
文档内容
专题 09 杠杆平衡实验
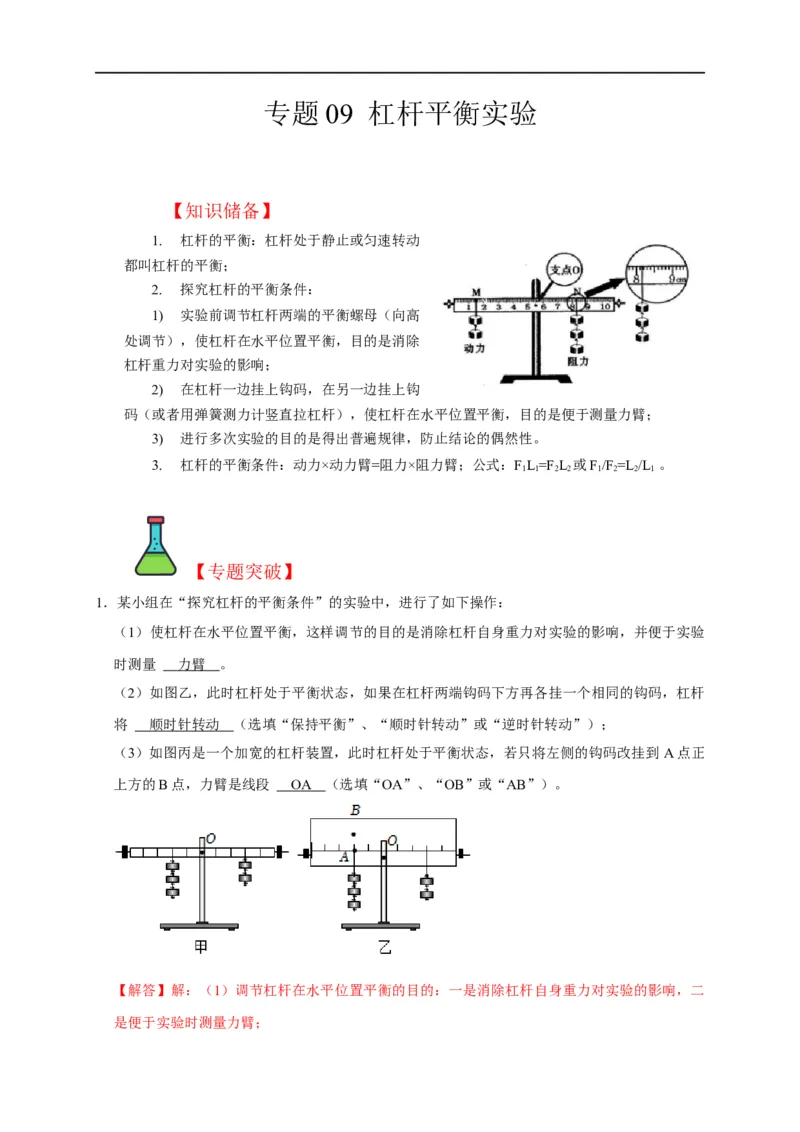
【知识储备】
1. 杠杆的平衡:杠杆处于静止或匀速转动
都叫杠杆的平衡;
2. 探究杠杆的平衡条件:
1) 实验前调节杠杆两端的平衡螺母(向高
处调节),使杠杆在水平位置平衡,目的是消除
杠杆重力对实验的影响;
2) 在杠杆一边挂上钩码,在另一边挂上钩
码(或者用弹簧测力计竖直拉杠杆),使杠杆在水平位置平衡,目的是便于测量力臂;
3) 进行多次实验的目的是得出普遍规律,防止结论的偶然性。
3. 杠杆的平衡条件:动力×动力臂=阻力×阻力臂;公式:FL=F L 或F/F =L/L 。
1 1 2 2 1 2 2 1
【专题突破】
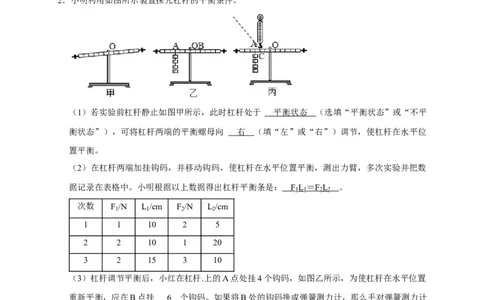
1.某小组在“探究杠杆的平衡条件”的实验中,进行了如下操作:
(1)使杠杆在水平位置平衡,这样调节的目的是消除杠杆自身重力对实验的影响,并便于实验
时测量 力臂 。
(2)如图乙,此时杠杆处于平衡状态,如果在杠杆两端钩码下方再各挂一个相同的钩码,杠杆
将 顺时针转动 (选填“保持平衡”、“顺时针转动”或“逆时针转动”);
(3)如图丙是一个加宽的杠杆装置,此时杠杆处于平衡状态,若只将左侧的钩码改挂到 A点正
上方的B点,力臂是线段 OA (选填“OA”、“OB”或“AB”)。
【解答】解:(1)调节杠杆在水平位置平衡的目的:一是消除杠杆自身重力对实验的影响,二
是便于实验时测量力臂;(2)将图中乙的杠杆调节水平平衡后,在杠杆左右两边钩码下同时增加一个相同的钩码,设每
个钩码重G,每小格长L,根据杠杆的平衡条件:左边:4G×2L=8GL;
右边:3G×3L=9GL,右边的乘积大于左边的乘积,杠杆右端下沉,左端上升,即沿顺时针方向
转动;
(3)力臂是支点到力的作用线的距离,将左侧的钩码改挂到 A点正上方的B点,力臂是线段
OA与原来相比较力和力臂都没有改变,所以杠杆仍能保持平衡。
故答案为:(1)力臂; (2 )顺时针转动;(3)OA。
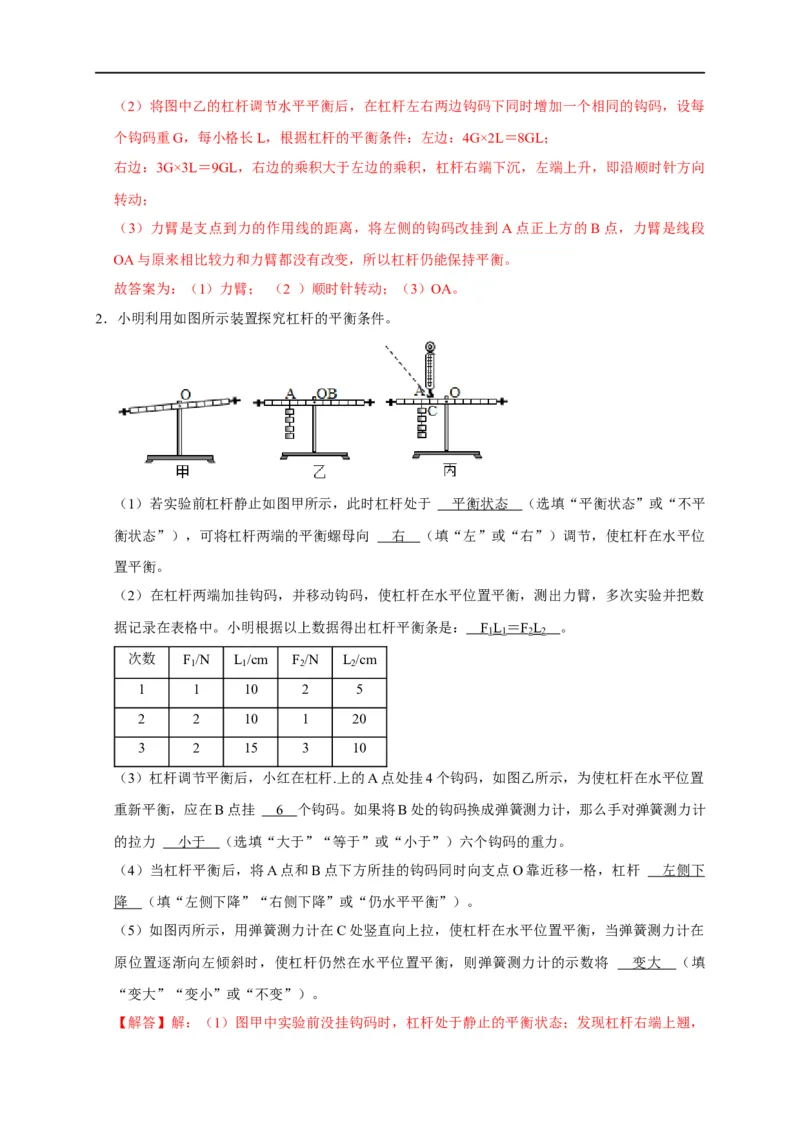
2.小明利用如图所示装置探究杠杆的平衡条件。
(1)若实验前杠杆静止如图甲所示,此时杠杆处于 平衡状态 (选填“平衡状态”或“不平
衡状态”),可将杠杆两端的平衡螺母向 右 (填“左”或“右”)调节,使杠杆在水平位
置平衡。
(2)在杠杆两端加挂钩码,并移动钩码,使杠杆在水平位置平衡,测出力臂,多次实验并把数
据记录在表格中。小明根据以上数据得出杠杆平衡条是: F L = F L 。
1 1 2 2
次数 F /N L /cm F /N L /cm
1 1 2 2
1 1 10 2 5
2 2 10 1 20
3 2 15 3 10
(3)杠杆调节平衡后,小红在杠杆.上的A点处挂4个钩码,如图乙所示,为使杠杆在水平位置
重新平衡,应在B点挂 6 个钩码。如果将B处的钩码换成弹簧测力计,那么手对弹簧测力计
