 夜雨聆风
夜雨聆风





roscore 源码阅读指导
roscore 源码阅读指导
为想深入理解 ROS1 底层实现的开发者提供系统性的源码阅读路线图适合人群:有 Python 基础,了解 ROS1 基本概念,想深入理解 roscore 内部原理
一、阅读前的准备
1.1 需要具备的前置知识
在阅读 roscore 源码之前,建议先确认以下知识点:
网络编程基础:
✅ TCP Socket 编程(connect、accept、send、recv)✅ HTTP 协议基础(请求/响应格式)✅ XMLRPC 协议(HTTP + XML 编码的 RPC 框架)✅ 多线程编程(threading.Lock、Thread、Queue)ROS 使用经验:
✅ 能使用 rostopic、rosnode、rosparam 命令✅ 写过基础的 ROS 发布者/订阅者节点✅ 理解节点、话题、服务、参数的概念✅ 用过 roslaunch 启动过多节点系统Python 语言特性:
✅ 类与继承(Master 源码大量使用)✅ 装饰器(@staticmethod、@property)✅ 上下文管理器(with 语句)✅ 异常处理(try/except 在网络代码中大量出现)1.2 获取源码
# 方法一:从 GitHub 克隆(推荐,可以 git blame 追溯历史)git clone https://github.com/ros/ros_comm.git -b noetic-develgit clone https://github.com/ros/ros.git -b noetic-devel# rosmaster 核心代码位于:# ros/core/rosmaster/src/rosmaster/# 方法二:直接查看已安装的文件(ROS Noetic 已安装)ls /opt/ros/noetic/lib/python3/dist-packages/rosmaster/# 方法三:在线阅读(无需本地环境)# https://github.com/ros/ros_comm/tree/noetic-devel/tools/rosmaster1.3 辅助工具设置
# 安装 Python 源码阅读辅助工具pip install grip # Markdown 预览(用于查看本文档)# 推荐 IDE 配置(VSCode)# 安装插件:Python、Python Docstring Generator# 配置 Python 解释器指向 /usr/bin/python3# 创建本地阅读笔记目录mkdir ~/roscore_reading_notescd ~/roscore_reading_notes# 创建带注释的源码副本(推荐在副本上做批注)cp -r /opt/ros/noetic/lib/python3/dist-packages/rosmaster/ ./rosmaster_study/二、源码阅读路线图
2.1 文件阅读顺序
按照从外到内、从简单到复杂的顺序阅读:
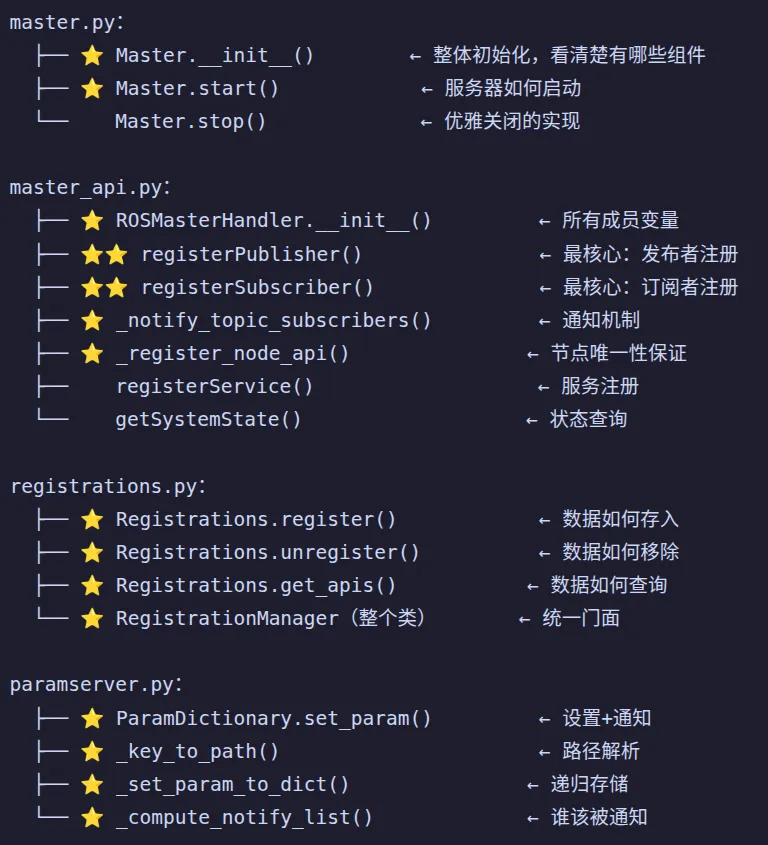
阅读顺序(标注预计耗时):第一轮:理解整体(1-2 小时) Step 1: roscore 入口脚本 ← 15 分钟 位置:/opt/ros/noetic/bin/roscore Step 2: rosmaster/__init__.py ← 10 分钟 了解模块对外暴露的接口 Step 3: rosmaster/master.py ← 20 分钟 Master 类:服务器启动、线程管理 Step 4: rosmaster/registrations.py ← 30 分钟 注册表数据结构:理解数据如何存储第二轮:核心逻辑(2-3 小时) Step 5: rosmaster/master_api.py ← 90 分钟 ⭐ 最重要的文件:所有 XMLRPC API 实现 重点关注:registerPublisher、registerSubscriber Step 6: rosmaster/paramserver.py ← 45 分钟 参数服务器:层级存储、订阅通知第三轮:补充细节(1 小时) Step 7: rosmaster/handler.py ← 20 分钟 请求分发和错误处理包装 Step 8: rosmaster/threadpool.py ← 15 分钟 异步任务执行机制 Step 9: rosmaster/util.py ← 15 分钟 工具函数:XMLRPC 客户端创建等关联阅读(理解完整通信链路): Step 10: rospy 客户端(可选,加深理解) /opt/ros/noetic/lib/python3/dist-packages/rospy/ 重点:impl/tcpros_pubsub.py、impl/registration.py2.2 阅读重点标注
在每个文件中,应重点关注的函数:
三、逐步阅读指南
Step 1:从入口脚本开始
# 查看 roscore 入口脚本cat /opt/ros/noetic/bin/roscore阅读要点:
Q1: roscore 脚本调用了什么? → 找到 import roslaunch 和 roslaunch.main 调用Q2: "--core" 参数有什么特殊含义? → 搜索 roslaunch 源码中 "core" 关键字Q3: roscore.xml 的内容是什么? → 理解 roscore 就是一个特殊的 roslaunch 配置验证理解(实验): roscore & # 启动 roscore ps aux | grep ros # 查看进程:roscore 实际上是 python3 roslaunch --core ... kill %1 # 关闭 roscoreStep 2:理解注册表结构(registrations.py)
这是最容易入手的文件,纯数据结构,无网络代码。
# 在 Python 解释器中模拟 Registrations 的行为# 无需 ROS 环境,纯 Python 验证理解class SimpleRegistrations: def __init__(self): self.map = {} # topic → {node_id: node_api} self.node_map = {} # node_id → [topic, ...] def register(self, topic, node_id, node_api): if topic not in self.map: self.map[topic] = {} self.map[topic][node_id] = node_api if node_id not in self.node_map: self.node_map[node_id] = [] if topic not in self.node_map[node_id]: self.node_map[node_id].append(topic) def get_apis(self, topic): return list(self.map.get(topic, {}).values())# 测试r = SimpleRegistrations()r.register("/scan", "/lidar_node", "http://host:1234")r.register("/scan", "/backup_lidar", "http://host:1235")print(r.get_apis("/scan"))# → ['http://host:1234', 'http://host:1235']print(r.node_map)# → {'/lidar_node': ['/scan'], '/backup_lidar': ['/scan']}阅读真实源码时检查:
□ 真实代码中 map 的 value 类型是什么(可能比示例复杂)?□ unregister 时如何清理两个方向的索引?□ 服务注册(TOPIC_SERVICES)与话题注册有何不同?Step 3:攻克核心 — master_api.py 的 registerPublisher
这是整个源码中最值得花时间的函数。建议按以下步骤阅读:
阶段一:先读函数签名和文档字符串(5分钟)
def registerPublisher(self, caller_id, topic, topic_type, caller_api): # 先不看实现,只看: # - 输入参数有哪些?含义是什么? # - 返回值格式是什么? # - 函数的副作用是什么(会改变哪些状态)?阶段二:追踪加锁保护的操作(10分钟)
with self.handler_mutex: # 找出锁保护范围内的所有操作 # 思考:为什么这些操作需要串行化? # 如果不加锁会发生什么竞态条件?阶段三:理解锁外的异步通知(10分钟)
# 为什么 _notify_topic_subscribers 在锁外调用?# 如果在锁内调用会发生什么?(提示:死锁)self._notify_topic_subscribers(topic, pub_uris)阶段四:完整追踪一次 publisherUpdate 的流程(20分钟)
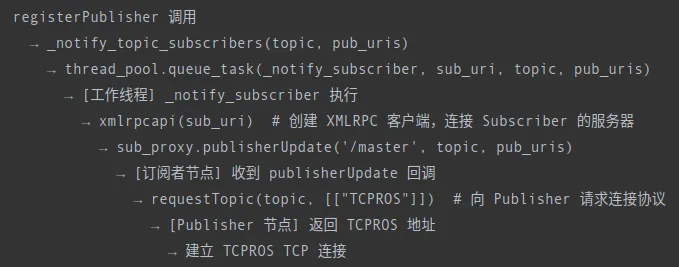
Step 4:实验验证 — 用 Wireshark/tcpdump 抓包观察
