文档内容
机密★ 考试结束前
温州市普通高中2026届高三第二次适应性考试
技术试题卷
2026.4
考生须知:
1.本试卷分两部分,第一部分信息技术,第二部分通用技术。全卷共12页,第一部分1至6
页,第二部分7至12页。满分100分,考试时间90分钟。
2.答题前,请务必将自己的姓名、准考证号用黑色字迹的签字笔或钢笔填写在试题卷和答
题卷规定的位置上。
3.答题时,请按照答题卷上“注意事项”的要求,在答题卷相应的位置上规范作答,在本
试题卷上的作答一律无效。
4.非选择题的答案须用黑色字迹的签字笔或钢笔写在答题卷上相应区域内,作图时可先使
用2B铅笔,确定后须用黑色字迹的签字笔或钢笔描黑。
第一部分 信息技术(共50分)
一、选择题(本大题共12小题,每小题2分,共24分。每小题列出的四个备选项中只有一个
是符合题目要求的,不选、错选、多选均不得分)
阅读以下材料,回答第1-6题
某云上园博系统借助摄像头采集、无人机航拍和大模型技术生成种植点位规划。管理员打
开云上园博APP,在种植登记页面输入相关信息,上传苗木照片至服务器端,系统生成该苗木
二维码。养护人员扫码后,可在手机上显示苗木信息。此外,园内配备了重载无人机用于运输,
用户可实时查询飞行轨迹等数据。
1.下列关于该系统中数据的说法,正确的是
A.该系统中所有数据都属于结构化数据 B.服务器中的苗木照片是模拟信号
C.重载无人机飞行过程中会产生新数据 D.苗木全部信息存储在二维码中
2.下列关于该系统组成的说法,正确的是
A.养护人员的手机属于该系统的终端设备 B.该系统的用户为管理员
C.该云上园博APP属于系统软件 D.摄像头的画面采集功能不需要软件支持
3.下列关于该系统功能与应用的说法,正确的是
A.系统无法对多棵苗木的信息进行汇总分析
B.种植点位规划前无需查询历史苗木种植信息
C.借助大模型技术生成种植点位规划使用了人工智能技术
D.无人机的飞行数据仅在飞行结束后统一上传至服务器
4.下列关于该系统网络技术的说法,正确的是
A.无人机飞行轨迹的实时传输依赖于无线网络技术
B.养护人员仅通过移动通信网络扫码查看苗木信息
C.摄像头传输数据时无需遵循网络协议
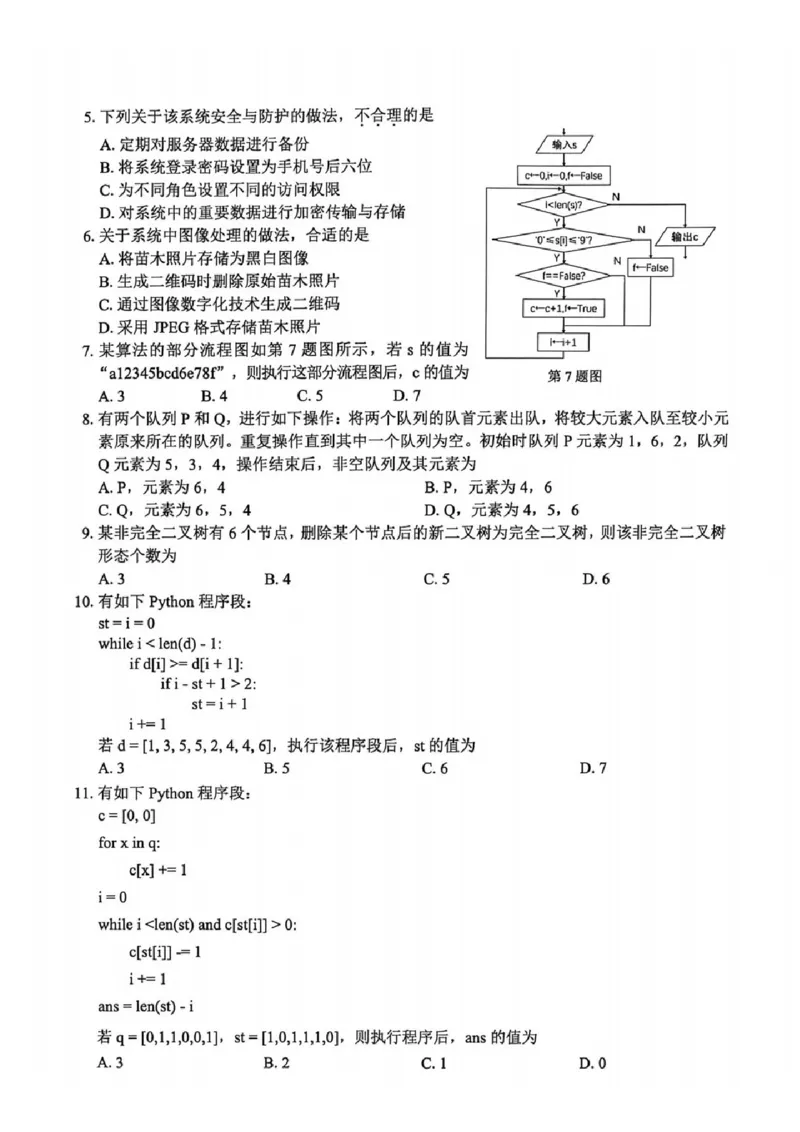
D.该系统不能通过互联网实现数据资源共享5.下列关于该系统安全与防护的做法,不合理的是
4
A.定期对服务器数据进行备份
输入s
B.将系统登录密码设置为手机号后六位
c-0.it-0,1—False
C.为不同角色设置不同的访问权限
N
l=d[i+1]:
ifi-st+1>2:
st=i+1
i+=1
