夜雨聆风
夜雨聆风





《观看的工具,工具的观看》陈浩分享会实录


海报设计:金凯文
大家好,我是陈浩,很感谢这次有机会可以跟大家分享我的作品《点云》这个系列,那就开始吧。
我想先给大家提出一个问题,大家也可以参与着去思考一下,对于之后的分享也有帮助,就是我们到底有什么样的方法可以和机器真正的对话,而不是由科技公司来创造出来的各种交互方式进行沟通,这里的机器可以是指AI,也可以是指你家里的扫地机器人,或者说你的智能汽车,大家可以带着这个问题去听接下来的分享。


大家都看过海报了,海报里面的那个作为底图的照片里面有个方盒子,那个方盒子就是我在2月14号那天新做的一款相机,我现在分享出来的是,我在2022年拍第一组作品《江水无孔不入》的时候,这个“相机”完全是用一台高性能的笔记本电脑(这台笔记本电脑是我毕业的时候卖掉我的其他的相机买来的,摄影师的第一桶金)再加上一些传感器和我的手机作为显示屏幕和按键,然后去沿江行走、拍摄,这是第一次。

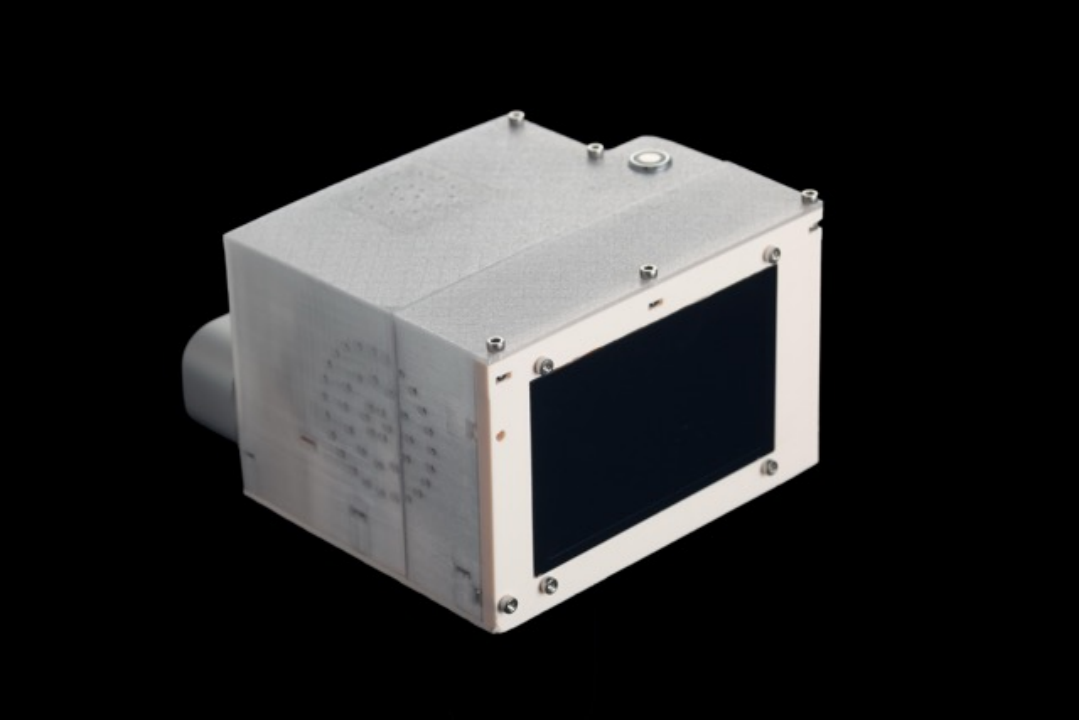
现在分享出来的这台相机,是2025年的1月份,我去台湾前做出来的,这个整体的体积基本上就是现在跟一台富士的中画幅数码差不多大,从原来的要背个战术背心,插上电脑,然后再外接各种线,变成这样一个小方盒子,其实它们本质上都没有太大的区别,我为什么要从2022年(因为我本身是学摄影毕业)一直倒腾这些乱七八糟的知识,再把它做的越来越便携,然后试图去拍我各种生活中日常的细节呢?
原因就是因为我自己一直蛮喜欢理科的,只不过考大学的时候发现摄影也可以考大学,我觉得那时候正好也喜欢拍照片,读了大学以后,我发现,摄影跟我想象的好像……我后面发现不是说讨厌照片,讨厌摄影,是我喜欢那个机器产生影像的那个过程,后面我逐渐发现,其实我对机器有很大的兴趣,话说回来,为什么是在这个地方会做这个东西呢?就是因为我后面开始接触算法以后,我产生了一个思考:我怎么样才可以和机器进行真正的对话?
