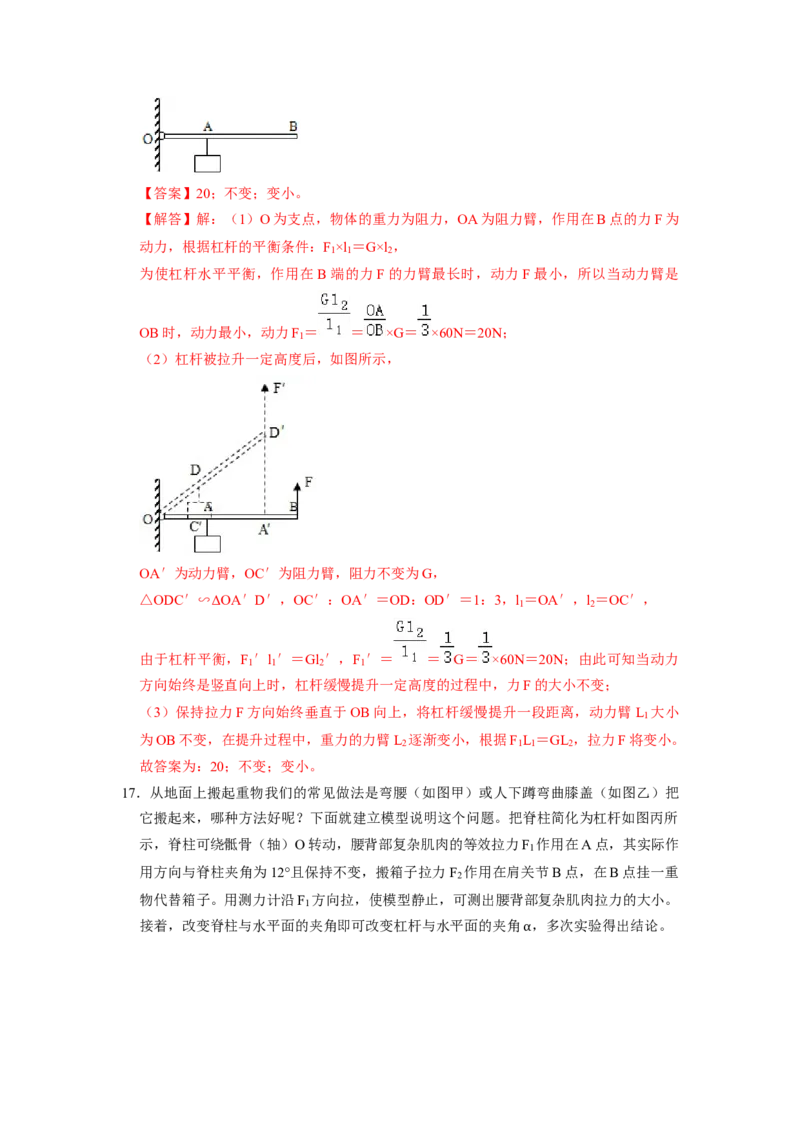
16.如图所示,一根轻质杠杆可绕O点转动,在杠杆的A点(OA:AB=1:2)挂一重为
60N的物体,为使杠杆水平平衡,在B端施加一个作用力F。则作用力F的最小值为
20 N。现将重物从图示位置缓慢提升一定的高度,若保持该作用力F方向始终竖直向
上,则此过程中拉力F将 不变 ;若保持该动力F方向始终垂直于OB向上,则此过
程中拉力F将 变小 (以上两空均选填“变小”、“变大”或“不变”)。【答案】20;不变;变小。
【解答】解:(1)O为支点,物体的重力为阻力,OA为阻力臂,作用在B点的力F为
动力,根据杠杆的平衡条件:F ×l =G×l ,
1 1 2
为使杠杆水平平衡,作用在B端的力F的力臂最长时,动力F最小,所以当动力臂是
OB时,动力最小,动力F = = ×G= ×60N=20N;
1
(2)杠杆被拉升一定高度后,如图所示,
OA′为动力臂,OC′为阻力臂,阻力不变为G,
△ODC′∽ΔOA′D′,OC′:OA′=OD:OD′=1:3,l =OA′,l =OC′,
1 2
由于杠杆平衡,F ′l ′=Gl ′,F ′= = G= ×60N=20N;由此可知当动力
1 1 2 1
方向始终是竖直向上时,杠杆缓慢提升一定高度的过程中,力F的大小不变;
(3)保持拉力F方向始终垂直于OB向上,将杠杆缓慢提升一段距离,动力臂L 大小
1
为OB不变,在提升过程中,重力的力臂L 逐渐变小,根据F L =GL ,拉力F将变小。
2 1 1 2
故答案为:20;不变;变小。
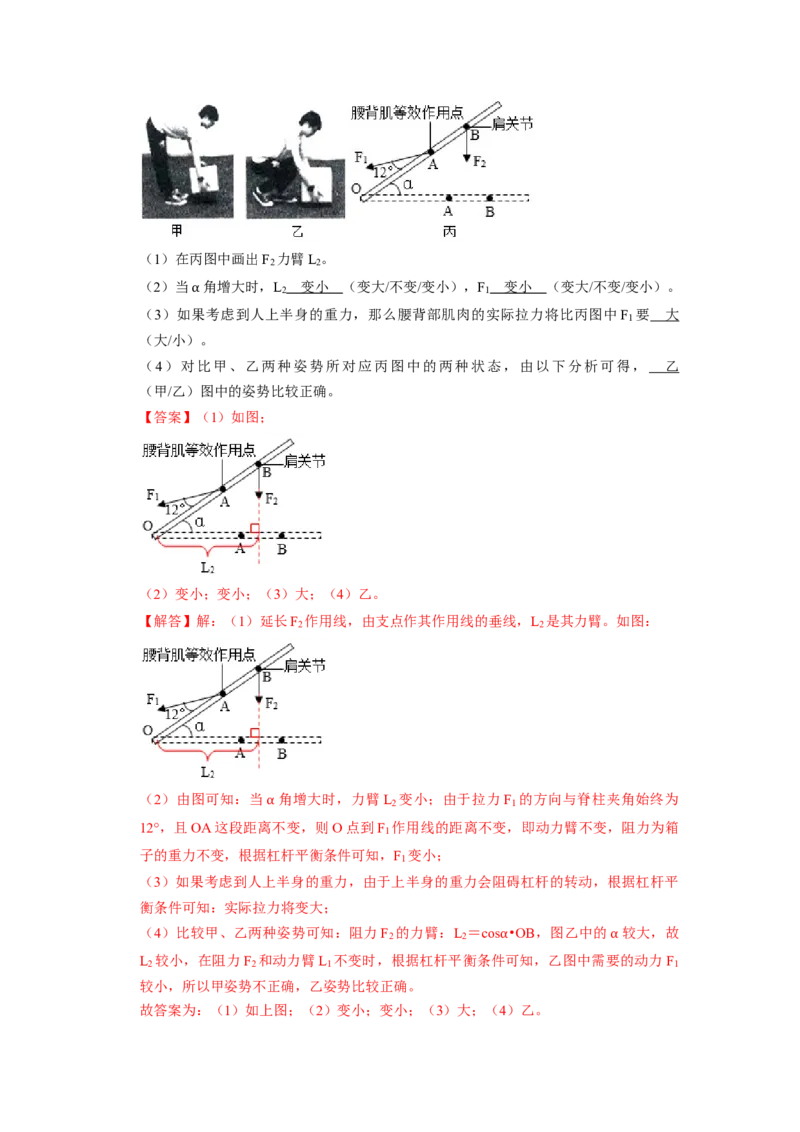
17.从地面上搬起重物我们的常见做法是弯腰(如图甲)或人下蹲弯曲膝盖(如图乙)把
它搬起来,哪种方法好呢?下面就建立模型说明这个问题。把脊柱简化为杠杆如图丙所
示,脊柱可绕骶骨(轴)O转动,腰背部复杂肌肉的等效拉力F 作用在A点,其实际作
1
用方向与脊柱夹角为12°且保持不变,搬箱子拉力F 作用在肩关节B点,在B点挂一重
2
物代替箱子。用测力计沿F 方向拉,使模型静止,可测出腰背部复杂肌肉拉力的大小。
1
接着,改变脊柱与水平面的夹角即可改变杠杆与水平面的夹角 ,多次实验得出结论。
α(1)在丙图中画出F 力臂L 。
2 2
(2)当 角增大时,L 变小 (变大/不变/变小),F 变小 (变大/不变/变小)。
2 1
(3)如果
α
考虑到人上半身的重力,那么腰背部肌肉的实际拉力将比丙图中F
1
要 大
(大/小)。
(4)对比甲、乙两种姿势所对应丙图中的两种状态,由以下分析可得, 乙
(甲/乙)图中的姿势比较正确。
【答案】(1)如图;
(2)变小;变小;(3)大;(4)乙。
【解答】解:(1)延长F 作用线,由支点作其作用线的垂线,L 是其力臂。如图:
2 2
(2)由图可知:当 角增大时,力臂L 变小;由于拉力F 的方向与脊柱夹角始终为
2 1
12°,且OA这段距离
α
不变,则O点到F
1
作用线的距离不变,即动力臂不变,阻力为箱
子的重力不变,根据杠杆平衡条件可知,F 变小;
1
(3)如果考虑到人上半身的重力,由于上半身的重力会阻碍杠杆的转动,根据杠杆平
衡条件可知:实际拉力将变大;
(4)比较甲、乙两种姿势可知:阻力F 的力臂:L =cos •OB,图乙中的 较大,故
2 2
L 2 较小,在阻力F 2 和动力臂L 1 不变时,根据杠杆平衡条件 α 可知,乙图中需要 α 的动力 F 1
较小,所以甲姿势不正确,乙姿势比较正确。
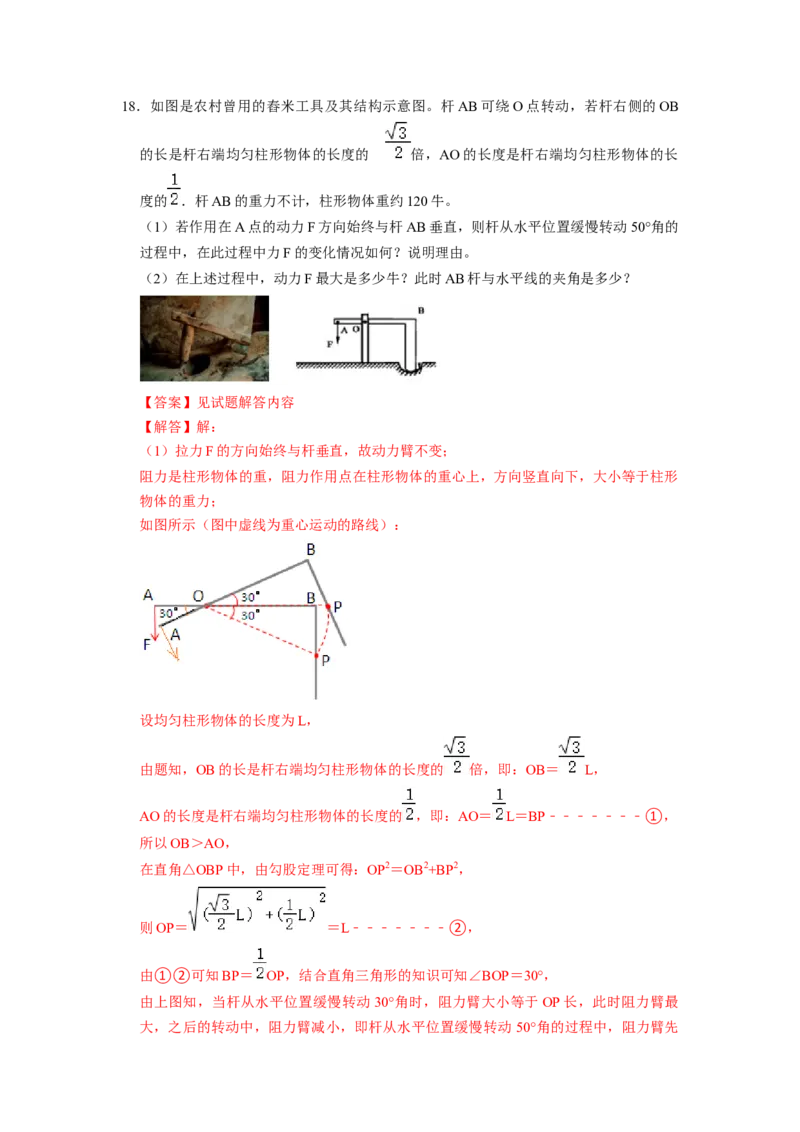
故答案为:(1)如上图;(2)变小;变小;(3)大;(4)乙。18.如图是农村曾用的舂米工具及其结构示意图。杆AB可绕O点转动,若杆右侧的OB
的长是杆右端均匀柱形物体的长度的 倍,AO的长度是杆右端均匀柱形物体的长
度的 .杆AB的重力不计,柱形物体重约120牛。
(1)若作用在A点的动力F方向始终与杆AB垂直,则杆从水平位置缓慢转动50°角的
过程中,在此过程中力F的变化情况如何?说明理由。
(2)在上述过程中,动力F最大是多少牛?此时AB杆与水平线的夹角是多少?
