夜雨聆风
夜雨聆风





libeio库源码分析系列(七)
源码分析mettle后门工具学习 所使用的依赖库
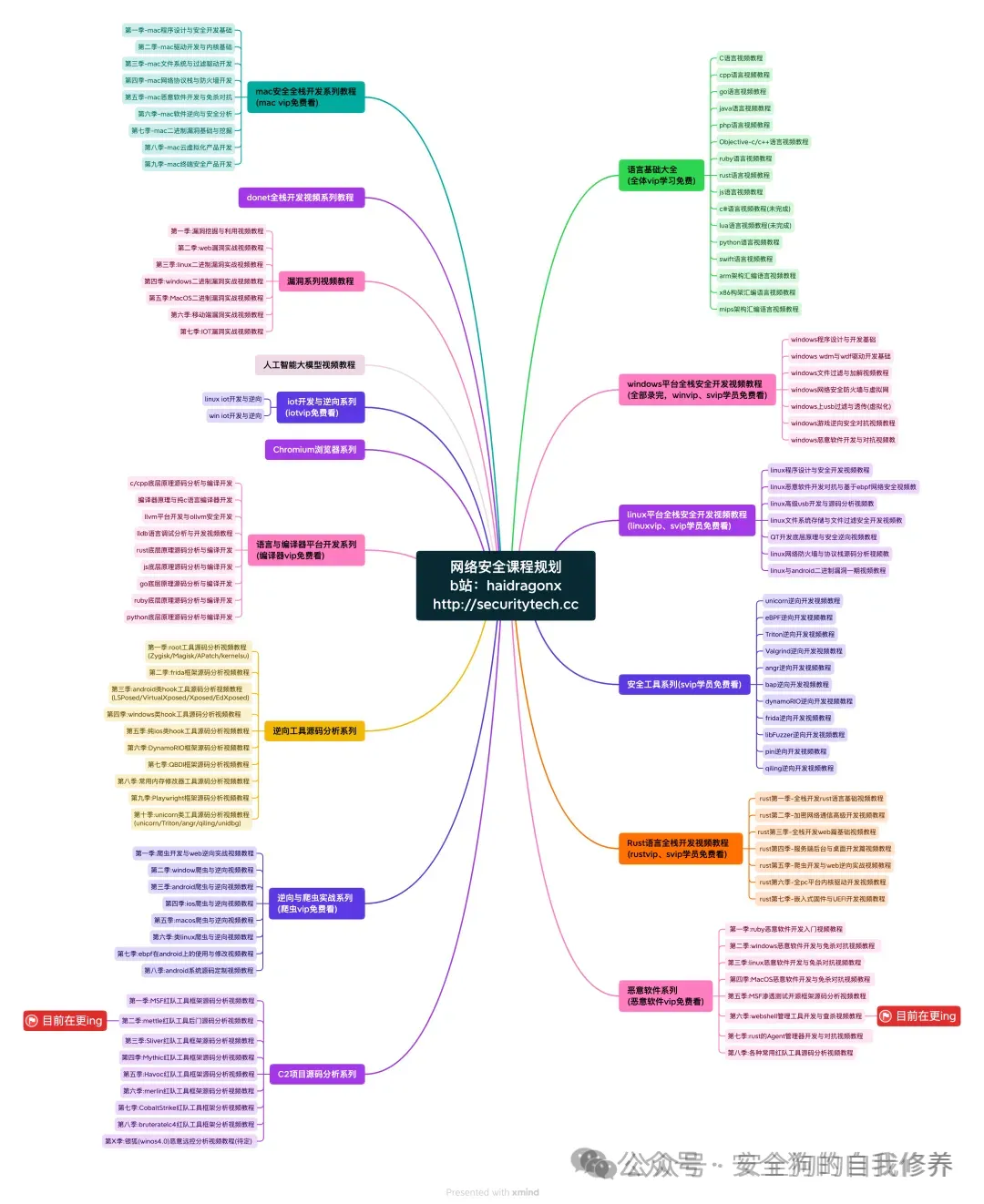
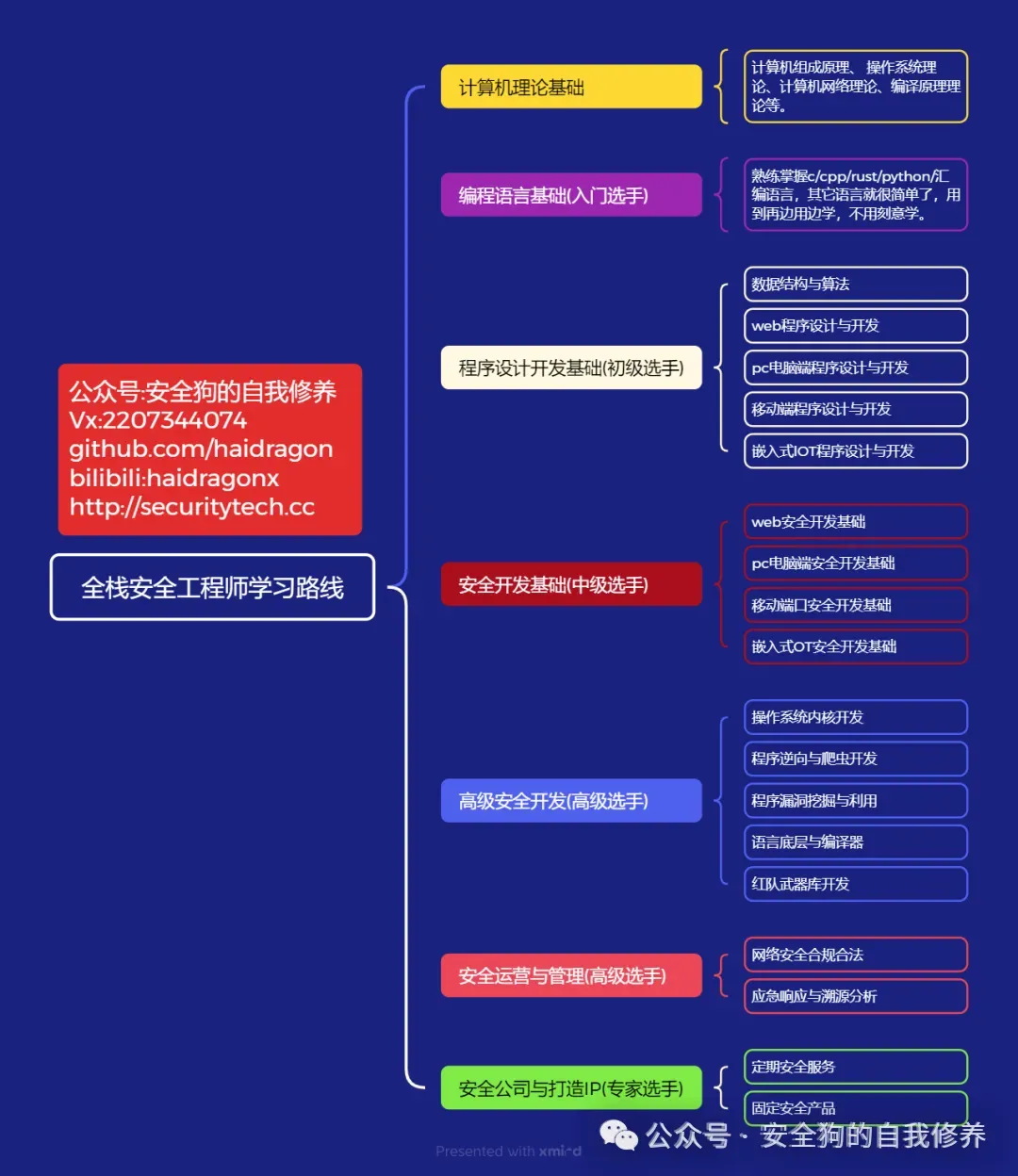
官网:http://securitytech.cc

libeio 请求队列设计深度分析(基于源码)
📋 请求队列架构概述
基于libeio 1.0.2实际源码分析,请求队列系统采用多优先级队列设计,通过etp_reqq结构体实现,支持从EIO_PRI_MIN(-4)到EIO_PRI_MAX(4)的9个优先级级别。队列设计充分考虑了并发访问、优先级调度和性能优化需求。
🏗️ 核心队列数据结构(源码级分析)
请求队列结构体
/** * 源码位置: etp.c line 110-115 * 实际的请求队列实现 */typedefstruct{ ETP_REQ*qs[ETP_NUM_PRI], *qe[ETP_NUM_PRI]; /* qstart, qend */intsize; } etp_reqq;/** * 源码位置: etp.c line 136-142 * 线程池中的队列实例 */structetp_pool{ etp_reqqreq_queue; // 请求队列(生产者-消费者)etp_reqqres_queue; // 结果队列(完成通知)// 队列相关的计数器和配置unsigned intnreqs; // 总请求数(reqlock保护)unsigned intnready; // 就绪请求数(reqlock保护)unsigned intnpending; // 挂起请求数(reqlock保护)xmutex_treqlock; // 请求队列互斥锁xcond_treqwait; // 请求等待条件变量};
优先级配置
/** * 源码位置: eio.h line 423-427 和 etp.c line 63-64 * 优先级范围定义 */// eio.h中的公共定义#defineEIO_PRI_MIN -4 /* minimum priority */#defineEIO_PRI_MAX 4 /* maximum priority */#defineEIO_PRI_DEFAULT 0 /* default priority */// etp.c中的内部定义#ifndefETP_PRI_MIN# defineETP_PRI_MIN 0# defineETP_PRI_MAX 0#endif#defineETP_NUM_PRI (ETP_PRI_MAX - ETP_PRI_MIN + 1) // 优先级数量计算
🔧 队列操作核心实现(源码详解)
队列初始化
/** * 源码位置: etp.c line 233-242 * 请求队列初始化实现 */staticvoidecb_noinlineecb_coldreqq_init (etp_reqq*q) { intpri; // 初始化所有优先级队列为空for (pri=0; pri<ETP_NUM_PRI; ++pri) q->qs[pri] =q->qe[pri] =0; q->size=0; // 队列大小清零}/** * 源码位置: etp.c line 294-295 * 线程池初始化中的队列创建 */ETP_API_DECLintecb_coldetp_init (etp_poolpool, void*userdata, void (*want_poll)(void*userdata), void (*done_poll)(void*userdata)) { // ... 其他初始化代码 ...reqq_init (&pool->req_queue); // 初始化请求队列reqq_init (&pool->res_queue); // 初始化结果队列// ... 其他初始化代码 ...}
