文档内容
专题 28 杠杆
【考点分析】
章节 考点 考试题型 难易度
杠杆 选择题、填空题、作图题 ★
简单机械 杠杆的平衡 选择题、填空题、计算题 ★★★
杠杆的分类:省力杠杆、费力杠杆、等臂杠杆 选择题、填空题 ★★
【知识点总结+例题讲解】
一、杠杆:
1.定义:一根硬棒,在力的作用下能绕着 固定点 转动,这根硬棒就叫杠杆。
(1)“硬棒”不一定是棒,泛指有一定长度的,在外力作用下不变形的物体;
(2)杠杆可以是直的,也可以是任何形状的。
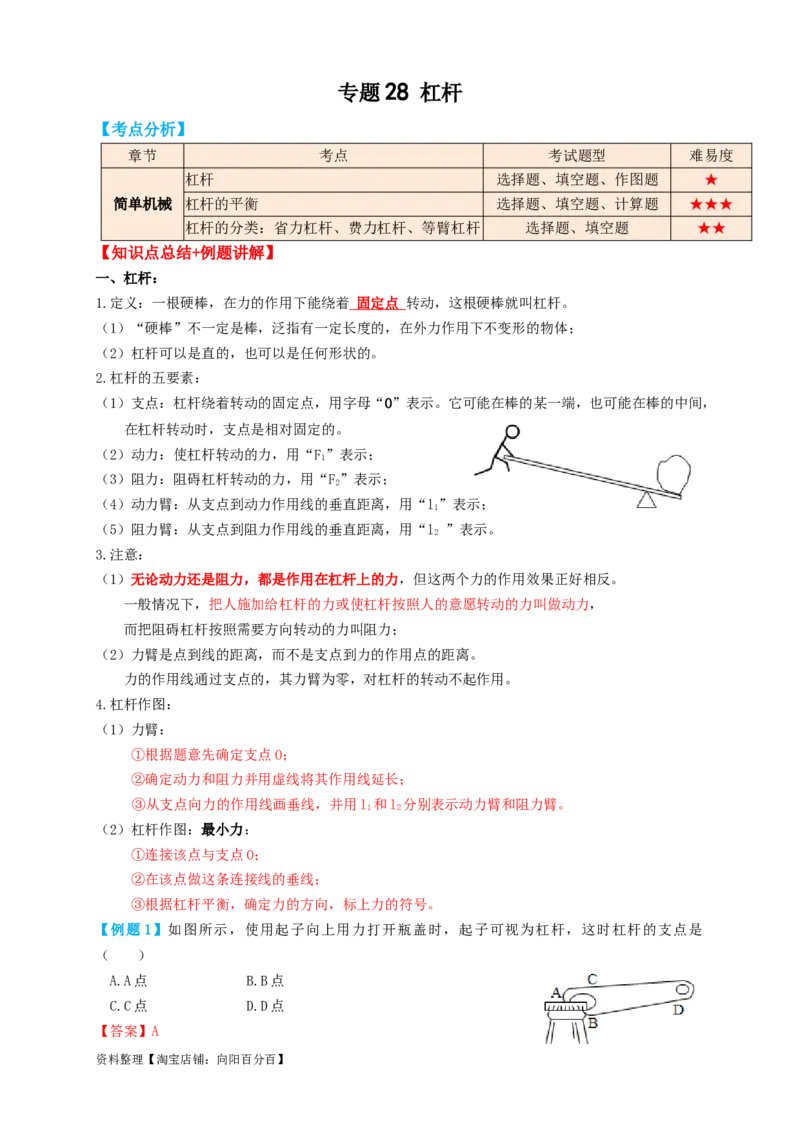
2.杠杆的五要素:
(1)支点:杠杆绕着转动的固定点,用字母“O”表示。它可能在棒的某一端,也可能在棒的中间,
在杠杆转动时,支点是相对固定的。
(2)动力:使杠杆转动的力,用“F”表示;
1
(3)阻力:阻碍杠杆转动的力,用“F”表示;
2
(4)动力臂:从支点到动力作用线的垂直距离,用“l”表示;
1
(5)阻力臂:从支点到阻力作用线的垂直距离,用“l ”表示。
2
3.注意:
(1)无论动力还是阻力,都是作用在杠杆上的力,但这两个力的作用效果正好相反。
一般情况下,把人施加给杠杆的力或使杠杆按照人的意愿转动的力叫做动力,
而把阻碍杠杆按照需要方向转动的力叫阻力;
(2)力臂是点到线的距离,而不是支点到力的作用点的距离。
力的作用线通过支点的,其力臂为零,对杠杆的转动不起作用。
4.杠杆作图:
(1)力臂:
①根据题意先确定支点O;
②确定动力和阻力并用虚线将其作用线延长;
③从支点向力的作用线画垂线,并用l 和l 分别表示动力臂和阻力臂。
1 2
(2)杠杆作图:最小力:
①连接该点与支点O;
②在该点做这条连接线的垂线;
③根据杠杆平衡,确定力的方向,标上力的符号。
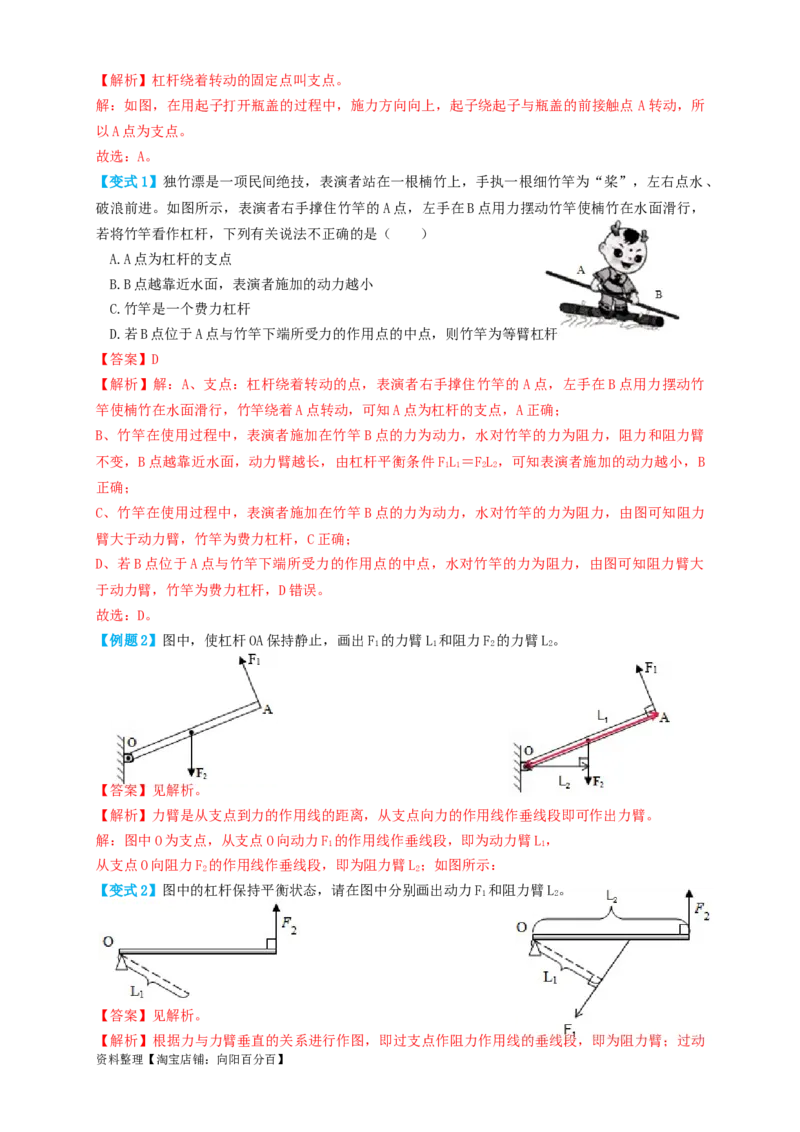
【例题 1】如图所示,使用起子向上用力打开瓶盖时,起子可视为杠杆,这时杠杆的支点是
( )
A.A点 B.B点
C.C点 D.D点
【答案】A
资料整理【淘宝店铺:向阳百分百】【解析】杠杆绕着转动的固定点叫支点。
解:如图,在用起子打开瓶盖的过程中,施力方向向上,起子绕起子与瓶盖的前接触点 A转动,所
以A点为支点。
故选:A。
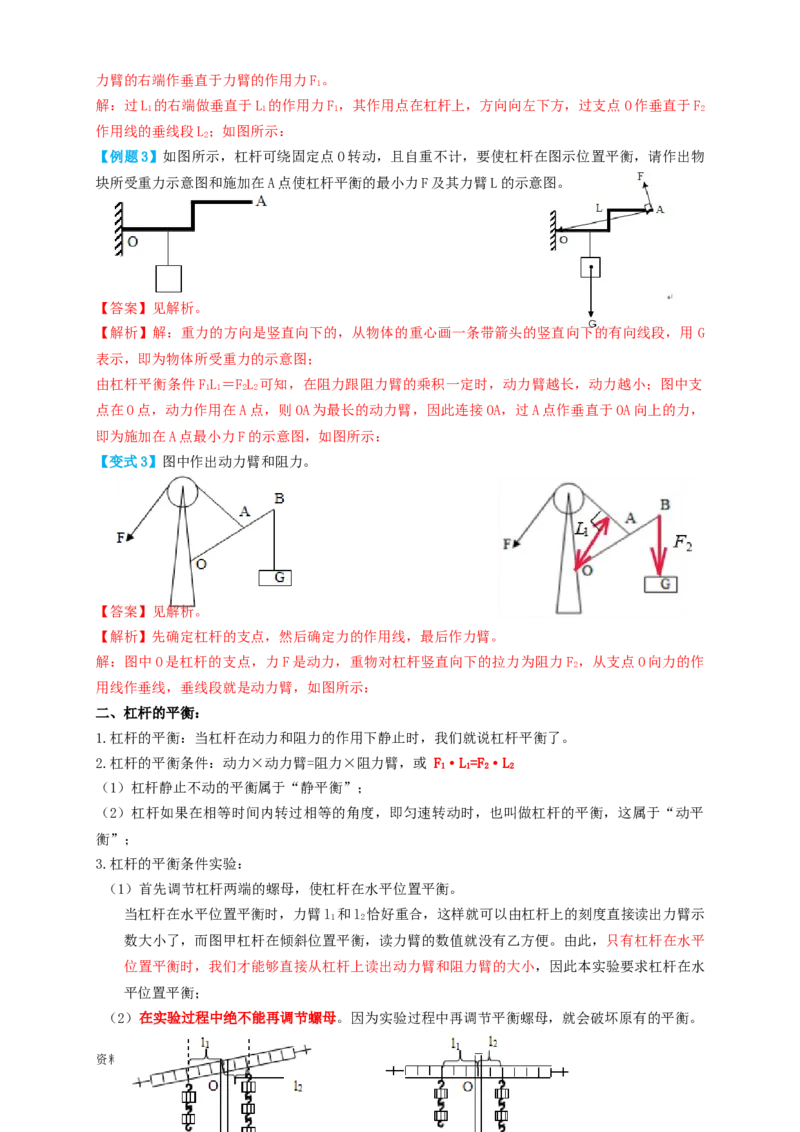
【变式1】独竹漂是一项民间绝技,表演者站在一根楠竹上,手执一根细竹竿为“桨”,左右点水、
破浪前进。如图所示,表演者右手撑住竹竿的A点,左手在B点用力摆动竹竿使楠竹在水面滑行,
若将竹竿看作杠杆,下列有关说法不正确的是( )
A.A点为杠杆的支点
B.B点越靠近水面,表演者施加的动力越小
C.竹竿是一个费力杠杆
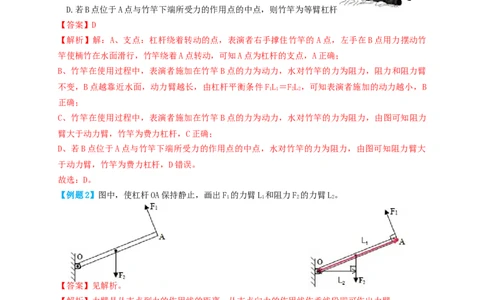
D.若B点位于A点与竹竿下端所受力的作用点的中点,则竹竿为等臂杠杆
【答案】D
【解析】解:A、支点:杠杆绕着转动的点,表演者右手撑住竹竿的 A点,左手在B点用力摆动竹
竿使楠竹在水面滑行,竹竿绕着A点转动,可知A点为杠杆的支点,A正确;
B、竹竿在使用过程中,表演者施加在竹竿B点的力为动力,水对竹竿的力为阻力,阻力和阻力臂
不变,B点越靠近水面,动力臂越长,由杠杆平衡条件FL =FL ,可知表演者施加的动力越小,B
1 1 2 2
正确;
C、竹竿在使用过程中,表演者施加在竹竿B点的力为动力,水对竹竿的力为阻力,由图可知阻力
臂大于动力臂,竹竿为费力杠杆,C正确;
D、若B点位于A点与竹竿下端所受力的作用点的中点,水对竹竿的力为阻力,由图可知阻力臂大
于动力臂,竹竿为费力杠杆,D错误。
故选:D。
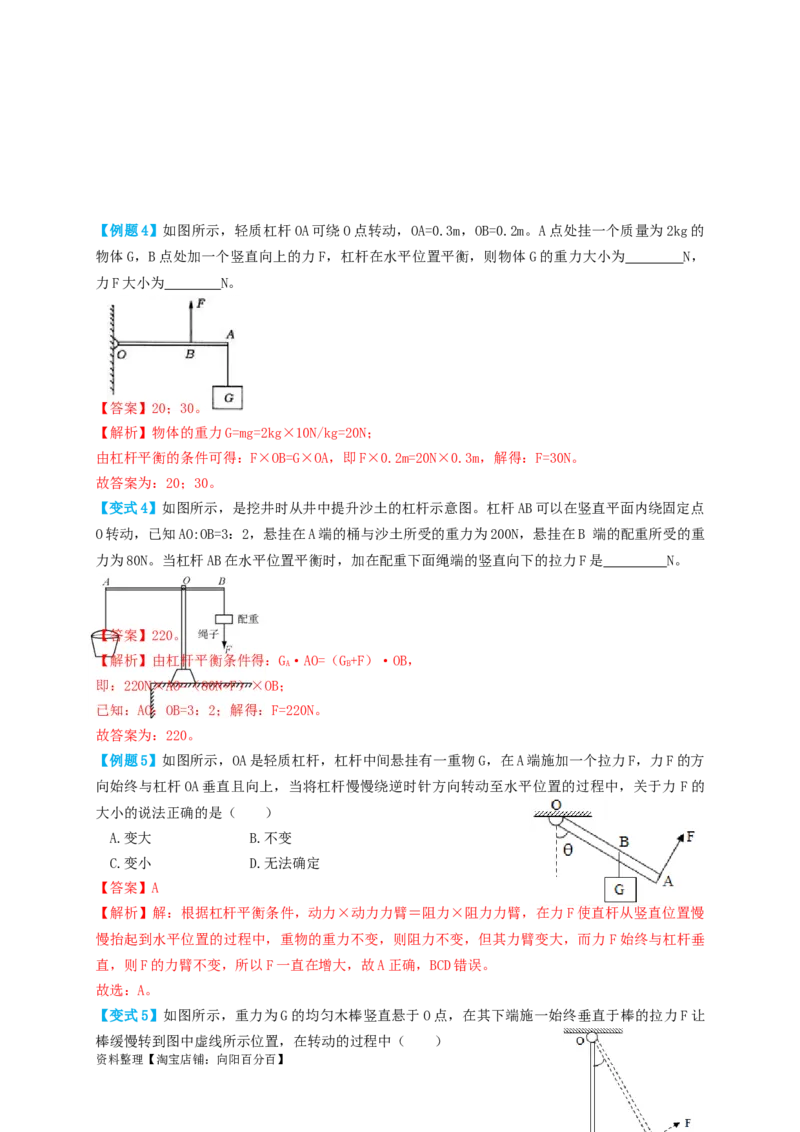
【例题2】图中,使杠杆OA保持静止,画出F 的力臂L 和阻力F 的力臂L。
1 1 2 2
【答案】见解析。
【解析】力臂是从支点到力的作用线的距离,从支点向力的作用线作垂线段即可作出力臂。
解:图中O为支点,从支点O向动力F 的作用线作垂线段,即为动力臂L,
1 1
从支点O向阻力F 的作用线作垂线段,即为阻力臂L;如图所示:
2 2
【变式2】图中的杠杆保持平衡状态,请在图中分别画出动力F 和阻力臂L。
1 2
【答案】见解析。
【解析】根据力与力臂垂直的关系进行作图,即过支点作阻力作用线的垂线段,即为阻力臂;过动
资料整理【淘宝店铺:向阳百分百】力臂的右端作垂直于力臂的作用力F。
1
解:过L 的右端做垂直于L 的作用力F,其作用点在杠杆上,方向向左下方,过支点O作垂直于F
1 1 1 2
作用线的垂线段L;如图所示:
2
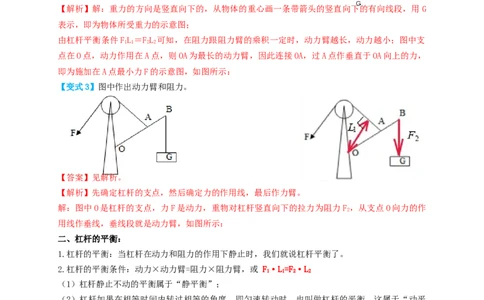
【例题3】如图所示,杠杆可绕固定点O转动,且自重不计,要使杠杆在图示位置平衡,请作出物
块所受重力示意图和施加在A点使杠杆平衡的最小力F及其力臂L的示意图。
【答案】见解析。
【解析】解:重力的方向是竖直向下的,从物体的重心画一条带箭头的竖直向下的有向线段,用 G
表示,即为物体所受重力的示意图;
由杠杆平衡条件FL =FL 可知,在阻力跟阻力臂的乘积一定时,动力臂越长,动力越小;图中支
1 1 2 2
点在O点,动力作用在A点,则OA为最长的动力臂,因此连接OA,过A点作垂直于OA向上的力,
即为施加在A点最小力F的示意图,如图所示:
【变式3】图中作出动力臂和阻力。
【答案】见解析。
【解析】先确定杠杆的支点,然后确定力的作用线,最后作力臂。
解:图中O是杠杆的支点,力F是动力,重物对杠杆竖直向下的拉力为阻力F ,从支点O向力的作
2
用线作垂线,垂线段就是动力臂,如图所示:
二、杠杆的平衡:
1.杠杆的平衡:当杠杆在动力和阻力的作用下静止时,我们就说杠杆平衡了。
2.杠杆的平衡条件:动力×动力臂=阻力×阻力臂,或 F·L=F·L
1 1 2 2
(1)杠杆静止不动的平衡属于“静平衡”;
(2)杠杆如果在相等时间内转过相等的角度,即匀速转动时,也叫做杠杆的平衡,这属于“动平
衡”;
3.杠杆的平衡条件实验:
(1)首先调节杠杆两端的螺母,使杠杆在水平位置平衡。
当杠杆在水平位置平衡时,力臂l 和l 恰好重合,这样就可以由杠杆上的刻度直接读出力臂示