【答案】见试题解答内容
【解答】解:
(1)拉力F的方向始终与杆垂直,故动力臂不变;
阻力是柱形物体的重,阻力作用点在柱形物体的重心上,方向竖直向下,大小等于柱形
物体的重力;
如图所示(图中虚线为重心运动的路线):
设均匀柱形物体的长度为L,
由题知,OB的长是杆右端均匀柱形物体的长度的 倍,即:OB= L,
AO的长度是杆右端均匀柱形物体的长度的 ,即:AO= L=BP﹣﹣﹣﹣﹣﹣﹣①,
所以OB>AO,
在直角△OBP中,由勾股定理可得:OP2=OB2+BP2,
则OP= =L﹣﹣﹣﹣﹣﹣﹣②,
由①②可知BP= OP,结合直角三角形的知识可知∠BOP=30°,
由上图知,当杆从水平位置缓慢转动 30°角时,阻力臂大小等于OP长,此时阻力臂最
大,之后的转动中,阻力臂减小,即杆从水平位置缓慢转动 50°角的过程中,阻力臂先变大后变小;
而动力臂不变、阻力G不变,由杠杆平衡条件可知,动力F先增大后减小;
(2)由(1)可知杆转动30°角时,阻力臂达到最大,此时动力最大,
由杠杆的平衡条件有:F•OA=G•OP,
即:F× L=120N×L,
所以F=240N。
答:(1)杆从水平位置缓慢转动50°角的过程中,力F先变小后变大,因为动力臂和阻
力不变,阻力臂先增大后减小。
(2)在动力F最大是240N,此时AB杆与水平线的夹角是30°。
五.杠杆的平衡分析法及其应用(共7小题)
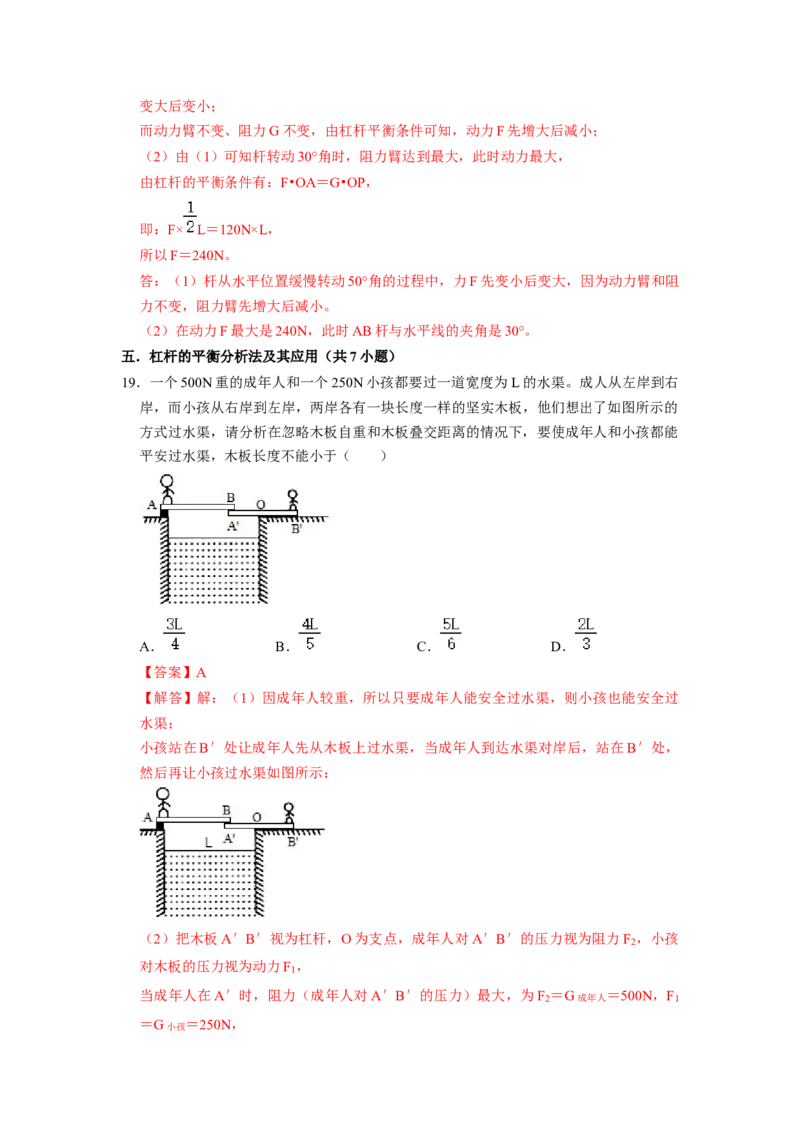
19.一个500N重的成年人和一个250N小孩都要过一道宽度为L的水渠。成人从左岸到右
岸,而小孩从右岸到左岸,两岸各有一块长度一样的坚实木板,他们想出了如图所示的
方式过水渠,请分析在忽略木板自重和木板叠交距离的情况下,要使成年人和小孩都能
平安过水渠,木板长度不能小于( )
A. B. C. D.
【答案】A
【解答】解:(1)因成年人较重,所以只要成年人能安全过水渠,则小孩也能安全过
水渠;
小孩站在B′处让成年人先从木板上过水渠,当成年人到达水渠对岸后,站在B′处,
然后再让小孩过水渠如图所示:
(2)把木板A′B′视为杠杆,O为支点,成年人对A′B′的压力视为阻力F ,小孩
2
对木板的压力视为动力F ,
1
当成年人在A′时,阻力(成年人对A′B′的压力)最大,为F
2
=G成年人 =500N,F
1
=G小孩 =250N,由图示可知,木板长度为AB,
由杠杆平衡条件可得:F ×(AB﹣L+AB)=F ×(L﹣AB),
1 2
250N×(2AB﹣L)=500N×(L﹣AB),
则AB= ,
因木板的长度不能小于 。
故选:A。
20.如图所示的杠杆,正处于水平平衡,若将杠杆左边的钩码向右移动一段距离L,为使
杠杆恢复平衡,应将右边钩码( )
A.向右移动L
B.向左移动L
C.向右移动大于L的距离
D.向左移动大于L的距离
【答案】D
【解答】解:设一个钩码的重为G,左边钩码到支点的距离为2l,
因为杠杆正处于水平平衡,
所以由杠杆平衡条件可得3G×2l=2G×l右 ,
解得l右 =3l,即右边钩码到支点的距离为3l;
若将杠杆左边的钩码向右移动一段距离L,则杠杆的左边=3G×(2l﹣L);
因为左边钩码向右移动,所以右边的钩码应该向左移动才能平衡,
设右边移动的距离为L′,则杠杆的右边=2G×(3l﹣L′);
为使杠杆恢复平衡,即3G×(2l﹣L)=2G×(3l﹣L′),
解得L′= L,即向左移动大于L的距离,故D正确。
故选:D。
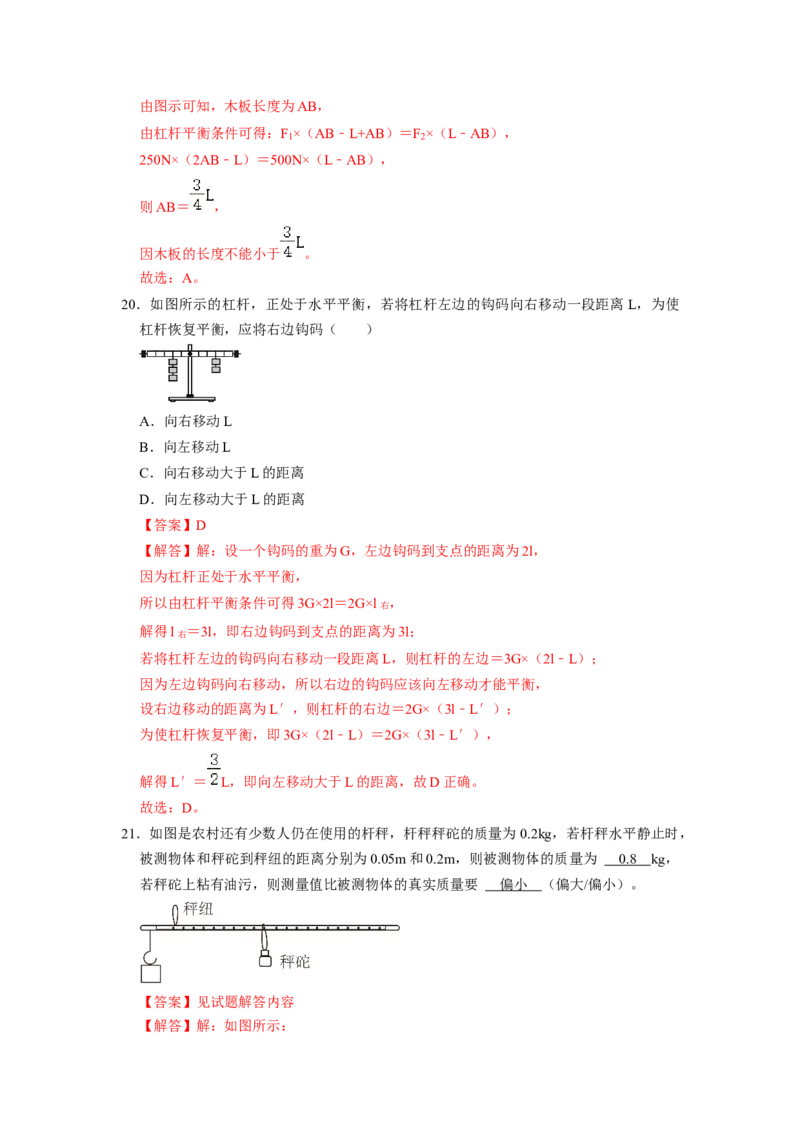
21.如图是农村还有少数人仍在使用的杆秤,杆秤秤砣的质量为0.2kg,若杆秤水平静止时,
被测物体和秤砣到秤纽的距离分别为0.05m和0.2m,则被测物体的质量为 0. 8 kg,
若秤砣上粘有油污,则测量值比被测物体的真实质量要 偏小 (偏大/偏小)。
【答案】见试题解答内容
【解答】解:如图所示:因为杠杆平衡,所以G L =G L ,
1 OA 2 OB
即:m gL =m gL ,
1 OA 2 OB
则m = = =0.8kg。
1
若秤砣有油污,m 增大,而G L 不变,所以L 要变小,
2 1 OA OB
杆秤所示的质量值要偏小。
故答案为:0.8;偏小。
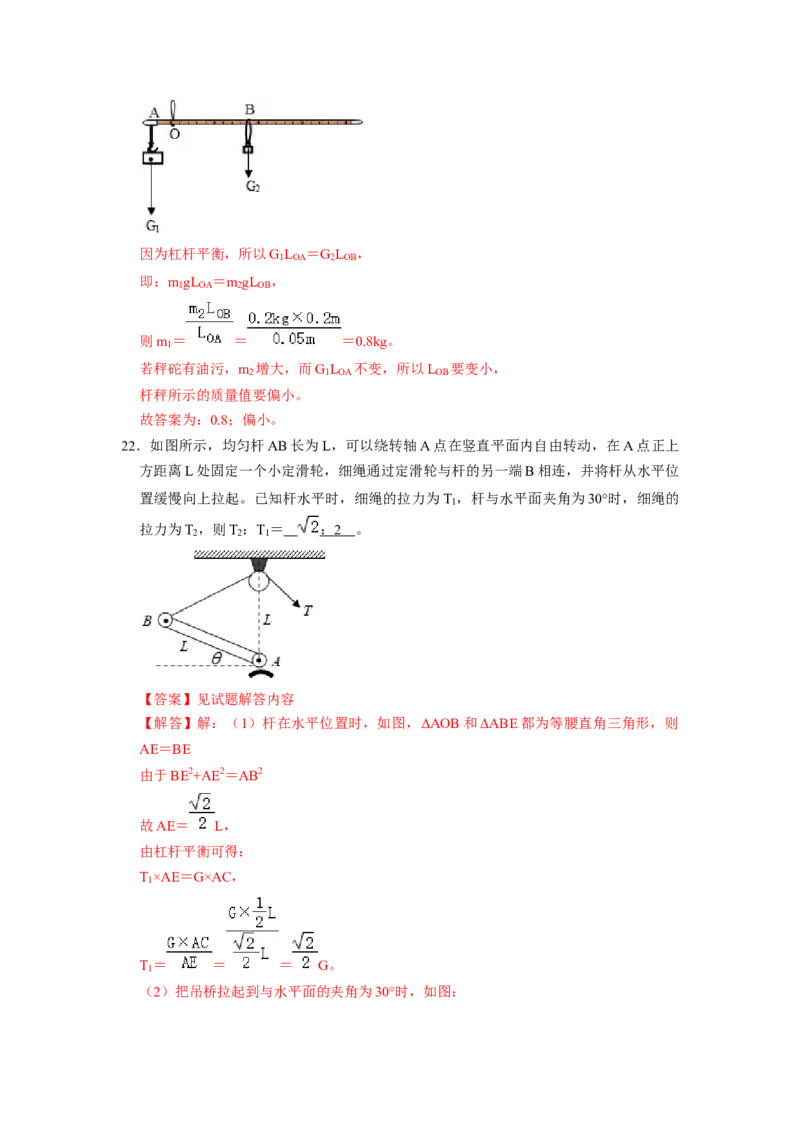
22.如图所示,均匀杆AB长为L,可以绕转轴A点在竖直平面内自由转动,在A点正上
方距离L处固定一个小定滑轮,细绳通过定滑轮与杆的另一端B相连,并将杆从水平位
置缓慢向上拉起。已知杆水平时,细绳的拉力为T ,杆与水平面夹角为30°时,细绳的
1
拉力为T ,则T :T = : 2 。
2 2 1