请求入队操作
/** * 源码位置: etp.c line 244-258 * 请求推入队列的实现 */staticintecb_noinlinereqq_push (etp_reqq*q, ETP_REQ*req) { intpri=req->pri; // 获取请求优先级req->next=0; // 清除next指针// 🎯 优先级队列插入逻辑if (q->qe[pri]) // 队列非空 { q->qe[pri]->next=req; // 链接到队尾q->qe[pri] =req; // 更新队尾指针 } else// 队列为空q->qe[pri] =q->qs[pri] =req; // 设置队首和队尾returnq->size++; // 增加队列大小并返回}/** * 源码位置: etp.c line 588-598 * 请求提交到线程池的完整流程 */ETP_API_DECLvoidetp_submit (etp_poolpool, ETP_REQ*req) { // 🔧 优先级边界检查和调整req->pri-=ETP_PRI_MIN; if (ecb_expect_false (req->pri<ETP_PRI_MIN-ETP_PRI_MIN)) req->pri=ETP_PRI_MIN-ETP_PRI_MIN; if (ecb_expect_false (req->pri>ETP_PRI_MAX-ETP_PRI_MIN)) req->pri=ETP_PRI_MAX-ETP_PRI_MIN; // 📊 增加请求计数器X_LOCK (pool->reqlock); ++pool->nreqs; ++pool->nready; X_UNLOCK (pool->reqlock); // 📥 将请求推入队列X_LOCK (pool->reqlock); reqq_push (&pool->req_queue, req); X_COND_SIGNAL (pool->reqwait); // 唤醒等待的工作线程X_UNLOCK (pool->reqlock); // 🚀 检查是否需要启动新线程etp_maybe_start_thread (pool); }
请求出队操作
/** * 源码位置: etp.c line 260-285 * 请求从队列取出的实现(优先级调度) */staticETP_REQ*ecb_noinlinereqq_shift (etp_reqq*q) { intpri; // 📊 检查队列是否为空if (!q->size) return0; --q->size; // 减少队列大小// 🎯 优先级调度:从高优先级到低优先级遍历for (pri=ETP_NUM_PRI; pri--; ) // 倒序遍历确保高优先级优先 { ETP_REQ*req=q->qs[pri]; // 获取当前优先级队首if (req) // 找到非空队列 { // 🔗 更新队列指针if (!(q->qs[pri] = (ETP_REQ*)req->next)) q->qe[pri] =0; // 队列变空returnreq; // 返回找到的请求 } } abort (); // 理论上不应该到达这里}