1 2
数大小了,而图甲杠杆在倾斜位置平衡,读力臂的数值就没有乙方便。由此,只有杠杆在水平
位置平衡时,我们才能够直接从杠杆上读出动力臂和阻力臂的大小,因此本实验要求杠杆在水
平位置平衡;
(2)在实验过程中绝不能再调节螺母。因为实验过程中再调节平衡螺母,就会破坏原有的平衡。
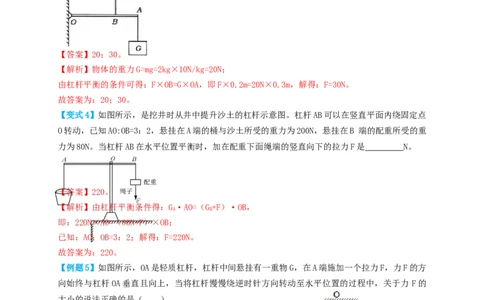
资料整理【淘宝店铺:向阳百分百】【例题4】如图所示,轻质杠杆OA可绕O点转动,OA=0.3m,OB=0.2m。A点处挂一个质量为2kg的
物体G,B点处加一个竖直向上的力F,杠杆在水平位置平衡,则物体G的重力大小为 N,
力F大小为 N。
【答案】20;30。
【解析】物体的重力G=mg=2kg×10N/kg=20N;
由杠杆平衡的条件可得:F×OB=G×OA,即F×0.2m=20N×0.3m,解得:F=30N。
故答案为:20;30。
【变式4】如图所示,是挖井时从井中提升沙土的杠杆示意图。杠杆AB可以在竖直平面内绕固定点
O转动,已知AO:OB=3:2,悬挂在A端的桶与沙土所受的重力为200N,悬挂在B 端的配重所受的重
力为80N。当杠杆AB在水平位置平衡时,加在配重下面绳端的竖直向下的拉力F是 N。
【答案】220。
【解析】由杠杆平衡条件得:G·AO=(G+F)·OB,
A B
即:220N×AO=(80N+F)×OB;
已知:AO:OB=3:2;解得:F=220N。
故答案为:220。
【例题5】如图所示,OA是轻质杠杆,杠杆中间悬挂有一重物G,在A端施加一个拉力F,力F的方
向始终与杠杆OA垂直且向上,当将杠杆慢慢绕逆时针方向转动至水平位置的过程中,关于力 F的
大小的说法正确的是( )
A.变大 B.不变
C.变小 D.无法确定
【答案】A
【解析】解:根据杠杆平衡条件,动力×动力力臂=阻力×阻力力臂,在力F使直杆从竖直位置慢
慢抬起到水平位置的过程中,重物的重力不变,则阻力不变,但其力臂变大,而力 F始终与杠杆垂
直,则F的力臂不变,所以F一直在增大,故A正确,BCD错误。
故选:A。
【变式5】如图所示,重力为G的均匀木棒竖直悬于O点,在其下端施一始终垂直于棒的拉力F让
棒缓慢转到图中虚线所示位置,在转动的过程中( )
资料整理【淘宝店铺:向阳百分百】A.动力F逐渐变大
B.动力F逐渐变小
C.动力F一直不变
D.无法确定动力F大小
【答案】A
【解析】解:将杠杆缓慢地由最初位置拉到图中虚线所示位置,拉力F始终垂直于棒,则动力臂不
变;阻力为杠杆的重力,其大小不变,当硬棒在竖直位置时,重力的力臂为 0,转过一定角后,重
力的力臂(阻力臂)逐渐变大;因阻力(即重力)不变,阻力臂变大,动力臂不变,所以,由杠杆
的平衡条件Fl=Fl 可知,动力F变大,故A正确。
1 1 2 2
故选:A。
三、杠杆分类:
1.省力杠杆:动力臂l>阻力臂l,则平衡时F<F;
1 2 1 2
这种杠杆使用时可省力(即用较小的动力就可以克服较大的阻力),但却费了距离(即动力作用
点移动的距离大于阻力作用点移动的距离,并且比不使用杠杆,力直接作用在物体上移动的距离
大)。
2.费力杠杆:动力臂l<阻力臂l,则平衡时F>F;
1 2 1 2
这种杠杆叫做费力杠杆。使用费力杠杆时虽然费了力(动力大于阻力),但却省距离(可使动力
作用点比阻力作用点少移动距离)。
3.等臂杠杆:动力臂l=阻力臂l,则平衡时F=F;
1 2 1 2
这种杠杆叫做等臂杠杆。使用这种杠杆既不省力,也不费力,即不省距离也不费距离。
4.既省力又省距离的杠杆时不存在的。
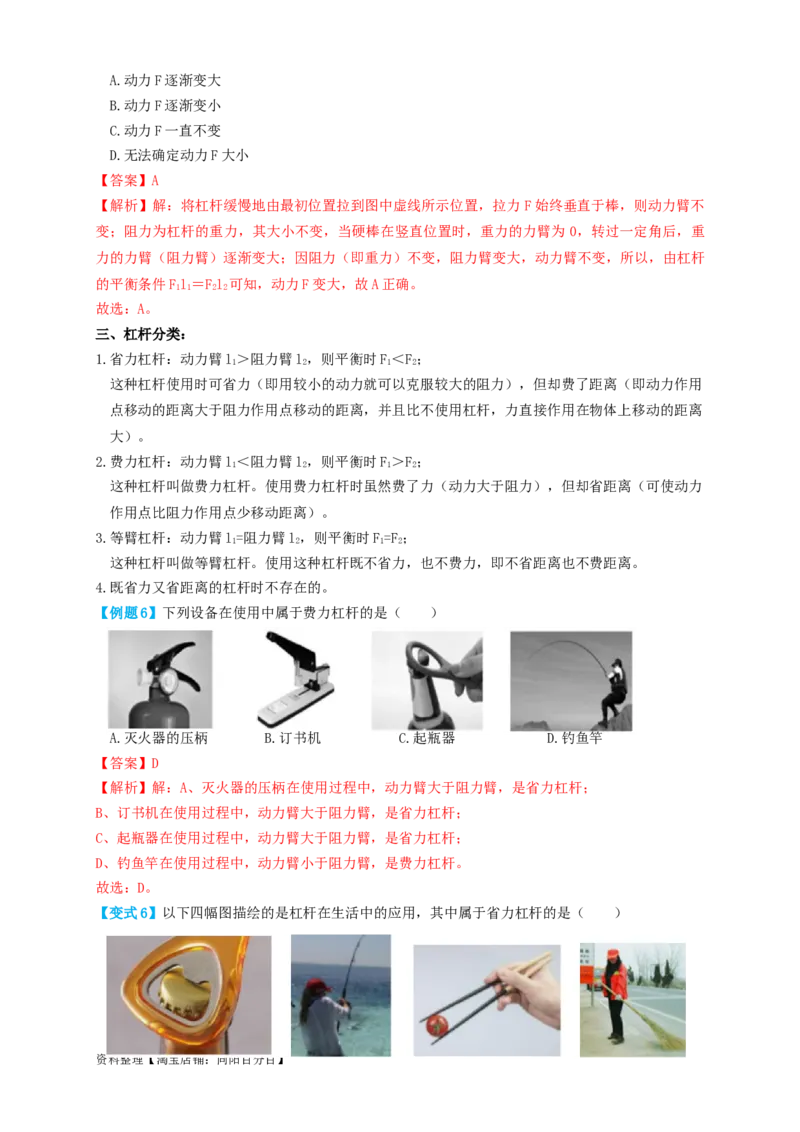
【例题6】下列设备在使用中属于费力杠杆的是( )
A.灭火器的压柄 B.订书机 C.起瓶器 D.钓鱼竿
【答案】D
【解析】解:A、灭火器的压柄在使用过程中,动力臂大于阻力臂,是省力杠杆;
B、订书机在使用过程中,动力臂大于阻力臂,是省力杠杆;
C、起瓶器在使用过程中,动力臂大于阻力臂,是省力杠杆;
D、钓鱼竿在使用过程中,动力臂小于阻力臂,是费力杠杆。
故选:D。
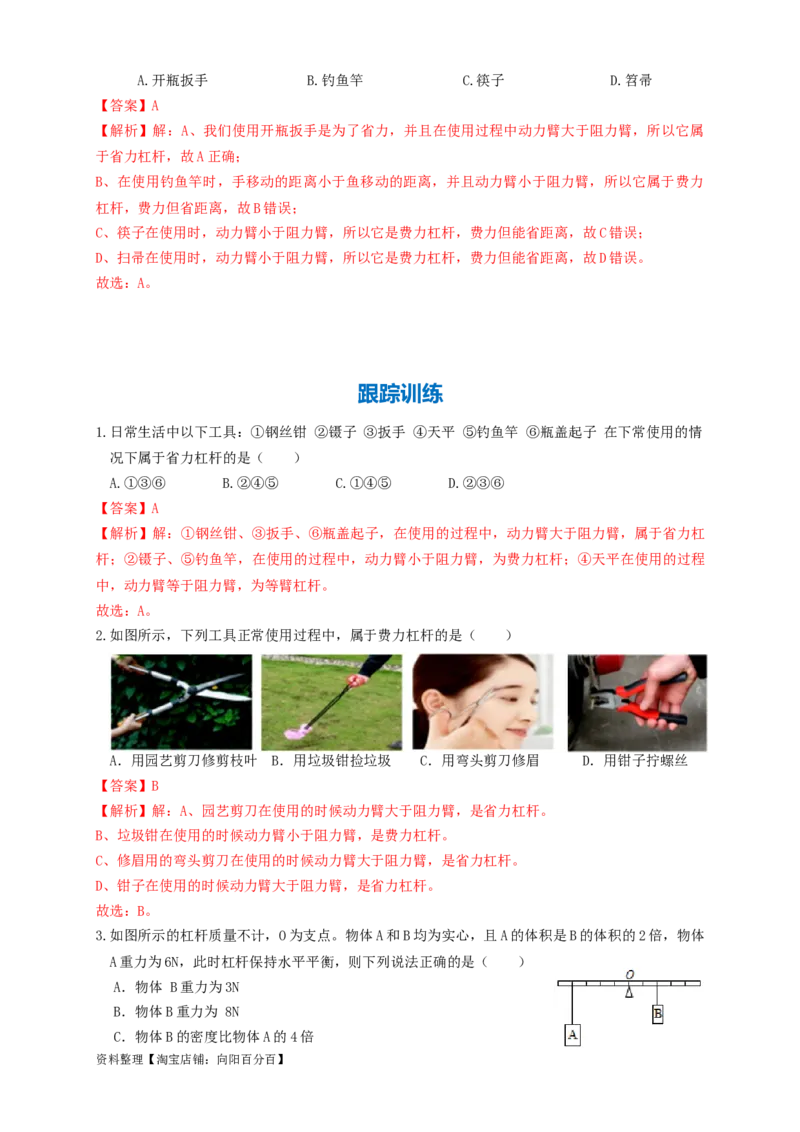
【变式6】以下四幅图描绘的是杠杆在生活中的应用,其中属于省力杠杆的是( )
资料整理【淘宝店铺:向阳百分百】A.开瓶扳手 B.钓鱼竿 C.筷子 D.笤帚
【答案】A
【解析】解:A、我们使用开瓶扳手是为了省力,并且在使用过程中动力臂大于阻力臂,所以它属
于省力杠杆,故A正确;
B、在使用钓鱼竿时,手移动的距离小于鱼移动的距离,并且动力臂小于阻力臂,所以它属于费力
杠杆,费力但省距离,故B错误;
C、筷子在使用时,动力臂小于阻力臂,所以它是费力杠杆,费力但能省距离,故C错误;
D、扫帚在使用时,动力臂小于阻力臂,所以它是费力杠杆,费力但能省距离,故D错误。
故选:A。
跟踪训练
1.日常生活中以下工具:①钢丝钳 ②镊子 ③扳手 ④天平 ⑤钓鱼竿 ⑥瓶盖起子 在下常使用的情
况下属于省力杠杆的是( )
A.①③⑥ B.②④⑤ C.①④⑤ D.②③⑥
【答案】A
【解析】解:①钢丝钳、③扳手、⑥瓶盖起子,在使用的过程中,动力臂大于阻力臂,属于省力杠
杆;②镊子、⑤钓鱼竿,在使用的过程中,动力臂小于阻力臂,为费力杠杆;④天平在使用的过程
中,动力臂等于阻力臂,为等臂杠杆。
故选:A。
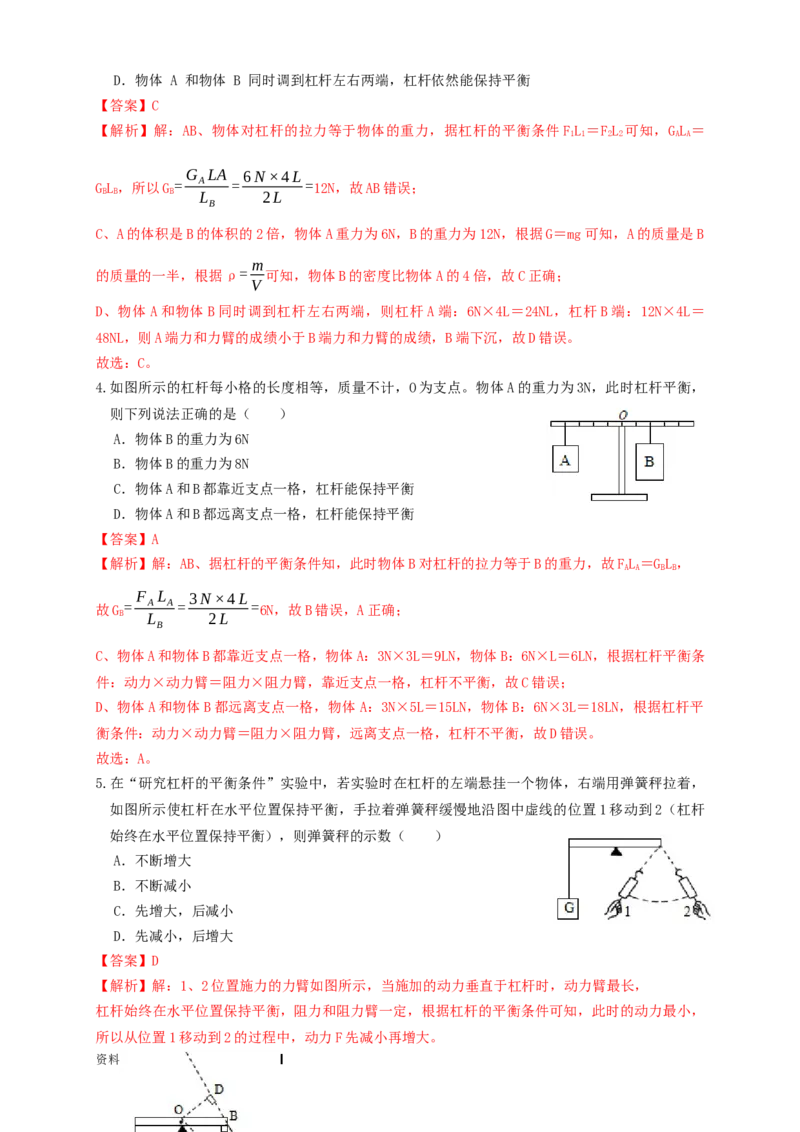
2.如图所示,下列工具正常使用过程中,属于费力杠杆的是( )
A.用园艺剪刀修剪枝叶 B.用垃圾钳捡垃圾 C.用弯头剪刀修眉 D.用钳子拧螺丝
【答案】B
【解析】解:A、园艺剪刀在使用的时候动力臂大于阻力臂,是省力杠杆。
B、垃圾钳在使用的时候动力臂小于阻力臂,是费力杠杆。
C、修眉用的弯头剪刀在使用的时候动力臂大于阻力臂,是省力杠杆。
D、钳子在使用的时候动力臂大于阻力臂,是省力杠杆。
故选:B。
3.如图所示的杠杆质量不计,O为支点。物体A和B均为实心,且A的体积是B的体积的2倍,物体
A重力为6N,此时杠杆保持水平平衡,则下列说法正确的是( )
A.物体 B重力为3N
B.物体B重力为 8N
C.物体B的密度比物体A的4倍