若d=[1,3,5,5,2,4,4,6],执行该程序段后,st的值为
A.3 B.5 C.6 D.7
11.有如下Python程序段:
c=[0,0]
for x in q:
c[x]+=1
i=0
while i0:
c[st[i]]=1
i+=1
ans=len(st)-i
若q=[0,1,1,0,0,1],st=[1,0,1,1,1,0],则执行程序后,ans的值为
A.3 B.2 C.1 D.012.有如下Python程序:
#输入m,代码略
i=m;j=0
whileja[i]:
t=a[i]
for k in range(i,j,-1):
a[k]=a[k-1]
a[j]=t
i+=1
j+=1
若a为[1,5,x,4,6,7],执行程序后a中数据满足a[0]≤a[1]≤.≤a[n-1],则m,x不可能为
A.2,4 B.2,5 C.3,6 D.3,10
二、综合题(本大题共3小题,其中第13小题7分,第14小题10分,第15小题9分,共26分)
13.某物流转运中心采用大、小车转运货品,物流转运系统根据货品到达信息提前判断派发车型,
超过k件派发大车,否则派发小车。每分钟读取一次货品到达信息,0表示无货品到达,1
表示有一件货品到达。每m分钟派发一次车辆。请回答下列问题。
(1)系统从第1分钟开始运行,前10分钟采集到的数据依次为1,0,0,0,1,0,0,0,1,1。若k=5,
m=10,则系统_▲(选填字母:A.可提前/B.无法提前)判断出派发车型。
(2)编写程序模拟上述判断过程,在划线处填上合适的代码。
#输入k,m的值,代码略
while True:
①
data=□;i=0
while ik:
#根据货品数量提前通知派发车型,代码略
break
i+=1
#延时1分钟,代码略
if ③:
# 未发送提前通知,读取最后一个数据并派车,代码略
else:
# 已发送提前通知,读取后续货品数据直至派车,代码略14.某园艺中心提供云养花服务,实体养护由客户通过手机App在线认养的植物,客户可实时
查看通过系统中摄像头采集的植物画面。园艺中心还搭建了智能系统,智能终端连接各类传
感器和执行器,采集数据后传输至服务器数据库中,并根据植物需要进行灌溉、通风等操作。
请回答下列问题。
(1)若湿度传感器型号相同,为提高湿度数据的精准性,一个智能终端连接 ▲(单选)。
A.多个湿度传感器 B.一个湿度传感器
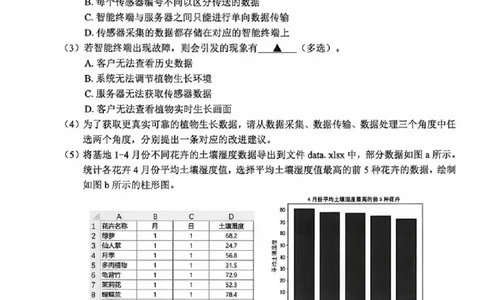
(2)下列关于该系统的说法,正确的有▲(多选)。
A.该系统实现了对植物生长环境的智能调节
B.每个传感器编号不同以区分传送的数据
C.智能终端与服务器之间只能进行单向数据传输