的拉力 小于 (选填“大于”“等于”或“小于”)六个钩码的重力。
(4)当杠杆平衡后,将A点和B点下方所挂的钩码同时向支点O靠近移一格,杠杆 左侧下
降 (填“左侧下降”“右侧下降”或“仍水平平衡”)。
(5)如图丙所示,用弹簧测力计在C处竖直向上拉,使杠杆在水平位置平衡,当弹簧测力计在
原位置逐渐向左倾斜时,使杠杆仍然在水平位置平衡,则弹簧测力计的示数将 变大 (填
“变大”“变小”或“不变”)。
【解答】解:(1)图甲中实验前没挂钩码时,杠杆处于静止的平衡状态;发现杠杆右端上翘,调节时重心应向右移动,应将两端的平衡螺母向右旋一些,使杠杆在水平位置平衡;
(2)分析表格中的数据可得出杠杆平衡的条件是:F L =F L ;
1 1 2 2
设杠杆每个格的长度为L,每个钩码的重力为G,根据杠杆的平衡条件:F L =F L ,
A A B B
即4G×3L=F ×2L,解得F =6G,需挂6个钩码;
B B
将B处的钩码换成弹簧测力计,那么手对弹簧测力计的拉力:
根据杠杆的平衡条件:F L =FL ,
A A B
即34G×3L=F×2L,解得F=6G,
手的拉力大小应该是对杠杆拉力的大小和弹簧测力计的重力大小之和,手对弹簧测力计的拉力
小于6个钩码;
(4)若A、B两点的钩码同时向靠近支点的方向移动一个格,则左侧4G×2L=8GL,右侧6G×L
=6GL,因为8GL>6GL,所以杠杆左侧下降;
(5)如果作用在杠杆上的力方向不与杠杆垂直则拉力的力臂变小了,就会使得拉力变大;
故答案为:(1)平衡状态;右;(2)F L =F L ;(3)6;小于;(4)左侧下降;(5)变大。
1 1 2 2
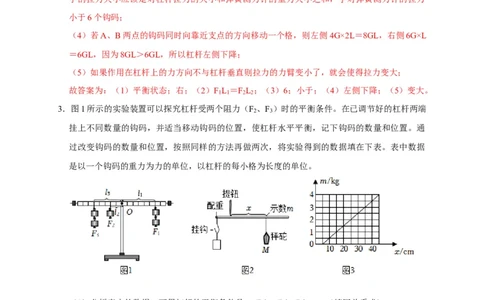
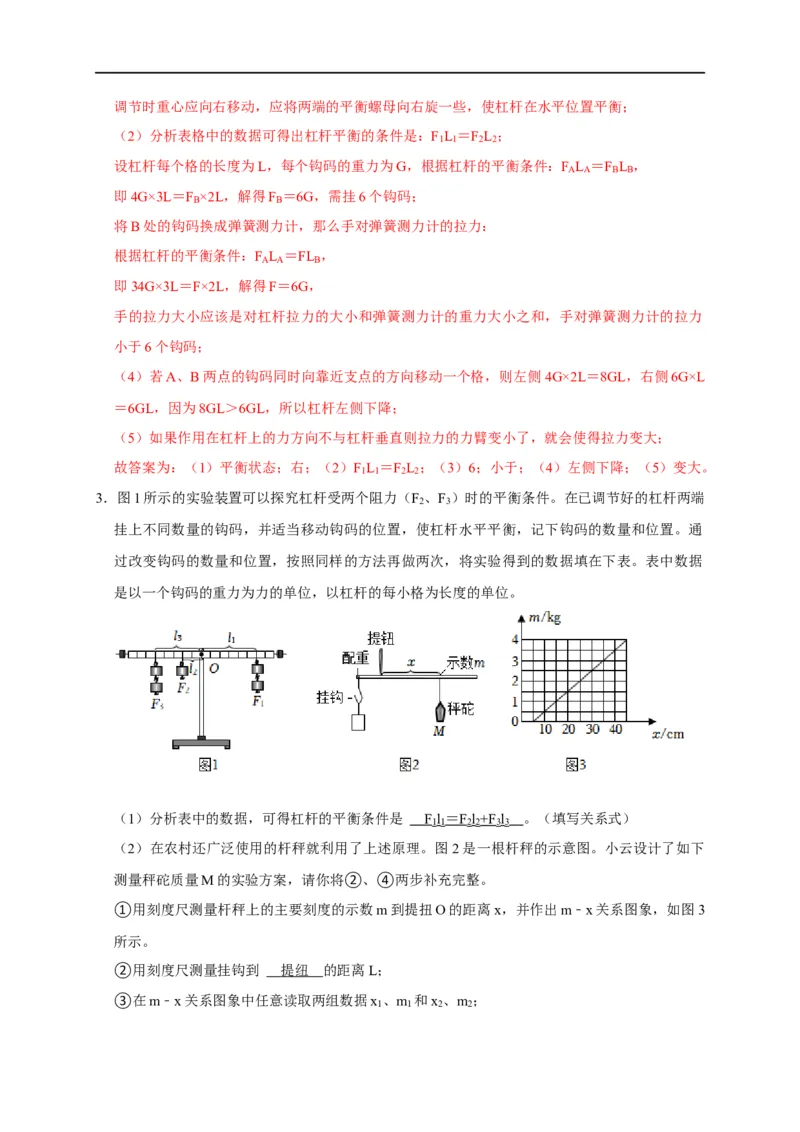
3.图1所示的实验装置可以探究杠杆受两个阻力(F 、F )时的平衡条件。在已调节好的杠杆两端
2 3
挂上不同数量的钩码,并适当移动钩码的位置,使杠杆水平平衡,记下钩码的数量和位置。通
过改变钩码的数量和位置,按照同样的方法再做两次,将实验得到的数据填在下表。表中数据
是以一个钩码的重力为力的单位,以杠杆的每小格为长度的单位。
(1)分析表中的数据,可得杠杆的平衡条件是 F l = F l +F l 。(填写关系式)
11 22 33
(2)在农村还广泛使用的杆秤就利用了上述原理。图2是一根杆秤的示意图。小云设计了如下
测量秤砣质量M的实验方案,请你将②、④两步补充完整。
①用刻度尺测量杆秤上的主要刻度的示数m到提扭O的距离x,并作出m﹣x关系图象,如图3
所示。
②用刻度尺测量挂钩到 提纽 的距离L;
③在m﹣x关系图象中任意读取两组数据x 、m 和x 、m ;
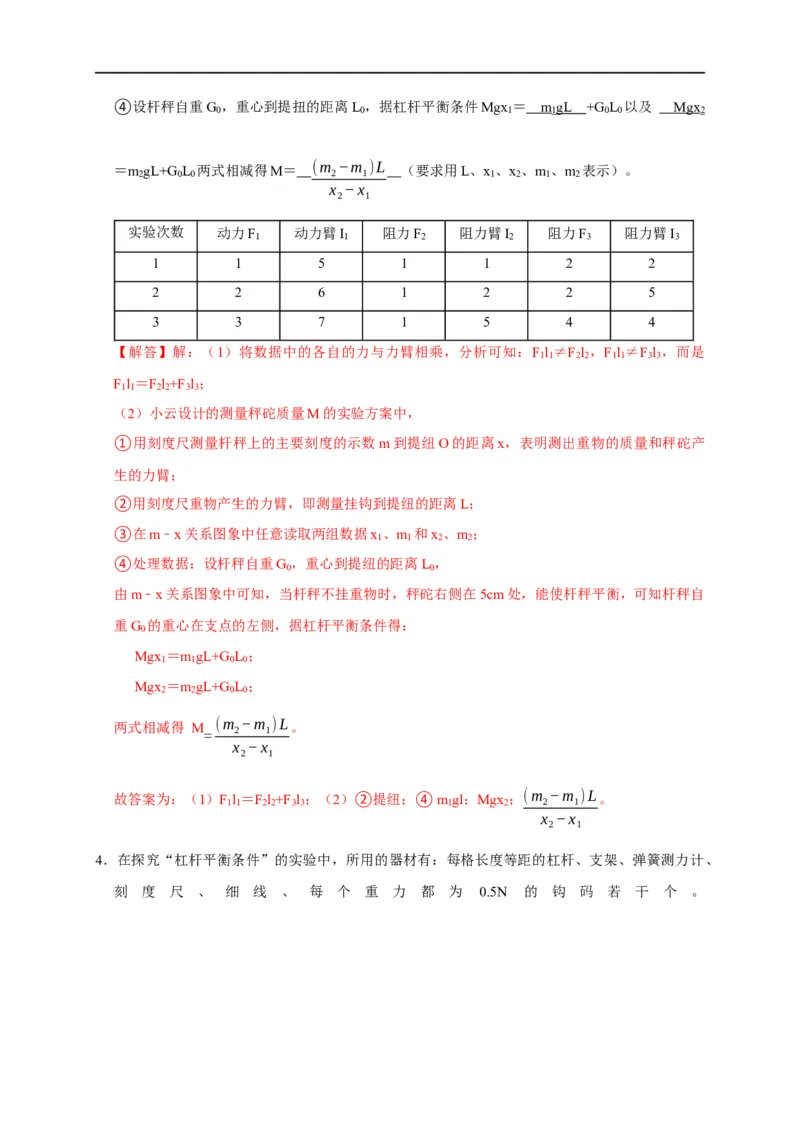
1 1 2 2④设杆秤自重G ,重心到提扭的距离L ,据杠杆平衡条件Mgx = m gL +G L 以及 Mg x