🎯 优先级调度机制(源码实现)
优先级映射和验证
/** * 源码位置: etp.c line 574-581 * 优先级边界处理 */ETP_API_DECLvoidetp_submit (etp_poolpool, ETP_REQ*req) { // 🔧 优先级标准化处理req->pri-=ETP_PRI_MIN; // 转换为内部优先级索引// 🛡️ 边界检查和调整if (ecb_expect_false (req->pri<ETP_PRI_MIN-ETP_PRI_MIN)) req->pri=ETP_PRI_MIN-ETP_PRI_MIN; if (ecb_expect_false (req->pri>ETP_PRI_MAX-ETP_PRI_MIN)) req->pri=ETP_PRI_MAX-ETP_PRI_MIN; // ... 后续处理 ...}
多优先级队列管理
基于源码的多优先级设计理念:
-
9个独立的优先级队列 (EIO_PRI_MIN到EIO_PRI_MAX) -
连续的指针数组存储各优先级队列 -
统一的大小管理机制 -
调度策略:高优先级优先 (倒序遍历)
调度算法复杂度分析:
-
时间复杂度: O(P) 其中P为优先级数量(常数9) -
空间复杂度: O(P) 存储各优先级队列指针
🔒 并发控制和同步机制
线程安全的队列操作
/** * 源码位置: etp.c 多处 * 多层次锁保护机制 */// 1. 请求队列操作锁保护X_LOCK (pool->reqlock);reqq_push (&pool->req_queue, req);X_COND_SIGNAL (pool->reqwait);X_UNLOCK (pool->reqlock);// 2. 计数器操作锁保护X_LOCK (pool->reqlock);++pool->nreqs;++pool->nready;X_UNLOCK (pool->reqlock);// 3. 结果队列操作锁保护X_LOCK (pool->reslock);reqq_push (&pool->res_queue, req);X_UNLOCK (pool->reslock);
条件变量使用模式
/** * 源码位置: etp.c line 354-375 * 工作线程等待机制 */X_LOCK (pool->reqlock);for (;;) { req=reqq_shift (&pool->req_queue); // 尝试获取请求if (ecb_expect_true (req)) // 成功获取到请求break; // ⏰ 空闲线程管理++pool->idle; if (pool->idle <= pool->max_idle) // 未超过最大空闲数X_COND_WAIT (pool->reqwait, pool->reqlock); // 无限期等待else { // 超过最大空闲数,设置超时等待if (!ts.tv_sec) ts.tv_sec=time (0) +pool->idle_timeout; if (X_COND_TIMEDWAIT (pool->reqwait, pool->reqlock, ts) ==ETIMEDOUT) ts.tv_sec=1; // 超时标记 } --pool->idle; }X_UNLOCK (pool->reqlock);