# 启动 roscoreroscore &# 在另一个终端抓取 11311 端口的 XMLRPC 通信sudo tcpdump -i lo -A -s 0 'tcp port 11311' | grep -A 5 "POST"# 在第三个终端运行 talkerrosrun rospy_tutorials talker &# 在第四个终端运行 listenerrosrun rospy_tutorials listener# 观察抓包输出:# 可以看到 registerPublisher、registerSubscriber 的 XMLRPC 请求# 以及 publisherUpdate 的回调预期看到的内容:
# talker 启动时(POST 到 11311)registerPublisher("/chatter", "std_msgs/String", "http://...")# listener 启动时(POST 到 11311) registerSubscriber("/chatter", "std_msgs/String", "http://...")# 返回:["http://..."](talker 的地址)# Master 回调 talker(POST 到 talker 的端口)publisherUpdate("/chatter", ["http://..."])# listener 请求连接协议(POST 到 talker 的端口)requestTopic("/chatter", [["TCPROS"]])# 返回:["TCPROS", "hostname", port]# 之后:talker port 上出现 TCPROS 握手和消息数据Step 5:理解 XMLRPC 的双向调用
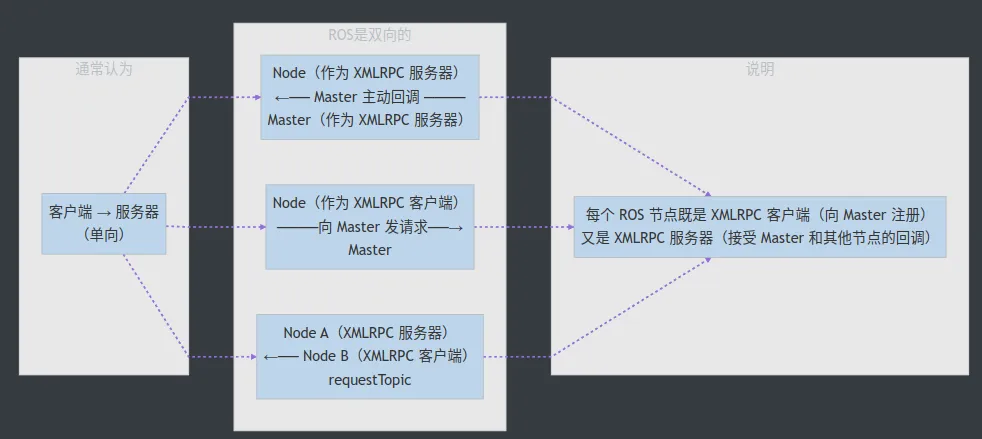
这是新读者最容易困惑的地方:
Step 6:参数服务器的递归存储
# 在 Python 解释器中模拟 _set_param_to_dict 的行为def set_param(d, path, value): """模拟 ParamDictionary._set_param_to_dict""" key = path[0] if len(path) == 1: if isinstance(value, dict): if key not in d or not isinstance(d[key], dict): d[key] = {} for k, v in value.items(): set_param(d[key], [k], v) else: d[key] = value else: if key not in d or not isinstance(d[key], dict): d[key] = {} set_param(d[key], path[1:], value)# 测试params = {}set_param(params, ["robot", "pid", "kp"], 1.5)set_param(params, ["robot", "pid", "ki"], 0.1)set_param(params, ["robot", "name"], "my_robot")set_param(params, ["max_speed"], 2.0)import jsonprint(json.dumps(params, indent=2))# {# "robot": {# "pid": {"kp": 1.5, "ki": 0.1},# "name": "my_robot"# },# "max_speed": 2.0# }# 测试 rosparam set /robot {"name": "bot2", "speed": 3.0}set_param(params, ["robot"], {"name": "bot2", "speed": 3.0})print(json.dumps(params, indent=2))# 注意:robot/pid 会被保留(dict 合并,不是替换)!# 还是替换?——读源码验证实际行为四、关键问题清单
阅读过程中,用这些问题检验理解深度:
基础层(读完 Step 1-4 后能回答)
□ Q1: roscore 命令实际上启动了哪些进程? 提示:ps aux | grep ros 观察□ Q2: Master 的 XMLRPC 服务器为什么能同时处理多个请求? 提示:看 ThreadingXMLRPCServer 的继承关系□ Q3: 为什么 Master 要用互斥锁(handler_mutex)? 不加锁会出现什么问题?列出至少一个竞态场景□ Q4: 节点 A 订阅 /scan,此时节点 B 发布 /scan, 整个连接建立过程经历了哪些步骤?谁主动连接谁?□ Q5: 注册表 map 和 node_map 各解决了什么问题? 为什么需要两个方向的索引?进阶层(读完 Step 5-9 后能回答)