D.传感器采集的数据都存储在对应的智能终端上
(3)若智能终端出现故障,则会引发的现象有▲(多选)。
A.客户无法查看历史数据
B.系统无法调节植物生长环境
C.服务器无法获取传感器数据
D.客户无法查看植物实时生长画面
(4)为了获取更真实可靠的植物生长数据,请从数据采集、数据传输、数据处理三个角度中任
选两个角度,分别提出一条对应的改进建议。
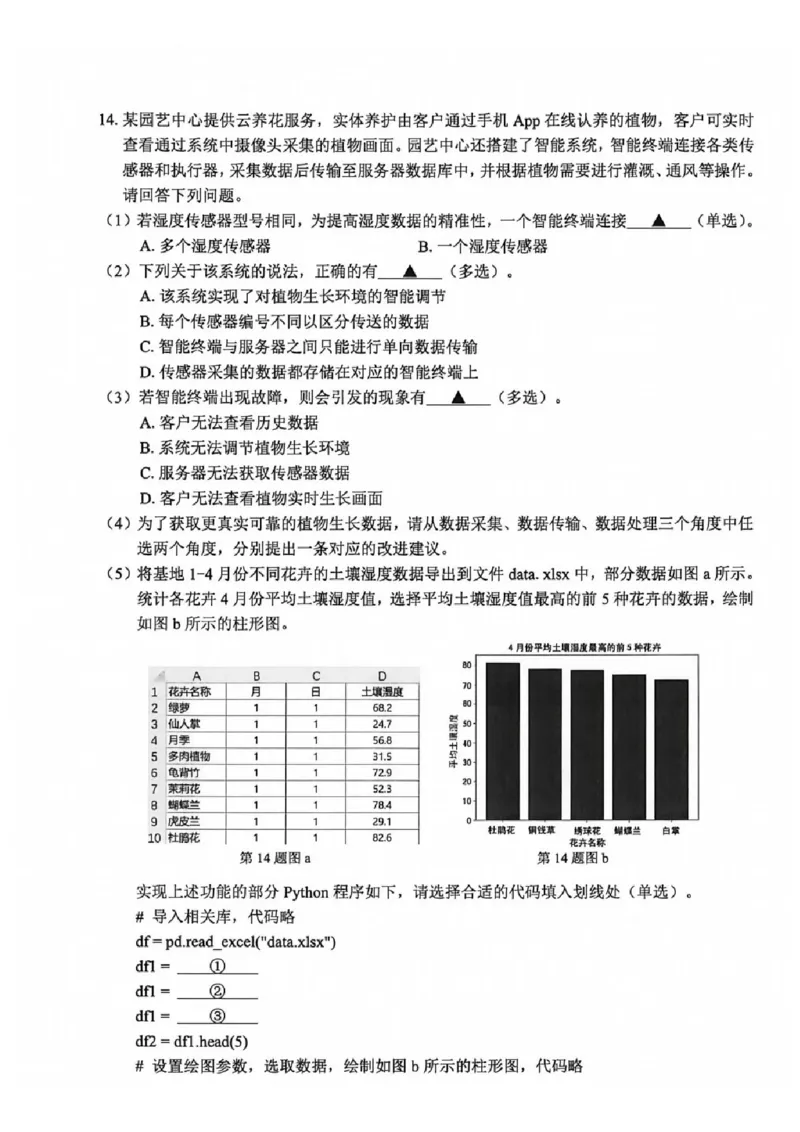
(5)将基地1-4月份不同花卉的土壤湿度数据导出到文件 data.xlsx中,部分数据如图a所示。
统计各花卉4月份平均土壤湿度值,选择平均土壤湿度值最高的前5种花卉的数据,绘制
如图b所示的柱形图。
4月份平均土壤湿度最高的前5种花卉
80
A B C D
70
1花卉名称 月 日 土壤湿度
2 绿萝 1 1 68.2 80
3仙人掌 1 1 24.7 平均土壤温度 50
4 月季 1 1 56.8 40
5 多肉植物 1 1 31.5
30
6 龟背竹 1 1 72.9
20
7 茉莉花 1 1 52.3
8蝴蝶兰 1 1 78.4 10
9 虎皮兰 1 1 29.1 0
10 杜鹃花 1 1 82.6 杜鹃花铜钱草 绣球花蝴蠕兰 白掌
花卉名称
第14题图a 第14题图b
实现上述功能的部分Python程序如下,请选择合适的代码填入划线处(单选)。
# 导入相关库,代码略
df=pd.read_excel("data.xlsx")
dfl=①
dfl=②
dfl=③
df2= dfl.head(5)
#设置绘图参数,选取数据,绘制如图b所示的柱形图,代码略程序中①②③处可选的代码有:
A.df[df"月"]=4]
B.dfI[df1.月=4]
C.dfl.groupby("土壤湿度",as_index=False).mean()
D.dfl.groupby("花卉名称",as_index=False).mean(
E.dfl.sort_values("土壤湿度",ascending=False)
F.dfl.sort_values("花卉名称",ascending=True)
15.某车间有多类设备,设备用于承接并完成订单对应的各类生产任务。为减少设备启停带来的
损耗,若某订单的完成时刻与后续订单的开始时刻相同,且所需的设备类型一致,则合并订
单,安排该设备不间断运行。车间根据合并后的订单,优先分配完成时刻最早的该类设备。
每台设备一次只能处理一个订单。请回答下列问题。
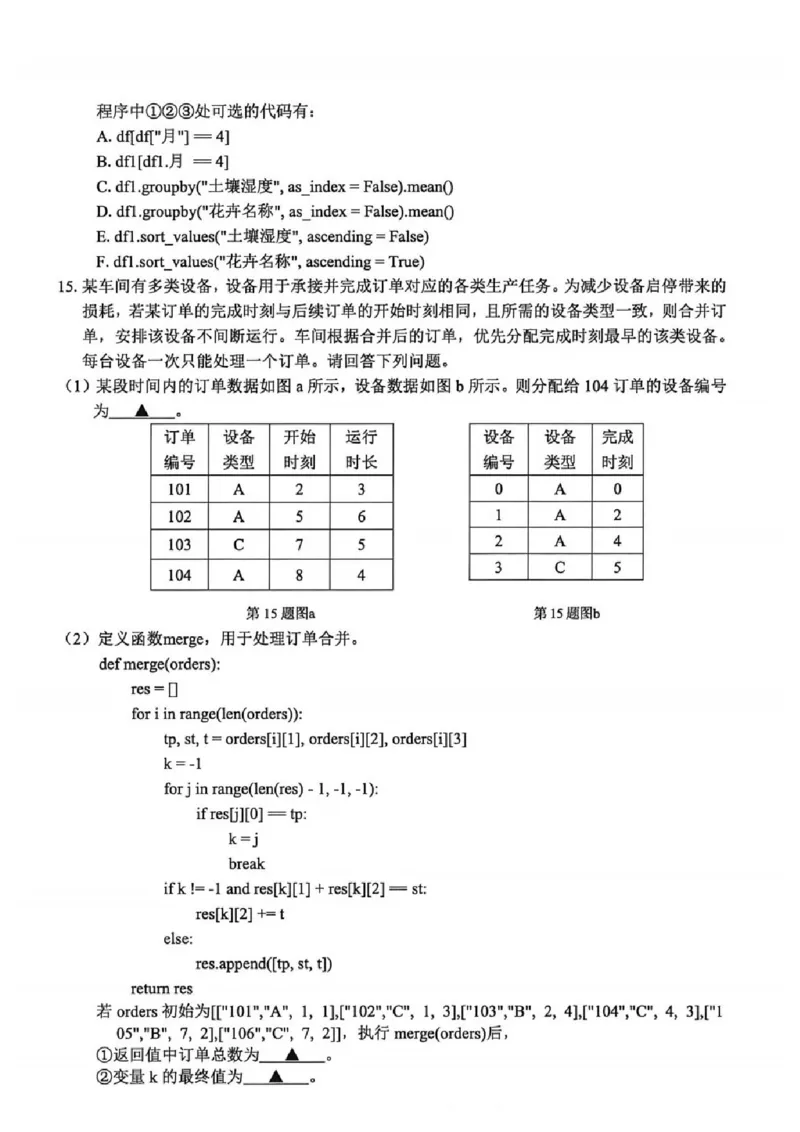