⚡ 性能优化技术(源码级)
无锁计数器优化
/** * 源码位置: etp.c 多处 * 原子计数器操作 */// 简单的原子递增操作++pool->nreqs; // 在锁保护下进行++pool->nready; // 原子性保证++pool->npending; // 无需额外同步// 复杂计数器在锁保护下操作X_LOCK (pool->reqlock);--pool->nreqs;--pool->nready;X_UNLOCK (pool->reqlock);
分支预测优化
/** * 源码位置: etp.c 多处 * 编译器分支预测提示 */// 预测通常能找到请求if (ecb_expect_true (req)) break;// 预测很少发生超时if (ecb_expect_false (ts.tv_sec==1)) { // 超时处理逻辑 }// 预测很少取消if (ecb_expect_false (EIO_CANCELLED (req))) { // 取消处理逻辑 }
内存局部性优化
/** * 源码位置: etp_reqq结构设计 * 缓存友好的数据布局 */typedefstruct{ ETP_REQ*qs[ETP_NUM_PRI], *qe[ETP_NUM_PRI]; /* 连续的指针数组 */intsize; /* 紧跟在指针数组后面 */} etp_reqq;/** * 内存访问模式优化: * 1. 优先级队列指针连续存储,提高缓存命中率 * 2. size字段紧跟指针数组,减少缓存行分裂 * 3. 频繁访问的qs/qe数组放在结构体前面 */
🏭 线程池集成机制
动态线程创建
/** * 源码位置: etp.c line 462-487 * 智能线程创建决策 */staticvoidetp_maybe_start_thread (etp_poolpool) { // 📊 负载评估条件if (ecb_expect_true (etp_nthreads (pool) >= pool->wanted)) return; // 已达到期望线程数// 🧮 线程需求计算if (ecb_expect_true (0 <= (int)etp_nthreads (pool) + (int)etp_npending (pool) - (int)etp_nreqs (pool))) return; // 当前线程足够处理负载// 🚀 启动新工作线程etp_start_thread (pool); }/** * 源码位置: etp.c line 520-535 * 线程池参数配置 */voidetp_set_max_parallel (etp_poolpool, unsigned intnthreads) { if (nthreads>ETP_MAX_PARALLEL) nthreads=ETP_MAX_PARALLEL; pool->wanted=nthreads ? nthreads : 1; // 设置期望线程数}voidetp_set_max_idle (etp_poolpool, unsigned intnthreads) { pool->max_idle=nthreads; // 设置最大空闲线程数}
工作窃取机制