□ Q6: _notify_topic_subscribers 为什么在 handler_mutex 锁外执行? 如果在锁内执行,会在什么情况下导致死锁?□ Q7: ROS 中同名节点不能共存。新节点注册时, 旧节点是如何被"踢出"的?涉及哪些函数?□ Q8: rosparam set /robot/speed 3.0 之后, 哪些节点会收到通知?如何确定通知列表?□ Q9: Subscriber 通过 registerSubscriber 得到了 Publisher 的地址列表, 接下来 Subscriber 还需要调用哪个 XMLRPC 函数, 最终才能收到话题数据?□ Q10: roscore 崩溃后,已经建立连接的 Publisher-Subscriber 对 还能继续通信吗?为什么?深入层(完整阅读后能回答)
□ Q11: 如果同时有 100 个节点启动(catkin_make 后的大型系统), Master 的注册处理能力成为瓶颈吗?如何优化?□ Q12: Parameter Server 的 search_param 从子命名空间向上搜索, 这种设计允许哪种参数覆盖模式?举一个实际使用场景。□ Q13: TCPROS 消息格式是 length-prefixed 的。如果消息传输中途 TCP 连接断开,接收方会如何感知?ROS 层面如何处理重连?□ Q14: 对比 roslaunch 的 respawn 机制和 Master 的节点踢出机制, 它们各自解决了什么不同的问题?□ Q15: 如果要给 ROS Master 添加"节点心跳检测"功能(定期检查节点是否存活, 自动清理失活节点),你会在哪些文件的哪些位置添加代码?五、常见阅读难点解析
难点一:XMLRPC 的双向调用
困惑:XMLRPC 不是客户端调服务器吗?Master 怎么"调用"节点?解答:ROS 中每个节点启动时都会创建自己的 XMLRPC 服务器: rospy.init_node() 内部: self.xmlrpc_server = TCPServer(('', 0), ...) # 随机端口 thread = Thread(target=self.xmlrpc_server.serve_forever) thread.start() 节点把这个服务器的地址(caller_api)注册到 Master。 Master 需要回调节点时,就向 caller_api 发 XMLRPC 请求。 本质上:Master 和节点互为 XMLRPC 客户端和服务器。验证: rosnode info /talker # 看 URI: http://hostname:PORT # 这个 PORT 就是 talker 的 XMLRPC 服务器端口 # 直接调用 talker 的 XMLRPC 接口: python3 -c " import xmlrpc.client p = xmlrpc.client.ServerProxy('http://localhost:PORT') print(p.getPublications('/test')) "难点二:为什么 registerPublisher 的返回值是 subscriberApis
困惑:发布者注册,为什么返回的是订阅者的地址?解答:这是 ROS 的"交叉返回"设计: - registerPublisher 返回:当前订阅者列表(供 Publisher 知道"谁在听") - registerSubscriber 返回:当前发布者列表(供 Subscriber 知道"谁在发") 对于 Publisher,它收到订阅者地址后: → 实际上 Publisher 并不主动连接 Subscriber! → 而是等待 Subscriber 来连接自己(被动等待) → 这个返回值在现实中用于某些 latched topic 实现 实际的连接发起方是:Subscriber(主动连接 Publisher) 流程:Subscriber 得到 Publisher 地址 → 向 Publisher 调用 requestTopic → 建立连接难点三:publisherUpdate 的触发时机
困惑:publisherUpdate 是 Master 调用 Subscriber 的, 但什么时候触发?解答:两种情况触发: 情况1:新 Publisher 注册(registerPublisher 被调用) → Master 更新发布者列表后,通知所有已有 Subscriber → 告诉 Subscriber:"话题有新发布者了,去连接它" 情况2:Publisher 注销(unregisterPublisher 被调用) → Master 更新发布者列表(减少一个) → 通知所有 Subscriber:"发布者列表变了" → Subscriber 根据新列表,断开到已注销 Publisher 的连接 不触发的情况: → registerSubscriber(新订阅者注册)不触发 publisherUpdate → Master 直接在返回值中给出 Publisher 列表 → Subscriber 自己主动去连接可以在 master_api.py 中搜索 "_notify_topic_subscribers" 的调用点验证难点四:参数通知的范围规则