(1)某段时间内的订单数据如图a所示,设备数据如图b所示。则分配给104订单的设备编号
为_▲。
订单 设备 开始 运行 设备 设备 完成
编号 类型 时刻 时长 编号 类型 时刻
101 A 2 3 0 A 0
102 A 5 6 1 A 2
103 C 7 5 2 A 4
3 C 5
104 A 8 4
第15题图a 第15题图b
(2)定义函数merge,用于处理订单合并。
def merge(orders):
res=1
for i in range(len(orders)):
tp, st,t=orders[i][1], orders[i][2],orders[i][3]
k=-1
forjin range(len(res)-1,-1,-1):
if res[j][0]=tp:
k=j
break
ifk!=-1 and res[k][1]+res[k][2]=st:
res[k][2]+=t
else:
res.append([tp, st,t])
return res
若orders 初始为[["101","A",1,1],["102","C",1,3],["103","B",2,4],["104","C",4,3],["1
05","B",7,2],["106","C",7,2]],执行merge(orders)后,
①返回值中订单总数为▲_。
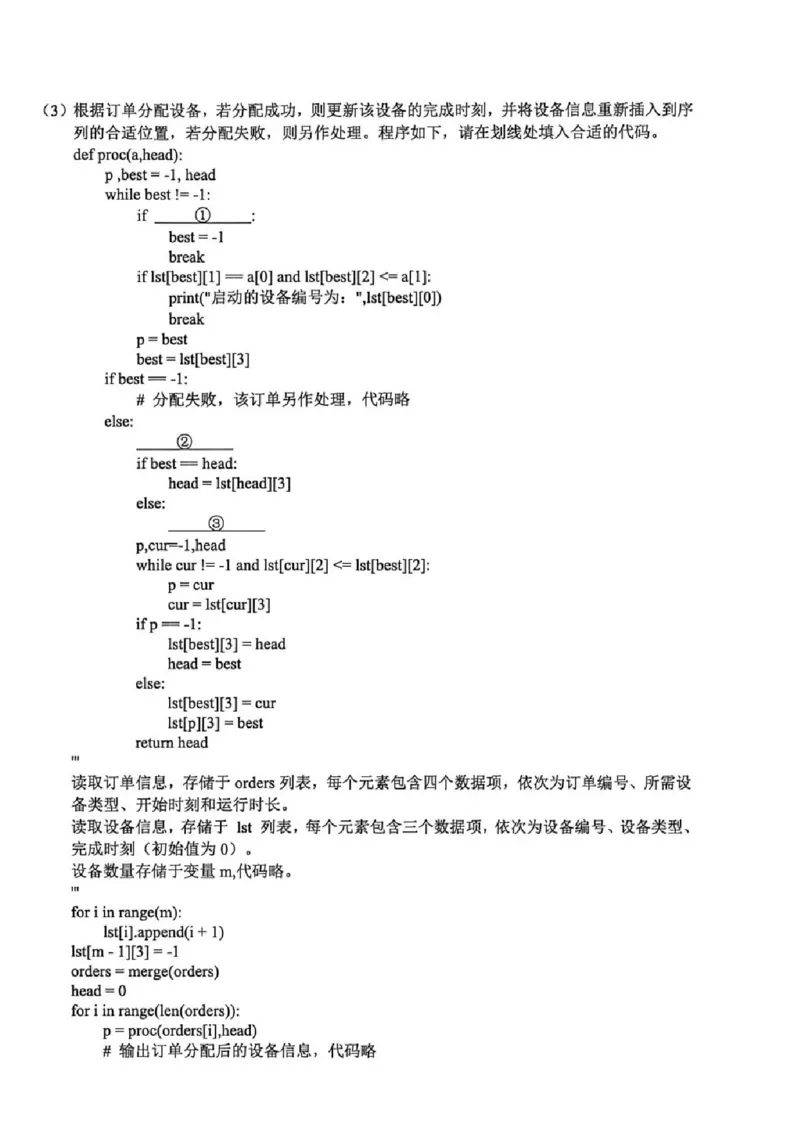
②变量k的最终值为 ▲_。(3)根据订单分配设备,若分配成功,则更新该设备的完成时刻,并将设备信息重新插入到序
列的合适位置,若分配失败,则另作处理。程序如下,请在划线处填入合适的代码。
def proc(a,head):
p,best=-1, head
while best !=-1:
if①__:
best=-1
break
if lst[best][1]=a[0] and lst[best][2]<=a[1]:
print("启动的设备编号为:",lst[best][0])
break
p=best
best=lst[best][3]
if best=-1:
# 分配失败,该订单另作处理,代码略
else:
②
if best=head:
head=lst[head][3]
else:
③
p,cur=-1,head
while cur!=-1 and lst[cur][2]<=lst[best][2]:
p=cur
cur=lst[cur][3]
ifp=-1:
lst[best][3]=head
head=best
else:
lst[best][3]=cur
lst[p][3]=best
return head
用