【答案】见试题解答内容
【解答】解:(1)杆在水平位置时,如图,ΔAOB和ΔABE都为等腰直角三角形,则
AE=BE
由于BE2+AE2=AB2
故AE= L,
由杠杆平衡可得:
T ×AE=G×AC,
1
T = = = G。
1
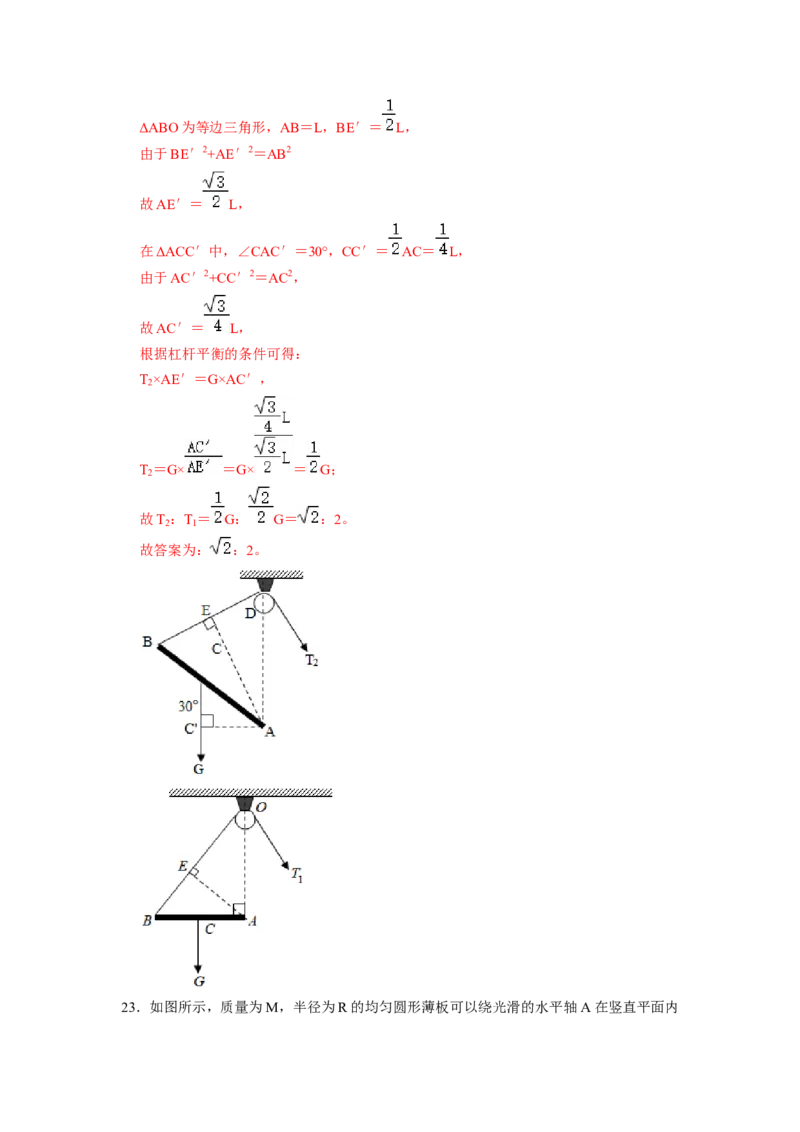
(2)把吊桥拉起到与水平面的夹角为30°时,如图:ΔABO为等边三角形,AB=L,BE′= L,
由于BE′2+AE′2=AB2
故AE′= L,
在ΔACC′中,∠CAC′=30°,CC′= AC= L,
由于AC′2+CC′2=AC2,
故AC′= L,
根据杠杆平衡的条件可得:
T ×AE′=G×AC′,
2
T =G× =G× = G;
2
故T :T = G: G= :2。
2 1
故答案为: :2。
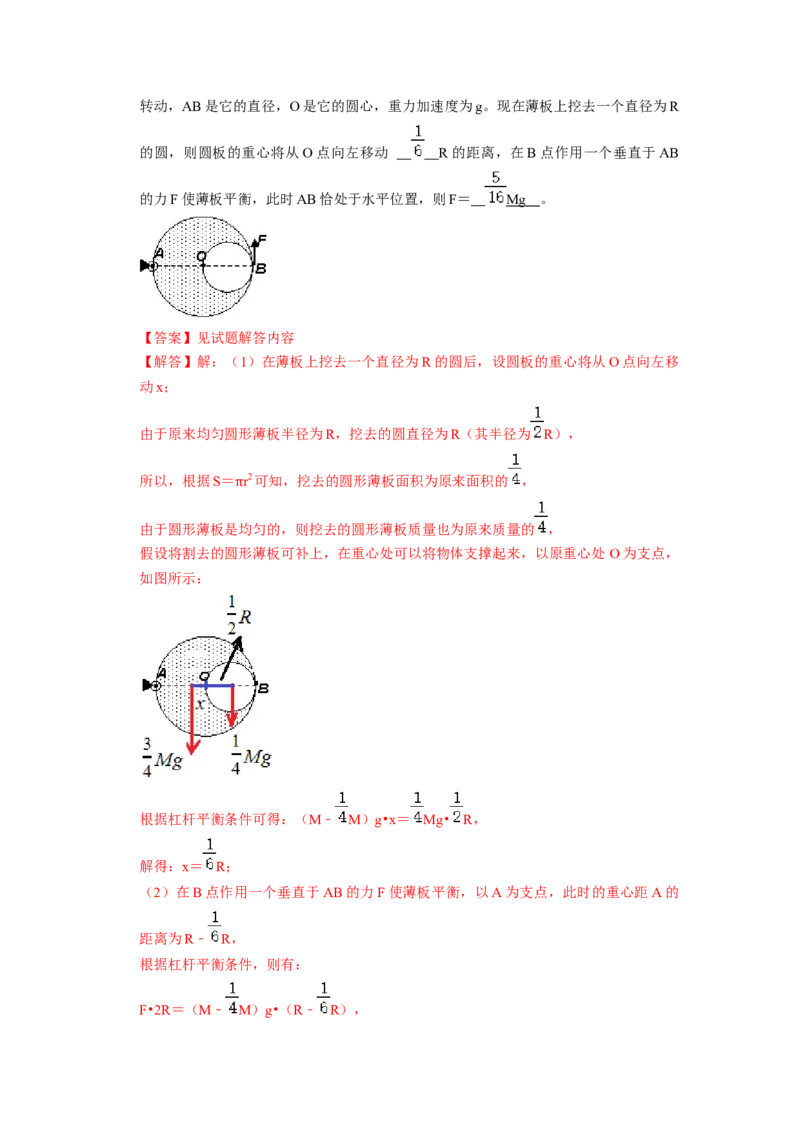
23.如图所示,质量为M,半径为R的均匀圆形薄板可以绕光滑的水平轴A在竖直平面内转动,AB是它的直径,O是它的圆心,重力加速度为g。现在薄板上挖去一个直径为R
的圆,则圆板的重心将从O点向左移动 R的距离,在B点作用一个垂直于AB
的力F使薄板平衡,此时AB恰处于水平位置,则F= Mg 。
【答案】见试题解答内容
【解答】解:(1)在薄板上挖去一个直径为R的圆后,设圆板的重心将从O点向左移
动x;
由于原来均匀圆形薄板半径为R,挖去的圆直径为R(其半径为 R),
所以,根据S= r2可知,挖去的圆形薄板面积为原来面积的 ,
π
由于圆形薄板是均匀的,则挖去的圆形薄板质量也为原来质量的 ,
假设将割去的圆形薄板可补上,在重心处可以将物体支撑起来,以原重心处 O为支点,
如图所示:
根据杠杆平衡条件可得:(M﹣ M)g•x= Mg• R,
解得:x= R;
(2)在B点作用一个垂直于AB的力F使薄板平衡,以A为支点,此时的重心距A的
距离为R﹣ R,
根据杠杆平衡条件,则有:
F•2R=(M﹣ M)g•(R﹣ R),解得:F= Mg。
故答案为: , Mg。
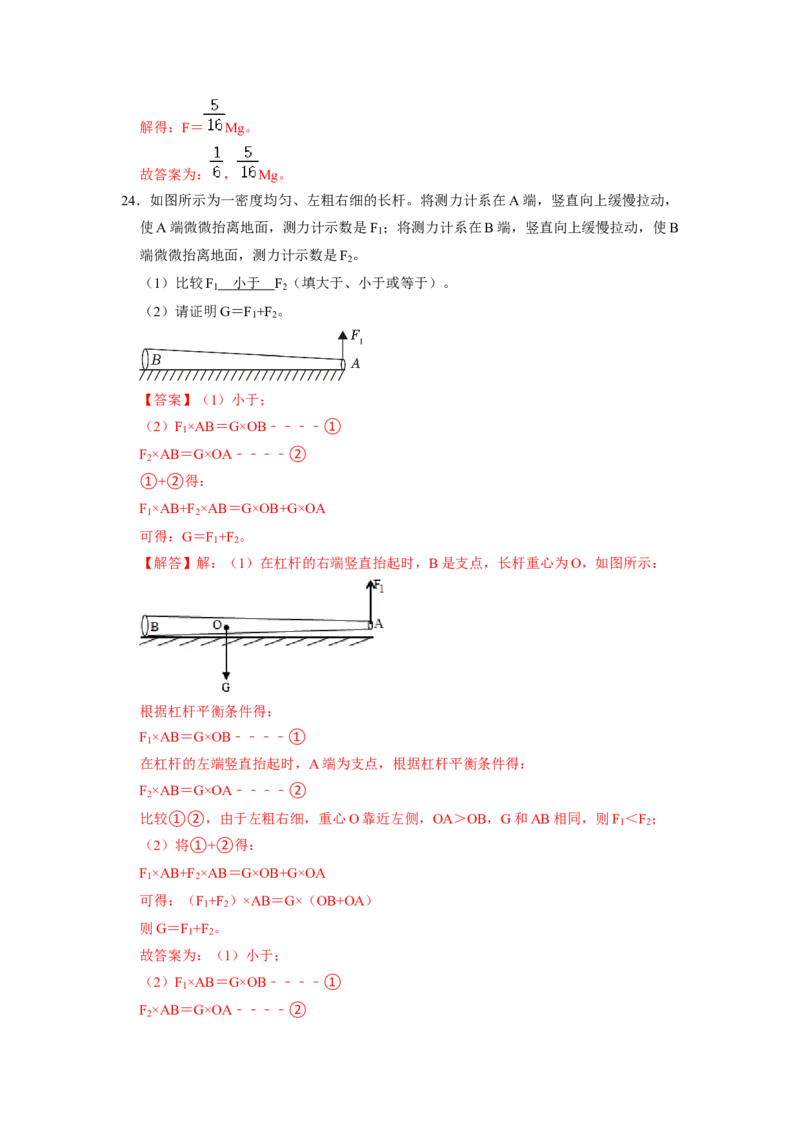
24.如图所示为一密度均匀、左粗右细的长杆。将测力计系在A端,竖直向上缓慢拉动,
使A端微微抬离地面,测力计示数是F ;将测力计系在B端,竖直向上缓慢拉动,使B
1
端微微抬离地面,测力计示数是F 。
2
(1)比较F 小于 F (填大于、小于或等于)。
1 2
(2)请证明G=F +F 。
1 2
【答案】(1)小于;
(2)F ×AB=G×OB﹣﹣﹣﹣①
1
F ×AB=G×OA﹣﹣﹣﹣②
2
①+②得:
F ×AB+F ×AB=G×OB+G×OA
1 2
可得:G=F +F 。
1 2
【解答】解:(1)在杠杆的右端竖直抬起时,B是支点,长杆重心为O,如图所示:
根据杠杆平衡条件得:
F ×AB=G×OB﹣﹣﹣﹣①
1
在杠杆的左端竖直抬起时,A端为支点,根据杠杆平衡条件得:
F ×AB=G×OA﹣﹣﹣﹣②
2
比较①②,由于左粗右细,重心O靠近左侧,OA>OB,G和AB相同,则F <F ;
1 2
(2)将①+②得:
F ×AB+F ×AB=G×OB+G×OA
1 2
可得:(F +F )×AB=G×(OB+OA)
1 2
则G=F +F 。
1 2
故答案为:(1)小于;
(2)F ×AB=G×OB﹣﹣﹣﹣①
1
F ×AB=G×OA﹣﹣﹣﹣②
2①+②得:
F ×AB+F ×AB=G×OB+G×OA
1 2
可得:G=F +F 。
1 2
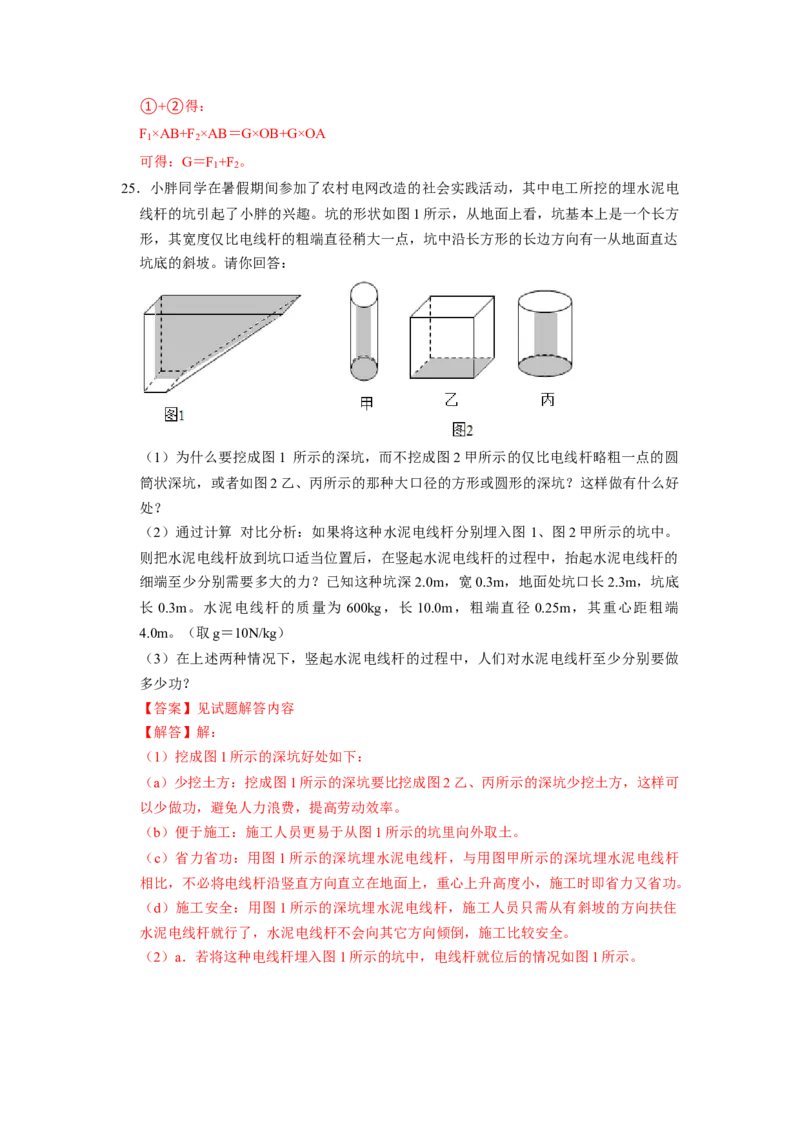
25.小胖同学在暑假期间参加了农村电网改造的社会实践活动,其中电工所挖的埋水泥电
线杆的坑引起了小胖的兴趣。坑的形状如图1所示,从地面上看,坑基本上是一个长方
形,其宽度仅比电线杆的粗端直径稍大一点,坑中沿长方形的长边方向有一从地面直达
坑底的斜坡。请你回答:
(1)为什么要挖成图1 所示的深坑,而不挖成图2甲所示的仅比电线杆略粗一点的圆
筒状深坑,或者如图2乙、丙所示的那种大口径的方形或圆形的深坑?这样做有什么好
处?
(2)通过计算 对比分析:如果将这种水泥电线杆分别埋入图 1、图2甲所示的坑中。
则把水泥电线杆放到坑口适当位置后,在竖起水泥电线杆的过程中,抬起水泥电线杆的
细端至少分别需要多大的力?已知这种坑深2.0m,宽0.3m,地面处坑口长2.3m,坑底
长 0.3m。水泥电线杆的质量为 600kg,长 10.0m,粗端直径 0.25m,其重心距粗端
4.0m。(取g=10N/kg)
(3)在上述两种情况下,竖起水泥电线杆的过程中,人们对水泥电线杆至少分别要做
多少功?