资料整理【淘宝店铺:向阳百分百】D.物体 A 和物体 B 同时调到杠杆左右两端,杠杆依然能保持平衡
【答案】C
【解析】解:AB、物体对杠杆的拉力等于物体的重力,据杠杆的平衡条件FL =FL 可知,GL =
1 1 2 2 A A
G LA 6N×4L
GL,所以G = A = =12N,故AB错误;
B B B L 2L
B
C、A的体积是B的体积的2倍,物体A重力为6N,B的重力为12N,根据G=mg可知,A的质量是B
m
的质量的一半,根据ρ= 可知,物体B的密度比物体A的4倍,故C正确;
V
D、物体A和物体B同时调到杠杆左右两端,则杠杆A端:6N×4L=24NL,杠杆B端:12N×4L=
48NL,则A端力和力臂的成绩小于B端力和力臂的成绩,B端下沉,故D错误。
故选:C。
4.如图所示的杠杆每小格的长度相等,质量不计,O为支点。物体A的重力为3N,此时杠杆平衡,
则下列说法正确的是( )
A.物体B的重力为6N
B.物体B的重力为8N
C.物体A和B都靠近支点一格,杠杆能保持平衡
D.物体A和B都远离支点一格,杠杆能保持平衡
【答案】A
【解析】解:AB、据杠杆的平衡条件知,此时物体B对杠杆的拉力等于B的重力,故FL=GL,
A A B B
F L 3N×4L
故G = A A = =6N,故B错误,A正确;
B L 2L
B
C、物体A和物体B都靠近支点一格,物体A:3N×3L=9LN,物体B:6N×L=6LN,根据杠杆平衡条
件:动力×动力臂=阻力×阻力臂,靠近支点一格,杠杆不平衡,故C错误;
D、物体A和物体B都远离支点一格,物体A:3N×5L=15LN,物体B:6N×3L=18LN,根据杠杆平
衡条件:动力×动力臂=阻力×阻力臂,远离支点一格,杠杆不平衡,故D错误。
故选:A。
5.在“研究杠杆的平衡条件”实验中,若实验时在杠杆的左端悬挂一个物体,右端用弹簧秤拉着,
如图所示使杠杆在水平位置保持平衡,手拉着弹簧秤缓慢地沿图中虚线的位置1移动到2(杠杆
始终在水平位置保持平衡),则弹簧秤的示数( )
A.不断增大
B.不断减小
C.先增大,后减小
D.先减小,后增大
【答案】D
【解析】解:1、2位置施力的力臂如图所示,当施加的动力垂直于杠杆时,动力臂最长,
杠杆始终在水平位置保持平衡,阻力和阻力臂一定,根据杠杆的平衡条件可知,此时的动力最小,
所以从位置1移动到2的过程中,动力F先减小再增大。
资料整理【淘宝店铺:向阳百分百】故选:D。
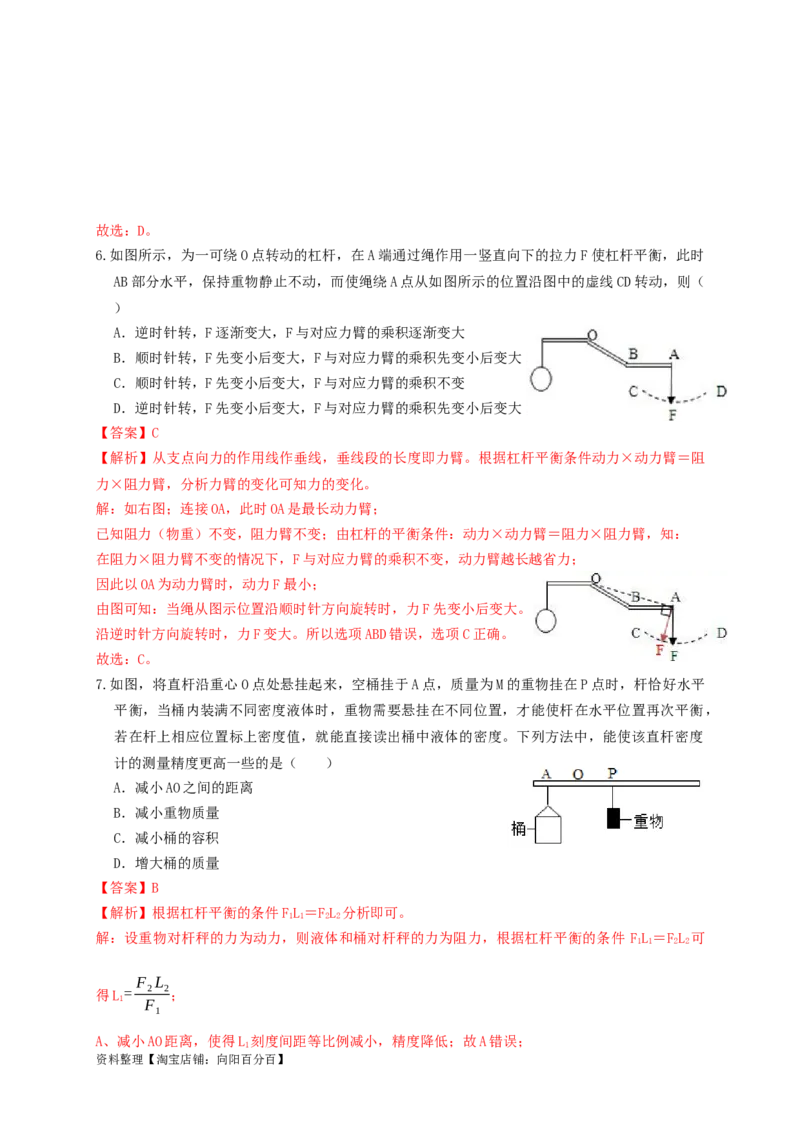
6.如图所示,为一可绕O点转动的杠杆,在A端通过绳作用一竖直向下的拉力F使杠杆平衡,此时
AB部分水平,保持重物静止不动,而使绳绕A点从如图所示的位置沿图中的虚线CD转动,则(
)
A.逆时针转,F逐渐变大,F与对应力臂的乘积逐渐变大
B.顺时针转,F先变小后变大,F与对应力臂的乘积先变小后变大
C.顺时针转,F先变小后变大,F与对应力臂的乘积不变
D.逆时针转,F先变小后变大,F与对应力臂的乘积先变小后变大
【答案】C
【解析】从支点向力的作用线作垂线,垂线段的长度即力臂。根据杠杆平衡条件动力×动力臂=阻
力×阻力臂,分析力臂的变化可知力的变化。
解:如右图;连接OA,此时OA是最长动力臂;
已知阻力(物重)不变,阻力臂不变;由杠杆的平衡条件:动力×动力臂=阻力×阻力臂,知:
在阻力×阻力臂不变的情况下,F与对应力臂的乘积不变,动力臂越长越省力;
因此以OA为动力臂时,动力F最小;
由图可知:当绳从图示位置沿顺时针方向旋转时,力F先变小后变大。
沿逆时针方向旋转时,力F变大。所以选项ABD错误,选项C正确。
故选:C。
7.如图,将直杆沿重心O点处悬挂起来,空桶挂于A点,质量为M的重物挂在P点时,杆恰好水平
平衡,当桶内装满不同密度液体时,重物需要悬挂在不同位置,才能使杆在水平位置再次平衡,
若在杆上相应位置标上密度值,就能直接读出桶中液体的密度。下列方法中,能使该直杆密度
计的测量精度更高一些的是( )
A.减小AO之间的距离
B.减小重物质量
C.减小桶的容积
D.增大桶的质量
【答案】B
【解析】根据杠杆平衡的条件FL=FL 分析即可。
1 1 2 2
解:设重物对杆秤的力为动力,则液体和桶对杆秤的力为阻力,根据杠杆平衡的条件 FL =FL 可
1 1 2 2
F L
得L = 2 2 ;
1 F
1
A、减小AO距离,使得L 刻度间距等比例减小,精度降低;故A错误;
1
资料整理【淘宝店铺:向阳百分百】B、减小重物,使得L 刻度间隔等比例增大;故B正确;
1
C、减小容积,使密度改变时F 变化更小,即L 刻度间隔变小;故C错误;
2 1
D、增大桶重,虽然使L 总体变大,但密度变化带来影响变小,刻度间隔没有明显变化,故D错误。
1
故选:B。
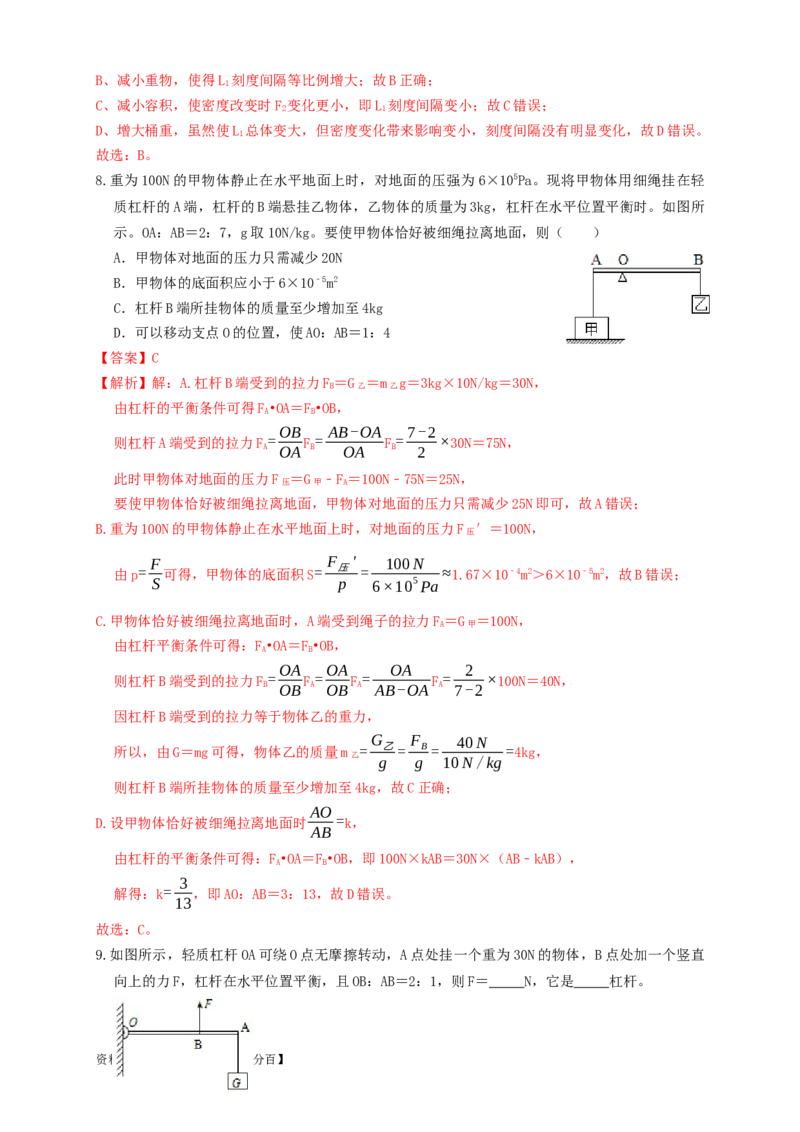
8.重为100N的甲物体静止在水平地面上时,对地面的压强为6×105Pa。现将甲物体用细绳挂在轻
质杠杆的A端,杠杆的B端悬挂乙物体,乙物体的质量为3kg,杠杆在水平位置平衡时。如图所
示。OA:AB=2:7,g取10N/kg。要使甲物体恰好被细绳拉离地面,则( )
A.甲物体对地面的压力只需减少20N
B.甲物体的底面积应小于6×10﹣5m2
C.杠杆B端所挂物体的质量至少增加至4kg
D.可以移动支点O的位置,使AO:AB=1:4
【答案】C
【解析】解:A.杠杆B端受到的拉力F=G =m g=3kg×10N/kg=30N,
B 乙 乙
由杠杆的平衡条件可得F•OA=F•OB,
A B
OB AB-OA 7-2
则杠杆A端受到的拉力F = F = F = ×30N=75N,
A OA B OA B 2
此时甲物体对地面的压力F =G ﹣F=100N﹣75N=25N,
压 甲 A
要使甲物体恰好被细绳拉离地面,甲物体对地面的压力只需减少25N即可,故A错误;
B.重为100N的甲物体静止在水平地面上时,对地面的压力F ′=100N,
压
F F ' 100N
由p= 可得,甲物体的底面积S= 压 = ≈1.67×10﹣4m2>6×10﹣5m2,故B错误;
S p 6×105Pa
C.甲物体恰好被细绳拉离地面时,A端受到绳子的拉力F=G =100N,