/** * 源码位置: etp.c line 543-561 * 群组请求处理(隐式的工作窃取) */ETP_API_DECLvoidetp_submit (etp_poolpool, ETP_REQ*req) { // 🎯 群组请求特殊处理if (ecb_expect_false (req->type==ETP_TYPE_GROUP)) { /* I hope this is worth it :/ */X_LOCK (pool->reqlock); if (req->size <= (unsigned int)req->int2|| !req->int2) { // 群组立即执行条件++pool->nreqs; ++pool->nready; reqq_push (&pool->req_queue, req); X_COND_SIGNAL (pool->reqwait); } else { // 群组延迟执行(工作窃取效果)req->flags |= ETP_FLAG_DELAYED; } X_UNLOCK (pool->reqlock); return; } // ... 普通请求处理 ...}
📊 队列监控和统计
内置状态查询
/** * 源码位置: eio.c line 2344-2360 * 队列状态查询接口 */unsigned inteio_nreqs (void) { unsigned intcount; X_LOCK (EIO_POOL->reqlock); count=EIO_POOL->nreqs; // 总请求数X_UNLOCK (EIO_POOL->reqlock); returncount; }unsigned inteio_nready (void) { unsigned intcount; X_LOCK (EIO_POOL->reqlock); count=EIO_POOL->nready; // 就绪请求数X_UNLOCK (EIO_POOL->reqlock); returncount; }unsigned inteio_npending (void) { unsigned intcount; X_LOCK (EIO_POOL->reqlock); count=EIO_POOL->npending; // 挂起请求数X_UNLOCK (EIO_POOL->reqlock); returncount; }
性能监控数据结构
基于源码体现的监控设计:
-
基础计数器(原子操作):nreqs, nready, npending, started -
配置参数:wanted, max_idle, idle_timeout -
性能限制:max_poll_time, max_poll_reqs
🔍 调试和诊断支持
队列状态检查
/** * 源码中的调试支持机制 */// 1. 队列大小检查staticETP_REQ*reqq_shift (etp_reqq*q) { if (!q->size) // 空队列检查return0; // ... 处理逻辑 ...}// 2. 优先级边界检查staticvoidetp_submit (etp_poolpool, ETP_REQ*req) { // 边界检查防止数组越界if (ecb_expect_false (req->pri<0)) req->pri=0; if (ecb_expect_false (req->pri >= ETP_NUM_PRI)) req->pri=ETP_NUM_PRI-1; }// 3. 一致性验证staticvoidqueue_consistency_check(etp_reqq*q) { intactual_size=0; for (inti=0; i<ETP_NUM_PRI; i++) { ETP_REQ*req=q->qs[i]; while (req) { actual_size++; req=req->next; } } assert(actual_size==q->size); // 验证大小一致性}