0 0 1 1 0 0 2
=m gL+G L 两式相减得M= (m −m )L (要求用L、x 、x 、m 、m 表示)。
2 0 0 2 1 1 2 1 2
x −x
2 1
实验次数 动力F 动力臂I 阻力F 阻力臂I 阻力F 阻力臂I
1 1 2 2 3 3
1 1 5 1 1 2 2
2 2 6 1 2 2 5
3 3 7 1 5 4 4
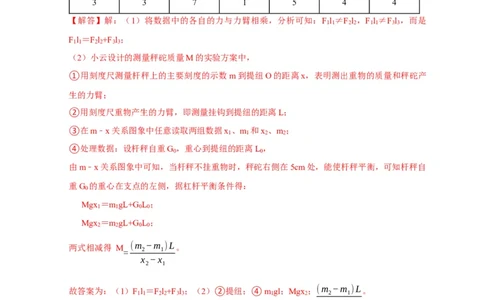
【解答】解:(1)将数据中的各自的力与力臂相乘,分析可知:F l ≠F l ,F l ≠F l ,而是
11 22 11 33
F l =F l +F l ;
11 22 33
(2)小云设计的测量秤砣质量M的实验方案中,
①用刻度尺测量杆秤上的主要刻度的示数m到提纽O的距离x,表明测出重物的质量和秤砣产
生的力臂;
②用刻度尺重物产生的力臂,即测量挂钩到提纽的距离L;
③在m﹣x关系图象中任意读取两组数据x 、m 和x 、m ;
1 1 2 2
④处理数据:设杆秤自重G ,重心到提纽的距离L ,
0 0
由m﹣x关系图象中可知,当杆秤不挂重物时,秤砣右侧在5cm处,能使杆秤平衡,可知杆秤自
重G 的重心在支点的左侧,据杠杆平衡条件得:
0
Mgx =m gL+G L ;
1 1 0 0
Mgx =m gL+G L ;
2 2 0 0
两式相减得 M (m −m )L。
= 2 1
x −x
2 1
故答案为:(1)F
1
l
1
=F
2
l
2
+F
3
l
3
;(2)②提纽;④m
1
gl;Mgx
2
;(m
2
−m
1
)L。
x −x
2 1
4.在探究“杠杆平衡条件”的实验中,所用的器材有:每格长度等距的杠杆、支架、弹簧测力计、
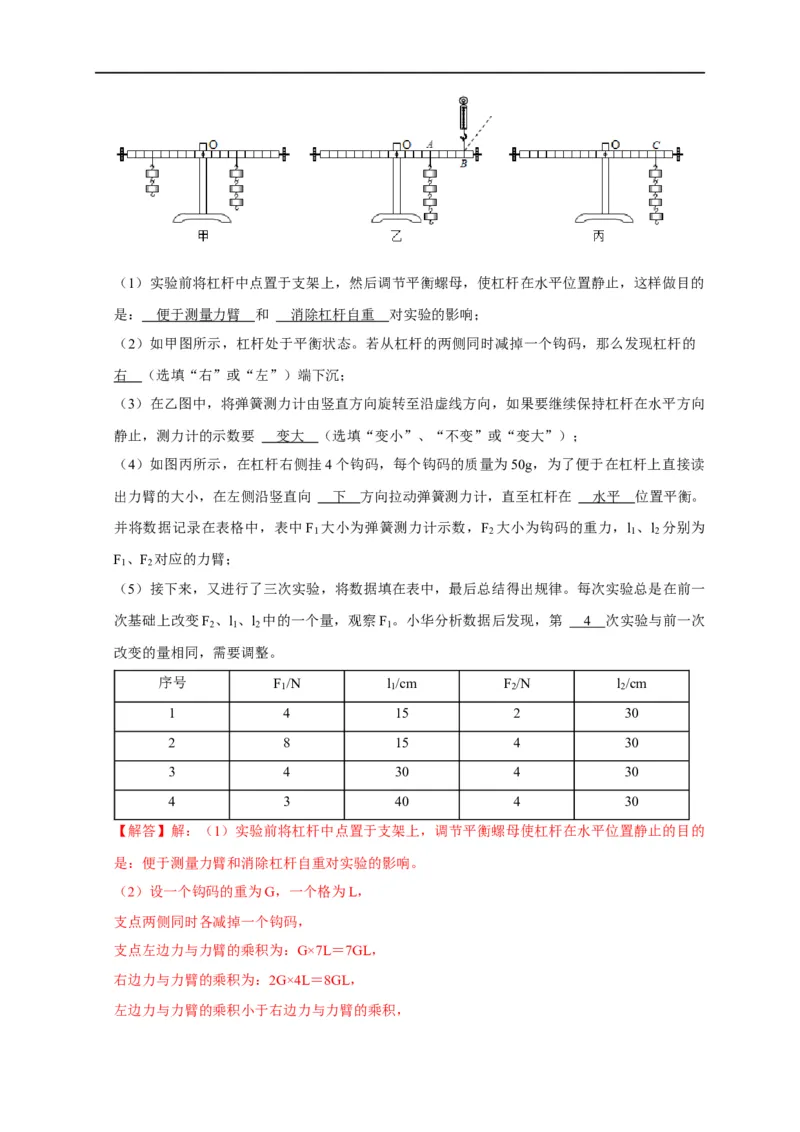
刻 度 尺 、 细 线 、 每 个 重 力 都 为 0.5N 的 钩 码 若 干 个 。(1)实验前将杠杆中点置于支架上,然后调节平衡螺母,使杠杆在水平位置静止,这样做目的
是: 便于测量力臂 和 消除杠杆自重 对实验的影响;
(2)如甲图所示,杠杆处于平衡状态。若从杠杆的两侧同时减掉一个钩码,那么发现杠杆的
右 (选填“右”或“左”)端下沉;
(3)在乙图中,将弹簧测力计由竖直方向旋转至沿虚线方向,如果要继续保持杠杆在水平方向
静止,测力计的示数要 变大 (选填“变小”、“不变”或“变大”);
(4)如图丙所示,在杠杆右侧挂4个钩码,每个钩码的质量为50g,为了便于在杠杆上直接读
出力臂的大小,在左侧沿竖直向 下 方向拉动弹簧测力计,直至杠杆在 水平 位置平衡。
并将数据记录在表格中,表中F 大小为弹簧测力计示数,F 大小为钩码的重力,l 、l 分别为
1 2 1 2
F 、F 对应的力臂;
1 2
(5)接下来,又进行了三次实验,将数据填在表中,最后总结得出规律。每次实验总是在前一
次基础上改变F 、l 、l 中的一个量,观察F 。小华分析数据后发现,第 4 次实验与前一次