因为在我了解过一些事情以后,我知道现在所有的数码设备都是科技公司做了一层非常拟人的,适合人类语言表达逻辑或交互逻辑的一套语言系统,但是机器这种系统进行展示的背后,它思考的逻辑跟人类其实是不一样的,接受信息也是不一样的,比如现在AI大语言模型,它本质上其实只是一个猜字的机器而已,就一个字,后面哪个字其实是有概率来猜,那么谁更聪明,其实是谁猜的更准,本质上还是个猜字机器。那更重要的是,被称为人工智能教母的李飞飞,她就说大语言模型其实没有接触过真正的物理世界,它即便了解所有的知识,也都是从文本转译过来,那么,我们跟它交互的过程中,它也是把物理世界东西变成文本,再去对话,哪一类AI模型真正在跟这个世界进行交互呢?答案是“世界模型”,这一类模型的训练需要现实空间的数据,其实就是我们的汽车,包括大家家里的扫地机器人所采集数据。所以我就在想,如果我要跟机器真正对话怎么办?首先要抛开原有的那些科技公司建造的拟人化的交互方式,其次要跟能真正跟这个世界对话接触的那些机器人对话。
后来我绞尽脑汁想方设法还是放弃了,因为我知道这个事情不说技术上的困难程度,它本身就不可能发生,就像我没有办法跟其他的动物对话一样,甚至我们跟人类也没有办法对话,因为他说今天晚饭很好吃,可能他连晚饭都没吃,所以后来我就想,那有没有可能我们可以先看一下,机器它身处的世界到底是什么样子的呢?