【答案】见试题解答内容
【解答】解:
(1)挖成图1所示的深坑好处如下:
(a)少挖土方:挖成图1所示的深坑要比挖成图2乙、丙所示的深坑少挖土方,这样可
以少做功,避免人力浪费,提高劳动效率。
(b)便于施工:施工人员更易于从图1所示的坑里向外取土。
(c)省力省功:用图1所示的深坑埋水泥电线杆,与用图甲所示的深坑埋水泥电线杆
相比,不必将电线杆沿竖直方向直立在地面上,重心上升高度小,施工时即省力又省功。
(d)施工安全:用图1所示的深坑埋水泥电线杆,施工人员只需从有斜坡的方向扶住
水泥电线杆就行了,水泥电线杆不会向其它方向倾倒,施工比较安全。
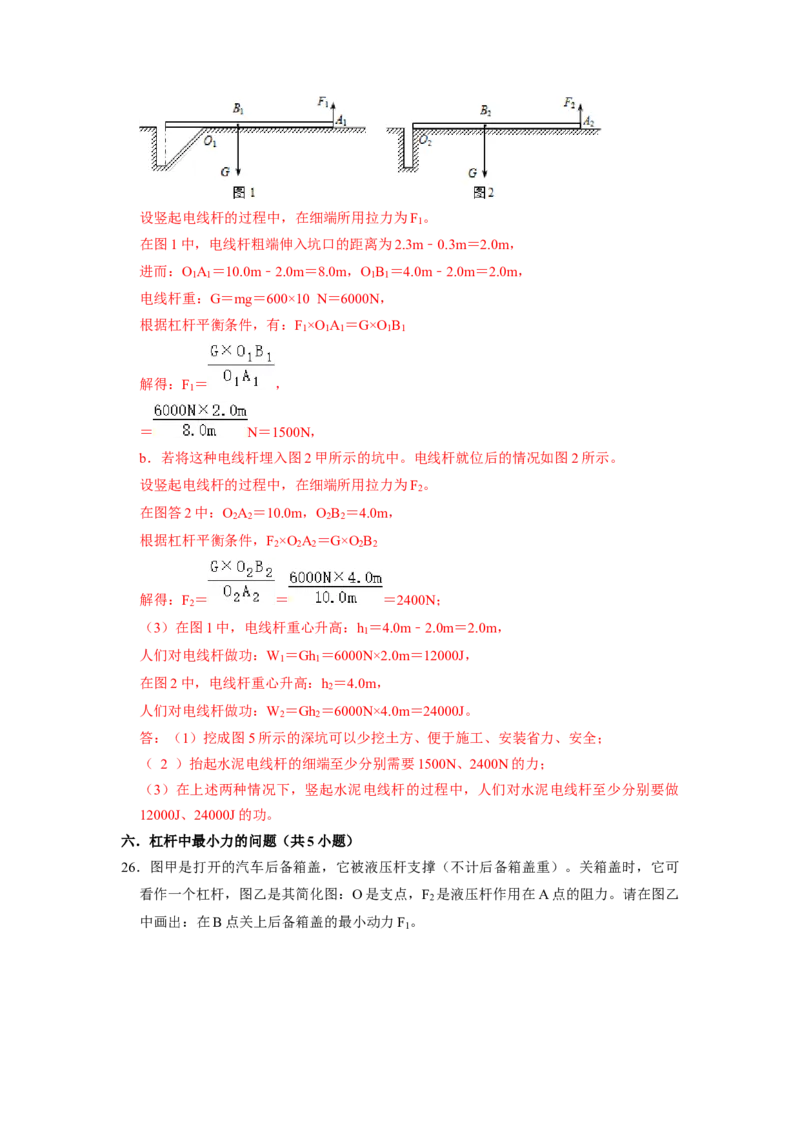
(2)a.若将这种电线杆埋入图1所示的坑中,电线杆就位后的情况如图1所示。设竖起电线杆的过程中,在细端所用拉力为F 。
1
在图1中,电线杆粗端伸入坑口的距离为2.3m﹣0.3m=2.0m,
进而:O A =10.0m﹣2.0m=8.0m,O B =4.0m﹣2.0m=2.0m,
1 1 1 1
电线杆重:G=mg=600×10 N=6000N,
根据杠杆平衡条件,有:F ×O A =G×O B
1 1 1 1 1
解得:F = ,
1
= N=1500N,
b.若将这种电线杆埋入图2甲所示的坑中。电线杆就位后的情况如图2所示。
设竖起电线杆的过程中,在细端所用拉力为F 。
2
在图答2中:O A =10.0m,O B =4.0m,
2 2 2 2
根据杠杆平衡条件,F ×O A =G×O B
2 2 2 2 2
解得:F = = =2400N;
2
(3)在图1中,电线杆重心升高:h =4.0m﹣2.0m=2.0m,
1
人们对电线杆做功:W =Gh =6000N×2.0m=12000J,
1 1
在图2中,电线杆重心升高:h =4.0m,
2
人们对电线杆做功:W =Gh =6000N×4.0m=24000J。
2 2
答:(1)挖成图5所示的深坑可以少挖土方、便于施工、安装省力、安全;
( 2 )抬起水泥电线杆的细端至少分别需要1500N、2400N的力;
(3)在上述两种情况下,竖起水泥电线杆的过程中,人们对水泥电线杆至少分别要做
12000J、24000J的功。
六.杠杆中最小力的问题(共5小题)
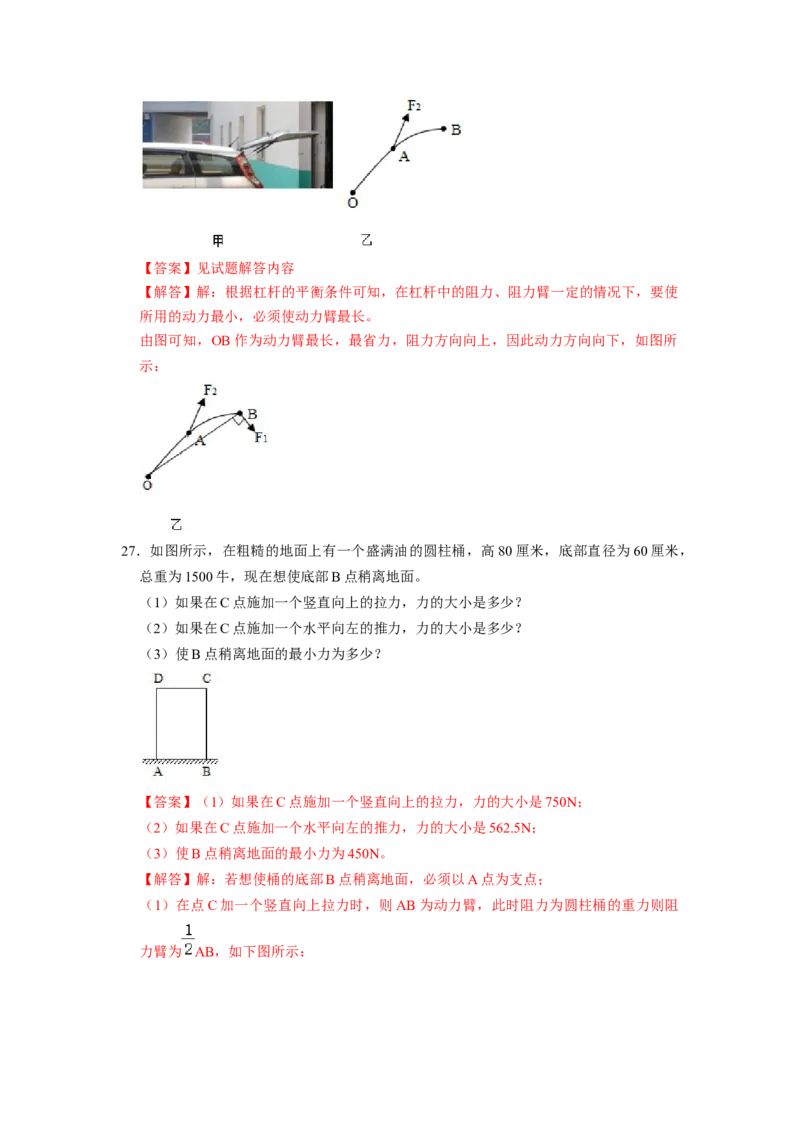
26.图甲是打开的汽车后备箱盖,它被液压杆支撑(不计后备箱盖重)。关箱盖时,它可
看作一个杠杆,图乙是其简化图:O是支点,F 是液压杆作用在A点的阻力。请在图乙
2
中画出:在B点关上后备箱盖的最小动力F 。
1【答案】见试题解答内容
【解答】解:根据杠杆的平衡条件可知,在杠杆中的阻力、阻力臂一定的情况下,要使
所用的动力最小,必须使动力臂最长。
由图可知,OB作为动力臂最长,最省力,阻力方向向上,因此动力方向向下,如图所
示:
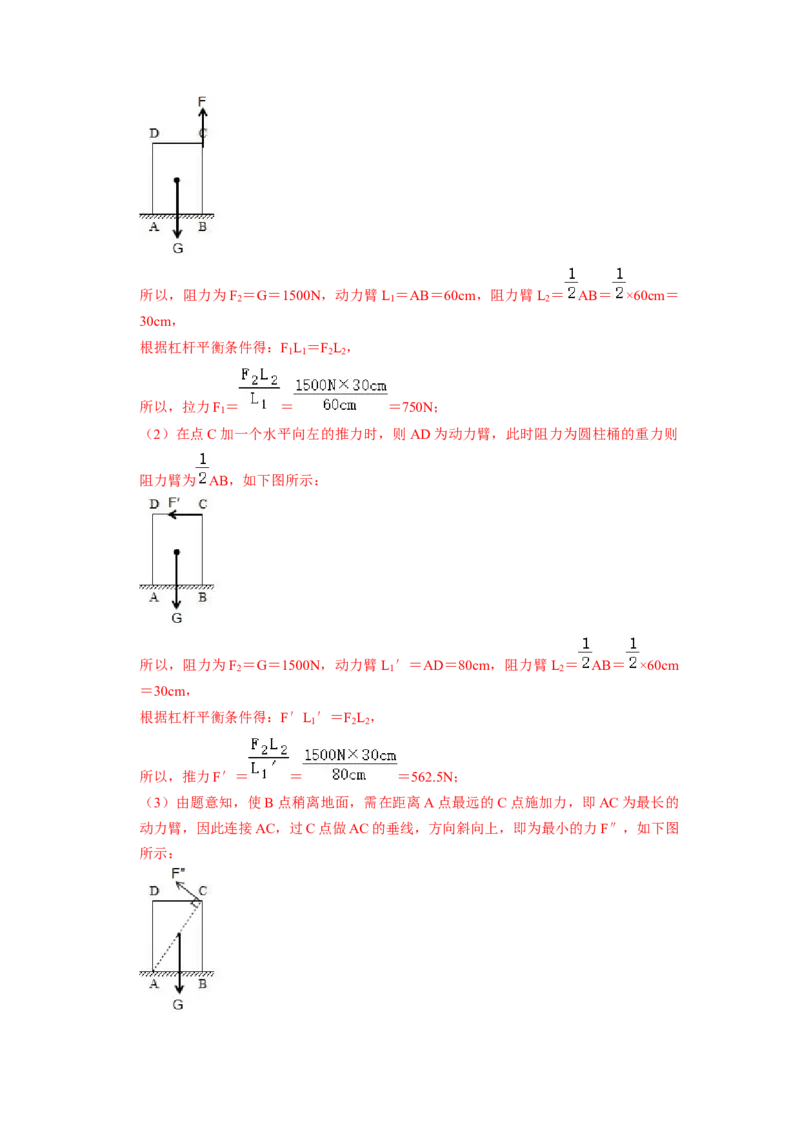
27.如图所示,在粗糙的地面上有一个盛满油的圆柱桶,高80厘米,底部直径为60厘米,
总重为1500牛,现在想使底部B点稍离地面。
(1)如果在C点施加一个竖直向上的拉力,力的大小是多少?
(2)如果在C点施加一个水平向左的推力,力的大小是多少?
(3)使B点稍离地面的最小力为多少?