2 1 2 1
改变的量相同,需要调整。
序号 F /N l /cm F /N l /cm
1 1 2 2
1 4 15 2 30
2 8 15 4 30
3 4 30 4 30
4 3 40 4 30
【解答】解:(1)实验前将杠杆中点置于支架上,调节平衡螺母使杠杆在水平位置静止的目的
是:便于测量力臂和消除杠杆自重对实验的影响。
(2)设一个钩码的重为G,一个格为L,
支点两侧同时各减掉一个钩码,
支点左边力与力臂的乘积为:G×7L=7GL,
右边力与力臂的乘积为:2G×4L=8GL,
左边力与力臂的乘积小于右边力与力臂的乘积,则杠杆右端下沉;
(3)将弹簧测力计由竖直方向旋转至沿虚线方向,阻力和阻力臂不变,拉力的力臂变小,由杠
杆平衡条件可知弹簧测力计的拉力变大。
(4)由图可知,在杠杆右侧挂4个钩码,为了便于在杠杆上直接读出力臂的大小,由于力臂是
支点到力的作用线的距离,所以在杠杆左侧沿竖直向下方向拉动弹簧测力计,直至杠杆在水平
位置平衡。
(5)由实验序号2、3可知,F 和l 不变,l 增大5cm,由序号4、3可知,F 和l 不变,l 增大
2 2 1 2 2 1
10cm,所以第4次次实验与前一次改变的量相同。由于改变 F 、l 、l 中的一个量,所以需要保
2 1 2
持F 和l 不变,改变l 的大小。
2 1 2
故答案为:(1)便于测量力臂;消除杠杆自重;(2)右;(3)变大;(4)下;水平;(5)
4。
5.图甲所示的杆秤是中华民族测量质量的基本量具,为体验杆秤的制作过程,小明和爸爸找来了
一根一端粗一端细的圆木、200g的钩码、100g和500g的物体各一个、铁丝钩、细绳、钻孔器、
刻度尺、圆规等器材,以下是他们制作的过程:
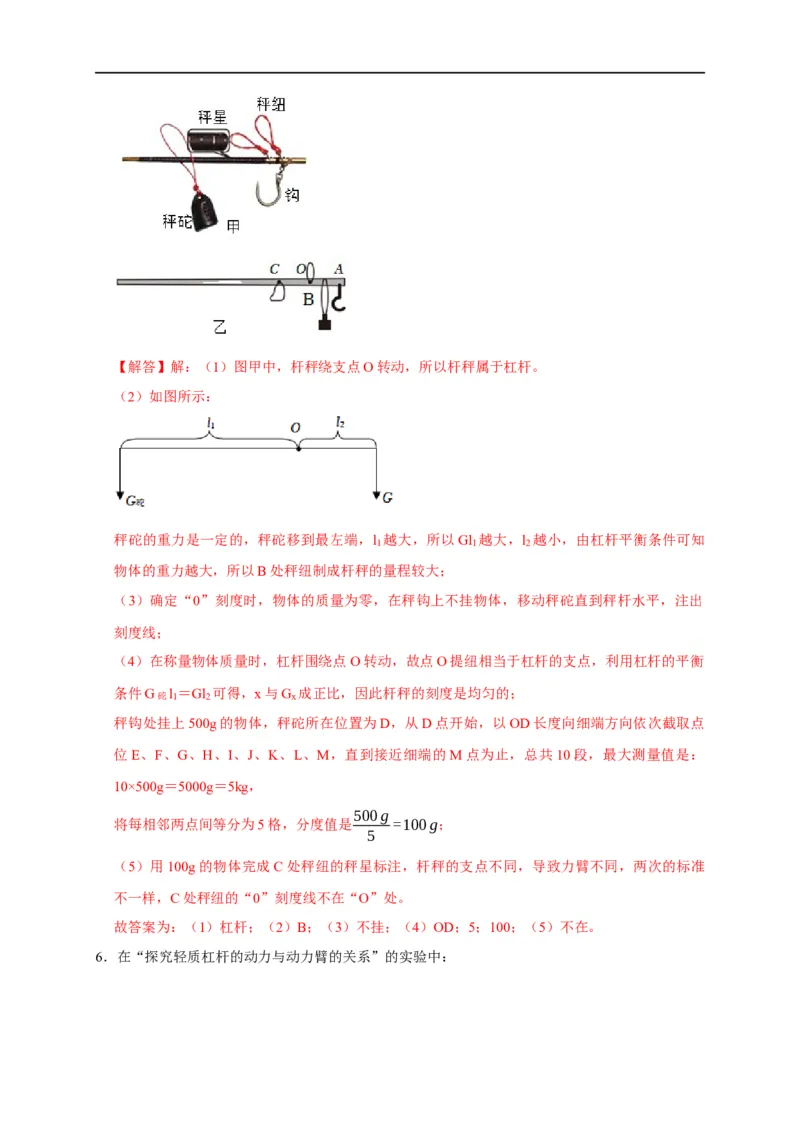
(1)小明根据图甲的构造示意图,判断杆秤属于 杠杆 (简单机械名称),爸爸将秤钩(铁
丝钩)安装在靠近粗端的A点处,如图乙所示;
(2)他们在A点左侧的适当位置钻了两个小孔B、C,用细绳作为秤纽;推测: B (B/C)
处秤纽制成杆秤的量程较大;
(3)确定“0”刻度时,他们用200g的钩码当作秤砣,在秤钩上 不挂 (挂上/不挂)物体,
提起秤纽B,移动秤砣直到杆秤水平,在秤杆的朝上面标注出刻度线(图乙中 O点);在秤钩
处挂上500g的物体,缓慢向细端移动秤砣,直到秤杆再次水平,标注出秤砣所在位置为D(图
中未标出);
(4)小明用圆规从D点开始,以 OD (OD/BD)长度向细端方向依次截取点位E、F、G、
H、I、J、K、L、M(图中均未标出),直到接近细端的M点为止;接着,又将每相邻两点间
等分为5格,给每个点位都涂上颜料作为秤星(质量刻度)。以 B为秤纽的最大测量值是 5
kg,分度值是 10 0 g;
(5)按照前面的方法,小明用100g的物体完成C处秤纽的秤星标注,请你判断该杆秤制作成
功后,C处秤纽的“0”刻度线 不在 (在/不在)“O”处,最后,他们利用已知质量的物体