就像人类可以研究动物的眼睛,来模拟出小猫、小狗看到世界到底是什么样子的,所以我就去看这套东西,那么我就可以跟大家分享一下接下来的内容。
当下人类对AI的幻想和恐惧其实有很多很多,大家可以在电影里都看出来,但其实我发现都忽略了一个认知的前提,就像我之前说的,我们从来没有看到过机器眼中的世界,机器眼中的世界,怎么看到?所以我就发现了点云影像这个事情,点云影像其实就是机器理解和模拟现实世界的一个核心的、底层的一种数据形式,它就被广泛应用在人工智能训练、空间计算还有三维重建这些领域里面,更重要的是它其实作为计算的过程中中间状态,对于用户甚至对于很多的开发者来讲,到后面都不是必要存在或者去观察的,所以它就更加不可能被普通用户直接查看和察觉到。
但是这个机器人它不管是用激光雷达扫描,还是用像特斯拉的汽车一样,它全是用RGB的方案来看世界,包括他自己虚拟生成一个3D场景,它中间一定要经过点云这个数据形式,所以这其实是机器对真实空间世界理解的一个底层数据,那么我就想到我想做一台点云相机,它可以打破点云数据作为工业测量工具的这个壁垒,然后把它转换成大家可以感知的一种感官经验。