A 甲
由杠杆平衡条件可得:F•OA=F•OB,
A B
OA OA OA 2
则杠杆B端受到的拉力F = F = F = F = ×100N=40N,
B OB A OB A AB-OA A 7-2
因杠杆B端受到的拉力等于物体乙的重力,
G F 40N
所以,由G=mg可得,物体乙的质量m = 乙= B= =4kg,
乙 g g 10N/kg
则杠杆B端所挂物体的质量至少增加至4kg,故C正确;
AO
D.设甲物体恰好被细绳拉离地面时 =k,
AB
由杠杆的平衡条件可得:F•OA=F•OB,即100N×kAB=30N×(AB﹣kAB),
A B
3
解得:k= ,即AO:AB=3:13,故D错误。
13
故选:C。
9.如图所示,轻质杠杆OA可绕O点无摩擦转动,A点处挂一个重为30N的物体,B点处加一个竖直
向上的力F,杠杆在水平位置平衡,且OB:AB=2:1,则F= N,它是 杠杆。
资料整理【淘宝店铺:向阳百分百】【答案】45;费力。
【解析】解:因为OB:AB=2:1,所以OB:OA=OB:(OB+AB)=2:(2+1)=2:3,
G⋅OA 30N×3
由杠杆平衡的条件可得:F•OB=G•OA,则:F= = =45N;
OB 2
因为F>G,所以此杠杆为费力杠杆。
故答案为:45;费力。
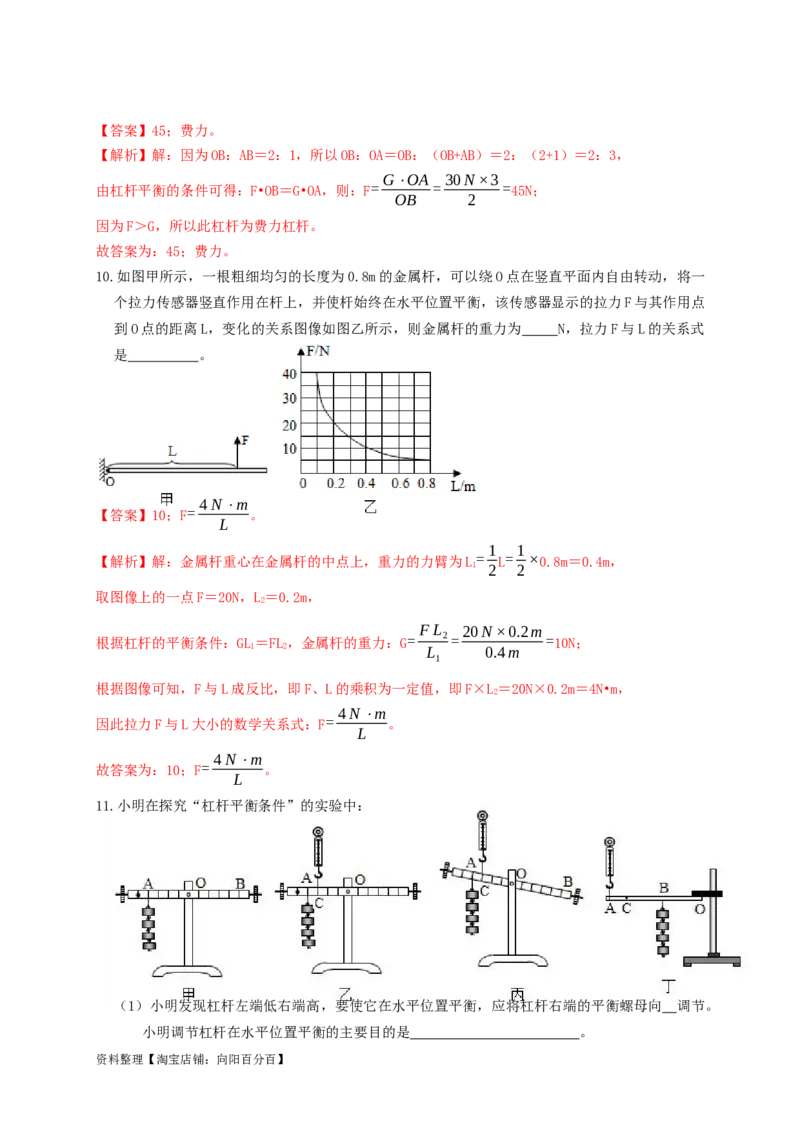
10.如图甲所示,一根粗细均匀的长度为0.8m的金属杆,可以绕O点在竖直平面内自由转动,将一
个拉力传感器竖直作用在杆上,并使杆始终在水平位置平衡,该传感器显示的拉力F与其作用点
到O点的距离L,变化的关系图像如图乙所示,则金属杆的重力为 N,拉力F与L的关系式
是 。
4N⋅m
【答案】10;F= 。
L
1 1
【解析】解:金属杆重心在金属杆的中点上,重力的力臂为L = L= ×0.8m=0.4m,
1 2 2
取图像上的一点F=20N,L=0.2m,
2
FL 20N×0.2m
根据杠杆的平衡条件:GL=FL,金属杆的重力:G= 2= =10N;
1 2 L 0.4m
1
根据图像可知,F与L成反比,即F、L的乘积为一定值,即F×L=20N×0.2m=4N•m,
2
4N⋅m
因此拉力F与L大小的数学关系式:F= 。
L
4N⋅m
故答案为:10;F= 。
L
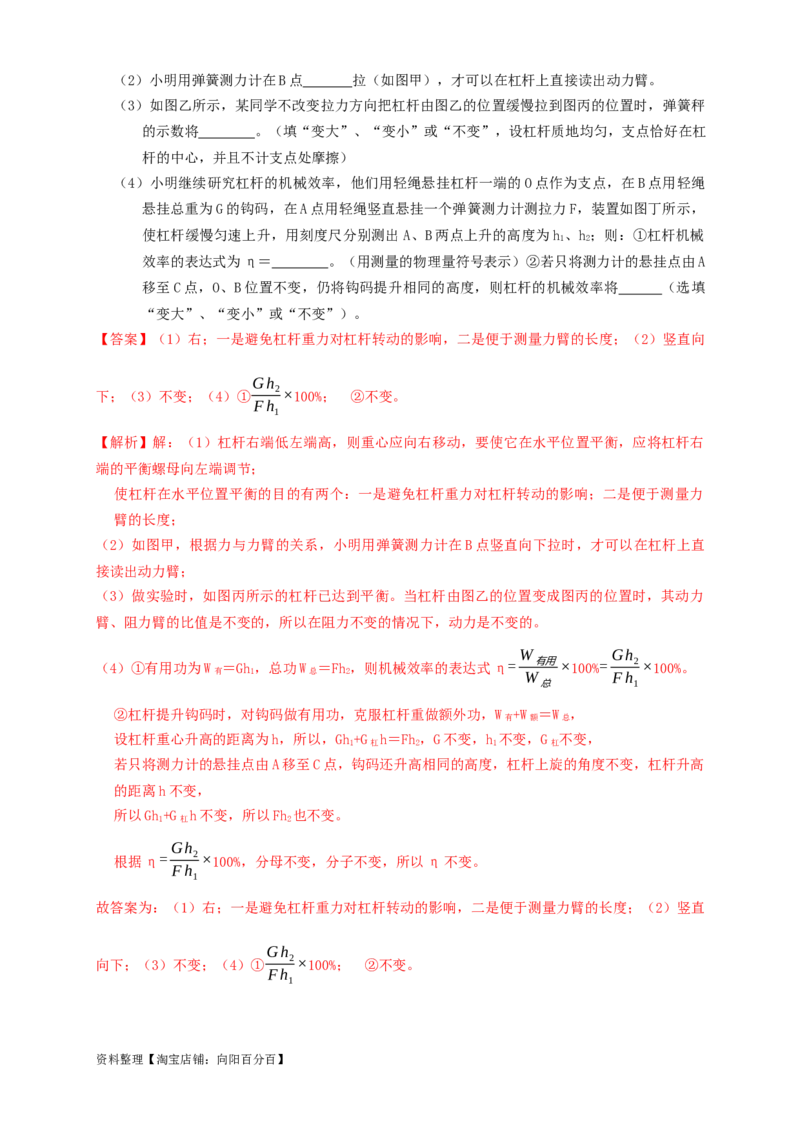
11.小明在探究“杠杆平衡条件”的实验中:
(1)小明发现杠杆左端低右端高,要使它在水平位置平衡,应将杠杆右端的平衡螺母向 调节。
小明调节杠杆在水平位置平衡的主要目的是 。
资料整理【淘宝店铺:向阳百分百】(2)小明用弹簧测力计在B点 拉(如图甲),才可以在杠杆上直接读出动力臂。
(3)如图乙所示,某同学不改变拉力方向把杠杆由图乙的位置缓慢拉到图丙的位置时,弹簧秤
的示数将 。(填“变大”、“变小”或“不变”,设杠杆质地均匀,支点恰好在杠
杆的中心,并且不计支点处摩擦)
(4)小明继续研究杠杆的机械效率,他们用轻绳悬挂杠杆一端的O点作为支点,在B点用轻绳
悬挂总重为G的钩码,在A点用轻绳竖直悬挂一个弹簧测力计测拉力F,装置如图丁所示,
使杠杆缓慢匀速上升,用刻度尺分别测出 A、B两点上升的高度为h 、h ;则:①杠杆机械
1 2
效率的表达式为η= 。(用测量的物理量符号表示)②若只将测力计的悬挂点由A
移至C点,O、B位置不变,仍将钩码提升相同的高度,则杠杆的机械效率将 (选填
“变大”、“变小”或“不变”)。
【答案】(1)右;一是避免杠杆重力对杠杆转动的影响,二是便于测量力臂的长度;(2)竖直向
Gh
下;(3)不变;(4)①
2×100%;
②不变。
Fh
1
【解析】解:(1)杠杆右端低左端高,则重心应向右移动,要使它在水平位置平衡,应将杠杆右
端的平衡螺母向左端调节;
使杠杆在水平位置平衡的目的有两个:一是避免杠杆重力对杠杆转动的影响;二是便于测量力
臂的长度;
(2)如图甲,根据力与力臂的关系,小明用弹簧测力计在B点竖直向下拉时,才可以在杠杆上直
接读出动力臂;
(3)做实验时,如图丙所示的杠杆已达到平衡。当杠杆由图乙的位置变成图丙的位置时,其动力
臂、阻力臂的比值是不变的,所以在阻力不变的情况下,动力是不变的。
W Gh
(4)①有用功为W =Gh,总功W =Fh,则机械效率的表达式η= 有用×100%= 2×100%。
有 1 总 2 W Fh
总 1
②杠杆提升钩码时,对钩码做有用功,克服杠杆重做额外功,W +W =W ,
有 额 总
设杠杆重心升高的距离为h,所以,Gh+G h=Fh,G不变,h 不变,G 不变,
1 杠 2 1 杠
若只将测力计的悬挂点由A移至C点,钩码还升高相同的高度,杠杆上旋的角度不变,杠杆升高
的距离h不变,
所以Gh+G h不变,所以Fh 也不变。
1 杠 2
Gh
根据η= 2×100%,分母不变,分子不变,所以η不变。
Fh
1
故答案为:(1)右;一是避免杠杆重力对杠杆转动的影响,二是便于测量力臂的长度;(2)竖直
Gh
向下;(3)不变;(4)①
2×100%;
②不变。
Fh
1
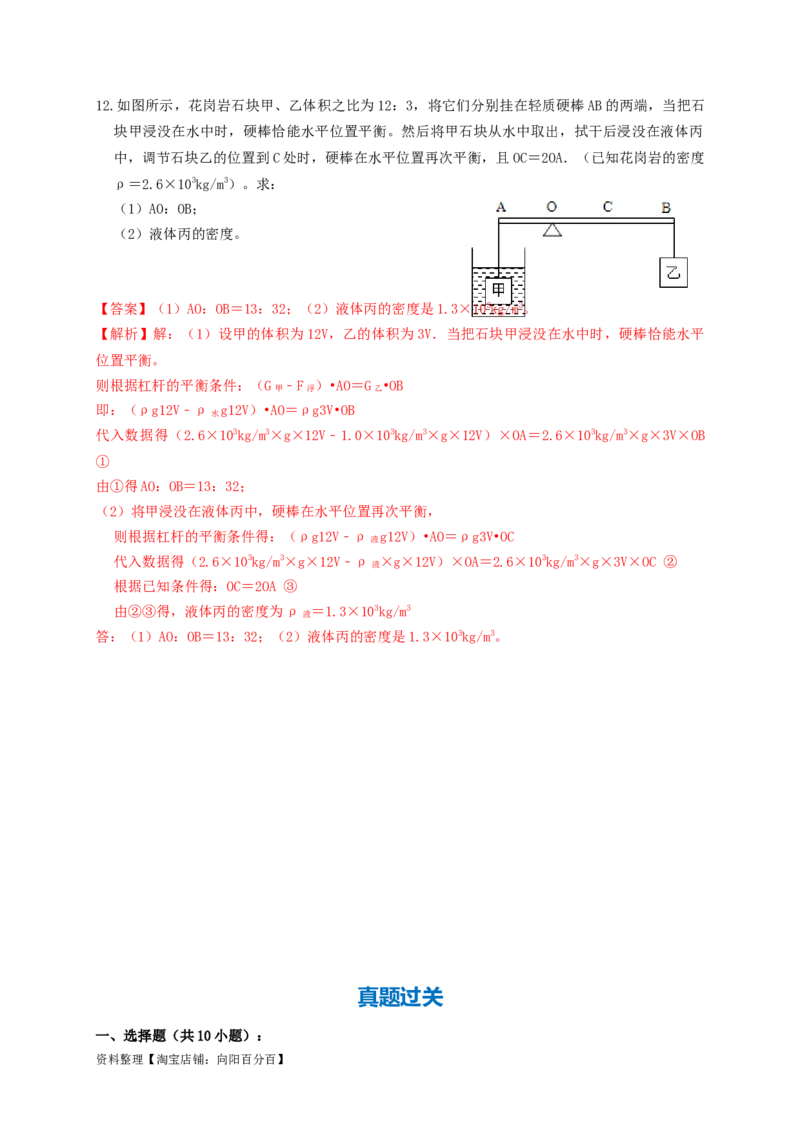
资料整理【淘宝店铺:向阳百分百】12.如图所示,花岗岩石块甲、乙体积之比为12:3,将它们分别挂在轻质硬棒AB的两端,当把石
块甲浸没在水中时,硬棒恰能水平位置平衡。然后将甲石块从水中取出,拭干后浸没在液体丙
中,调节石块乙的位置到C处时,硬棒在水平位置再次平衡,且OC=2OA.(已知花岗岩的密度
ρ=2.6×103kg/m3)。求:
(1)AO:OB;
(2)液体丙的密度。
【答案】(1)AO:OB=13:32;(2)液体丙的密度是1.3×103kg/m3。
【解析】解:(1)设甲的体积为12V,乙的体积为3V.当把石块甲浸没在水中时,硬棒恰能水平
位置平衡。
则根据杠杆的平衡条件:(G ﹣F )•AO=G •OB
甲 浮 乙
即:(ρg12V﹣ρ g12V)•AO=ρg3V•OB
水
代入数据得(2.6×103kg/m3×g×12V﹣1.0×103kg/m3×g×12V)×OA=2.6×103kg/m3×g×3V×OB
①
由①得AO:OB=13:32;