读取订单信息,存储于orders列表,每个元素包含四个数据项,依次为订单编号、所需设
备类型、开始时刻和运行时长。
读取设备信息,存储于lst 列表,每个元素包含三个数据项,依次为设备编号、设备类型、
完成时刻(初始值为0)。
设备数量存储于变量m,代码略。
m
for i in range(m):
lst[i].append(i+1)
lst[m-1][3]=-1
orders=merge(orders)
head=0
for i in range(len(orders)):
p=proc(orders[i],head)
#输出订单分配后的设备信息,代码略第二部分 通用技术(50分)
三、选择题(本大题共12小题,每小题2分,共24分。每小题列出的四个备选项中只有一个
是符合题目要求的,不选、多选、错选均不得分)
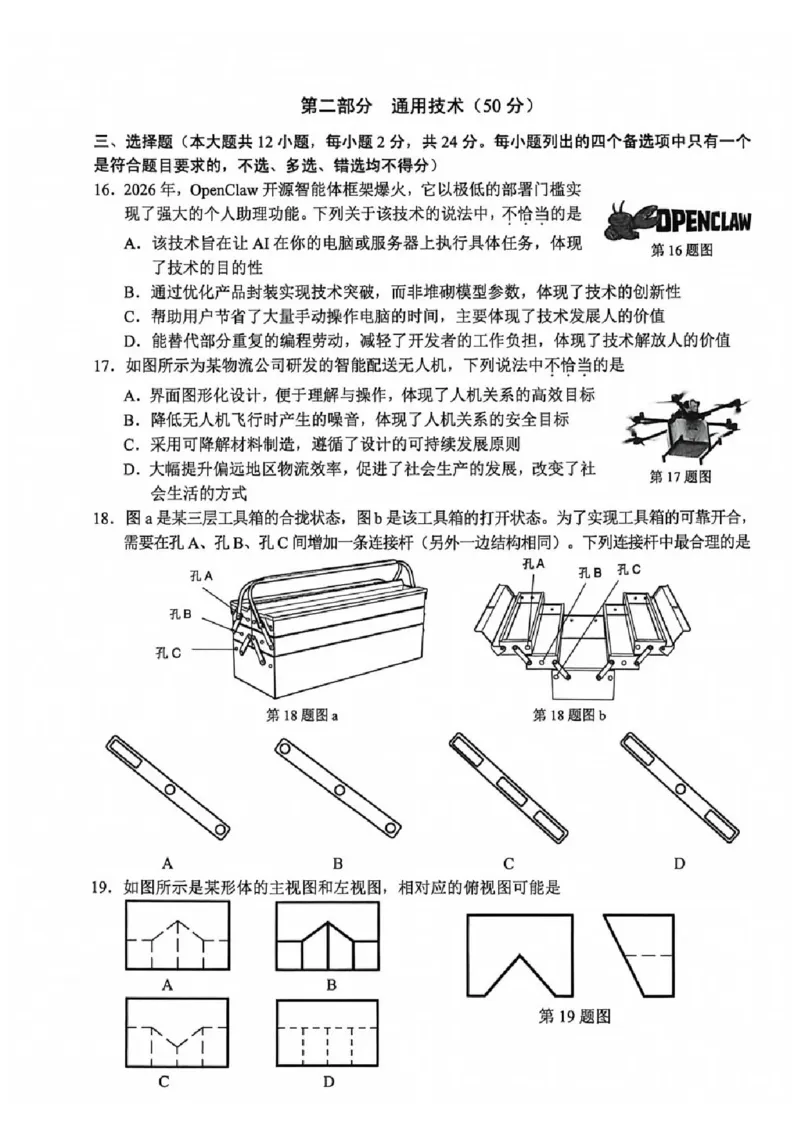
16.2026年,OpenClaw开源智能体框架爆火,它以极低的部署门槛实
现了强大的个人助理功能。下列关于该技术的说法中,不恰当的是
LAW
A.该技术旨在让AI在你的电脑或服务器上执行具体任务,体现
第16题图
了技术的目的性
B.通过优化产品封装实现技术突破,而非堆砌模型参数,体现了技术的创新性
C.帮助用户节省了大量手动操作电脑的时间,主要体现了技术发展人的价值
D.能替代部分重复的编程劳动,减轻了开发者的工作负担,体现了技术解放人的价值
17.如图所示为某物流公司研发的智能配送无人机,下列说法中不恰当的是
A.界面图形化设计,便于理解与操作,体现了人机关系的高效目标
B.降低无人机飞行时产生的噪音,体现了人机关系的安全目标
C.采用可降解材料制造,遵循了设计的可持续发展原则
D.大幅提升偏远地区物流效率,促进了社会生产的发展,改变了社
第17题图
会生活的方式
18.图a是某三层工具箱的合拢状态,图b是该工具箱的打开状态。为了实现工具箱的可靠开合,
需要在孔A、孔B、孔C间增加一条连接杆(另外一边结构相同)。下列连接杆中最合理的是
孔A
孔B 孔C
孔A
孔B
孔C 6
o
d
第18题图a 第18题图b
◎
O ◎ O
◎ ◎
A B C D
19.如图所示是某形体的主视图和左视图,相对应的俯视图可能是
A B
第19题图
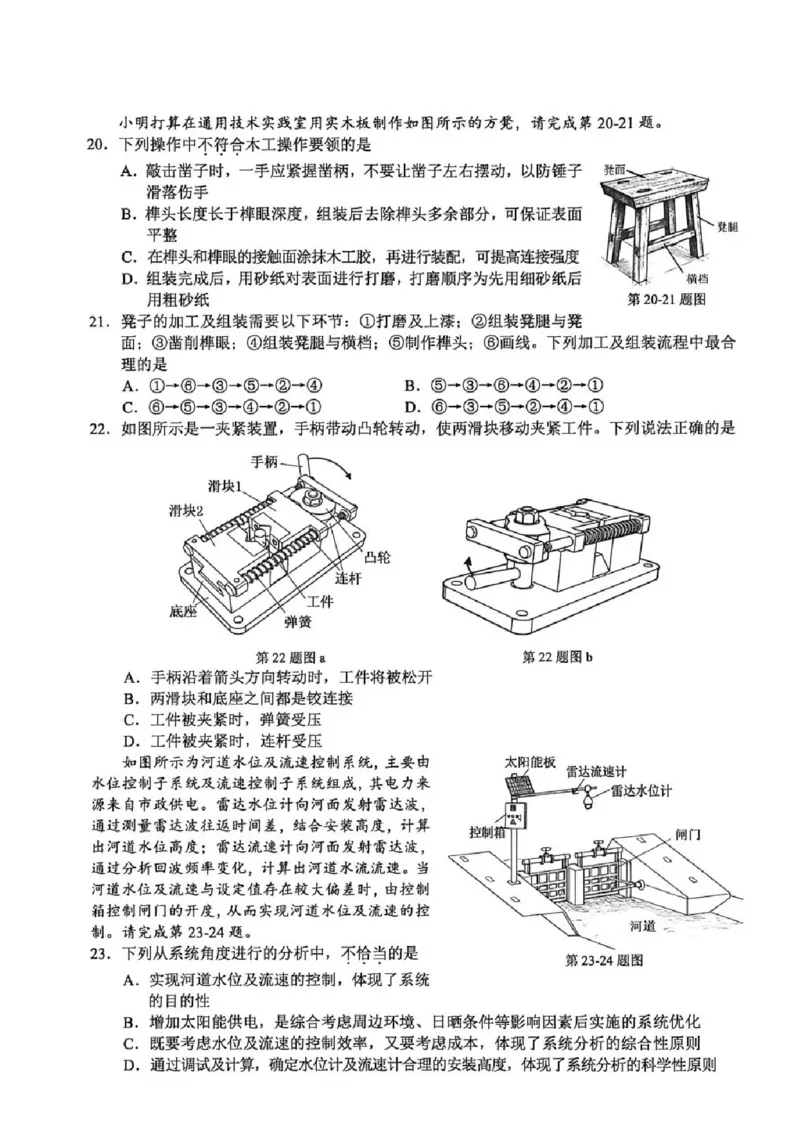
C D小明打算在通用技术实践室用实木板制作如图所示的方凳,请完成第20-21题。
20.下列操作中不符合木工操作要领的是
A.敲击凿子时,一手应紧握凿柄,不要让凿子左右摆动,以防锤子 凳面、
滑落伤手
B.榫头长度长于榫眼深度,组装后去除榫头多余部分,可保证表面