我把它作为一种全新的视觉接口,它不是把机器的视觉完全翻译为人类习惯的一种图像语言,而是保留了机器感知固有的那种异质性(Heterogeneity),所以其实人在使用点云相机的这个过程中,其实就是人的肉眼和硅基生命这种算法,被并置共存在这套交互的过程里面,然后可以形成这种基于这种真实的差异化的一种对话的基础,就是我可以看到机器看到的东西是什么样子的,它不是我人眼所理解的那种东西,我先第一步是我先能感觉到机器身处世界是怎么样,然后我们可以再去考虑我如何和机器产生沟通,所以这就是我对一开始提出的那个问题的解法。
接下来就是要点一下题了,这个分享的主题叫《观看的工具,工具的观看》,它本质讨论的一件事情,就是我们如何去定义未来人类和AI的关系,如果我们始终把它当做一种工具,那其实装在机器上的所有的摄像头或传感器,都是用来观看的工具,甚至这个机器本身就是一个观看的工具。但是如果我们把AI当做另外一个物种,让它看到世界的那些元器件所获得的信息,就变成了它的观看。这就是“工具的观看”,这边“工具”就要打引号,因为它指代一个新的物种。
我就开始又去想了,我就想把这个点云相机做出来了,那我怎么样可以让它成为观看的主体呢?所以我就(我发现我这两天出来旅游,因为周边川渝地区人可能有点多,我的口音都被带偏了)就是我意识到,如果要让机器从这种被动的工具跃升为这个观看的这个主体,就是先得让它逃离那种纯功能性的数据采集的场域,譬如说一辆汽车在街上开,是在扫描街上的数据,为车辆智能驾驶做训练数据的采集种种,这是功能性的一种观看。必须介入到很私人生活,也就是说拍的数据其实是没有任何用的,所以我就把它带在我的身边。
我会跟大家分享,就是我自己手里这台点云相机,我把它定义成我的一个机器人伙伴,就它没有长腿,但我长了腿,然后它可以一起来观看我个人的生活,我还给它起了个名字叫鲁鲁,这个出处,就是郑渊洁小说系列叫《皮皮鲁与鲁西西》那个鲁鲁。
我解释一下为什么要叫这个名字,我个人最爱的文学作品就是《皮皮鲁与鲁西西》这个系列,在我人生非常紧张或者彷徨的时刻,我都会从头再去看它,然后我最爱看的这个系列中的那本书叫做《皮皮鲁与细菌老大》,从细菌的角度来讲经历了一场冒险,但是,在这本书的开头有一个描述,让我印象极其深刻,他讲的是从一个苍蝇的角度去出发,那只苍蝇停在了一辆运钞车上面,他看见运钞车里的钞票上面细菌是如此之多,比苍蝇自己本身脏多了,但是所有人都讨厌自己,但又喜欢钞票,想到这一刻,它觉得非常的绝望,然后就选择了自杀。