对制作好的杆秤进行了校准检验,并提出具体的改进方案。【解答】解:(1)图甲中,杆秤绕支点O转动,所以杆秤属于杠杆。
(2)如图所示:
秤砣的重力是一定的,秤砣移到最左端,l 越大,所以Gl 越大,l 越小,由杠杆平衡条件可知
1 1 2
物体的重力越大,所以B处秤纽制成杆秤的量程较大;
(3)确定“0”刻度时,物体的质量为零,在秤钩上不挂物体,移动秤砣直到秤杆水平,注出
刻度线;
(4)在称量物体质量时,杠杆围绕点O转动,故点O提纽相当于杠杆的支点,利用杠杆的平衡
条件G砣l
1
=Gl
2
可得,x与G
x
成正比,因此杆秤的刻度是均匀的;
秤钩处挂上500g的物体,秤砣所在位置为D,从D点开始,以OD长度向细端方向依次截取点
位E、F、G、H、I、J、K、L、M,直到接近细端的M点为止,总共10段,最大测量值是:
10×500g=5000g=5kg,
500g
将每相邻两点间等分为5格,分度值是 =100g;
5
(5)用100g的物体完成C处秤纽的秤星标注,杆秤的支点不同,导致力臂不同,两次的标准
不一样,C处秤纽的“0”刻度线不在“O”处。
故答案为:(1)杠杆;(2)B;(3)不挂;(4)OD;5;100;(5)不在。
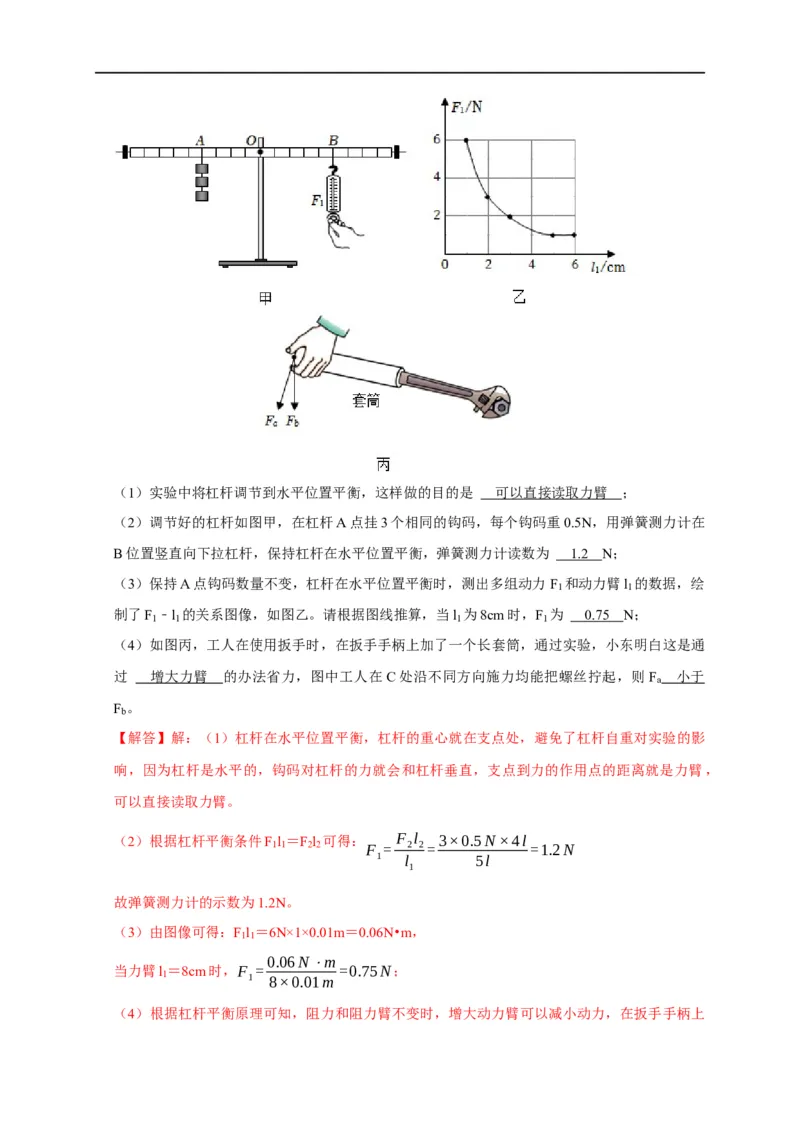
6.在“探究轻质杠杆的动力与动力臂的关系”的实验中:(1)实验中将杠杆调节到水平位置平衡,这样做的目的是 可以直接读取力臂 ;
(2)调节好的杠杆如图甲,在杠杆A点挂3个相同的钩码,每个钩码重0.5N,用弹簧测力计在
B位置竖直向下拉杠杆,保持杠杆在水平位置平衡,弹簧测力计读数为 1. 2 N;
(3)保持A点钩码数量不变,杠杆在水平位置平衡时,测出多组动力F 和动力臂l 的数据,绘
1 1
制了F ﹣l 的关系图像,如图乙。请根据图线推算,当l 为8cm时,F 为 0.7 5 N;
1 1 1 1
(4)如图丙,工人在使用扳手时,在扳手手柄上加了一个长套筒,通过实验,小东明白这是通
过 增大力臂 的办法省力,图中工人在C处沿不同方向施力均能把螺丝拧起,则 F 小于
a
F 。
b
【解答】解:(1)杠杆在水平位置平衡,杠杆的重心就在支点处,避免了杠杆自重对实验的影
响,因为杠杆是水平的,钩码对杠杆的力就会和杠杆垂直,支点到力的作用点的距离就是力臂,
可以直接读取力臂。
(2)根据杠杆平衡条件F l =F l 可得: F l 3×0.5N×4l
11 22 F = 2 2= =1.2N
1 l 5l
1
故弹簧测力计的示数为1.2N。
(3)由图像可得:F l =6N×1×0.01m=0.06N•m,
11
0.06N⋅m
当力臂l =8cm时,F = =0.75N;
1 1 8×0.01m
(4)根据杠杆平衡原理可知,阻力和阻力臂不变时,增大动力臂可以减小动力,在扳手手柄上加了一个长套筒,就是通过增大力臂来达到省力的效果。