凳腿
平整
C.在榫头和榫眼的接触面涂抹木工胶,再进行装配,可提高连接强度
D.组装完成后,用砂纸对表面进行打磨,打磨顺序为先用细砂纸后 横档
用粗砂纸 第20-21题图
21.凳子的加工及组装需要以下环节:①打磨及上漆;②组装凳腿与凳
面;③凿削榫眼;④组装凳腿与横档;⑤制作榫头;⑥画线。下列加工及组装流程中最合
→
理的是
A.①→⑥→③-→⑤→②→④ B.⑤→③→⑥)→(④ ②→①
C.⑥→⑤→③→④-→(②→① D.⑥→③→⑤- →(②→④→①
22.如图所示是一夹紧装置,手柄带动凸轮转动,使两滑块移动夹紧工件。下列说法正确的是
手柄
滑块1、
滑块2
or
0
凸轮
o
连杆
工件
底座
0 O
弹簧
第22题图a 第22题图b
A.手柄沿着箭头方向转动时,工件将被松开
B.两滑块和底座之间都是铰连接
C.工件被夹紧时,弹簧受压
D.工件被夹紧时,连杆受压
如图所示为河道水位及流速控制系统,主要由 太阳能板
雷达流速计
水位控制子系统及流速控制子系统组成,其电力来
雷达水位计
毛
源来自市政供电。雷达水位计向河面发射雷达波,
B
2
通过测量雷达波往返时间差,结合安装高度,计算
控制箱 闸门
出河道水位高度;雷达流速计向河面发射雷达波, B 男
通过分析回波频率变化,计算出河道水流流速。当
河道水位及流速与设定值存在较大偏差时,由控制
箱控制闸门的开度,从而实现河道水位及流速的控
河道
制。请完成第23-24题。
23.下列从系统角度进行的分析中,不恰当的是
第23-24题图
A.实现河道水位及流速的控制,体现了系统
的目的性
B.增加太阳能供电,是综合考虑周边环境、日晒条件等影响因素后实施的系统优化
C.既要考虑水位及流速的控制效率,又要考虑成本,体现了系统分析的综合性原则
D.通过调试及计算,确定水位计及流速计合理的安装高度,体现了系统分析的科学性原则24.下列从控制系统角度进行的分析中,恰当的是
A.河道堵塞导致水流减小,属于流速控制子系统的干扰因素
B.流速控制子系统的被控对象是雷达流速计
C.水位控制子系统的控制量是雷达波往返时间差
D.水位控制子系统的输入量是河道实际水位
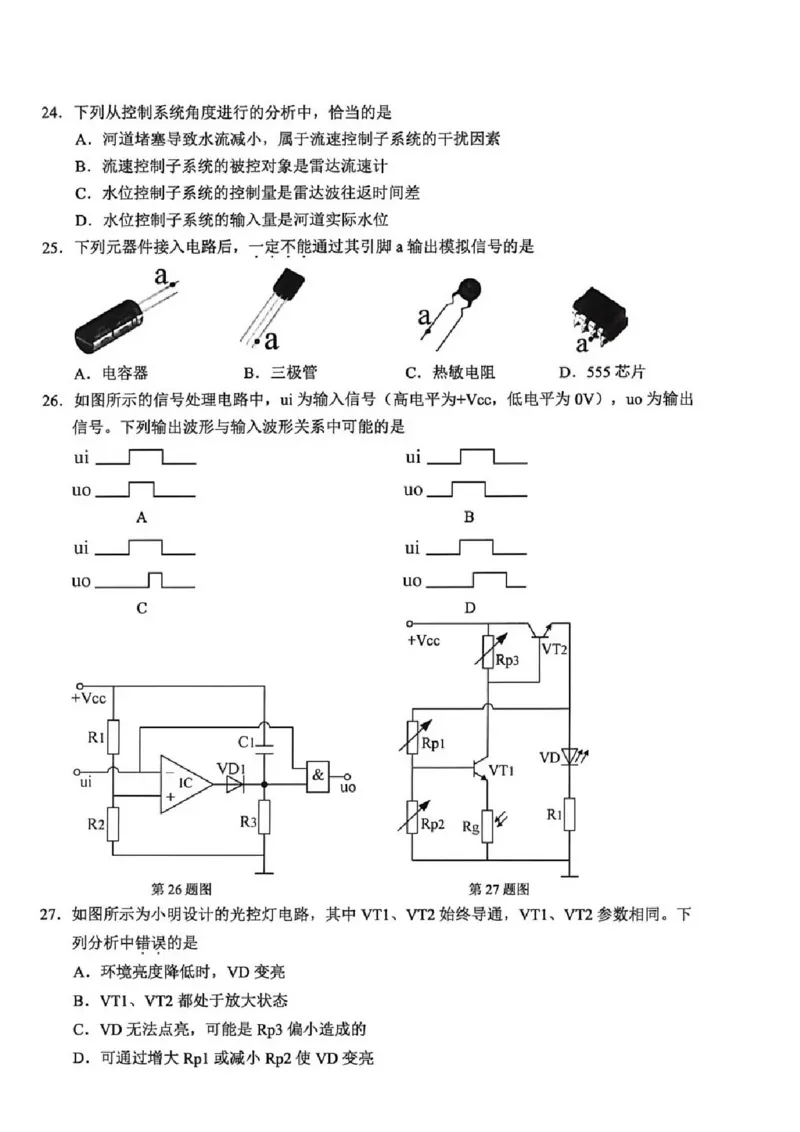
25.下列元器件接入电路后,一定不能通过其引脚a输出模拟信号的是
a.
a
·a
a
A.电容器 B.三极管 C.热敏电阻 D. 555芯片
26.如图所示的信号处理电路中,ui为输入信号(高电平为+Vcc,低电平为0V),uo为输出
信号。下列输出波形与输入波形关系中可能的是
ui ui
uo.
uo_L
A B
ui ui
uo. uo.