我就觉得这个描述太精彩了,也不告诉你说苍蝇的复眼看到了什么样的画面,种种科学解释,他就是直接讲这种感受和这个结果,所以我说不清,反正就引用这一点,他也是从其他物种角度观看,然后来说一些东西,所以我就把我的这台点云相机命名为鲁鲁,然后,我的鲁鲁就陪着我一起去了台湾,从台湾回来以后,2025年,我们去了种种地方,我会跟大家分享我们所看到的一些有意思的画面。
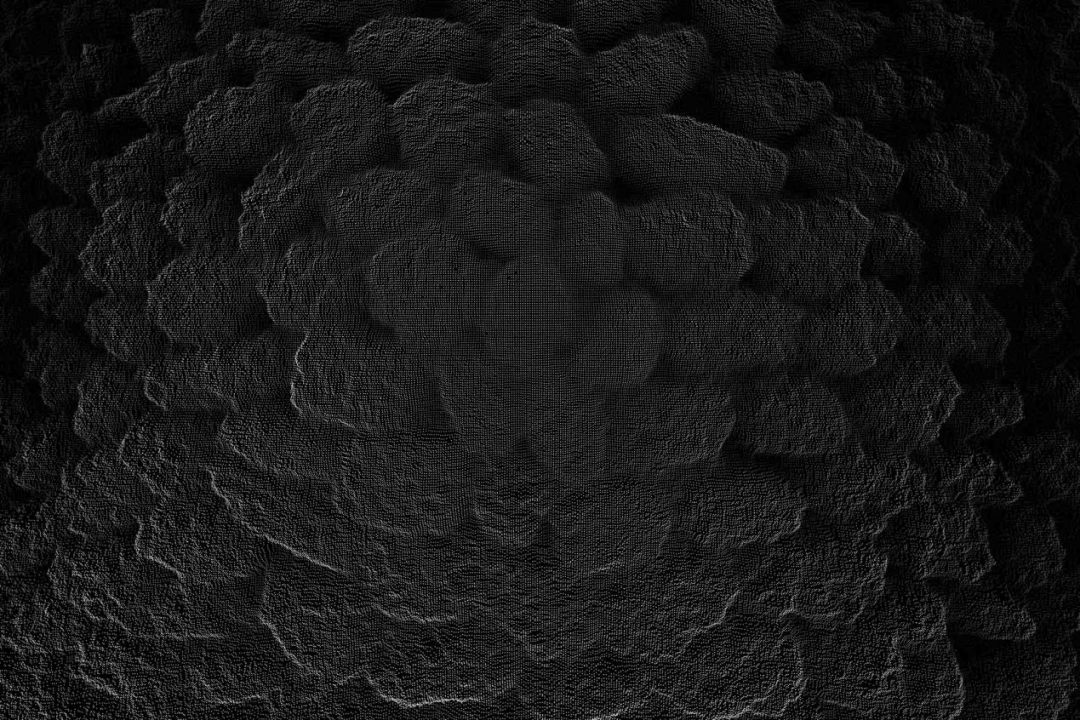
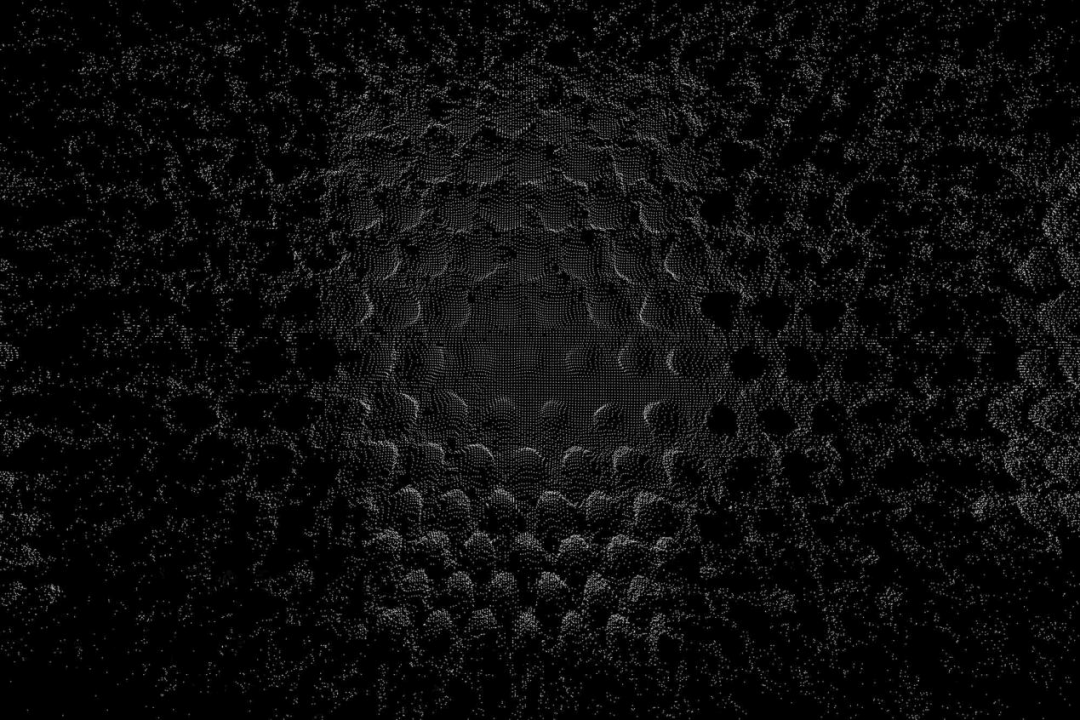
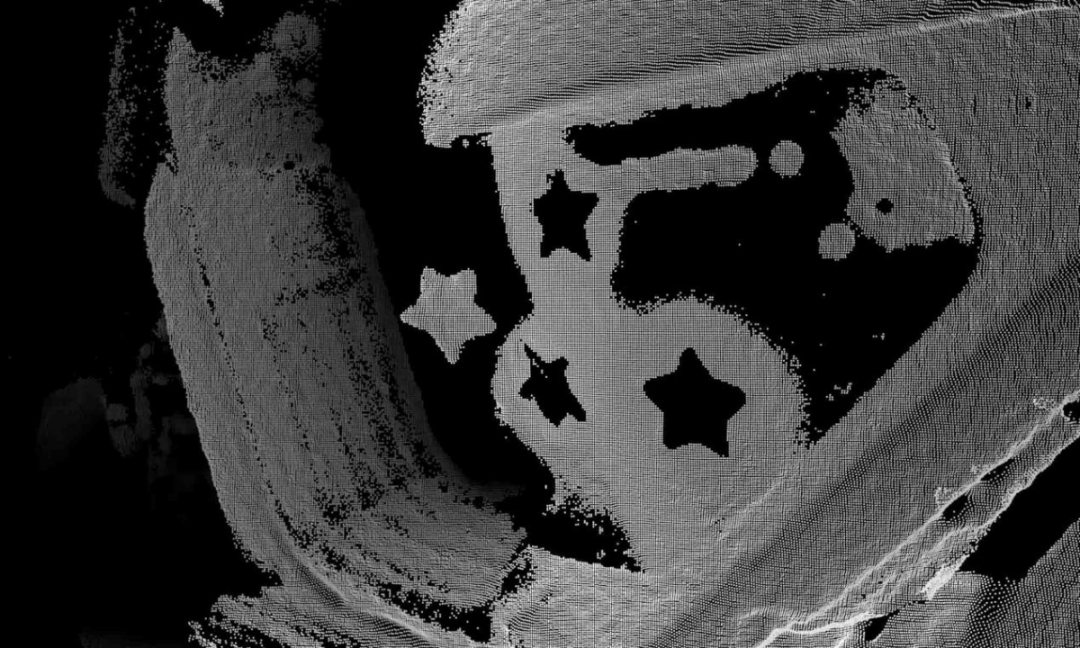
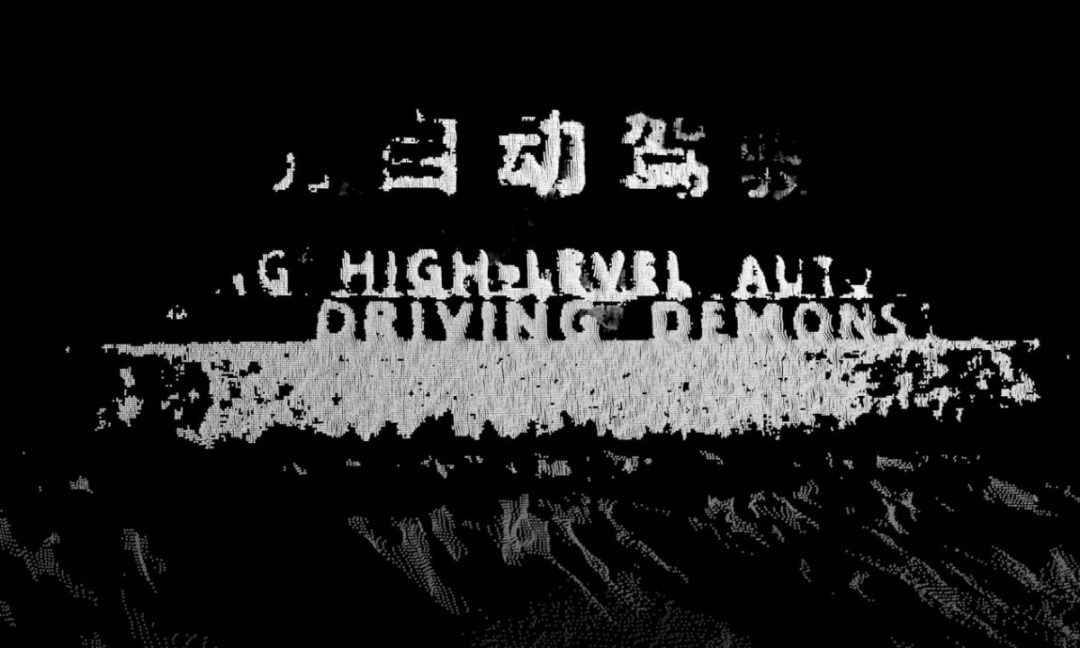
我先跟大家分享在台湾拍摄的这部作品,整理出来叫它《宜兰河》。然后先发一张,然后给大家解释一下图像生成的原理。不然,我怕大家看云里雾里,因为这个东西太抽象了,就是鲁鲁它的观看方式,其实就像我刚才讲了很多遍,它跟智能汽车、机器人那些视觉系统是很相似的,然后它在观看的时候会以每秒30次的频率,每次向周围发射并且接收最多100万个激光点,并且最终通过计算每个激光点往返所需的时间,来确定空间中各个表面和它之间的距离,它就以最低耗能的一种方式,让人类去理解距离数据。