分别做出F 、F 的力臂可知,F 的力臂大于F 的力臂,阻力和阻力臂不变,所以F 小于F 。
a b a b a b
故答案为:(1)便于直接读取力臂;(2)1.2;(3)0.75;(4)增大力臂;小于。
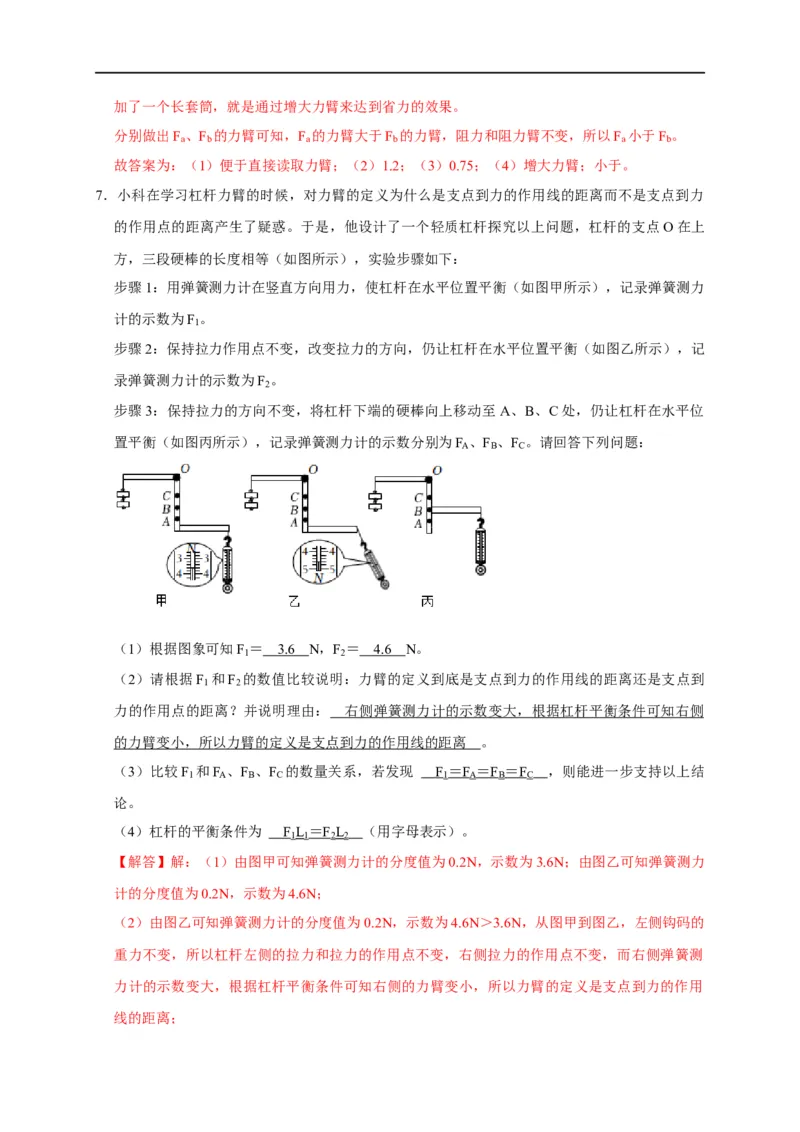
7.小科在学习杠杆力臂的时候,对力臂的定义为什么是支点到力的作用线的距离而不是支点到力
的作用点的距离产生了疑惑。于是,他设计了一个轻质杠杆探究以上问题,杠杆的支点O在上
方,三段硬棒的长度相等(如图所示),实验步骤如下:
步骤1:用弹簧测力计在竖直方向用力,使杠杆在水平位置平衡(如图甲所示),记录弹簧测力
计的示数为F 。
1
步骤2:保持拉力作用点不变,改变拉力的方向,仍让杠杆在水平位置平衡(如图乙所示),记
录弹簧测力计的示数为F 。
2
步骤3:保持拉力的方向不变,将杠杆下端的硬棒向上移动至 A、B、C处,仍让杠杆在水平位
置平衡(如图丙所示),记录弹簧测力计的示数分别为F 、F 、F 。请回答下列问题:
A B C
(1)根据图象可知F = 3. 6 N,F = 4. 6 N。
1 2
(2)请根据F 和F 的数值比较说明:力臂的定义到底是支点到力的作用线的距离还是支点到
1 2
力的作用点的距离?并说明理由: 右侧弹簧测力计的示数变大,根据杠杆平衡条件可知右侧
的力臂变小,所以力臂的定义是支点到力的作用线的距离 。
(3)比较F 和F 、F 、F 的数量关系,若发现 F = F = F = F ,则能进一步支持以上结
1 A B C 1 A B C
论。
(4)杠杆的平衡条件为 F L = F L (用字母表示)。
1 1 2 2
【解答】解:(1)由图甲可知弹簧测力计的分度值为0.2N,示数为3.6N;由图乙可知弹簧测力
计的分度值为0.2N,示数为4.6N;
(2)由图乙可知弹簧测力计的分度值为0.2N,示数为4.6N>3.6N,从图甲到图乙,左侧钩码的
重力不变,所以杠杆左侧的拉力和拉力的作用点不变,右侧拉力的作用点不变,而右侧弹簧测
力计的示数变大,根据杠杆平衡条件可知右侧的力臂变小,所以力臂的定义是支点到力的作用
线的距离;(3)从图甲到图丙中弹簧测力计对杠杆的拉力方向不变,若 F =F =F =F ,根据杠杆平衡条
1 A B C
件可知右侧的力臂不变,则能进一步支持以上结论;
(4)杠杆的平衡条件为F L =F L 。
1 1 2 2
故答案为:(1)3.6;5.4;(2)右侧弹簧测力计的示数变大,根据杠杆平衡条件可知右侧的力
臂变小,所以力臂的定义是支点到力的作用线的距离;(3)F =F =F =F ;(4)F L =
1 A B C 1 1
F L 。
2 2
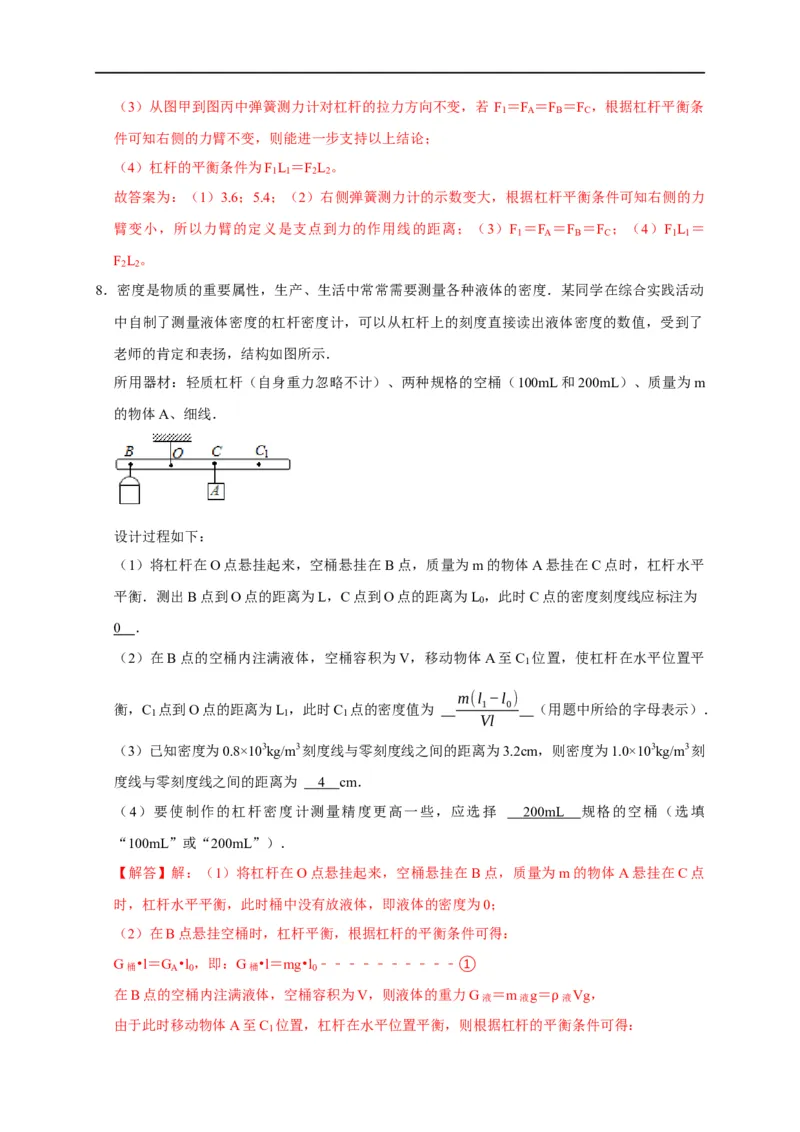
8.密度是物质的重要属性,生产、生活中常常需要测量各种液体的密度.某同学在综合实践活动
中自制了测量液体密度的杠杆密度计,可以从杠杆上的刻度直接读出液体密度的数值,受到了
老师的肯定和表扬,结构如图所示.