C D
O
+Vcc
VT2
Rp3
O-
+Vcc
R1 C1 Rp1
VD_ 711
VD! & VT1
Ou-i IC uOo
+
RI
R2 R3 Rp2 Rg
第26题图 第27题图
27.如图所示为小明设计的光控灯电路,其中VT1、VT2始终导通,VT1、VT2参数相同。下
列分析中错误的是
A.环境亮度降低时,VD变亮
B. VT1、VT2都处于放大状态
C.VD无法点亮,可能是Rp3偏小造成的
D.可通过增大Rpl或减小Rp2使VD变亮四、综合题(本大题共3小题,其中第28小题8分,第29小题10分,第30小题8分,共26
分。各小题中“______”处填写合适选项的字母编号)
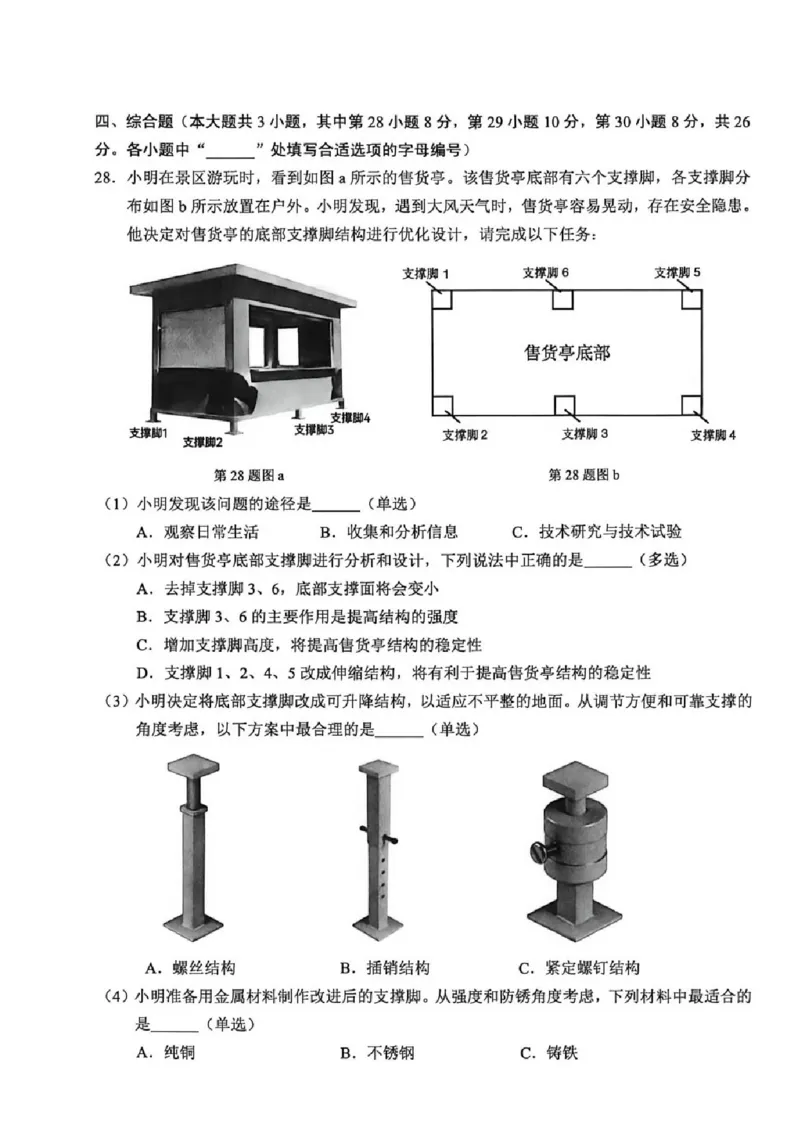
28.小明在景区游玩时,看到如图a所示的售货亭。该售货亭底部有六个支撑脚,各支撑脚分
布如图b所示放置在户外。小明发现,遇到大风天气时,售货亭容易晃动,存在安全隐患。
他决定对售货亭的底部支撑脚结构进行优化设计,请完成以下任务:
支撑脚1 支撑脚6 支撑脚5
售货亭底部
1
支撑脚4
支撑脚1 支撑脚3 支撑脚2 支撑脚3 支撑脚4
支撑脚2
第28题图a 第28题图b
(1)小明发现该问题的途径是______(单选)
A.观察日常生活 B.收集和分析信息 C.技术研究与技术试验
(2)小明对售货亭底部支撑脚进行分析和设计,下列说法中正确的是______(多选)
A.去掉支撑脚3、6,底部支撑面将会变小
B.支撑脚3、6的主要作用是提高结构的强度
C.增加支撑脚高度,将提高售货亭结构的稳定性
D.支撑脚1、2、4、5改成伸缩结构,将有利于提高售货亭结构的稳定性
(3)小明决定将底部支撑脚改成可升降结构,以适应不平整的地面。从调节方便和可靠支撑的
角度考虑,以下方案中最合理的是____(单选)
A.螺丝结构 B.插销结构 C.紧定螺钉结构
(4)小明准备用金属材料制作改进后的支撑脚。从强度和防锈角度考虑,下列材料中最适合的
是_____(单选)
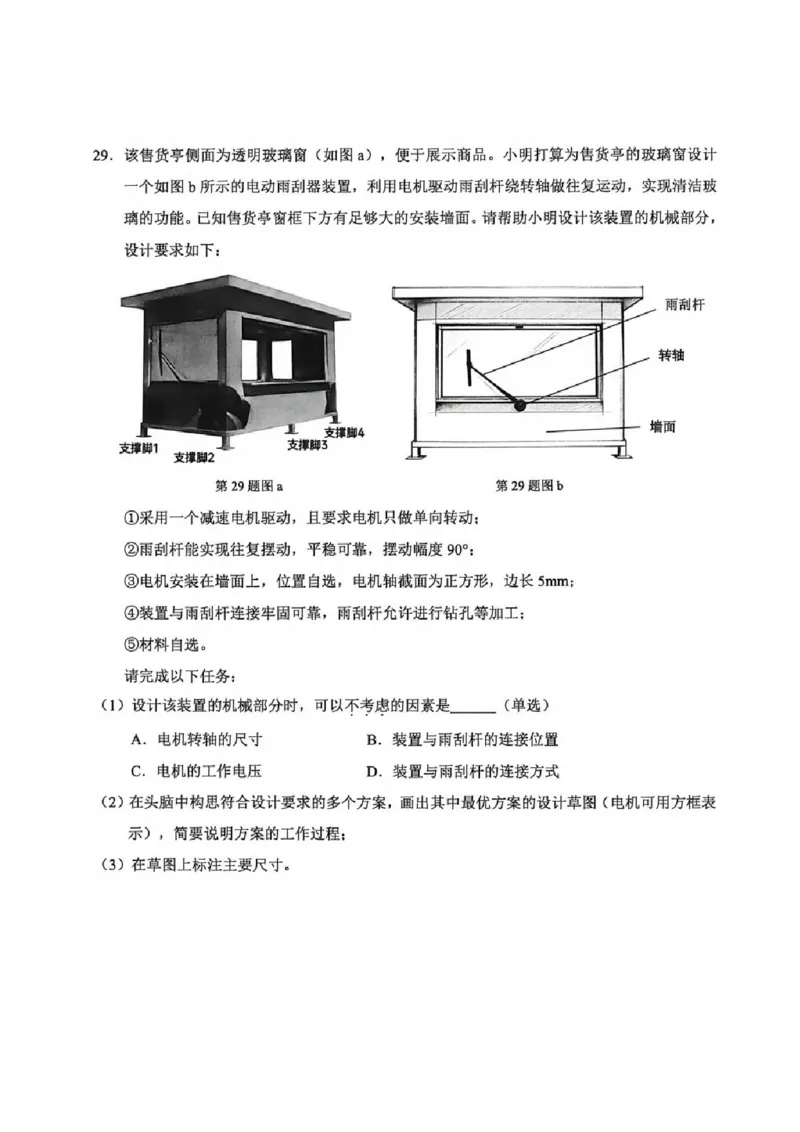
A.纯铜 B.不锈钢 C.铸铁29.该售货亭侧面为透明玻璃窗(如图a),便于展示商品。小明打算为售货亭的玻璃窗设计
一个如图b所示的电动雨刮器装置,利用电机驱动雨刮杆绕转轴做往复运动,实现清洁玻