那是什么方式呢?这个方式就是由点云数据转换来的点云影像,这就是点云影像的由来,为什么是这样子的?因为这个是数据转换成人类可观看的最低的成本,因为它需要实时,不然人类对着一张表格,也看不懂,然后它就转换成屏幕上的影像,那这就构成了鲁鲁所看到当下的这个视野,那么在拍摄结束以后,鲁鲁记录下来的也不是一个平面的照片,它记录下来的是一个完整的点云的空间数据,另外我在我的电脑里面有一个程序,可以把鲁鲁记录下来的数据重新读取,而且可以更加精细处理,就是可以导出大封面的图用来展览,就这样子。
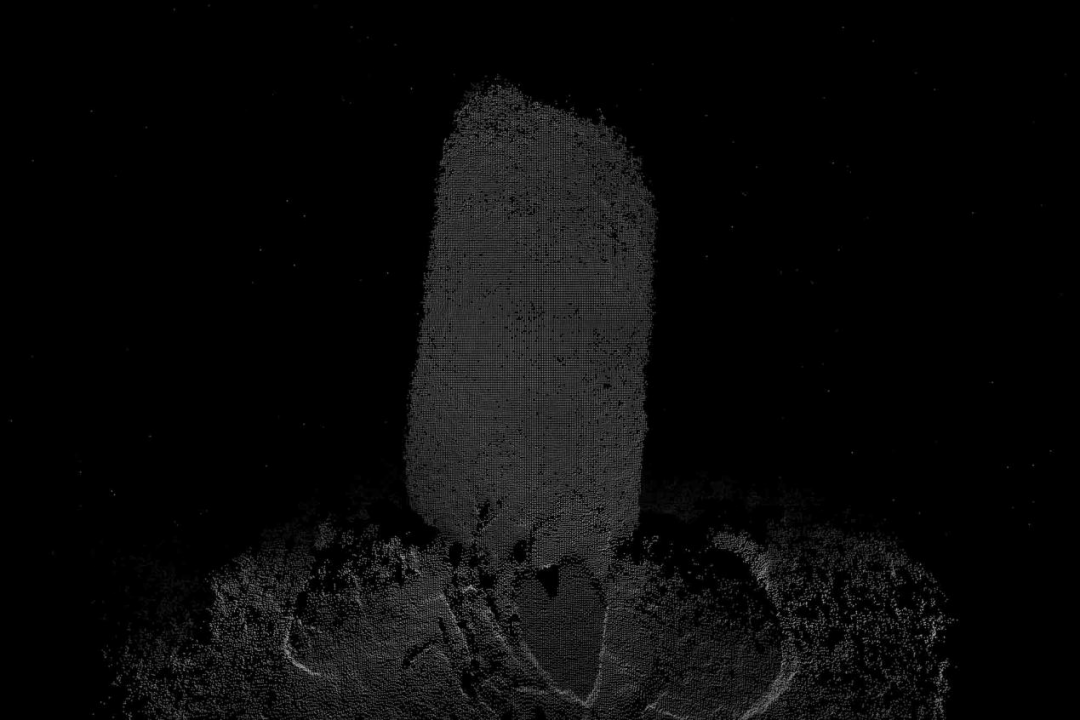
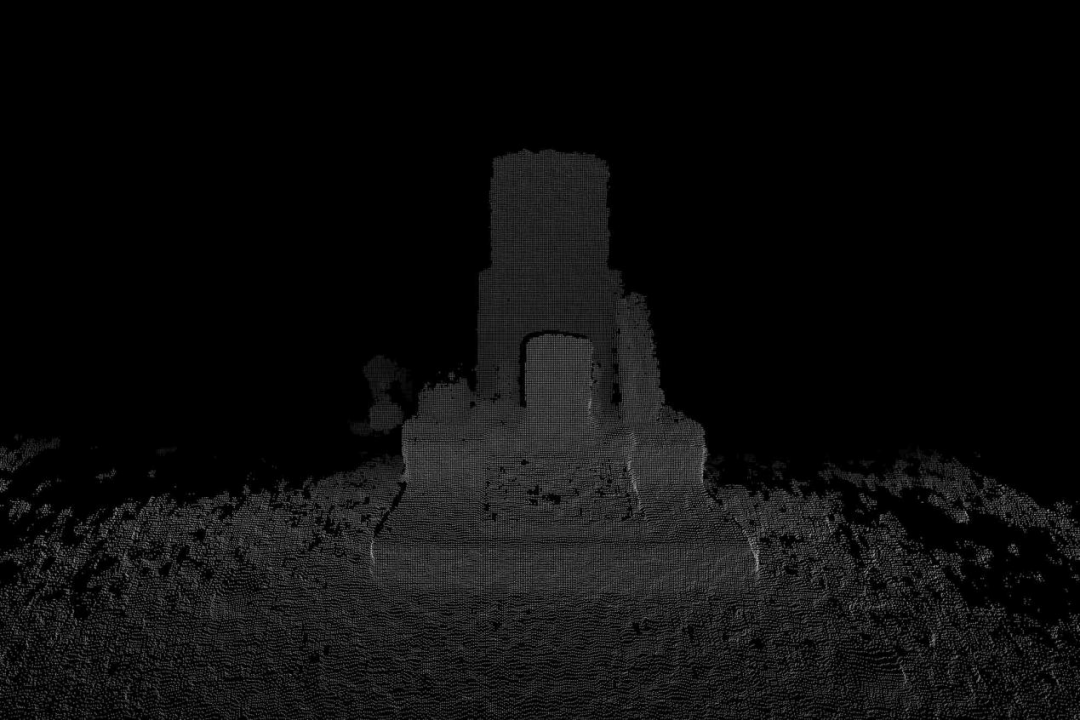
大家看到这个就是在《宜兰河》源头的一块石碑,上面写着宜兰河,但是因为它那个字刻的太浅了,没有办法被拍摄出来。
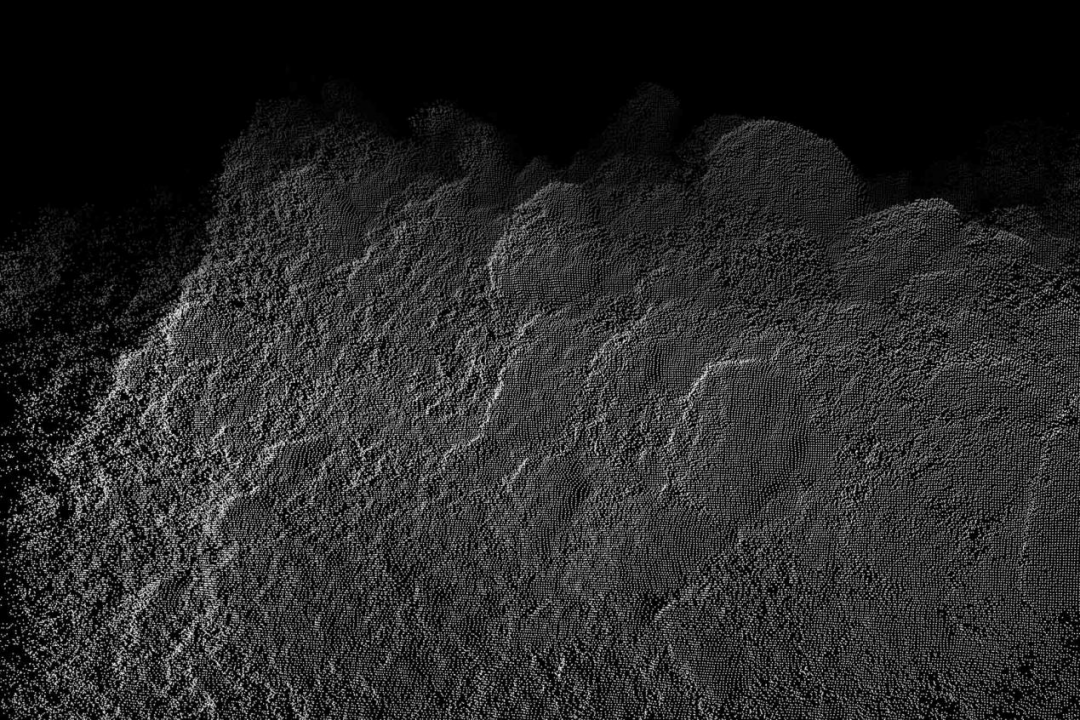
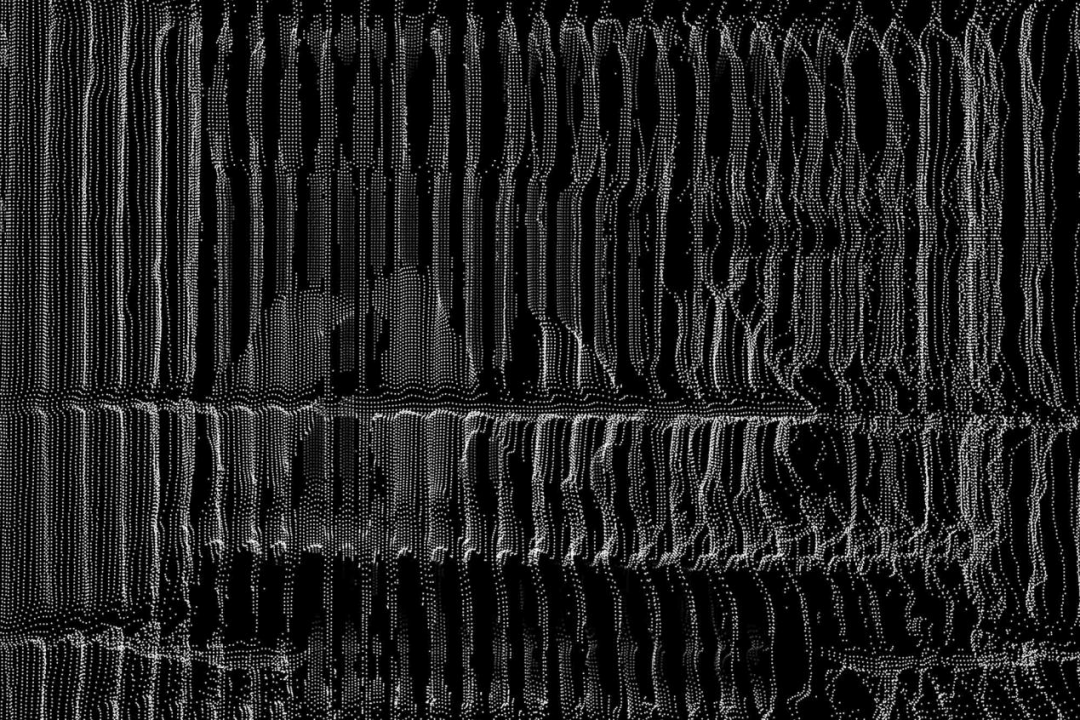