所用器材:轻质杠杆(自身重力忽略不计)、两种规格的空桶(100mL和200mL)、质量为m
的物体A、细线.
设计过程如下:
(1)将杠杆在O点悬挂起来,空桶悬挂在B点,质量为m的物体A悬挂在C点时,杠杆水平
平衡.测出B点到O点的距离为L,C点到O点的距离为L ,此时C点的密度刻度线应标注为
0
0 .
(2)在B点的空桶内注满液体,空桶容积为V,移动物体A至C 位置,使杠杆在水平位置平
1
m(l −l )
衡,C 点到O点的距离为L ,此时C 点的密度值为 1 0 (用题中所给的字母表示).
1 1 1
Vl
(3)已知密度为0.8×103kg/m3刻度线与零刻度线之间的距离为3.2cm,则密度为1.0×103kg/m3刻
度线与零刻度线之间的距离为 4 cm.
(4)要使制作的杠杆密度计测量精度更高一些,应选择 200mL 规格的空桶(选填
“100mL”或“200mL”).
【解答】解:(1)将杠杆在O点悬挂起来,空桶悬挂在B点,质量为m的物体A悬挂在C点
时,杠杆水平平衡,此时桶中没有放液体,即液体的密度为0;
(2)在B点悬挂空桶时,杠杆平衡,根据杠杆的平衡条件可得:
G桶 •l=G
A
•l
0
,即:G桶 •l=mg•l
0
﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣①
在B点的空桶内注满液体,空桶容积为V,则液体的重力G液 =m液g= 液Vg,
由于此时移动物体A至C
1
位置,杠杆在水平位置平衡,则根据杠杆的平ρ衡条件可得:(G桶+G液 )•l=G
A
•l
1
,即:(G桶+ 液Vg)•l=mg•l
1
﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣
② ρ
m(l −l )
由①②可得:
液
= 1 0 。
Vl
ρ
(3)已知密度为0.8×103kg/m3刻度线与零刻度线之间的距离为3.2cm,即此时的物体A的力臂
为:l′=l +3.2cm,
0
根据杠杆的平衡条件可得:(G桶+G′)•l=G
A
•l′ ,
即:(G桶+0.8×103kg/m3×Vg)•l=mg•(l
0
+3.2cm)﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣
③
当测量密度为1.0×103kg/m3的液体时,即此时的物体A的力臂为l″=l +△l,
0
根据杠杆的平衡条件可得:(G桶+G″)•l=G
A
•l″,
即:(G桶+1.0×103kg/m3×Vg)•l=mg•(l
0
+△l)﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣④
解①③④可得:△l=4cm。
(4)设物体A对杆秤的力为动力,则液体和桶对杆秤的力为阻力,根据杠杆平衡的条件F L =
1 1
F L 可得:
2 2
L F L ,在动力F 和阻力臂L 不变的情况下,“增大液体的重力,即通过增大空桶的容积”,
1= 2 2 1 2
F
1
则L 变大,即该密度秤的精确度会增大。
1
所以,应选择 200mL规格的空桶。
m(l −l )
故答案为:(1)0;(2) 1 0 ;(3)4;(4)200mL。
Vl
9.在探究“杠杆平衡条件”的实验中,研究小组的同学准备了相关的实验器材,其中包括已校准
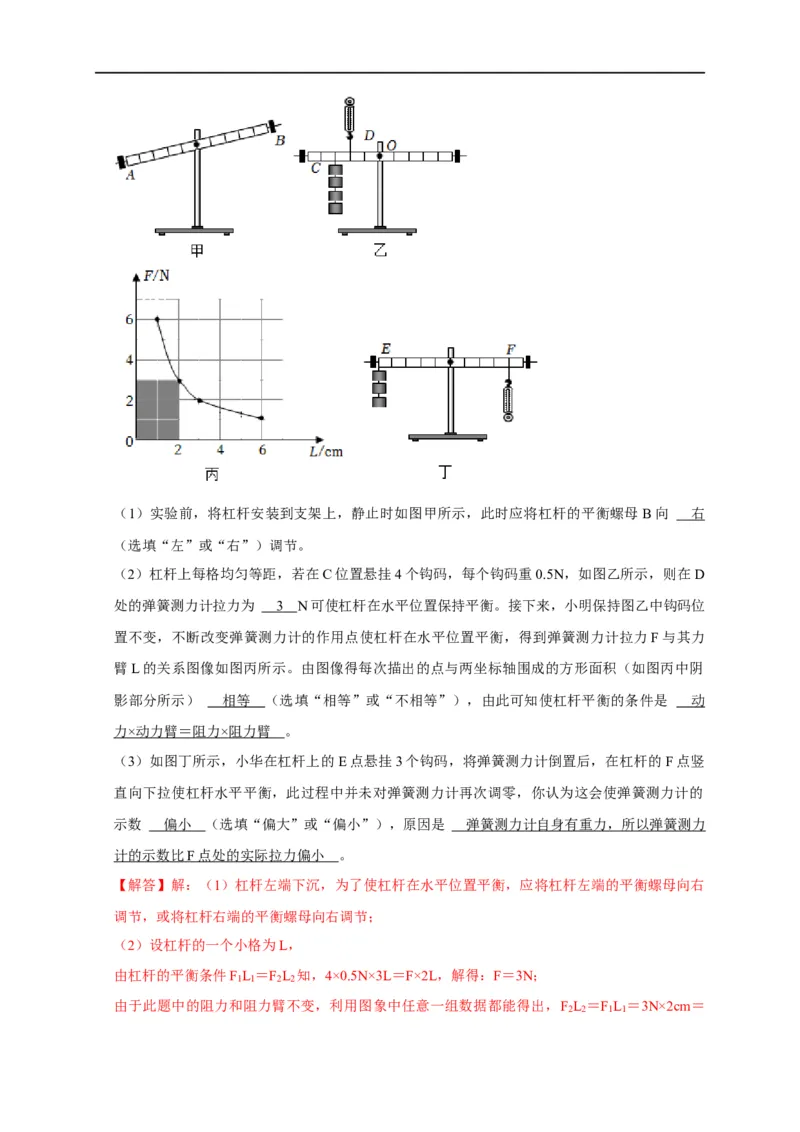
的弹簧测力计以及若干个完全相同的钩码。(1)实验前,将杠杆安装到支架上,静止时如图甲所示,此时应将杠杆的平衡螺母 B向 右
(选填“左”或“右”)调节。
(2)杠杆上每格均匀等距,若在C位置悬挂4个钩码,每个钩码重0.5N,如图乙所示,则在D
处的弹簧测力计拉力为 3 N可使杠杆在水平位置保持平衡。接下来,小明保持图乙中钩码位
置不变,不断改变弹簧测力计的作用点使杠杆在水平位置平衡,得到弹簧测力计拉力F与其力