(2)将甲浸没在液体丙中,硬棒在水平位置再次平衡,
则根据杠杆的平衡条件得:(ρg12V﹣ρ g12V)•AO=ρg3V•OC
液
代入数据得(2.6×103kg/m3×g×12V﹣ρ ×g×12V)×OA=2.6×103kg/m3×g×3V×OC ②
液
根据已知条件得:OC=2OA ③
由②③得,液体丙的密度为ρ =1.3×103kg/m3
液
答:(1)AO:OB=13:32;(2)液体丙的密度是1.3×103kg/m3。
真题过关
一、选择题(共10小题):
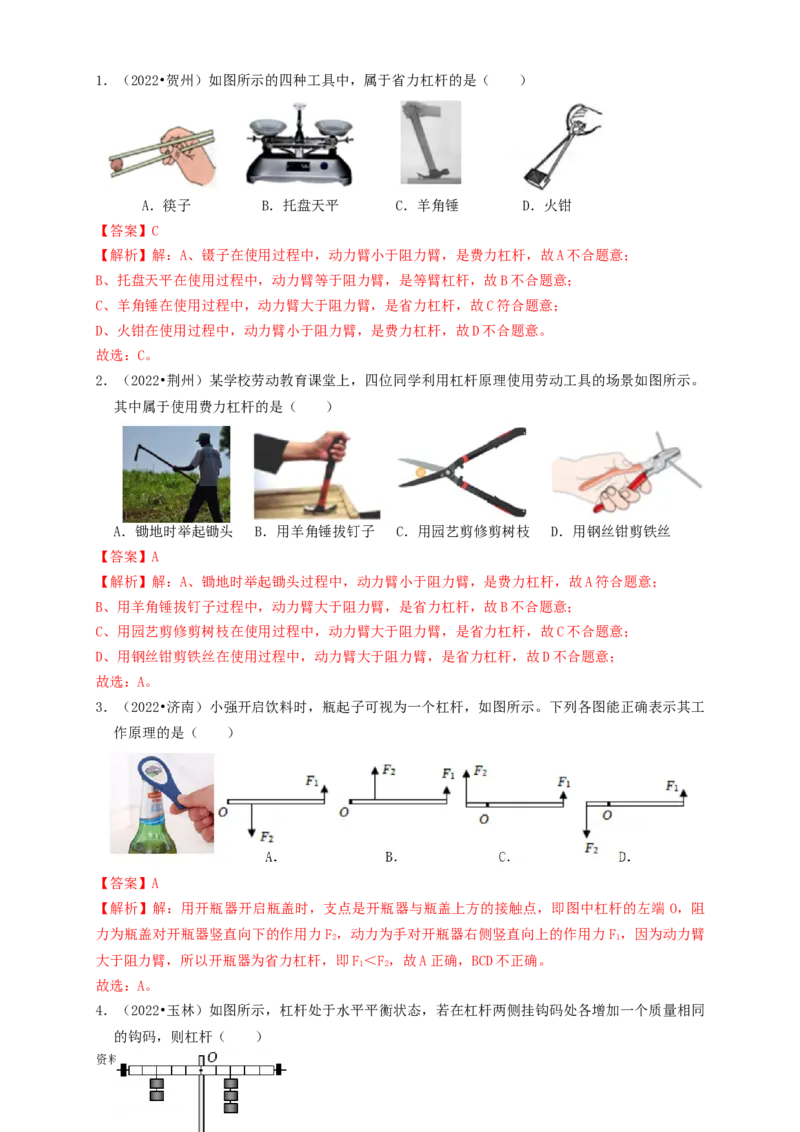
资料整理【淘宝店铺:向阳百分百】1.(2022•贺州)如图所示的四种工具中,属于省力杠杆的是( )
A.筷子 B.托盘天平 C.羊角锤 D.火钳
【答案】C
【解析】解:A、镊子在使用过程中,动力臂小于阻力臂,是费力杠杆,故A不合题意;
B、托盘天平在使用过程中,动力臂等于阻力臂,是等臂杠杆,故B不合题意;
C、羊角锤在使用过程中,动力臂大于阻力臂,是省力杠杆,故C符合题意;
D、火钳在使用过程中,动力臂小于阻力臂,是费力杠杆,故D不合题意。
故选:C。
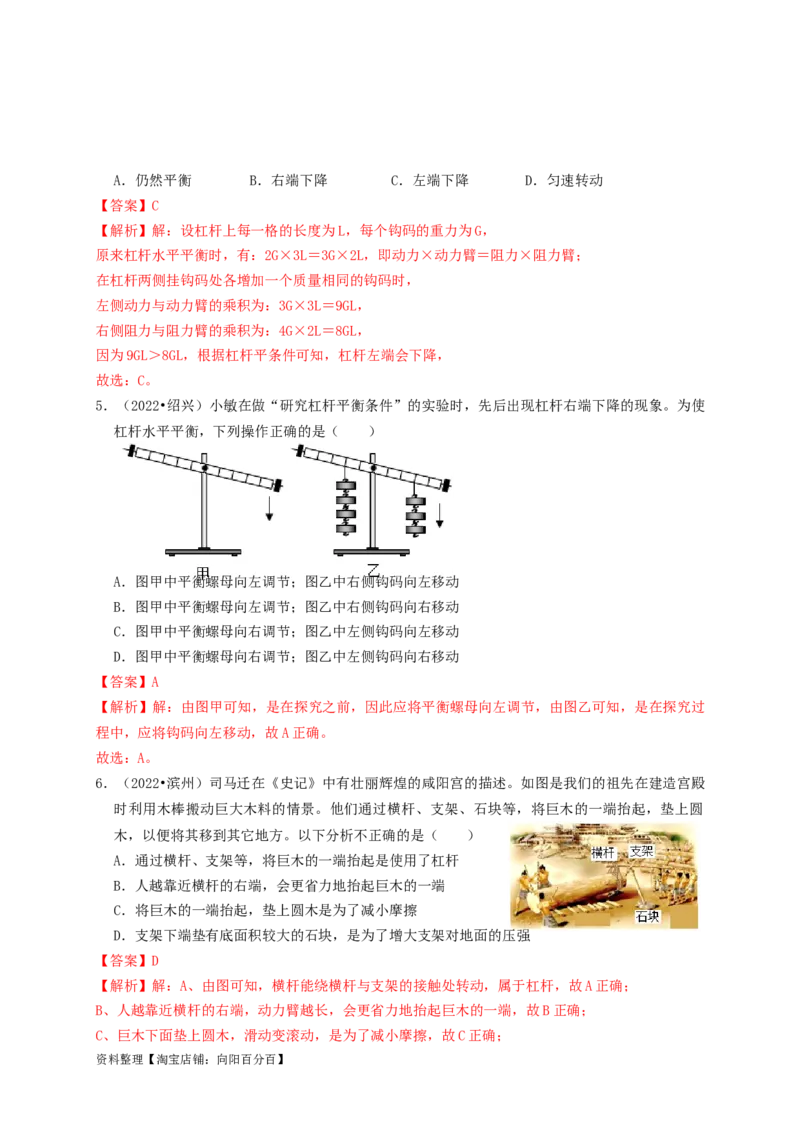
2.(2022•荆州)某学校劳动教育课堂上,四位同学利用杠杆原理使用劳动工具的场景如图所示。
其中属于使用费力杠杆的是( )
A.锄地时举起锄头 B.用羊角锤拔钉子 C.用园艺剪修剪树枝 D.用钢丝钳剪铁丝
【答案】A
【解析】解:A、锄地时举起锄头过程中,动力臂小于阻力臂,是费力杠杆,故A符合题意;
B、用羊角锤拔钉子过程中,动力臂大于阻力臂,是省力杠杆,故B不合题意;
C、用园艺剪修剪树枝在使用过程中,动力臂大于阻力臂,是省力杠杆,故C不合题意;
D、用钢丝钳剪铁丝在使用过程中,动力臂大于阻力臂,是省力杠杆,故D不合题意;
故选:A。
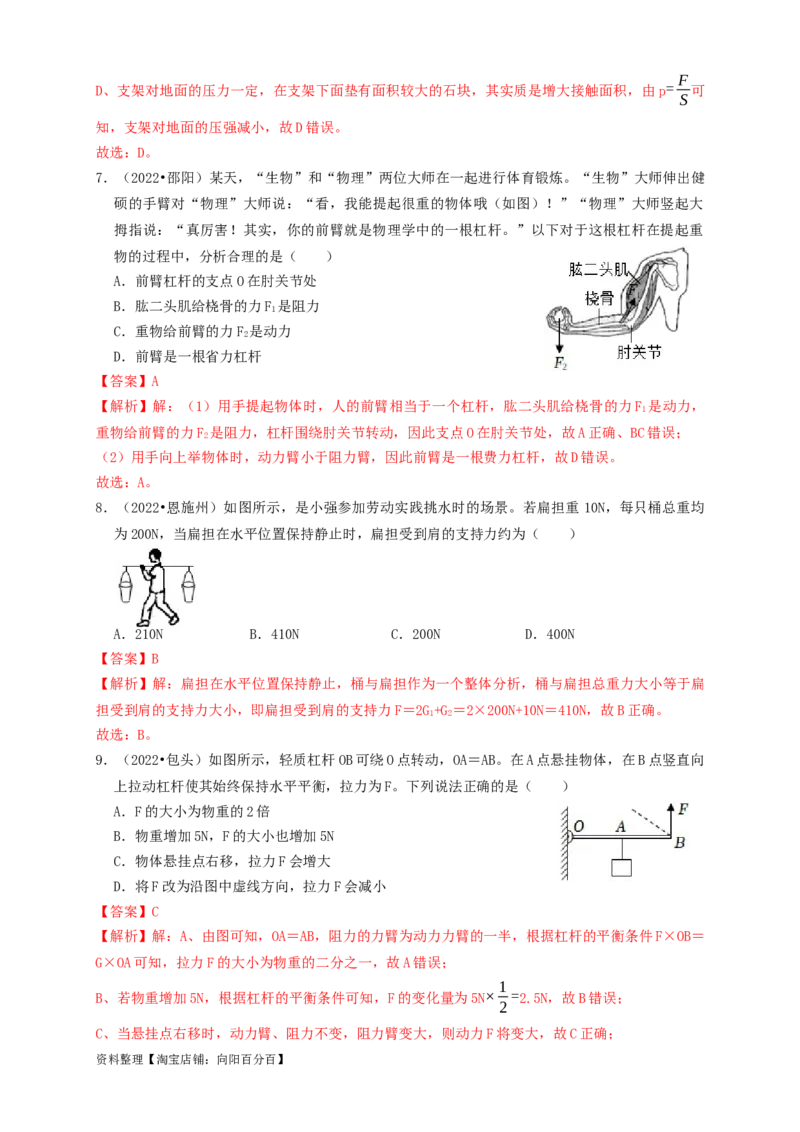
3.(2022•济南)小强开启饮料时,瓶起子可视为一个杠杆,如图所示。下列各图能正确表示其工
作原理的是( )
【答案】A
【解析】解:用开瓶器开启瓶盖时,支点是开瓶器与瓶盖上方的接触点,即图中杠杆的左端 O,阻
力为瓶盖对开瓶器竖直向下的作用力F ,动力为手对开瓶器右侧竖直向上的作用力F ,因为动力臂
2 1
大于阻力臂,所以开瓶器为省力杠杆,即F<F,故A正确,BCD不正确。
1 2
故选:A。
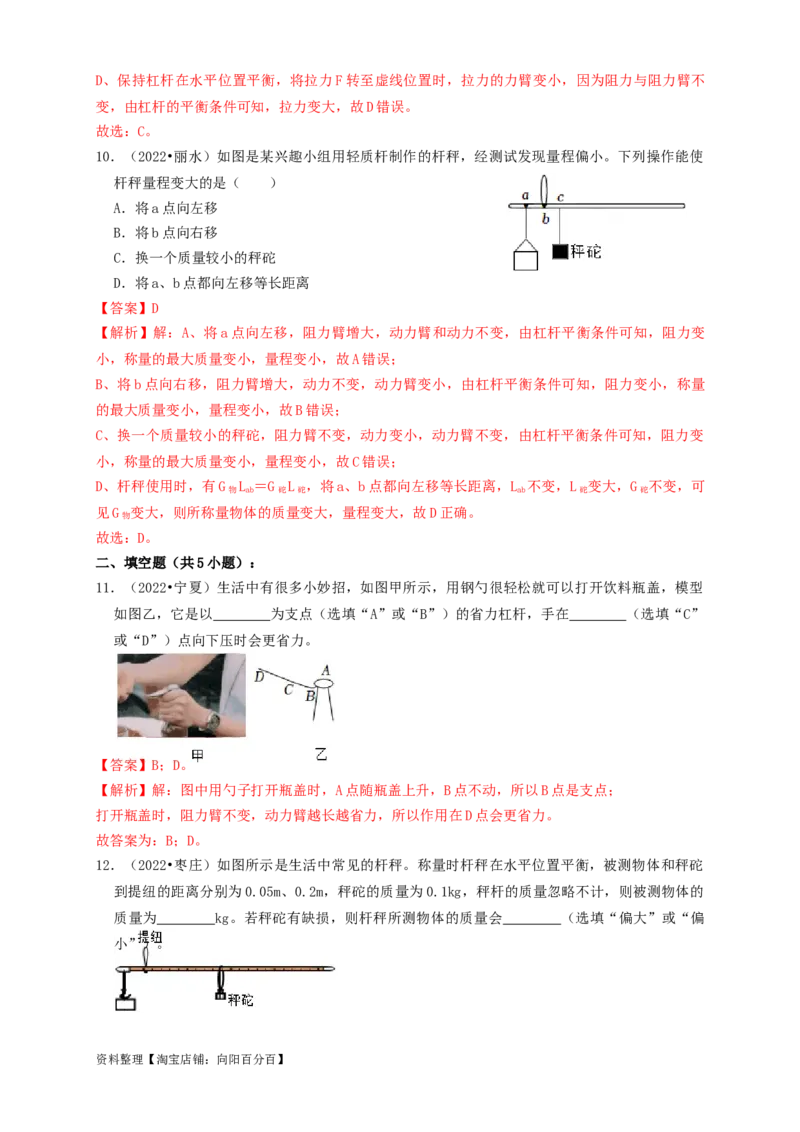
4.(2022•玉林)如图所示,杠杆处于水平平衡状态,若在杠杆两侧挂钩码处各增加一个质量相同
的钩码,则杠杆( )
资料整理【淘宝店铺:向阳百分百】A.仍然平衡 B.右端下降 C.左端下降 D.匀速转动
【答案】C
【解析】解:设杠杆上每一格的长度为L,每个钩码的重力为G,
原来杠杆水平平衡时,有:2G×3L=3G×2L,即动力×动力臂=阻力×阻力臂;
在杠杆两侧挂钩码处各增加一个质量相同的钩码时,
左侧动力与动力臂的乘积为:3G×3L=9GL,
右侧阻力与阻力臂的乘积为:4G×2L=8GL,
因为9GL>8GL,根据杠杆平条件可知,杠杆左端会下降,
故选:C。
5.(2022•绍兴)小敏在做“研究杠杆平衡条件”的实验时,先后出现杠杆右端下降的现象。为使
杠杆水平平衡,下列操作正确的是( )
A.图甲中平衡螺母向左调节;图乙中右侧钩码向左移动
B.图甲中平衡螺母向左调节;图乙中右侧钩码向右移动
C.图甲中平衡螺母向右调节;图乙中左侧钩码向左移动
D.图甲中平衡螺母向右调节;图乙中左侧钩码向右移动
【答案】A
【解析】解:由图甲可知,是在探究之前,因此应将平衡螺母向左调节,由图乙可知,是在探究过
程中,应将钩码向左移动,故A正确。
故选:A。
6.(2022•滨州)司马迁在《史记》中有壮丽辉煌的咸阳宫的描述。如图是我们的祖先在建造宫殿
时利用木棒搬动巨大木料的情景。他们通过横杆、支架、石块等,将巨木的一端抬起,垫上圆
木,以便将其移到其它地方。以下分析不正确的是( )
A.通过横杆、支架等,将巨木的一端抬起是使用了杠杆
B.人越靠近横杆的右端,会更省力地抬起巨木的一端
C.将巨木的一端抬起,垫上圆木是为了减小摩擦
D.支架下端垫有底面积较大的石块,是为了增大支架对地面的压强
【答案】D
【解析】解:A、由图可知,横杆能绕横杆与支架的接触处转动,属于杠杆,故A正确;
B、人越靠近横杆的右端,动力臂越长,会更省力地抬起巨木的一端,故B正确;
C、巨木下面垫上圆木,滑动变滚动,是为了减小摩擦,故C正确;
资料整理【淘宝店铺:向阳百分百】F
D、支架对地面的压力一定,在支架下面垫有面积较大的石块,其实质是增大接触面积,由p= 可
S
知,支架对地面的压强减小,故D错误。
故选:D。
7.(2022•邵阳)某天,“生物”和“物理”两位大师在一起进行体育锻炼。“生物”大师伸出健
硕的手臂对“物理”大师说:“看,我能提起很重的物体哦(如图)!”“物理”大师竖起大
拇指说:“真厉害!其实,你的前臂就是物理学中的一根杠杆。”以下对于这根杠杆在提起重
物的过程中,分析合理的是( )
A.前臂杠杆的支点O在肘关节处
B.肱二头肌给桡骨的力F 是阻力
1
C.重物给前臂的力F 是动力
2
D.前臂是一根省力杠杆
【答案】A
【解析】解:(1)用手提起物体时,人的前臂相当于一个杠杆,肱二头肌给桡骨的力F 是动力,
1
重物给前臂的力F 是阻力,杠杆围绕肘关节转动,因此支点O在肘关节处,故A正确、BC错误;
2
(2)用手向上举物体时,动力臂小于阻力臂,因此前臂是一根费力杠杆,故D错误。
故选:A。
8.(2022•恩施州)如图所示,是小强参加劳动实践挑水时的场景。若扁担重 10N,每只桶总重均
为200N,当扁担在水平位置保持静止时,扁担受到肩的支持力约为( )
A.210N B.410N C.200N D.400N
【答案】B
【解析】解:扁担在水平位置保持静止,桶与扁担作为一个整体分析,桶与扁担总重力大小等于扁
担受到肩的支持力大小,即扁担受到肩的支持力F=2G+G=2×200N+10N=410N,故B正确。
1 2
故选:B。