【答案】(1)如果在C点施加一个竖直向上的拉力,力的大小是750N;
(2)如果在C点施加一个水平向左的推力,力的大小是562.5N;
(3)使B点稍离地面的最小力为450N。
【解答】解:若想使桶的底部B点稍离地面,必须以A点为支点;
(1)在点C加一个竖直向上拉力时,则AB为动力臂,此时阻力为圆柱桶的重力则阻
力臂为 AB,如下图所示:所以,阻力为F =G=1500N,动力臂L =AB=60cm,阻力臂L = AB= ×60cm=
2 1 2
30cm,
根据杠杆平衡条件得:F L =F L ,
1 1 2 2
所以,拉力F = = =750N;
1
(2)在点C加一个水平向左的推力时,则AD为动力臂,此时阻力为圆柱桶的重力则
阻力臂为 AB,如下图所示:
所以,阻力为F =G=1500N,动力臂L ′=AD=80cm,阻力臂L = AB= ×60cm
2 1 2
=30cm,
根据杠杆平衡条件得:F′L ′=F L ,
1 2 2
所以,推力F′= = =562.5N;
(3)由题意知,使B点稍离地面,需在距离A点最远的C点施加力,即AC为最长的
动力臂,因此连接AC,过C点做AC的垂线,方向斜向上,即为最小的力F″,如下图
所示:所 以 , 阻 力 为 F = G = 1500N , 动 力 臂 L ″ = AC = =
2 1
=100cm,阻力臂L = AB= ×60cm=30cm,
2
根据杠杆平衡条件得:F″L ″=F L ,
1 2 2
所以,推力F″= = =450N。
答:(1)如果在C点施加一个竖直向上的拉力,力的大小是750N;
(2)如果在C点施加一个水平向左的推力,力的大小是562.5N;
(3)使B点稍离地面的最小力为450N。
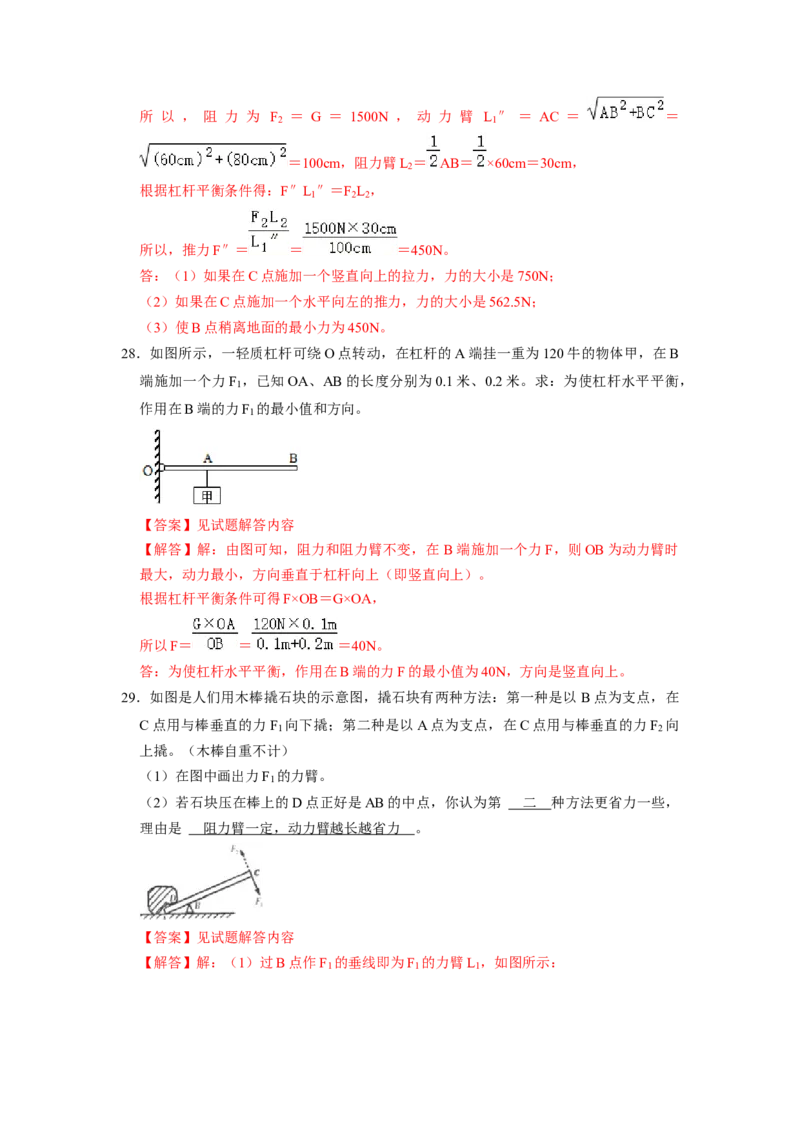
28.如图所示,一轻质杠杆可绕O点转动,在杠杆的A端挂一重为120牛的物体甲,在B
端施加一个力F ,已知OA、AB的长度分别为0.1米、0.2米。求:为使杠杆水平平衡,
1
作用在B端的力F 的最小值和方向。
1
【答案】见试题解答内容
【解答】解:由图可知,阻力和阻力臂不变,在 B端施加一个力F,则OB为动力臂时
最大,动力最小,方向垂直于杠杆向上(即竖直向上)。
根据杠杆平衡条件可得F×OB=G×OA,
所以F= = =40N。
答:为使杠杆水平平衡,作用在B端的力F的最小值为40N,方向是竖直向上。
29.如图是人们用木棒撬石块的示意图,撬石块有两种方法:第一种是以 B点为支点,在
C点用与棒垂直的力F 向下撬;第二种是以A点为支点,在C点用与棒垂直的力F 向
1 2
上撬。(木棒自重不计)
(1)在图中画出力F 的力臂。
1
(2)若石块压在棒上的D点正好是AB的中点,你认为第 二 种方法更省力一些,
理由是 阻力臂一定,动力臂越长越省力 。
【答案】见试题解答内容
【解答】解:(1)过B点作F 的垂线即为F 的力臂L ,如图所示:
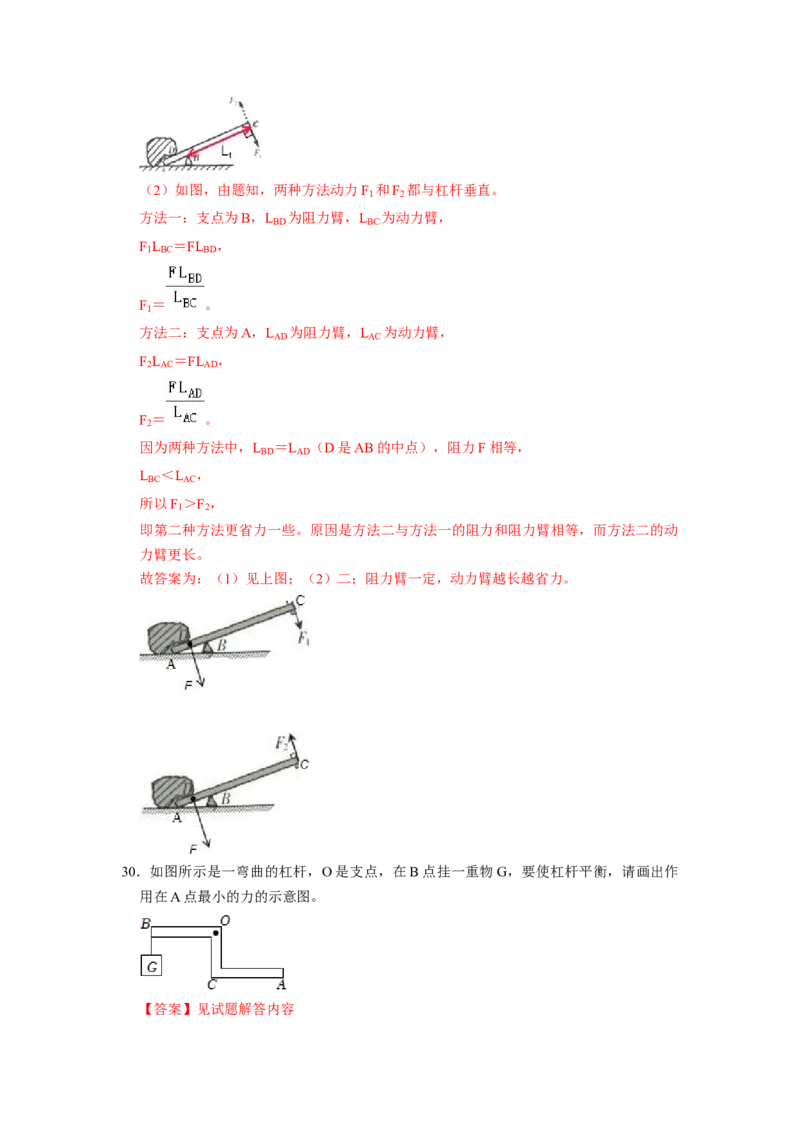
1 1 1(2)如图,由题知,两种方法动力F 和F 都与杠杆垂直。
1 2
方法一:支点为B,L 为阻力臂,L 为动力臂,
BD BC
F L =FL ,
1 BC BD
F = 。
1
方法二:支点为A,L 为阻力臂,L 为动力臂,
AD AC
F L =FL ,
2 AC AD
F = 。
2
因为两种方法中,L =L (D是AB的中点),阻力F相等,
BD AD
L <L ,
BC AC
所以F >F ,
1 2
即第二种方法更省力一些。原因是方法二与方法一的阻力和阻力臂相等,而方法二的动
力臂更长。
故答案为:(1)见上图;(2)二;阻力臂一定,动力臂越长越省力。
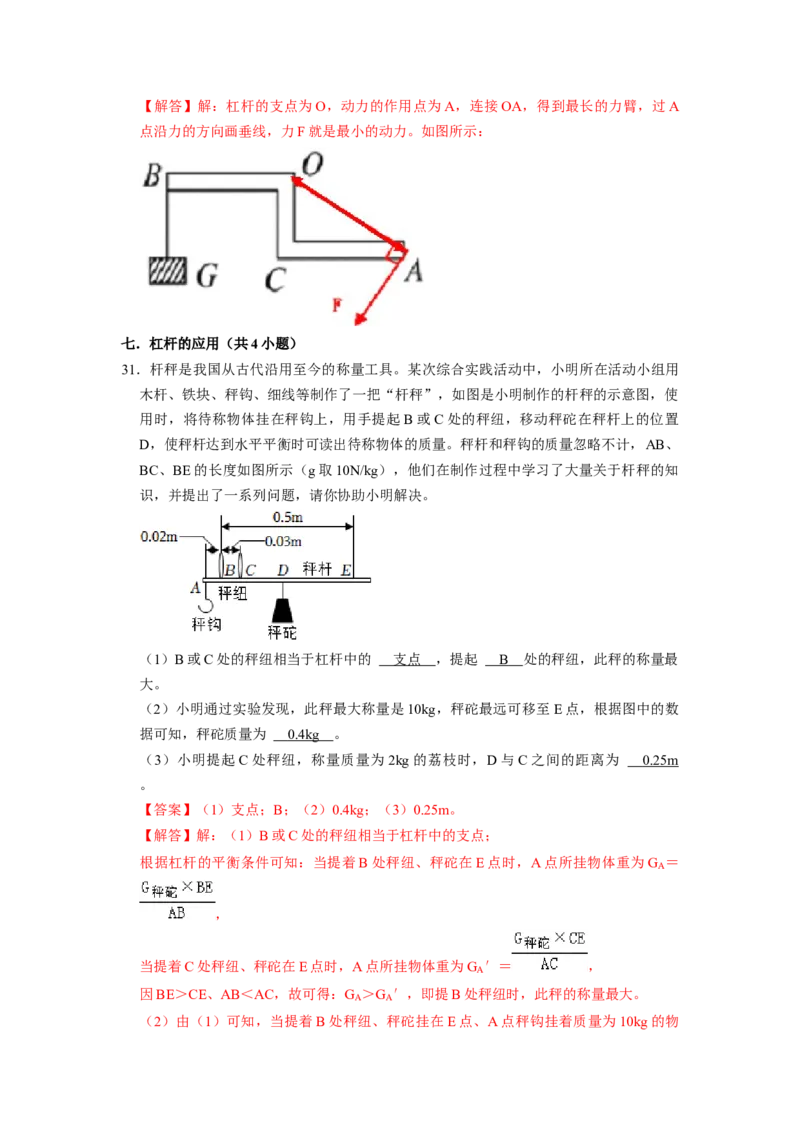
30.如图所示是一弯曲的杠杆,O是支点,在B点挂一重物G,要使杠杆平衡,请画出作
用在A点最小的力的示意图。
【答案】见试题解答内容【解答】解:杠杆的支点为O,动力的作用点为A,连接OA,得到最长的力臂,过A
点沿力的方向画垂线,力F就是最小的动力。如图所示:
七.杠杆的应用(共4小题)
31.杆秤是我国从古代沿用至今的称量工具。某次综合实践活动中,小明所在活动小组用
木杆、铁块、秤钩、细线等制作了一把“杆秤”,如图是小明制作的杆秤的示意图,使
用时,将待称物体挂在秤钩上,用手提起B或C处的秤纽,移动秤砣在秤杆上的位置
D,使秤杆达到水平平衡时可读出待称物体的质量。秤杆和秤钩的质量忽略不计,AB、
BC、BE的长度如图所示(g取10N/kg),他们在制作过程中学习了大量关于杆秤的知
识,并提出了一系列问题,请你协助小明解决。
(1)B或C处的秤纽相当于杠杆中的 支点 ,提起 B 处的秤纽,此秤的称量最
大。
(2)小明通过实验发现,此秤最大称量是10kg,秤砣最远可移至E点,根据图中的数
据可知,秤砣质量为 0.4k g 。
(3)小明提起C处秤纽,称量质量为2kg的荔枝时,D与C之间的距离为 0.25m
。
【答案】(1)支点;B;(2)0.4kg;(3)0.25m。
【解答】解:(1)B或C处的秤纽相当于杠杆中的支点;
根据杠杆的平衡条件可知:当提着B处秤纽、秤砣在E点时,A点所挂物体重为G =
A
,
当提着C处秤纽、秤砣在E点时,A点所挂物体重为G ′= ,
A
因BE>CE、AB<AC,故可得:G >G ′,即提B处秤纽时,此秤的称量最大。
A A
(2)由(1)可知,当提着B处秤纽、秤砣挂在E点、A点秤钩挂着质量为10kg的物体时,秤杆可以在水平位置平衡,则可列式:G