臂L的关系图像如图丙所示。由图像得每次描出的点与两坐标轴围成的方形面积(如图丙中阴
影部分所示) 相等 (选填“相等”或“不相等”),由此可知使杠杆平衡的条件是 动
力 × 动力臂=阻力 × 阻力臂 。
(3)如图丁所示,小华在杠杆上的E点悬挂3个钩码,将弹簧测力计倒置后,在杠杆的F点竖
直向下拉使杠杆水平平衡,此过程中并未对弹簧测力计再次调零,你认为这会使弹簧测力计的
示数 偏小 (选填“偏大”或“偏小”),原因是 弹簧测力计自身有重力,所以弹簧测力
计的示数比 F 点处的实际拉力偏小 。
【解答】解:(1)杠杆左端下沉,为了使杠杆在水平位置平衡,应将杠杆左端的平衡螺母向右
调节,或将杠杆右端的平衡螺母向右调节;
(2)设杠杆的一个小格为L,
由杠杆的平衡条件F L =F L 知,4×0.5N×3L=F×2L,解得:F=3N;
1 1 2 2
由于此题中的阻力和阻力臂不变,利用图象中任意一组数据都能得出,F L =F L =3N×2cm=
2 2 1 12N×3cm=6N•cm,图像中每个点与两坐标轴围成的方形面积相等,由此可得杠杆的平衡条件,
动力×动力臂=阻力×阻力臂。
(3)由于弹簧测力计自身有重力,所以弹簧测力计的示数比F点处的实际拉力偏小,所以在弹
簧测力计进行竖直向下拉的测量时,需要重新调零。
故答案为:(1)右;(2)3;相等;动力×动力臂=阻力×阻力臂;(3)偏小;弹簧测力计自
身有重力,所以弹簧测力计的示数比F点处的实际拉力偏小。
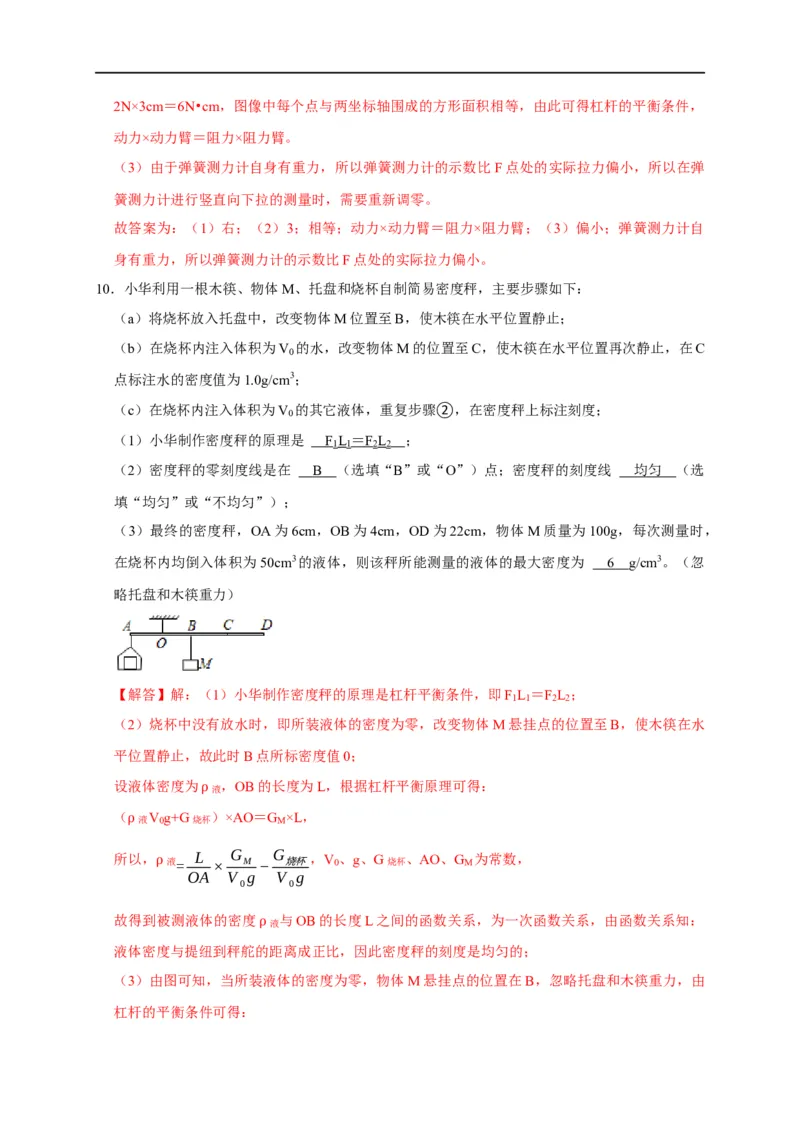
10.小华利用一根木筷、物体M、托盘和烧杯自制简易密度秤,主要步骤如下:
(a)将烧杯放入托盘中,改变物体M位置至B,使木筷在水平位置静止;
(b)在烧杯内注入体积为V 的水,改变物体M的位置至C,使木筷在水平位置再次静止,在C
0
点标注水的密度值为1.0g/cm3;
(c)在烧杯内注入体积为V 的其它液体,重复步骤②,在密度秤上标注刻度;
0
(1)小华制作密度秤的原理是 F L = F L ;
1 1 2 2
(2)密度秤的零刻度线是在 B (选填“B”或“O”)点;密度秤的刻度线 均匀 (选
填“均匀”或“不均匀”);
(3)最终的密度秤,OA为6cm,OB为4cm,OD为22cm,物体M质量为100g,每次测量时,
在烧杯内均倒入体积为50cm3的液体,则该秤所能测量的液体的最大密度为 6 g/cm3。(忽
略托盘和木筷重力)
【解答】解:(1)小华制作密度秤的原理是杠杆平衡条件,即F L =F L ;
1 1 2 2
(2)烧杯中没有放水时,即所装液体的密度为零,改变物体M悬挂点的位置至B,使木筷在水
平位置静止,故此时B点所标密度值0;
设液体密度为
液
,OB的长度为L,根据杠杆平衡原理可得:
( 液V
0
g+G烧ρ杯 )×AO=G
M
×L,
ρ
所以,
液=
L
×
G
M −
G
烧杯
,V
0
、g、G烧杯 、AO、G
M
为常数,
OA V g V g
0 0
ρ
故得到被测液体的密度
液
与OB的长度L之间的函数关系,为一次函数关系,由函数关系知:
液体密度与提纽到秤舵的ρ距离成正比,因此密度秤的刻度是均匀的;
(3)由图可知,当所装液体的密度为零,物体M悬挂点的位置在B,忽略托盘和木筷重力,由
杠杆的平衡条件可得:G烧杯×AO=m
M
g×OB,即:G烧杯×6cm=0.1kg×10N/kg×4cm,
2
所以,G烧杯 = N;
3
当物体M挂在杠杆上的D点时,该密度秤测量液体的密度最大,则
2
(G液+G烧杯 )×AO=G
M
×OD,即:(G液 + N)×6cm=0.1kg×10N/kg×22cm,
3
解得G液 =3N,
由G=mg= gV可得液体的最大密度:
ρ
液最大=
G
液 =
3N
=
6×103kg/m3=g/cm3。
gV 10N/kg×50×10−6m3
液
ρ
故答案为:(1)F L =F L ;(2)B;均匀;(4)6。
1 1 2 2