璃的功能。已知售货亭窗框下方有足够大的安装墙面。请帮助小明设计该装置的机械部分,
设计要求如下:
雨刮杆
转轴
墙面
支撑脚4
支撑脚1 支撑脚3
支撑脚2
第29题图a 第29题图b
①采用一个减速电机驱动,且要求电机只做单向转动;
②雨刮杆能实现往复摆动,平稳可靠,摆动幅度90°;
③电机安装在墙面上,位置自选,电机轴截面为正方形,边长5mm;
④装置与雨刮杆连接牢固可靠,雨刮杆允许进行钻孔等加工:
⑤材料自选。
请完成以下任务:
(1)设计该装置的机械部分时,可以不考虑的因素是____(单选)
A.电机转轴的尺寸 B.装置与雨刮杆的连接位置
C.电机的工作电压 D.装置与雨刮杆的连接方式
(2)在头脑中构思符合设计要求的多个方案,画出其中最优方案的设计草图(电机可用方框表
示),简要说明方案的工作过程:
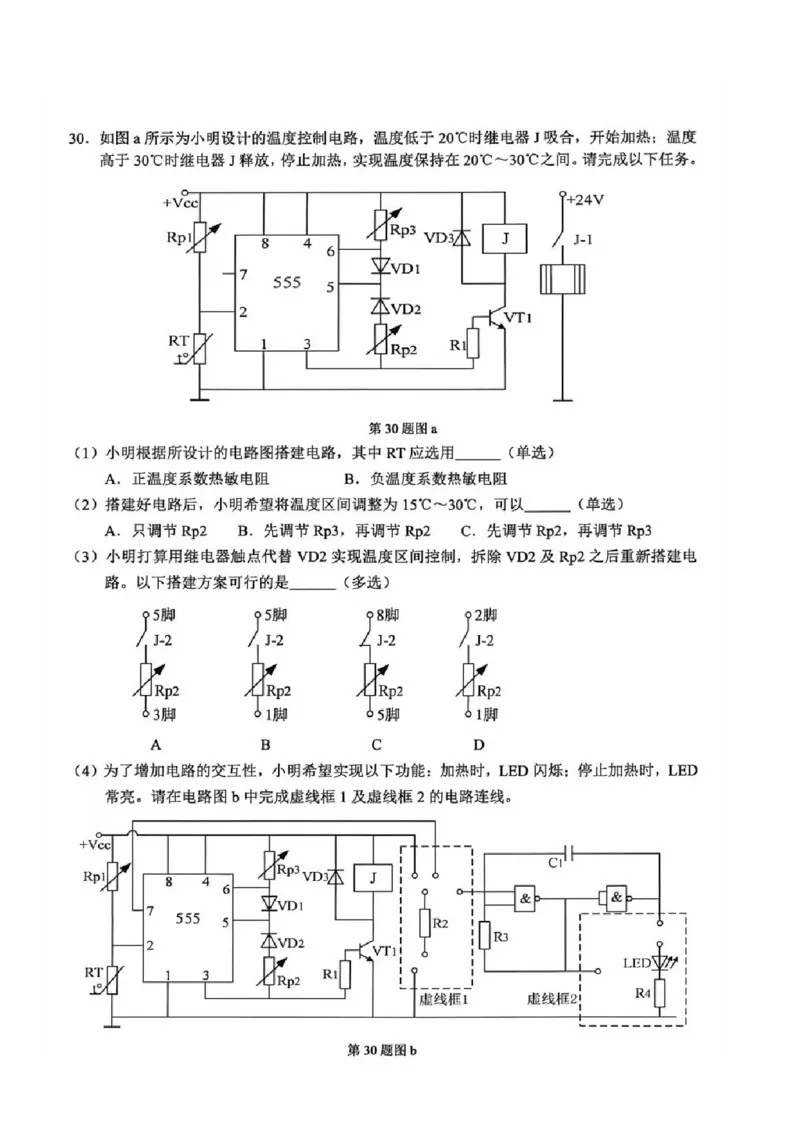
(3)在草图上标注主要尺寸。30.如图a所示为小明设计的温度控制电路,温度低于20℃时继电器J吸合,开始加热;温度
高于30℃时继电器J释放,停止加热,实现温度保持在20℃~30℃之间。请完成以下任务。
9+24V
O-
+Vcc
Rp3
Rpi 8 4 VD3本 J J-1
6
ZVD1
7
555
5
VD2
2
VT1
RT 1 3 Rp2 R1
1
第30题图a
(1)小明根据所设计的电路图搭建电路,其中RT应选用___(单选)
A.正温度系数热敏电阻 B.负温度系数热敏电阻
(2)搭建好电路后,小明希望将温度区间调整为15℃~30℃,可以____(单选)
A.只调节Rp2 B.先调节Rp3,再调节Rp2C.先调节Rp2,再调节Rp3
(3)小明打算用继电器触点代替VD2实现温度区间控制,拆除VD2及Rp2之后重新搭建电
路。以下搭建方案可行的是_____(多选)
o
o5脚 95脚 98脚 2脚
J-2 J-2 J-2 J-2
Rp2 Rp2 Rp2 Rp2
O3脚 61脚 65脚 O1脚
A B C D
(4)为了增加电路的交互性,小明希望实现以下功能:加热时,LED闪烁;停止加热时,LED
常亮。请在电路图b中完成虚线框1及虚线框2的电路连线。
+Vc0c
Ci
Rp3
Rpi 8 VD3本 J
4 6
0 O & &
ZVD1
7
555
5 R2 6
VD2 R3 o
2
VT1
LED
RT 3 Rp2 R1
1°% R4
虚线框1 虚线框2
第30题图b