A
•AB=G秤砣 •BE。
由G=mg可得:m
A
g•AB=m秤砣g•BE,
则m秤砣 = = =0.4kg。
(3)当提起C处秤纽称一袋质量为2kg的荔枝时,阻力臂为
AC=AB+BC=0.02m+0.03m=0.05m,
根据杠杆的平衡条件可列式:G荔枝 •AC=G秤砣 •CD。
由G=mg可得:m荔枝g•AC=m秤砣g•CD,
则CD= = =0.25m。
故答案为:(1)支点;B;(2)0.4kg;(3)0.25m。
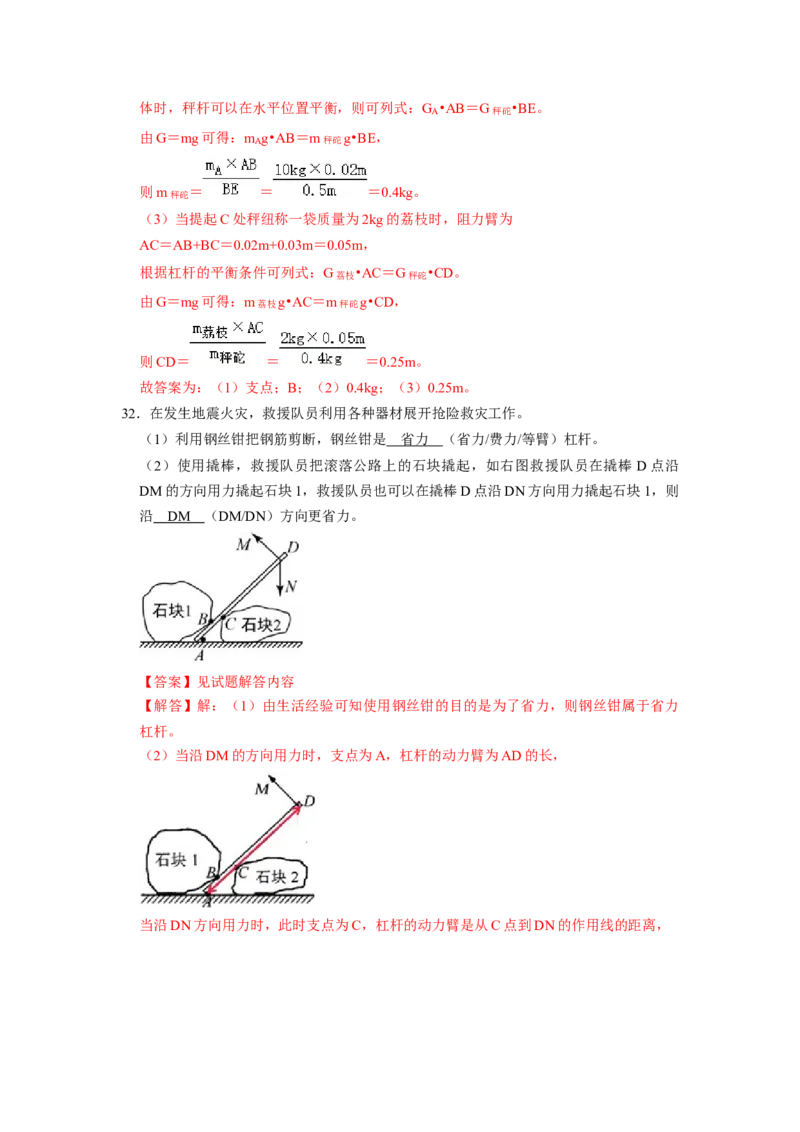
32.在发生地震火灾,救援队员利用各种器材展开抢险救灾工作。
(1)利用钢丝钳把钢筋剪断,钢丝钳是 省力 (省力/费力/等臂)杠杆。
(2)使用撬棒,救援队员把滚落公路上的石块撬起,如右图救援队员在撬棒 D点沿
DM的方向用力撬起石块1,救援队员也可以在撬棒D点沿DN方向用力撬起石块1,则
沿 DM (DM/DN)方向更省力。
【答案】见试题解答内容
【解答】解:(1)由生活经验可知使用钢丝钳的目的是为了省力,则钢丝钳属于省力
杠杆。
(2)当沿DM的方向用力时,支点为A,杠杆的动力臂为AD的长,
当沿DN方向用力时,此时支点为C,杠杆的动力臂是从C点到DN的作用线的距离,显然此时的动力臂要比AD要短,
因此,由杠杆平衡条件可知,沿DM方向用力撬石块1时更省力。
故答案为:(1)省力;(2)DM。
33.在一次课外活动中,老师让物理课外小组的同学们测一生肖鸡的生日蜡烛的质量,如
图所示。除了此蜡烛,老师还提供的器材有:一根质地均匀、粗细相同的长细木棒,一
把刻度尺,一个烧杯(该蜡烛体积较大无法放入此烧杯中),若干细绳,一个正方体木
块(内部嵌有铁钉,其平均密度小于水的密度;表面经处理后不吸水)及足量的水。请
你利用上述器材(器材均满足实验需求),帮助他们设计一个实验方案,测出生日蜡烛
的质量。要求:
(1)写出主要实验步骤及要测量的物理量;
(2)写出蜡烛质量的数学表达式。(用已知量和测得量表示)
【答案】见试题解答内容
【解答】解:(1)实验步骤:
①用刻度尺测出木块的边长为h ;
1
②烧杯中装适量水,将木块缓慢放入烧杯中,待木块静止后,用刻度尺测出木块露出
水面的长度为h ;
2
③用细绳做成绳环套在细木棒上,移动绳环位置,使细木棒在水平位置上平衡,并将
绳环位置固定。(绳环被固定的位置即为杠杆支点位置)
④将用细绳系好的生日蜡烛系在细木棒支点左侧某位置,然后再将另一细绳系好木块;
并做成绳环套在细木棒支点右侧某位置,并移动木块绳环的位置,使细木棒保持水平平
衡;
⑤用刻度尺分别测出生日蜡烛位置处到支点的距离为 L 和挂木块绳环处到支点的距离
1
为L ;
2
(2)木块静止在水面上时,根据漂浮条件可知:
G木 =F浮 = 水gV排 = 水gh
1
2(h
1
﹣h
2
),
细木棒在生日蜡烛和木块的作用下,保持水平平衡时;根据杠杆平衡条件可得:
ρ ρ
GL
1
=G木L
2
;所以,G= = ;
则m= = 。
答:(1)实验步骤:
①用刻度尺测出木块的边长为h ;
1
②烧杯中装适量水,将木块缓慢放入烧杯中,待木块静止后,用刻度尺测出木块露出
水面的长度为h ;
2
③用细绳做成绳环套在细木棒上,移动绳环位置,使细木棒在水平位置上平衡,并将
绳环位置固定。(绳环被固定的位置即为杠杆支点位置)
④将用细绳系好的生日蜡烛系在细木棒支点左侧某位置,然后再将另一细绳系好木块;
并做成绳环套在细木棒支点右侧某位置,并移动木块绳环的位置,使细木棒保持水平平
衡;
⑤用刻度尺分别测出生日蜡烛位置处到支点的距离为 L 和挂木块绳环处到支点的距离
1
为L ;
2
(2)m= 。
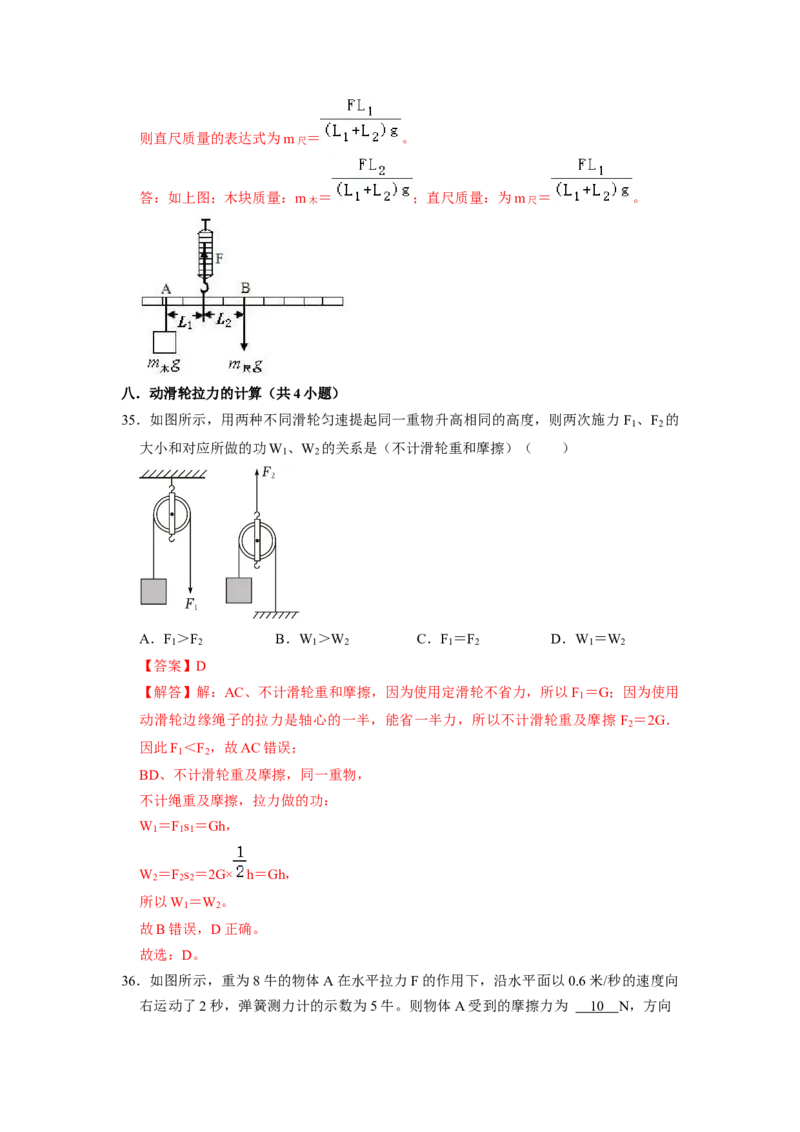
34.现有一把质量均匀的零点位于端点的质量未知米尺,一个质量未知的木块及质量不计
的细线。试用这些器件设计一实验装置(要求画出示意图),用一个弹簧测力计(可随
便找地方悬挂),通过一次测量(弹簧测力计只准读一次数),求出木块的质量和尺的
质量。
【答案】见试题解答内容
【解答】解:(1)实验示意图如图:
(2)实验步骤:
①将弹簧测力计从直尺中心偏左的任一位置用细线悬挂起来;
②将木块悬挂在弹簧测力计的左端;
③移动木块悬挂的位置,直至直尺在水平位置平衡。
(3)测量的物理量是:两力臂分别为L 、L ,弹簧测力计的示数为F。
1 2
(4)推导木块和直尺质量的表达式:
①以B点为支点,向上提拉木块时,根据杠杆的平衡条件得m木g×(L
1
+L
2
)=F×L
2
,
则木块质量的表达式为:m木 = ;
②以A点为支点,向上提拉直尺时,根据杠杆的平衡条件得m尺g×(L
1
+L
2
)=F×L
1
,则直尺质量的表达式为m尺 = 。
答:如上图;木块质量:m木 = ;直尺质量:为m尺 = 。
八.动滑轮拉力的计算(共4小题)
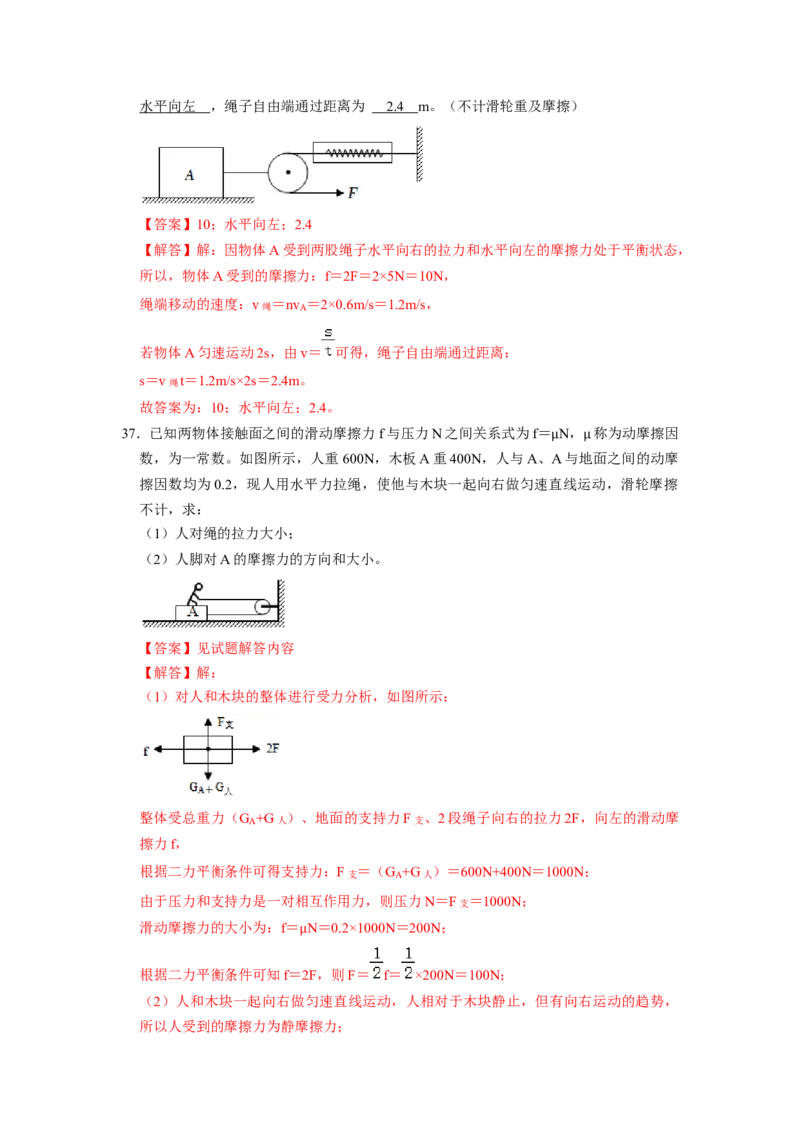
35.如图所示,用两种不同滑轮匀速提起同一重物升高相同的高度,则两次施力 F 、F 的
1 2
大小和对应所做的功W 、W 的关系是(不计滑轮重和摩擦)( )
1 2
A.F >F B.W >W C.F =F D.W =W
1 2 1 2 1 2 1 2
【答案】D
【解答】解:AC、不计滑轮重和摩擦,因为使用定滑轮不省力,所以F =G;因为使用
1
动滑轮边缘绳子的拉力是轴心的一半,能省一半力,所以不计滑轮重及摩擦 F =2G.