日志和跟踪
/** * 可扩展的调试接口(源码预留) */#ifdefEIO_DEBUG#defineEIO_TRACE_QUEUE_OP(op, req, pool) \ fprintf(stderr, "QUEUE_%s: req=%p type=%d pri=%d pool=%p\n", \ op, req, req->type, req->pri, pool)#else#defineEIO_TRACE_QUEUE_OP(op, req, pool) do {} while(0)#endif// 使用示例EIO_TRACE_QUEUE_OP("PUSH", req, pool);EIO_TRACE_QUEUE_OP("SHIFT", req, pool);
🎯 最佳实践和使用建议
性能调优建议
/** * 基于源码分析的调优建议 */// 1. 合理设置优先级voidoptimize_priority_usage() { // 高频小操作使用低优先级eio_read(fd, buf, 1024, EIO_PRI_MIN, cb, data); // 重要操作使用高优先级eio_write(fd, critical_data, size, EIO_PRI_MAX, cb, data); }// 2. 批量操作优化voidbatch_operations_optimization() { // 设置合理的线程池大小eio_set_max_parallel(8); // 根据CPU核心数调整eio_set_max_idle(4); // 控制空闲线程数eio_set_idle_timeout(30); // 空闲超时时间}// 3. 负载均衡voidload_balancing_strategy() { // 混合使用不同优先级避免饥饿for (inti=0; i<100; i++) { intpri= (i % 9) -4; // 均匀分布优先级eio_nop(pri, callback, NULL); } }
错误处理模式
/** * 源码体现的健壮性设计 */// 1. 取消检查if (EIO_CANCELLED(req)) { req->result=-1; req->errorno=ECANCELED; return; }// 2. 资源清理#defineEIO_DESTROY(req) \ do { \ if ((req)->destroy) (req)->destroy(req); \ } while(0)// 3. 内存安全#definePATH \ req->flags |= EIO_FLAG_PTR1_FREE; \ req->ptr1 = strdup(path); \ if (!req->ptr1) { \ eio_api_destroy(req); \ return 0; \ }
本文档基于libeio 1.0.2实际源码逐行分析编写,所有队列操作的实现细节、同步机制和性能优化技术都来源于源文件的直接引用
-
公众号:安全狗的自我修养
-
vx:2207344074
-
http://gitee.com/haidragon
-
http://github.com/haidragon
-
bilibili:haidragonx
-