9.(2022•包头)如图所示,轻质杠杆OB可绕O点转动,OA=AB。在A点悬挂物体,在B点竖直向
上拉动杠杆使其始终保持水平平衡,拉力为F。下列说法正确的是( )
A.F的大小为物重的2倍
B.物重增加5N,F的大小也增加5N
C.物体悬挂点右移,拉力F会增大
D.将F改为沿图中虚线方向,拉力F会减小
【答案】C
【解析】解:A、由图可知,OA=AB,阻力的力臂为动力力臂的一半,根据杠杆的平衡条件F×OB=
G×OA可知,拉力F的大小为物重的二分之一,故A错误;
1
B、若物重增加5N,根据杠杆的平衡条件可知,F的变化量为5N× =2.5N,故B错误;
2
C、当悬挂点右移时,动力臂、阻力不变,阻力臂变大,则动力F将变大,故C正确;
资料整理【淘宝店铺:向阳百分百】D、保持杠杆在水平位置平衡,将拉力F转至虚线位置时,拉力的力臂变小,因为阻力与阻力臂不
变,由杠杆的平衡条件可知,拉力变大,故D错误。
故选:C。
10.(2022•丽水)如图是某兴趣小组用轻质杆制作的杆秤,经测试发现量程偏小。下列操作能使
杆秤量程变大的是( )
A.将a点向左移
B.将b点向右移
C.换一个质量较小的秤砣
D.将a、b点都向左移等长距离
【答案】D
【解析】解:A、将a点向左移,阻力臂增大,动力臂和动力不变,由杠杆平衡条件可知,阻力变
小,称量的最大质量变小,量程变小,故A错误;
B、将b点向右移,阻力臂增大,动力不变,动力臂变小,由杠杆平衡条件可知,阻力变小,称量
的最大质量变小,量程变小,故B错误;
C、换一个质量较小的秤砣,阻力臂不变,动力变小,动力臂不变,由杠杆平衡条件可知,阻力变
小,称量的最大质量变小,量程变小,故C错误;
D、杆秤使用时,有G L =G L ,将a、b点都向左移等长距离,L 不变,L 变大,G 不变,可
物 ab 砣 砣 ab 砣 砣
见G 变大,则所称量物体的质量变大,量程变大,故D正确。
物
故选:D。
二、填空题(共5小题):
11.(2022•宁夏)生活中有很多小妙招,如图甲所示,用钢勺很轻松就可以打开饮料瓶盖,模型
如图乙,它是以 为支点(选填“A”或“B”)的省力杠杆,手在 (选填“C”
或“D”)点向下压时会更省力。
【答案】B;D。
【解析】解:图中用勺子打开瓶盖时,A点随瓶盖上升,B点不动,所以B点是支点;
打开瓶盖时,阻力臂不变,动力臂越长越省力,所以作用在D点会更省力。
故答案为:B;D。
12.(2022•枣庄)如图所示是生活中常见的杆秤。称量时杆秤在水平位置平衡,被测物体和秤砣
到提纽的距离分别为0.05m、0.2m,秤砣的质量为0.1kg,秤杆的质量忽略不计,则被测物体的
质量为 kg。若秤砣有缺损,则杆秤所测物体的质量会 (选填“偏大”或“偏
小”)。
资料整理【淘宝店铺:向阳百分百】【答案】0.4;偏大。
【解析】解:如图,由杠杆平衡可知G•OA=G•OB,即:mg•OA=mg•OB,
1 2 1 2
m ×OB 0.1kg×0.2m
∴m = 2 = =0.4kg。
1
OA 0.05m
若秤砣有缺损,m 减小,而G•OA不变,所以OB要变大,
2 1
杆秤所示的质量值要偏大。
故答案为:0.4;偏大。
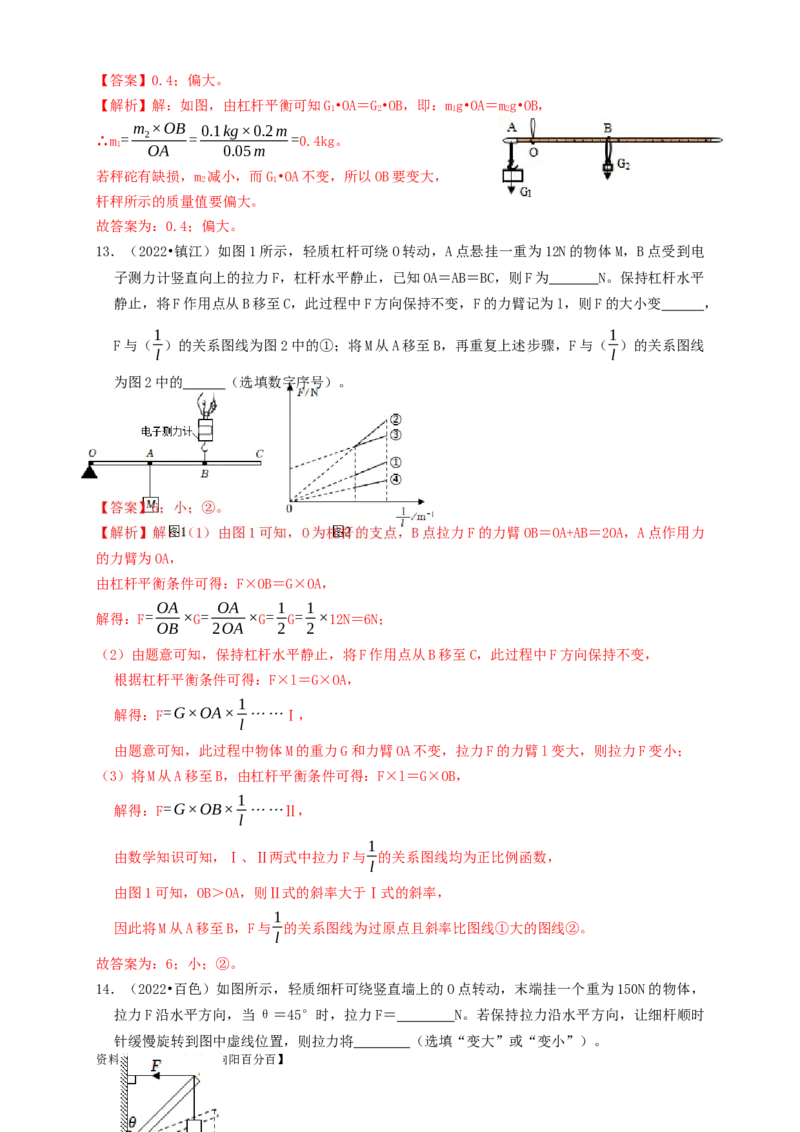
13.(2022•镇江)如图1所示,轻质杠杆可绕O转动,A点悬挂一重为12N的物体M,B点受到电
子测力计竖直向上的拉力F,杠杆水平静止,已知OA=AB=BC,则F为 N。保持杠杆水平
静止,将F作用点从B移至C,此过程中F方向保持不变,F的力臂记为l,则F的大小变 ,
1 1
F与( )的关系图线为图2中的①;将M从A移至B,再重复上述步骤,F与( )的关系图线
l l
为图2中的 (选填数字序号)。
【答案】6;小;②。
【解析】解:(1)由图1可知,O为杠杆的支点,B点拉力F的力臂OB=OA+AB=2OA,A点作用力
的力臂为OA,
由杠杆平衡条件可得:F×OB=G×OA,
OA OA 1 1
解得:F= ×G= ×G= G= ×12N=6N;
OB 2OA 2 2
(2)由题意可知,保持杠杆水平静止,将F作用点从B移至C,此过程中F方向保持不变,
根据杠杆平衡条件可得:F×l=G×OA,
1
解得:F=G×OA× ⋯⋯Ⅰ,
l
由题意可知,此过程中物体M的重力G和力臂OA不变,拉力F的力臂l变大,则拉力F变小;
(3)将M从A移至B,由杠杆平衡条件可得:F×l=G×OB,
1
解得:F=G×OB× ⋯⋯Ⅱ,
l
1
由数学知识可知,Ⅰ、Ⅱ两式中拉力F与 的关系图线均为正比例函数,
l
由图1可知,OB>OA,则Ⅱ式的斜率大于Ⅰ式的斜率,
1
因此将M从A移至B,F与 的关系图线为过原点且斜率比图线①大的图线②。
l
故答案为:6;小;②。
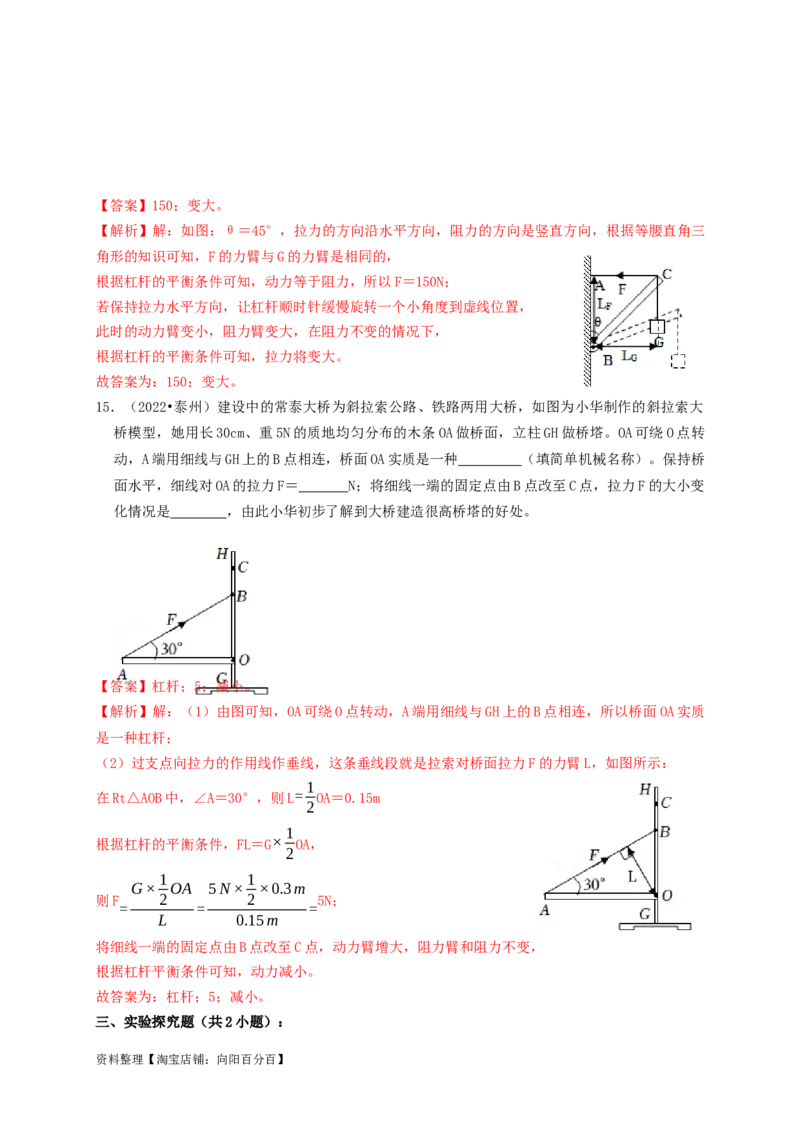
14.(2022•百色)如图所示,轻质细杆可绕竖直墙上的O点转动,末端挂一个重为150N的物体,
拉力F沿水平方向,当θ=45°时,拉力F= N。若保持拉力沿水平方向,让细杆顺时
针缓慢旋转到图中虚线位置,则拉力将 (选填“变大”或“变小”)。
资料整理【淘宝店铺:向阳百分百】【答案】150;变大。
【解析】解:如图:θ=45°,拉力的方向沿水平方向,阻力的方向是竖直方向,根据等腰直角三
角形的知识可知,F的力臂与G的力臂是相同的,
根据杠杆的平衡条件可知,动力等于阻力,所以F=150N;
若保持拉力水平方向,让杠杆顺时针缓慢旋转一个小角度到虚线位置,
此时的动力臂变小,阻力臂变大,在阻力不变的情况下,
根据杠杆的平衡条件可知,拉力将变大。
故答案为:150;变大。
15.(2022•泰州)建设中的常泰大桥为斜拉索公路、铁路两用大桥,如图为小华制作的斜拉索大
桥模型,她用长30cm、重5N的质地均匀分布的木条OA做桥面,立柱GH做桥塔。OA可绕O点转
动,A端用细线与GH上的B点相连,桥面OA实质是一种 (填简单机械名称)。保持桥
面水平,细线对OA的拉力F= N;将细线一端的固定点由B点改至C点,拉力F的大小变
化情况是 ,由此小华初步了解到大桥建造很高桥塔的好处。
【答案】杠杆;5;减小。
【解析】解:(1)由图可知,OA可绕O点转动,A端用细线与GH上的B点相连,所以桥面OA实质