2
因此F <F ,故AC错误;
1 2
BD、不计滑轮重及摩擦,同一重物,
不计绳重及摩擦,拉力做的功:
W =F s =Gh,
1 1 1
W =F s =2G× h=Gh,
2 2 2
所以W =W 。
1 2
故B错误,D正确。
故选:D。
36.如图所示,重为8牛的物体A在水平拉力F的作用下,沿水平面以0.6米/秒的速度向
右运动了2秒,弹簧测力计的示数为5牛。则物体A受到的摩擦力为 10 N,方向水平向左 ,绳子自由端通过距离为 2. 4 m。(不计滑轮重及摩擦)
【答案】10;水平向左;2.4
【解答】解:因物体A受到两股绳子水平向右的拉力和水平向左的摩擦力处于平衡状态,
所以,物体A受到的摩擦力:f=2F=2×5N=10N,
绳端移动的速度:v绳 =nv
A
=2×0.6m/s=1.2m/s,
若物体A匀速运动2s,由v= 可得,绳子自由端通过距离:
s=v绳t=1.2m/s×2s=2.4m。
故答案为:10;水平向左;2.4。
37.已知两物体接触面之间的滑动摩擦力f与压力N之间关系式为f= N, 称为动摩擦因
数,为一常数。如图所示,人重600N,木板A重400N,人与A、A与地面之间的动摩
μ μ
擦因数均为0.2,现人用水平力拉绳,使他与木块一起向右做匀速直线运动,滑轮摩擦
不计,求:
(1)人对绳的拉力大小;
(2)人脚对A的摩擦力的方向和大小。
【答案】见试题解答内容
【解答】解:
(1)对人和木块的整体进行受力分析,如图所示:
整体受总重力(G
A
+G人 )、地面的支持力F支 、2段绳子向右的拉力2F,向左的滑动摩
擦力f,
根据二力平衡条件可得支持力:F支 =(G
A
+G人 )=600N+400N=1000N;
由于压力和支持力是一对相互作用力,则压力N=F支 =1000N;
滑动摩擦力的大小为:f= N=0.2×1000N=200N;
μ
根据二力平衡条件可知f=2F,则F= f= ×200N=100N;
(2)人和木块一起向右做匀速直线运动,人相对于木块静止,但有向右运动的趋势,
所以人受到的摩擦力为静摩擦力;对人进行受力分析,受重力、木块的支持力、绳子向右的拉力F、向左的静摩擦力,
根据二力平衡条件可知,绳子的拉力与静摩擦力平衡,都等于100N,即木块A对人的
脚施加向左的摩擦力,大小为100N;
根据力作用的相互性可知,人脚对A的摩擦力的方向是水平向右,大小也为100N。
答:(1)人对绳的拉力为100N;
(2)人脚对A的摩擦力的方向是水平向右,大小为100N。
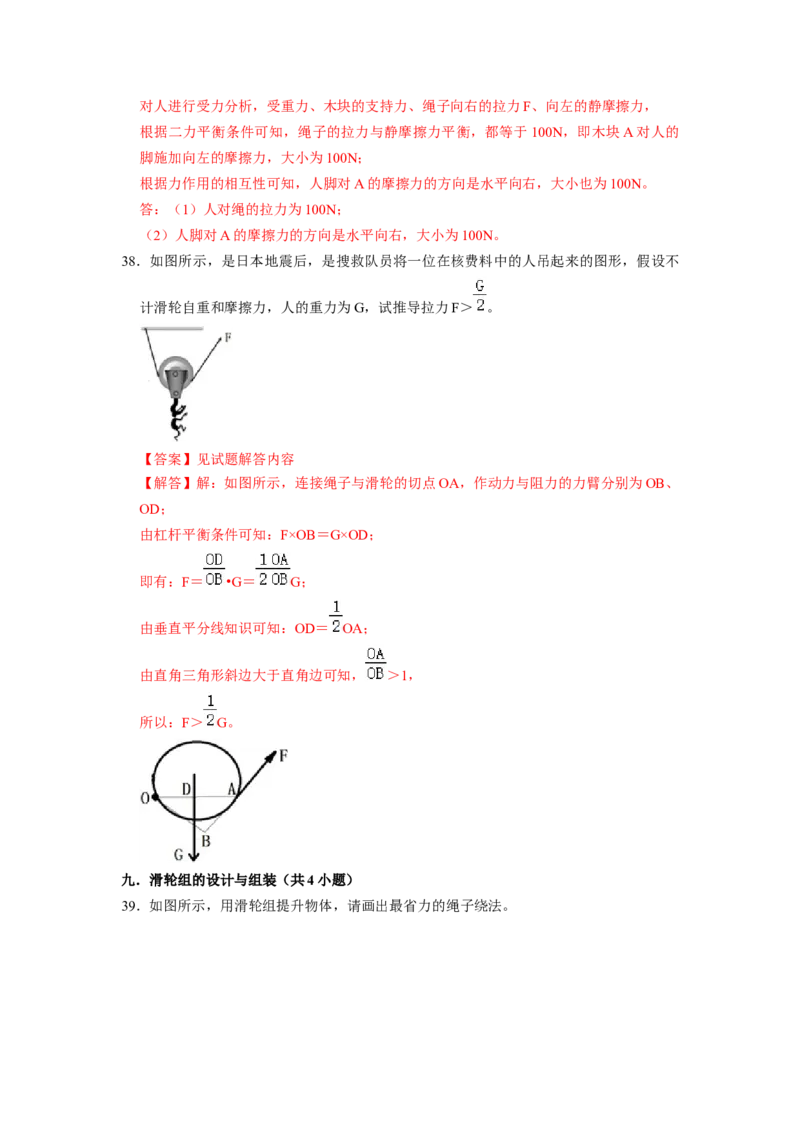
38.如图所示,是日本地震后,是搜救队员将一位在核费料中的人吊起来的图形,假设不
计滑轮自重和摩擦力,人的重力为G,试推导拉力F> 。
【答案】见试题解答内容
【解答】解:如图所示,连接绳子与滑轮的切点OA,作动力与阻力的力臂分别为OB、
OD;
由杠杆平衡条件可知:F×OB=G×OD;
即有:F= •G= G;
由垂直平分线知识可知:OD= OA;
由直角三角形斜边大于直角边可知, >1,
所以:F> G。
九.滑轮组的设计与组装(共4小题)
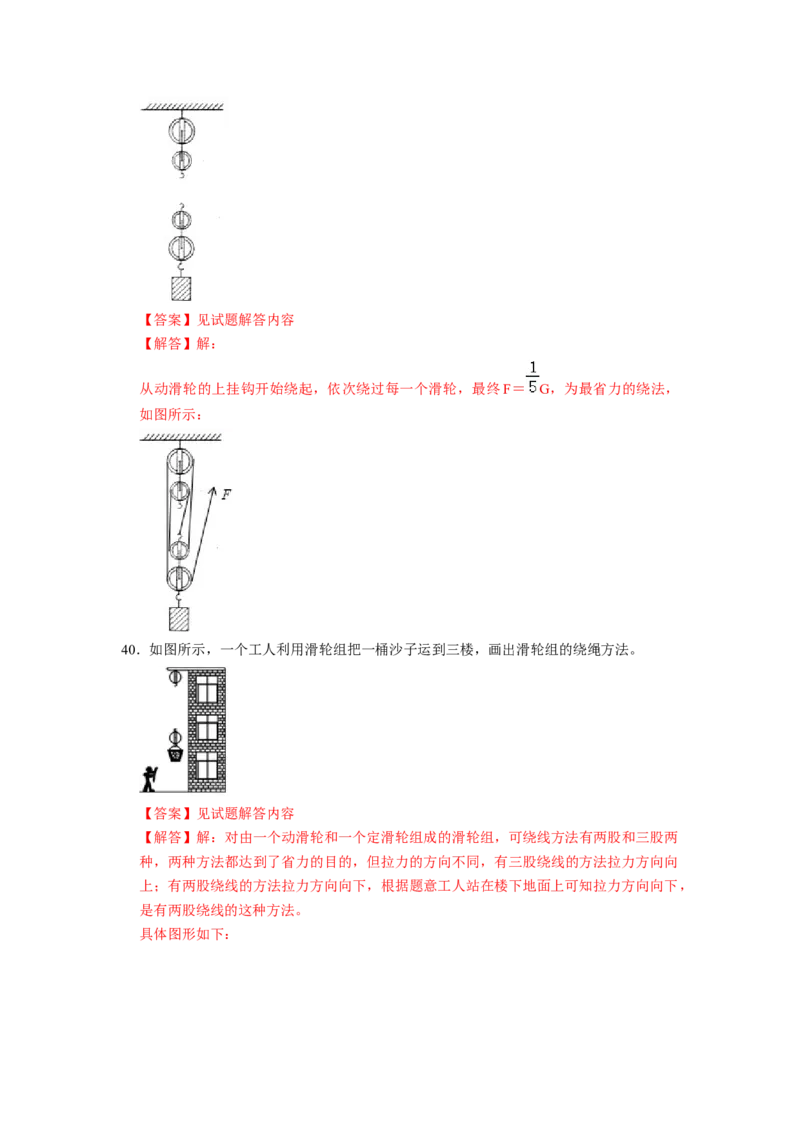
39.如图所示,用滑轮组提升物体,请画出最省力的绳子绕法。【答案】见试题解答内容
【解答】解:
从动滑轮的上挂钩开始绕起,依次绕过每一个滑轮,最终F= G,为最省力的绕法,
如图所示:
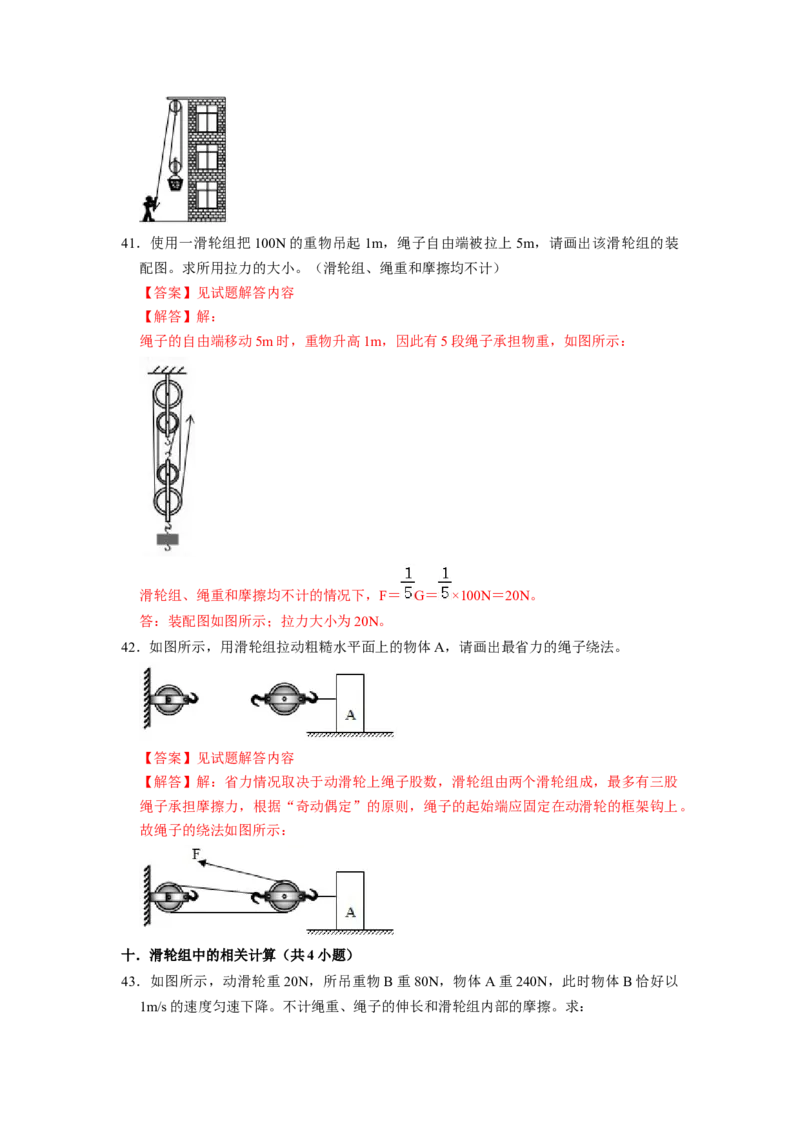
40.如图所示,一个工人利用滑轮组把一桶沙子运到三楼,画出滑轮组的绕绳方法。
【答案】见试题解答内容
【解答】解:对由一个动滑轮和一个定滑轮组成的滑轮组,可绕线方法有两股和三股两
种,两种方法都达到了省力的目的,但拉力的方向不同,有三股绕线的方法拉力方向向
上;有两股绕线的方法拉力方向向下,根据题意工人站在楼下地面上可知拉力方向向下,
是有两股绕线的这种方法。
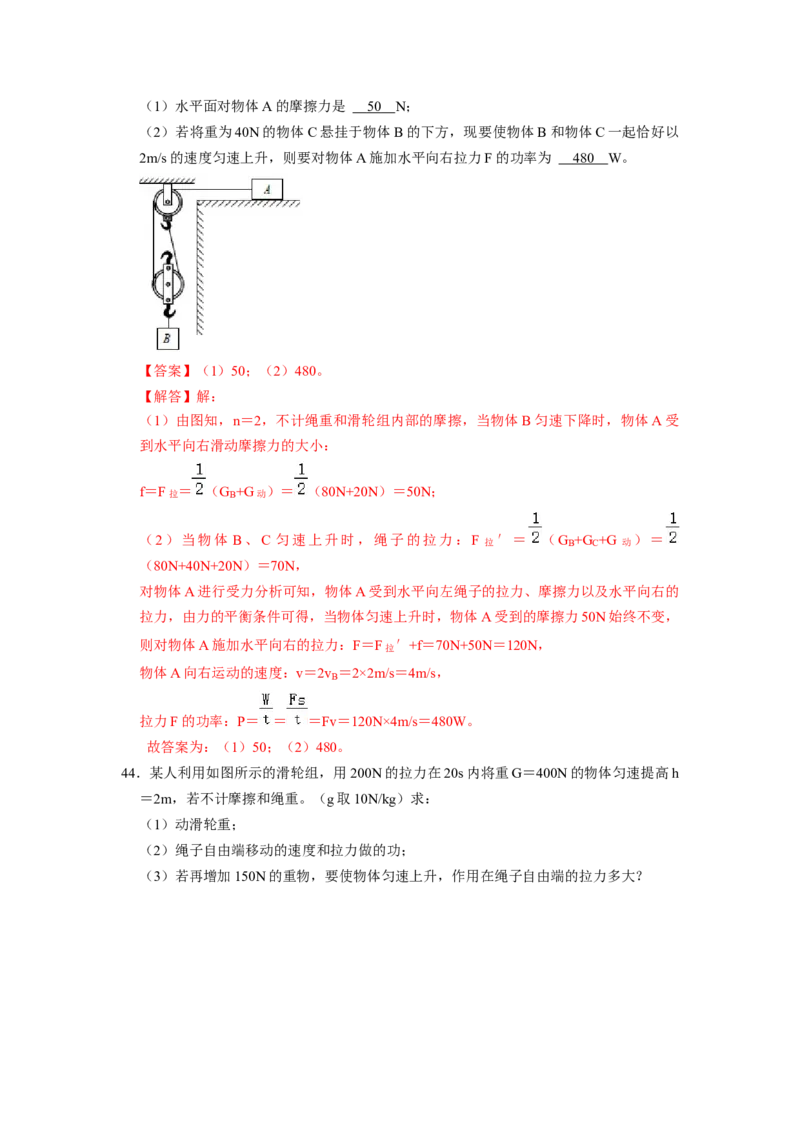
具体图形如下:41.使用一滑轮组把100N的重物吊起1m,绳子自由端被拉上5m,请画出该滑轮组的装
配图。求所用拉力的大小。(滑轮组、绳重和摩擦均不计)
【答案】见试题解答内容
【解答】解:
绳子的自由端移动5m时,重物升高1m,因此有5段绳子承担物重,如图所示:
滑轮组、绳重和摩擦均不计的情况下,F= G= ×100N=20N。
答:装配图如图所示;拉力大小为20N。
42.如图所示,用滑轮组拉动粗糙水平面上的物体A,请画出最省力的绳子绕法。
【答案】见试题解答内容
【解答】解:省力情况取决于动滑轮上绳子股数,滑轮组由两个滑轮组成,最多有三股
绳子承担摩擦力,根据“奇动偶定”的原则,绳子的起始端应固定在动滑轮的框架钩上。
故绳子的绕法如图所示:
十.滑轮组中的相关计算(共4小题)
43.如图所示,动滑轮重20N,所吊重物B重80N,物体A重240N,此时物体B恰好以
1m/s的速度匀速下降。不计绳重、绳子的伸长和滑轮组内部的摩擦。求:(1)水平面对物体A的摩擦力是 5 0 N;