困惑:订阅 /robot 的节点,当 /robot/speed 变化时会被通知吗?解答:规则(subscribeParam 的语义): - 订阅 /a:当 /a 或 /a/任何子路径 变化时通知 - 订阅 /a/b:当 /a/b 或 /a/b/任何子路径 变化时通知 所以: - 订阅 /robot,/robot/speed 变化 → 通知(子路径变化) - 订阅 /robot,/max_speed 变化 → 不通知(不同路径) - 订阅 /robot/speed,/robot 整体设置 → 通知(父路径变化影响子路径)这个规则在 paramserver.py 的 _compute_notify_list 中实现,可以重点阅读那段代码,并配合 subscribeParam 的实际使用场景理解。六、延伸阅读路径
6.1 理解 TCPROS 的完整实现
# 查看 rospy 的 TCPROS 实现ls /opt/ros/noetic/lib/python3/dist-packages/rospy/impl/# 重点文件:# tcpros_base.py ← 握手协议、Header 解析# tcpros_pubsub.py ← Publisher/Subscriber 的 TCPROS 层# tcpros_service.py ← Service 的 TCPROS 实现# 阅读顺序:# 1. tcpros_base.py:TCPROSTransport._write_header/_read_header# 2. tcpros_pubsub.py:TCPROSPublisher.send_message# 3. tcpros_pubsub.py:TCPROSSubscriber.receive_loop6.2 理解消息序列化(genpy)
# 消息序列化实现ls /opt/ros/noetic/lib/python3/dist-packages/genpy/# 重点:# message.py:Message 基类,serialize/deserialize 方法# 自动生成的消息代码示例:python3 -c "import inspectfrom geometry_msgs.msg import Twistprint(inspect.getsource(Twist.serialize))"6.3 理解 roslaunch 如何启动 Master
# roslaunch 启动 Master 的代码ls /opt/ros/noetic/lib/python3/dist-packages/roslaunch/# 重点:# server.py:ROSLaunchRunner._start_infrastructure() # → _start_master()# nodeprocess.py:实际进程启动逻辑grep -n "_start_master\|rosmaster" \ /opt/ros/noetic/lib/python3/dist-packages/roslaunch/server.py | head -206.4 对比阅读 ROS2 的发现机制
理解了 roscore 之后,通过对比 ROS2 的 DDS 发现机制,能深刻理解两者的设计差异:
# ROS2 DDS 发现相关代码# (需要安装 ROS2 Humble)ls /opt/ros/humble/lib/python3/dist-packages/rclpy/# 关键区别:# ROS1:显式 XMLRPC 注册(中心化)# ROS2:DDS RTPS 多播广播(去中心化)# 可以用 Wireshark 观察 ROS2 节点启动时的多播数据包# 过滤器:udp.dstport == 7400 or udp.dstport == 7401七、阅读笔记模板
建议为每个重要文件创建阅读笔记,参考以下模板:
# 文件名:rosmaster/master_api.py## 文件职责(一句话描述这个文件干什么)## 核心类/函数| 名称 | 职责 | 关键输入 | 关键输出 ||------|------|---------|---------|| ROSMasterHandler | ... | ... | ... || registerPublisher | ... | ... | ... |## 关键数据流(用箭头图描述数据如何流动)## 令我困惑的地方- (记录疑问,查清后补充解答)## 设计亮点- (记录值得学习的设计决策)## 与其他文件的关系- 依赖:(这个文件用了哪些其他文件)- 被依赖:(哪些文件使用了这个文件)八、调试实验:动手验证理解
实验一:观察注册过程