是一种杠杆;
(2)过支点向拉力的作用线作垂线,这条垂线段就是拉索对桥面拉力F的力臂L,如图所示:
1
在Rt△AOB中,∠A=30°,则L= OA=0.15m
2
1
根据杠杆的平衡条件,FL=G× OA,
2
1 1
G× OA 5N× ×0.3m
则F 2 2 5N;
= = =
L 0.15m
将细线一端的固定点由B点改至C点,动力臂增大,阻力臂和阻力不变,
根据杠杆平衡条件可知,动力减小。
故答案为:杠杆;5;减小。
三、实验探究题(共2小题):
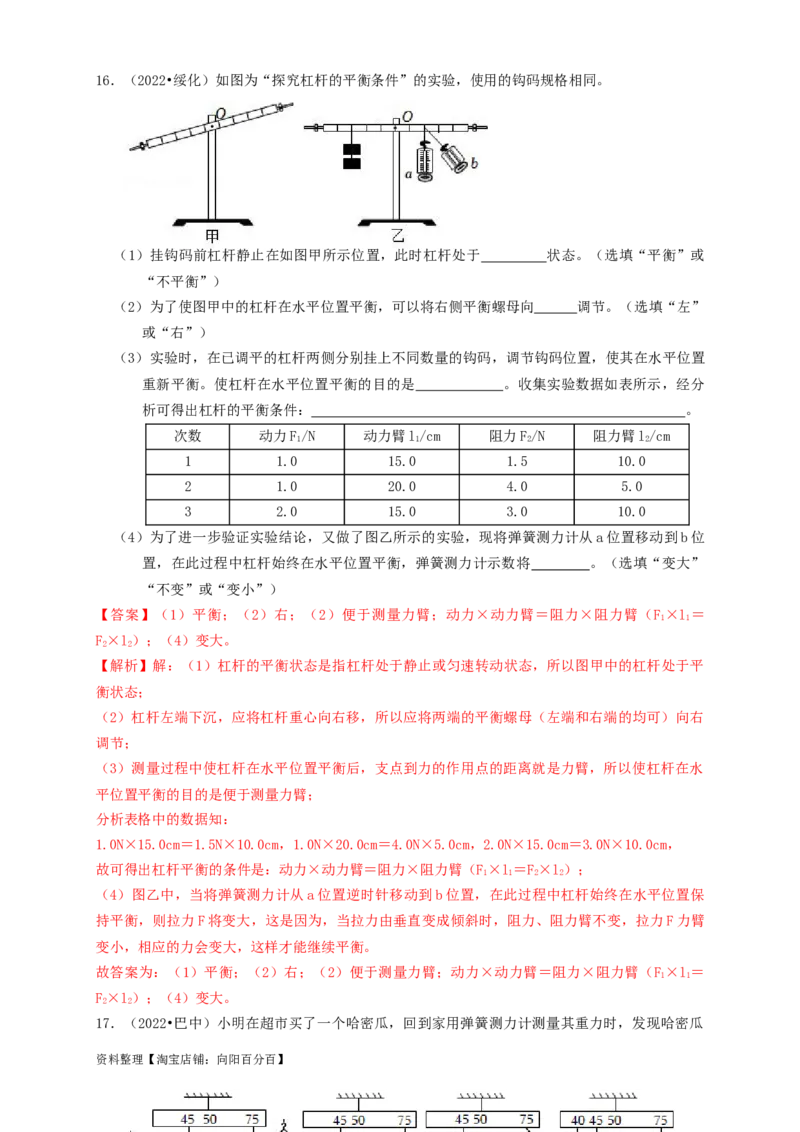
资料整理【淘宝店铺:向阳百分百】16.(2022•绥化)如图为“探究杠杆的平衡条件”的实验,使用的钩码规格相同。
(1)挂钩码前杠杆静止在如图甲所示位置,此时杠杆处于 状态。(选填“平衡”或
“不平衡”)
(2)为了使图甲中的杠杆在水平位置平衡,可以将右侧平衡螺母向 调节。(选填“左”
或“右”)
(3)实验时,在已调平的杠杆两侧分别挂上不同数量的钩码,调节钩码位置,使其在水平位置
重新平衡。使杠杆在水平位置平衡的目的是 。收集实验数据如表所示,经分
析可得出杠杆的平衡条件: 。
次数 动力F/N 动力臂l/cm 阻力F/N 阻力臂l/cm
1 1 2 2
1 1.0 15.0 1.5 10.0
2 1.0 20.0 4.0 5.0
3 2.0 15.0 3.0 10.0
(4)为了进一步验证实验结论,又做了图乙所示的实验,现将弹簧测力计从a位置移动到b位
置,在此过程中杠杆始终在水平位置平衡,弹簧测力计示数将 。(选填“变大”
“不变”或“变小”)
【答案】(1)平衡;(2)右;(2)便于测量力臂;动力×动力臂=阻力×阻力臂(F×l =
1 1
F×l);(4)变大。
2 2
【解析】解:(1)杠杆的平衡状态是指杠杆处于静止或匀速转动状态,所以图甲中的杠杆处于平
衡状态;
(2)杠杆左端下沉,应将杠杆重心向右移,所以应将两端的平衡螺母(左端和右端的均可)向右
调节;
(3)测量过程中使杠杆在水平位置平衡后,支点到力的作用点的距离就是力臂,所以使杠杆在水
平位置平衡的目的是便于测量力臂;
分析表格中的数据知:
1.0N×15.0cm=1.5N×10.0cm,1.0N×20.0cm=4.0N×5.0cm,2.0N×15.0cm=3.0N×10.0cm,
故可得出杠杆平衡的条件是:动力×动力臂=阻力×阻力臂(F×l=F×l);
1 1 2 2
(4)图乙中,当将弹簧测力计从a位置逆时针移动到b位置,在此过程中杠杆始终在水平位置保
持平衡,则拉力F将变大,这是因为,当拉力由垂直变成倾斜时,阻力、阻力臂不变,拉力F力臂
变小,相应的力会变大,这样才能继续平衡。
故答案为:(1)平衡;(2)右;(2)便于测量力臂;动力×动力臂=阻力×阻力臂(F×l =
1 1
F×l);(4)变大。
2 2
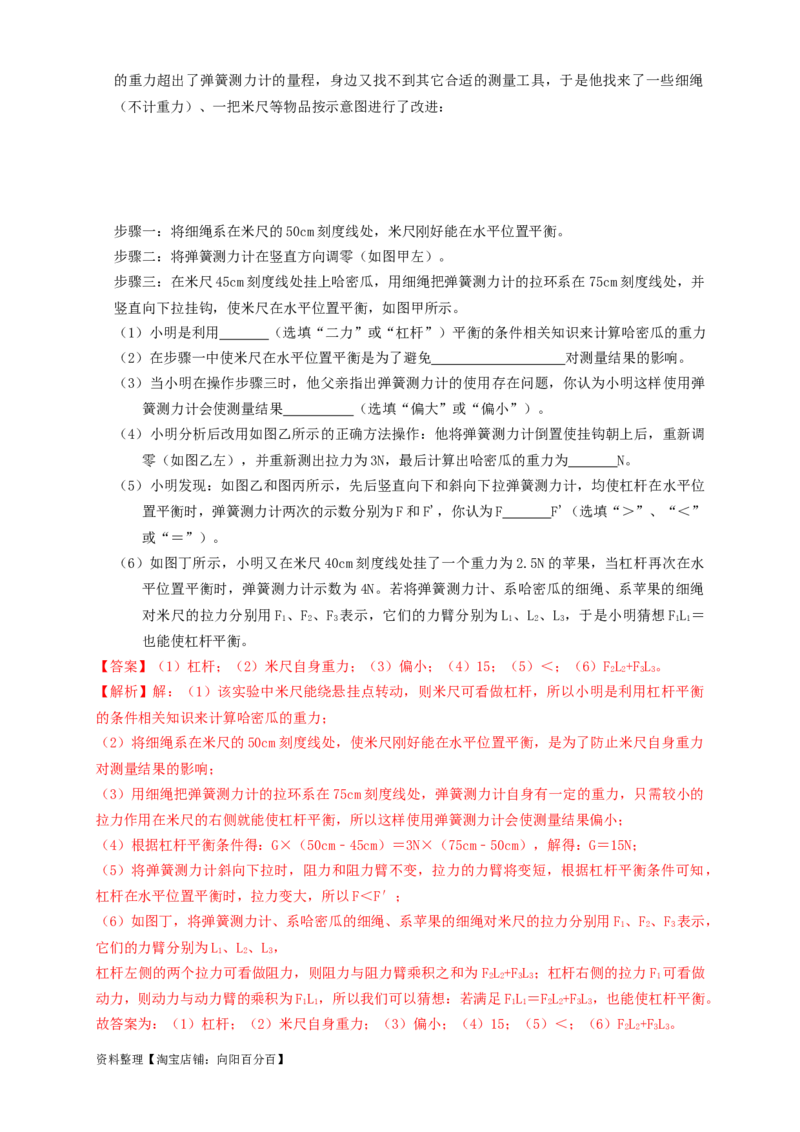
17.(2022•巴中)小明在超市买了一个哈密瓜,回到家用弹簧测力计测量其重力时,发现哈密瓜
资料整理【淘宝店铺:向阳百分百】的重力超出了弹簧测力计的量程,身边又找不到其它合适的测量工具,于是他找来了一些细绳
(不计重力)、一把米尺等物品按示意图进行了改进:
步骤一:将细绳系在米尺的50cm刻度线处,米尺刚好能在水平位置平衡。
步骤二:将弹簧测力计在竖直方向调零(如图甲左)。
步骤三:在米尺45cm刻度线处挂上哈密瓜,用细绳把弹簧测力计的拉环系在75cm刻度线处,并
竖直向下拉挂钩,使米尺在水平位置平衡,如图甲所示。
(1)小明是利用 (选填“二力”或“杠杆”)平衡的条件相关知识来计算哈密瓜的重力
(2)在步骤一中使米尺在水平位置平衡是为了避免 对测量结果的影响。
(3)当小明在操作步骤三时,他父亲指出弹簧测力计的使用存在问题,你认为小明这样使用弹
簧测力计会使测量结果 (选填“偏大”或“偏小”)。
(4)小明分析后改用如图乙所示的正确方法操作:他将弹簧测力计倒置使挂钩朝上后,重新调
零(如图乙左),并重新测出拉力为3N,最后计算出哈密瓜的重力为 N。
(5)小明发现:如图乙和图丙所示,先后竖直向下和斜向下拉弹簧测力计,均使杠杆在水平位
置平衡时,弹簧测力计两次的示数分别为F和F',你认为F F'(选填“>”、“<”
或“=”)。
(6)如图丁所示,小明又在米尺40cm刻度线处挂了一个重力为2.5N的苹果,当杠杆再次在水
平位置平衡时,弹簧测力计示数为4N。若将弹簧测力计、系哈密瓜的细绳、系苹果的细绳
对米尺的拉力分别用F 、F 、F 表示,它们的力臂分别为L 、L 、L ,于是小明猜想FL =
1 2 3 1 2 3 1 1
也能使杠杆平衡。
【答案】(1)杠杆;(2)米尺自身重力;(3)偏小;(4)15;(5)<;(6)FL+FL。
2 2 3 3
【解析】解:(1)该实验中米尺能绕悬挂点转动,则米尺可看做杠杆,所以小明是利用杠杆平衡
的条件相关知识来计算哈密瓜的重力;
(2)将细绳系在米尺的50cm刻度线处,使米尺刚好能在水平位置平衡,是为了防止米尺自身重力
对测量结果的影响;
(3)用细绳把弹簧测力计的拉环系在75cm刻度线处,弹簧测力计自身有一定的重力,只需较小的
拉力作用在米尺的右侧就能使杠杆平衡,所以这样使用弹簧测力计会使测量结果偏小;
(4)根据杠杆平衡条件得:G×(50cm﹣45cm)=3N×(75cm﹣50cm),解得:G=15N;
(5)将弹簧测力计斜向下拉时,阻力和阻力臂不变,拉力的力臂将变短,根据杠杆平衡条件可知,
杠杆在水平位置平衡时,拉力变大,所以F<F′;
(6)如图丁,将弹簧测力计、系哈密瓜的细绳、系苹果的细绳对米尺的拉力分别用F、F、F 表示,
1 2 3
它们的力臂分别为L、L、L,
1 2 3
杠杆左侧的两个拉力可看做阻力,则阻力与阻力臂乘积之和为FL+FL ;杠杆右侧的拉力F 可看做
2 2 3 3 1
动力,则动力与动力臂的乘积为FL,所以我们可以猜想:若满足FL=FL+FL,也能使杠杆平衡。
1 1 1 1 2 2 3 3
故答案为:(1)杠杆;(2)米尺自身重力;(3)偏小;(4)15;(5)<;(6)FL+FL。