(2)若将重为40N的物体C悬挂于物体B的下方,现要使物体B和物体C一起恰好以
2m/s的速度匀速上升,则要对物体A施加水平向右拉力F的功率为 48 0 W。
【答案】(1)50;(2)480。
【解答】解:
(1)由图知,n=2,不计绳重和滑轮组内部的摩擦,当物体B匀速下降时,物体A受
到水平向右滑动摩擦力的大小:
f=F拉 = (G
B
+G动 )= (80N+20N)=50N;
(2)当物体 B、C 匀速上升时,绳子的拉力:F 拉 ′= (G B +G C +G 动 )=
(80N+40N+20N)=70N,
对物体A进行受力分析可知,物体A受到水平向左绳子的拉力、摩擦力以及水平向右的
拉力,由力的平衡条件可得,当物体匀速上升时,物体A受到的摩擦力50N始终不变,
则对物体A施加水平向右的拉力:F=F拉 ′+f=70N+50N=120N,
物体A向右运动的速度:v=2v =2×2m/s=4m/s,
B
拉力F的功率:P= = =Fv=120N×4m/s=480W。
故答案为:(1)50;(2)480。
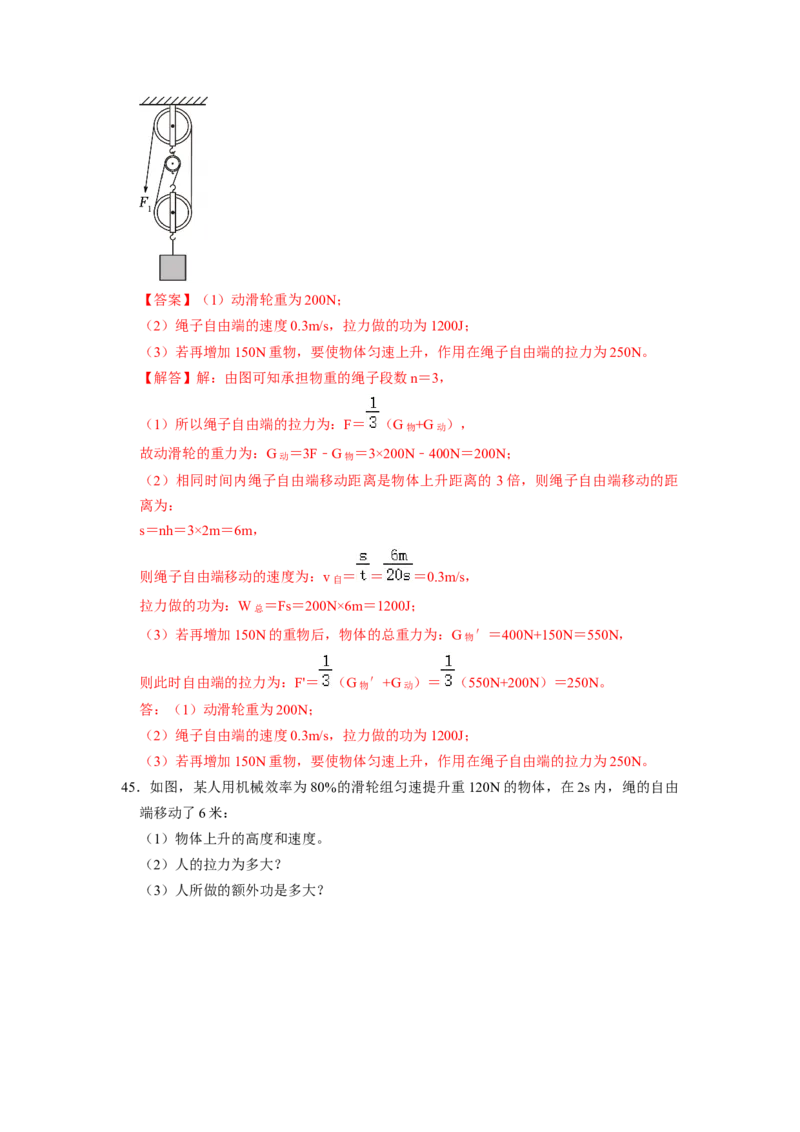
44.某人利用如图所示的滑轮组,用200N的拉力在20s内将重G=400N的物体匀速提高h
=2m,若不计摩擦和绳重。(g取10N/kg)求:
(1)动滑轮重;
(2)绳子自由端移动的速度和拉力做的功;
(3)若再增加150N的重物,要使物体匀速上升,作用在绳子自由端的拉力多大?【答案】(1)动滑轮重为200N;
(2)绳子自由端的速度0.3m/s,拉力做的功为1200J;
(3)若再增加150N重物,要使物体匀速上升,作用在绳子自由端的拉力为250N。
【解答】解:由图可知承担物重的绳子段数n=3,
(1)所以绳子自由端的拉力为:F= (G物+G动 ),
故动滑轮的重力为:G动 =3F﹣G物 =3×200N﹣400N=200N;
(2)相同时间内绳子自由端移动距离是物体上升距离的 3倍,则绳子自由端移动的距
离为:
s=nh=3×2m=6m,
则绳子自由端移动的速度为:v自 = = =0.3m/s,
拉力做的功为:W总 =Fs=200N×6m=1200J;
(3)若再增加150N的重物后,物体的总重力为:G物 ′=400N+150N=550N,
则此时自由端的拉力为:F'= (G物 ′+G动 )= (550N+200N)=250N。
答:(1)动滑轮重为200N;
(2)绳子自由端的速度0.3m/s,拉力做的功为1200J;
(3)若再增加150N重物,要使物体匀速上升,作用在绳子自由端的拉力为250N。
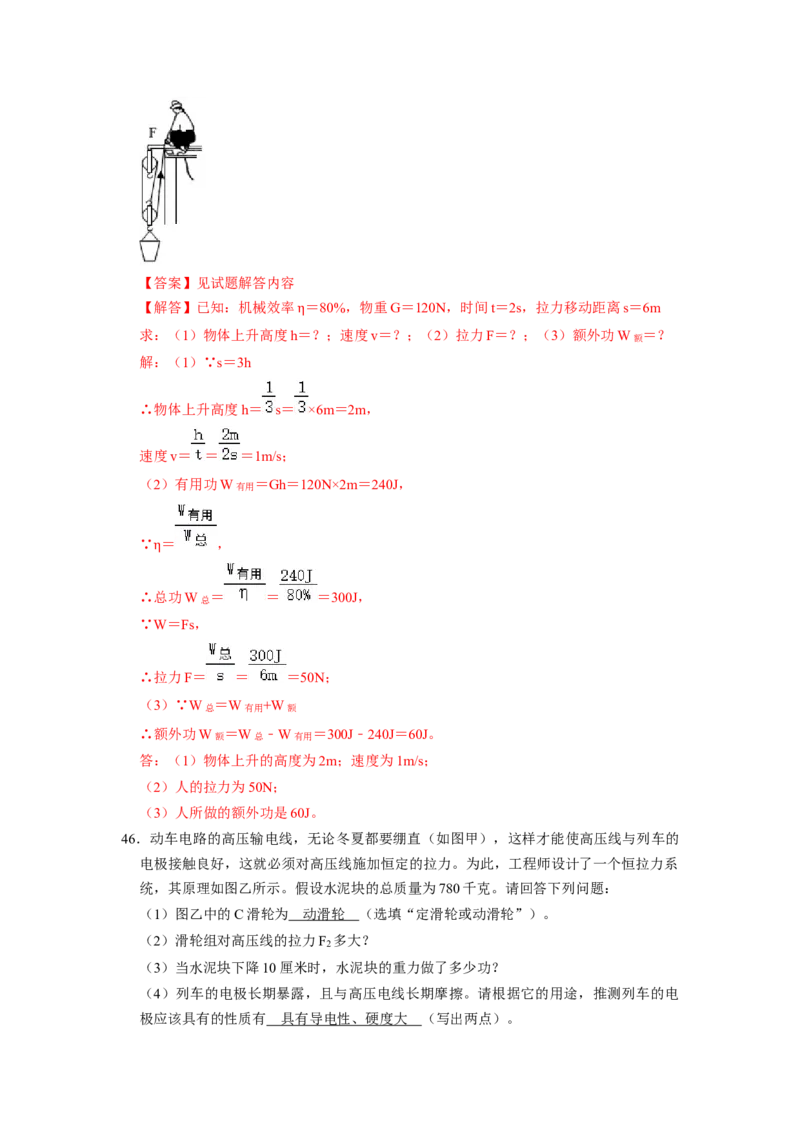
45.如图,某人用机械效率为80%的滑轮组匀速提升重120N的物体,在2s内,绳的自由
端移动了6米:
(1)物体上升的高度和速度。
(2)人的拉力为多大?
(3)人所做的额外功是多大?【答案】见试题解答内容
【解答】已知:机械效率 =80%,物重G=120N,时间t=2s,拉力移动距离s=6m
求:(1)物体上升高度hη =?;速度v=?;(2)拉力F=?;(3)额外功W额 =?
解:(1)∵s=3h
∴物体上升高度h= s= ×6m=2m,
速度v= = =1m/s;
(2)有用功W有用 =Gh=120N×2m=240J,
∵ = ,
η
∴总功W总 = = =300J,
∵W=Fs,
∴拉力F= = =50N;
(3)∵W总 =W有用+W额
∴额外功W额 =W总 ﹣W有用 =300J﹣240J=60J。
答:(1)物体上升的高度为2m;速度为1m/s;
(2)人的拉力为50N;
(3)人所做的额外功是60J。
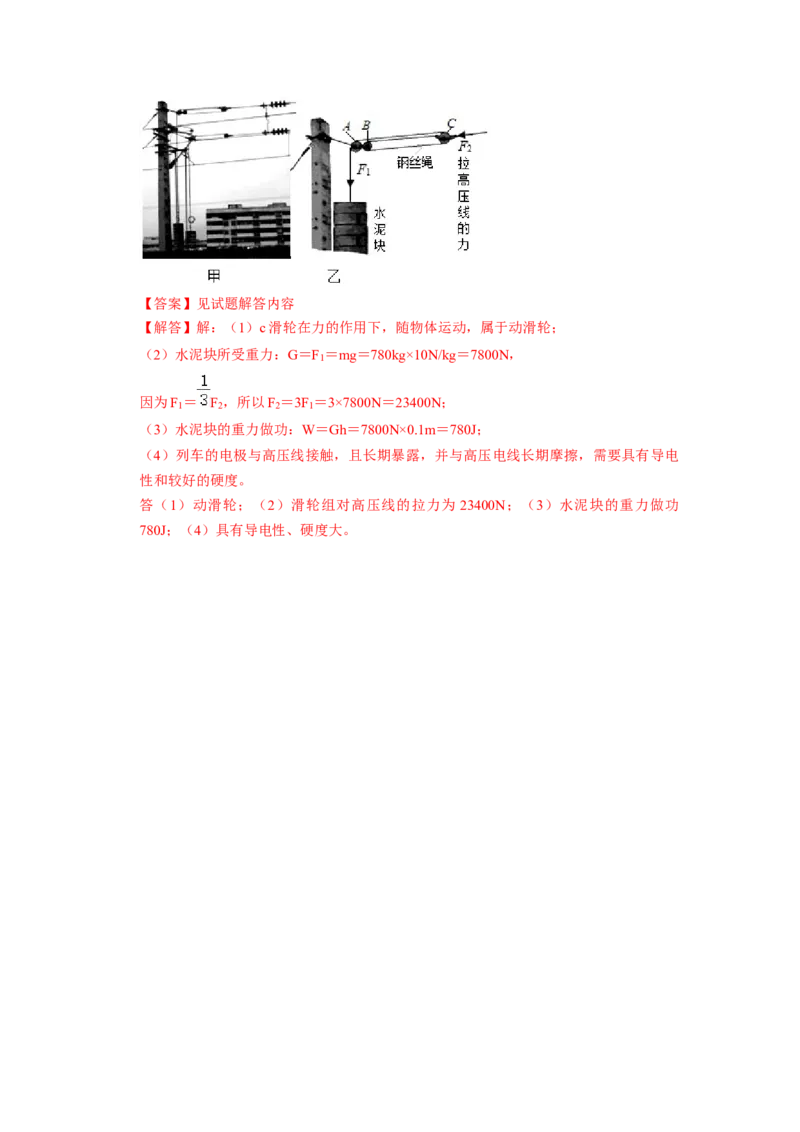
46.动车电路的高压输电线,无论冬夏都要绷直(如图甲),这样才能使高压线与列车的
电极接触良好,这就必须对高压线施加恒定的拉力。为此,工程师设计了一个恒拉力系
统,其原理如图乙所示。假设水泥块的总质量为780千克。请回答下列问题:
(1)图乙中的C滑轮为 动滑轮 (选填“定滑轮或动滑轮”)。
(2)滑轮组对高压线的拉力F 多大?
2
(3)当水泥块下降10厘米时,水泥块的重力做了多少功?
(4)列车的电极长期暴露,且与高压电线长期摩擦。请根据它的用途,推测列车的电
极应该具有的性质有 具有导电性、硬度大 (写出两点)。【答案】见试题解答内容
【解答】解:(1)c滑轮在力的作用下,随物体运动,属于动滑轮;
(2)水泥块所受重力:G=F =mg=780kg×10N/kg=7800N,
1
因为F = F ,所以F =3F =3×7800N=23400N;
1 2 2 1
(3)水泥块的重力做功:W=Gh=7800N×0.1m=780J;
(4)列车的电极与高压线接触,且长期暴露,并与高压电线长期摩擦,需要具有导电
性和较好的硬度。
答(1)动滑轮;(2)滑轮组对高压线的拉力为 23400N;(3)水泥块的重力做功
780J;(4)具有导电性、硬度大。