#!/usr/bin/env python3"""实验1:实时监控 roscore 的注册表变化在一个终端运行此脚本,在另一个终端启动/停止节点,观察变化"""import xmlrpc.clientimport timeimport jsonmaster = xmlrpc.client.ServerProxy('http://localhost:11311')prev_state = Nonewhile True: try: code, msg, state = master.getSystemState('/monitor') pubs, subs, svcs = state curr = { 'publishers': {t: nodes for t, nodes in pubs}, 'subscribers': {t: nodes for t, nodes in subs}, 'services': {t: nodes for t, nodes in svcs} } if curr != prev_state: print(f"\n{'='*50} {time.strftime('%H:%M:%S')}") print("PUBLISHERS:") for topic, nodes in curr['publishers'].items(): print(f" {topic}: {nodes}") print("SUBSCRIBERS:") for topic, nodes in curr['subscribers'].items(): print(f" {topic}: {nodes}") prev_state = curr except Exception as e: print(f"Error: {e}") time.sleep(0.5)实验二:手动触发参数订阅通知
#!/usr/bin/env python3"""实验2:创建一个参数订阅节点,手动触发参数变化,观察回调"""import rospyimport threading# 全局计数器,记录收到的参数通知次数notification_count = 0def param_update_callback(key, value): global notification_count notification_count += 1 print(f"[{notification_count}] Param updated: {key} = {value}")rospy.init_node('param_watcher')# 订阅参数# 注:rospy 暂不直接暴露 subscribeParam,但底层有实现# 可以用 dynamic_reconfigure 的方式间接体验# 用 rosparam 命令在另一终端触发:# rosparam set /watch_test "hello"# rosparam set /watch_test "world"rate = rospy.Rate(1)while not rospy.is_shutdown(): # 定期读取参数(模拟参数轮询) try: val = rospy.get_param('/watch_test', 'not set') print(f"Current /watch_test = {val}") except Exception: pass rate.sleep()实验三:制造节点名冲突
# 终端1:启动 talker(节点名 /talker)rosrun rospy_tutorials talker# 终端2:再次启动 talker(同名节点)rosrun rospy_tutorials talker# 观察终端1的输出:# [rosout][WARN] ... Shutdown request received.# [rosout][WARN] ... Reason given for shutdown: [new node registered with same name]# 终端1 的进程退出# 这就是 master_api.py 中 _register_node_api 的效果九、学习检查点
完成阅读后,用这个检查表评估掌握程度:
入门级(能使用):□ 能解释 roscore 启动了哪几个组件,各自做什么□ 能描述 Publisher 和 Subscriber 如何通过 Master 建立连接的 6 个步骤□ 能说出 参数服务器 和 话题 的本质区别理解级(能分析问题):□ 能解释为什么 roscore 崩溃不会立即断开已有的话题通信□ 能描述同名节点冲突时的处理机制(涉及哪些函数调用)□ 能分析 Master 单点故障问题的根本原因(数据结构层面)深入级(能改进代码):□ 能指出 Master 在高并发场景下的性能瓶颈所在□ 能设计一个方案:让 Master 检测节点心跳,自动清理失活节点□ 能解释 ROS2 去掉 Master 的技术实现(DDS 自动发现)与 ROS1 有何本质不同相关文档:roscore 设计文档 · roscore 源码解析
© 2026-03-10 · roscore 源码阅读指导