2 2 3 3
资料整理【淘宝店铺:向阳百分百】四、计算题(共3小题):
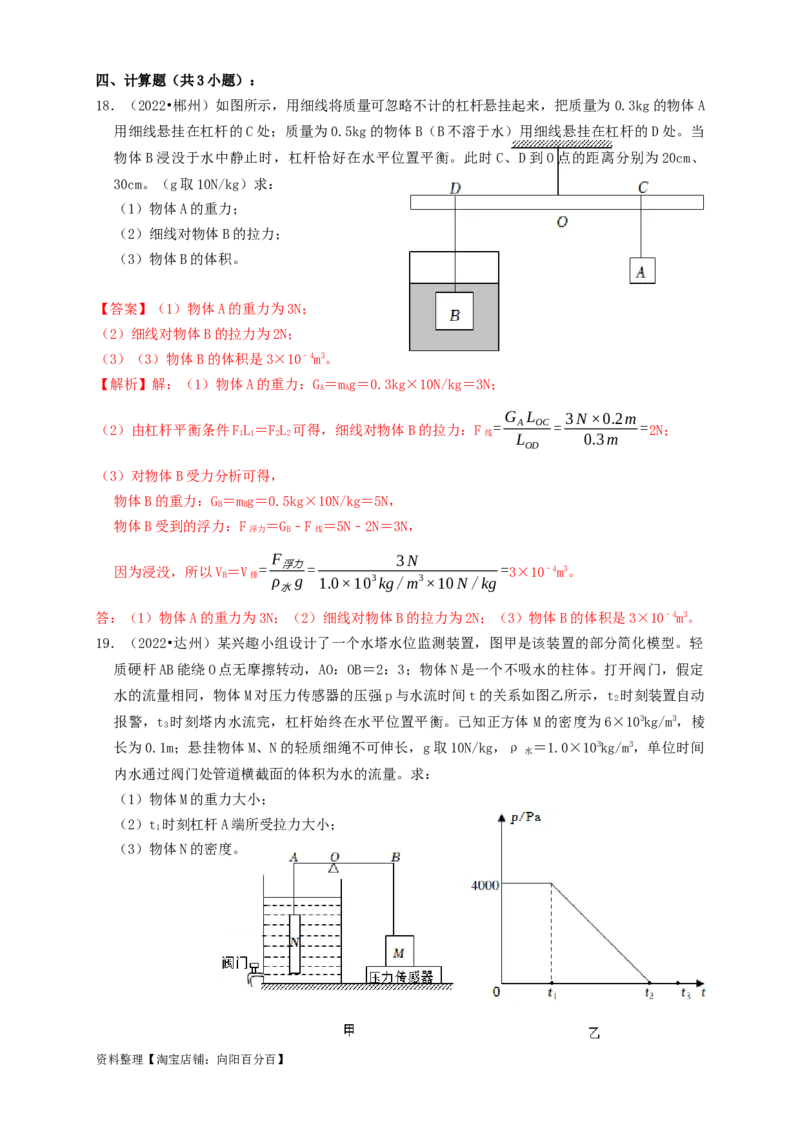
18.(2022•郴州)如图所示,用细线将质量可忽略不计的杠杆悬挂起来,把质量为0.3kg的物体A
用细线悬挂在杠杆的C处;质量为0.5kg的物体B(B不溶于水)用细线悬挂在杠杆的D处。当
物体B浸没于水中静止时,杠杆恰好在水平位置平衡。此时C、D到O点的距离分别为20cm、
30cm。(g取10N/kg)求:
(1)物体A的重力;
(2)细线对物体B的拉力;
(3)物体B的体积。
【答案】(1)物体A的重力为3N;
(2)细线对物体B的拉力为2N;
(3)(3)物体B的体积是3×10﹣4m3。
【解析】解:(1)物体A的重力:G=mg=0.3kg×10N/kg=3N;
A A
G L 3N×0.2m
(2)由杠杆平衡条件FL=FL 可得,细线对物体B的拉力:F = A OC = =2N;
1 1 2 2 线 L 0.3m
OD
(3)对物体B受力分析可得,
物体B的重力:G=mg=0.5kg×10N/kg=5N,
B B
物体B受到的浮力:F =G﹣F =5N﹣2N=3N,
浮力 B 线
F 3N
因为浸没,所以V=V = 浮力= =3×10﹣4m3。
B 排 ρ g 1.0×103kg/m3×10N/kg
水
答:(1)物体A的重力为3N;(2)细线对物体B的拉力为2N;(3)物体B的体积是3×10﹣4m3。
19.(2022•达州)某兴趣小组设计了一个水塔水位监测装置,图甲是该装置的部分简化模型。轻
质硬杆AB能绕O点无摩擦转动,AO:OB=2:3;物体N是一个不吸水的柱体。打开阀门,假定
水的流量相同,物体M对压力传感器的压强p与水流时间t的关系如图乙所示,t 时刻装置自动
2
报警,t 时刻塔内水流完,杠杆始终在水平位置平衡。已知正方体 M的密度为6×103kg/m3,棱
3
长为0.1m;悬挂物体M、N的轻质细绳不可伸长,g取10N/kg,ρ =1.0×103kg/m3,单位时间
水
内水通过阀门处管道横截面的体积为水的流量。求:
(1)物体M的重力大小;
(2)t 时刻杠杆A端所受拉力大小;
1
(3)物体N的密度。
资料整理【淘宝店铺:向阳百分百】【答案】(1)物体M的重力大小是60N;(2)t 时刻杠杆A端所受拉力大小是30N;
1
(3)物体N的密度是1.5×103kg/m3。
【解析】解:(1)M的体积V=(0.1m)3=10﹣3m3;
物体M的重力G=mg=ρVg=6×103kg/m3×10﹣3m3×10N/kg=60N;
(2)由图分析可知,当在t 时,液面刚好到N的上表面。F=ps=4000Pa×(0.1m)2=40N;
1
根据力的作用是相互的,F =F=40N;
支
对于M受力分析:受到支持力,重力和B端绳子的拉力。F=G﹣F =60N﹣40N=20N;
B 支
对于杠杆平衡原理:F×OA=F×OB;F×2=20N×3,解得F=30N;
A B A A
(3)t 时压力传感器的压强为0,t 时压力传感器的压强也为0,说明在t 时,物体N已经完全露
2 3 2
出水面;
则F′=G=60N;
B
对于杠杆平衡原理:F′×OA=F′×OB;F′×2=60N×3,解得F′=90N;
A B A A
此时N受力分析:重力和A端拉力;所以G=F′=90N;
N A
t 时N受力分析:重力,A端拉力和浮力;F =G﹣F=90N﹣30N=60N;
1 浮 N A
F 60N
此时N完全浸没,N的体积V=V = 浮 = =6×10﹣3m3;
N 排 ρ g 1.0×103kg/m3×10N/kg
水
m G 90N
N的密度ρ = N = N = =1.5×103kg/m3。
N V gV 10N/kg×6×10-3m3
N N
答:(1)物体M的重力大小是60N;(2)t 时刻杠杆A端所受拉力大小是30N;
1
(3)物体N的密度是1.5×103kg/m3。
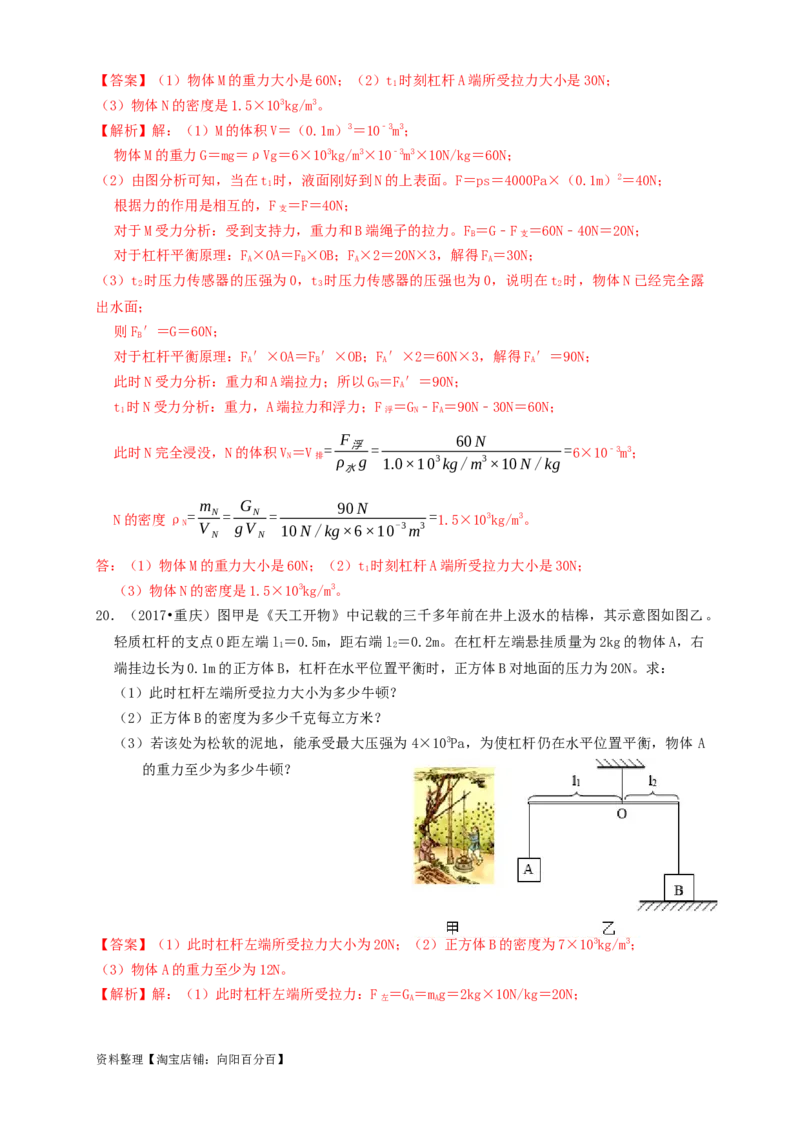
20.(2017•重庆)图甲是《天工开物》中记载的三千多年前在井上汲水的桔槔,其示意图如图乙。
轻质杠杆的支点O距左端l =0.5m,距右端l =0.2m。在杠杆左端悬挂质量为2kg的物体A,右
1 2
端挂边长为0.1m的正方体B,杠杆在水平位置平衡时,正方体B对地面的压力为20N。求:
(1)此时杠杆左端所受拉力大小为多少牛顿?
(2)正方体B的密度为多少千克每立方米?
(3)若该处为松软的泥地,能承受最大压强为 4×103Pa,为使杠杆仍在水平位置平衡,物体 A
的重力至少为多少牛顿?
【答案】(1)此时杠杆左端所受拉力大小为20N;(2)正方体B的密度为7×103kg/m3;
(3)物体A的重力至少为12N。
【解析】解:(1)此时杠杆左端所受拉力:F =G=mg=2kg×10N/kg=20N;
左 A A
资料整理【淘宝店铺:向阳百分百】l 0.5m
(2)由Fl=Fl 可得,杠杆右端的拉力即绳子对B的拉力:F=F = 1 F = ×20N=50N,
1 1 2 2 B 右 l 左 0.2m
2
因正方体B对地面的压力等于B的重力减去绳子对B的拉力,
所以,B的重力:G=F+F =50N+20N=70N,
B B 压
G 70N
由G=mg可得,B的质量:m = B= =7kg,
B g 10N/kg
B的体积:V=L3=(0.1m)3=0.001m3,
B
m 7kg
B的密度:ρ = B= =7×103kg/m3;
B V 0.001m3
B
(3)B的底面积:S=L2=(0.1m)2=0.01m2,
B
F
由p= 可得,B对地面的最大压力:F ′=pS=4×103Pa×0.01m2=40N,
S 压 B
杠杆右端受到的拉力:F ′=G﹣F ′=70N﹣40N=30N,
右 B 压
l 0.2m
物体A的最小重力:G′=F ′= 2 F ′= ×30N=12N。
A 左 l 右 0.5m
1
答:(1)此时杠杆左端所受拉力大小为20N;(2)正方体B的密度为7×103kg/m3;
(3)物体A的重力至少为12N。
资料整理【淘宝店铺:向阳百分百】资料整理【淘宝店铺:向阳百分百】