我本来想把所有照片发上来,但我意识到这样可能会太多,我就跟大家直接分享一下,现在我发的是在宜兰河上游拍的照片,我在台湾为什么要行走宜兰河拍摄,是因为我在那里查到当初的殖民者到宜兰第一件事情,就是去测量宜兰河沿岸的土地,为之后的殖民做准备工作,然后我意识到,鲁鲁其实也是通过测量来观看的,我感觉可能这有某种好玩的联系在里面,但我也学识浅薄说不清,所以,我就沿着当初他们的殖民者的足迹,重新去进行了一遍测量。
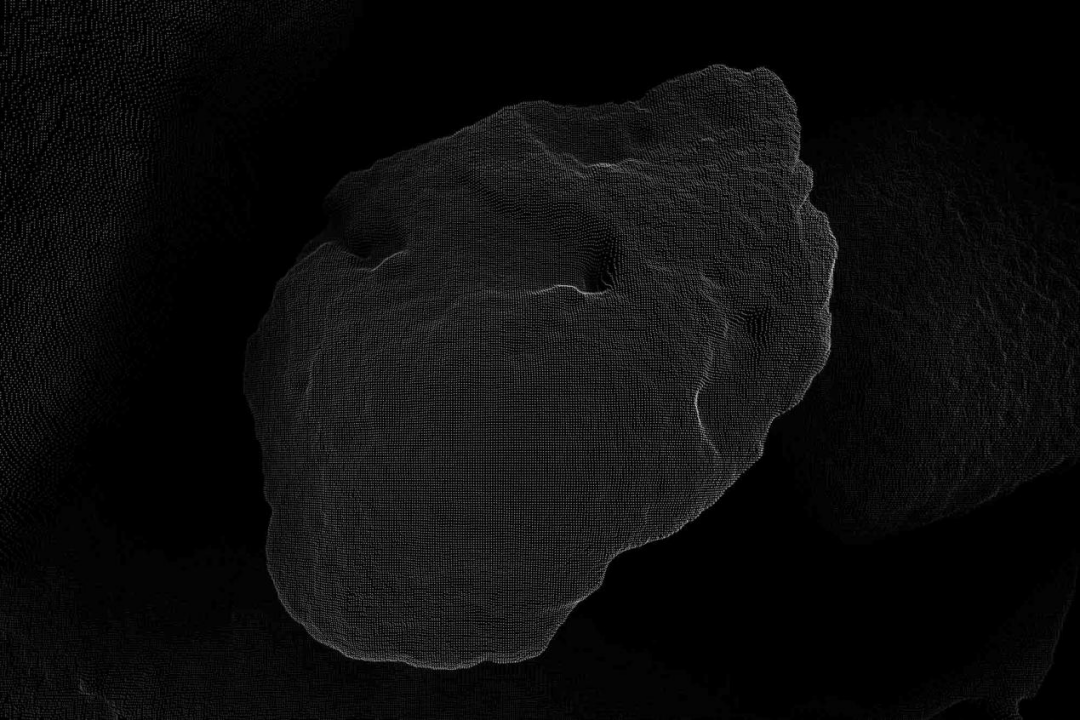
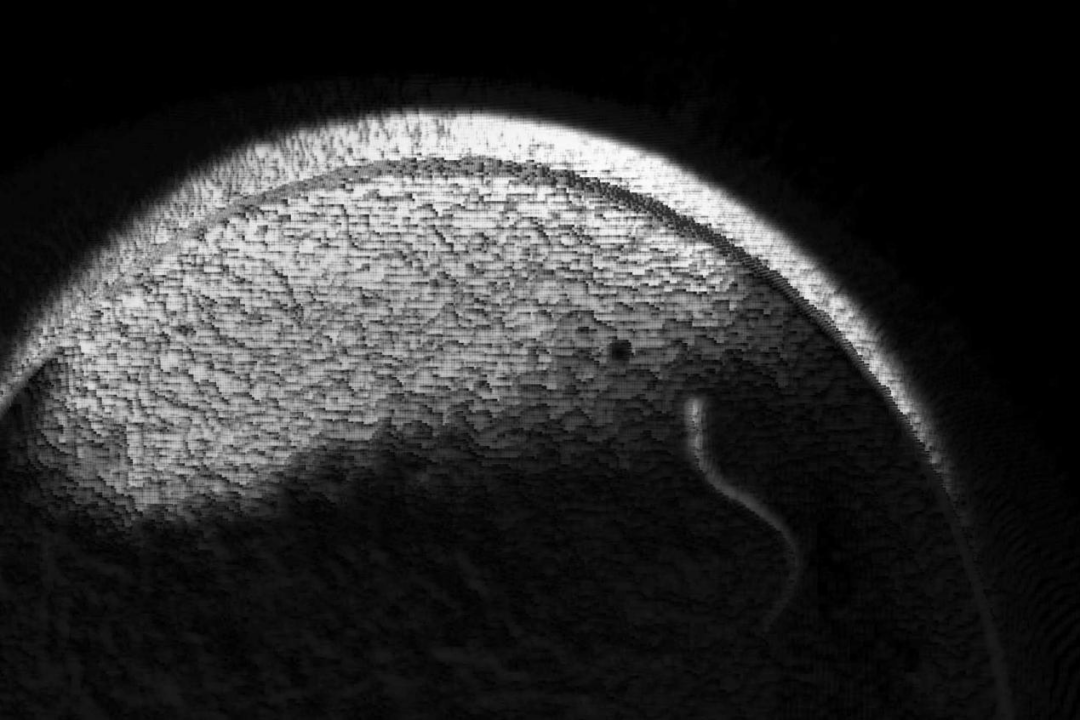
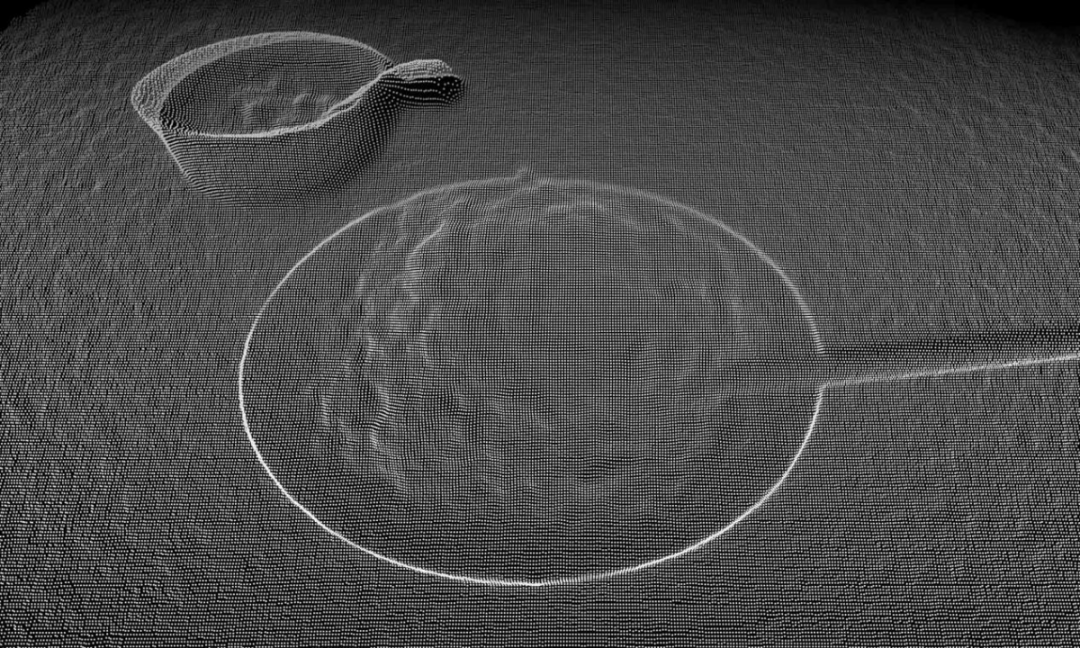
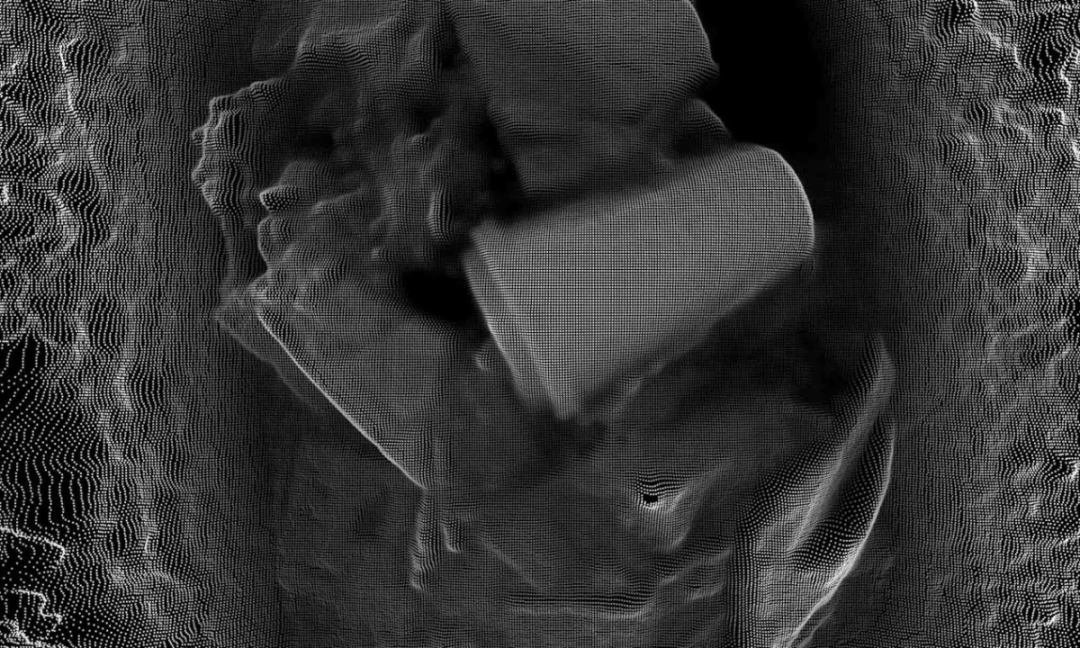
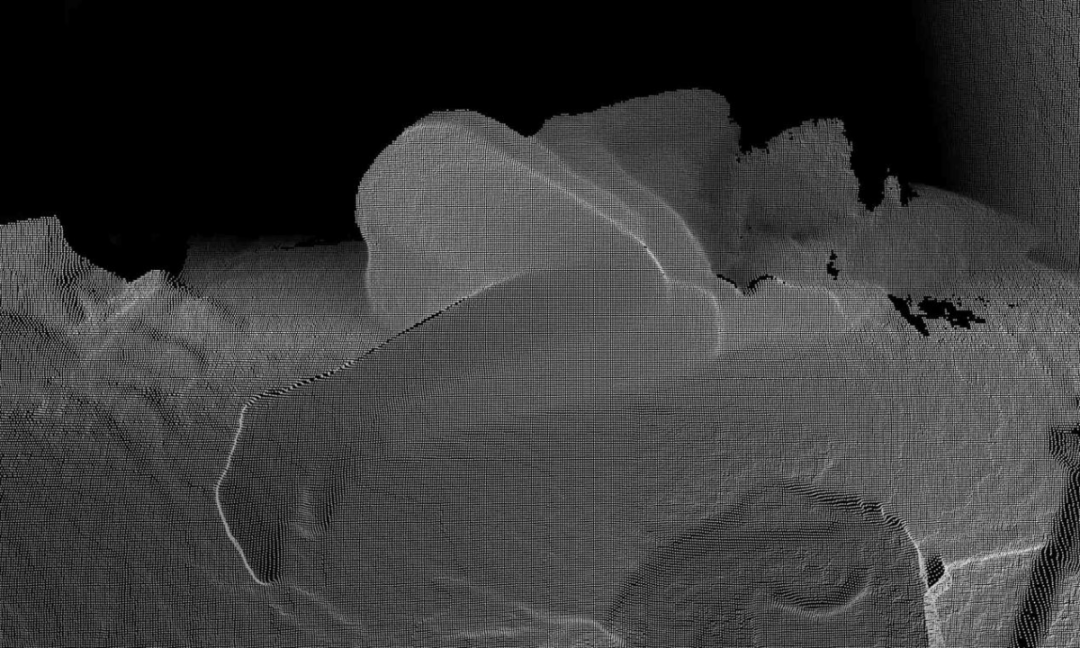
大家可以看到这些石头一样的东西,都是宜兰河上游的那些河堤,然后,最近的这一张有个像田螺那样的,这个就是宜兰人有一个习惯,就是会在河堤上面野餐,喜欢喝啤酒、吃田螺,就是那种酱田螺,吃完以后就会被丢在河堤草地上面,那天我发现了它,蹲下来拍了一张。
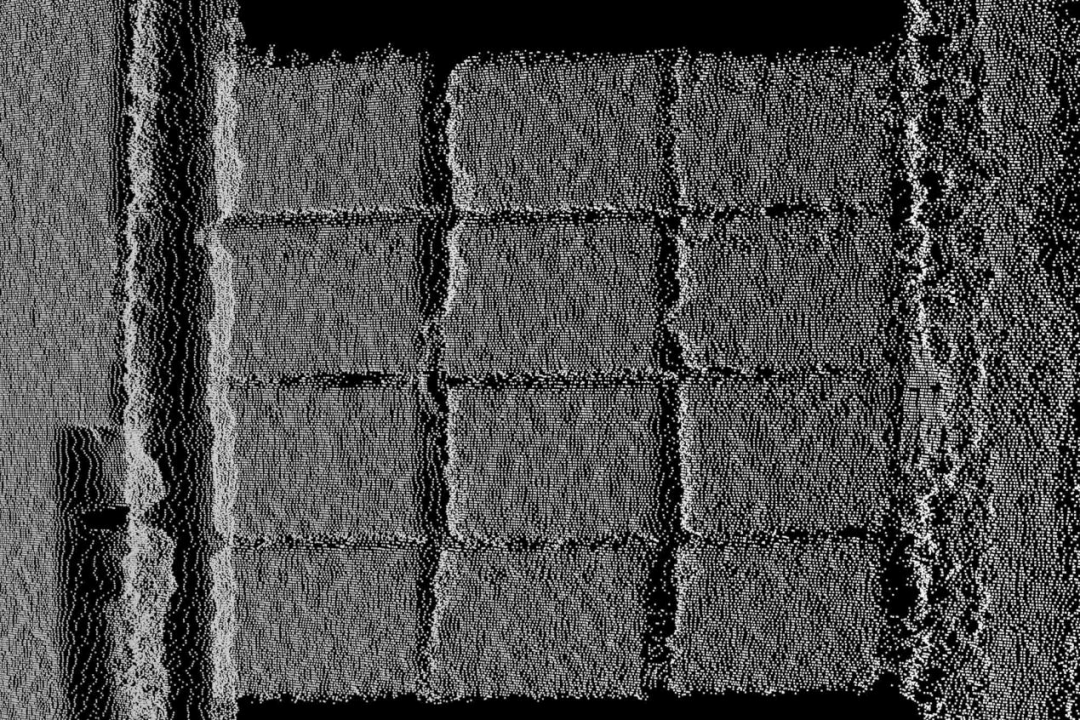
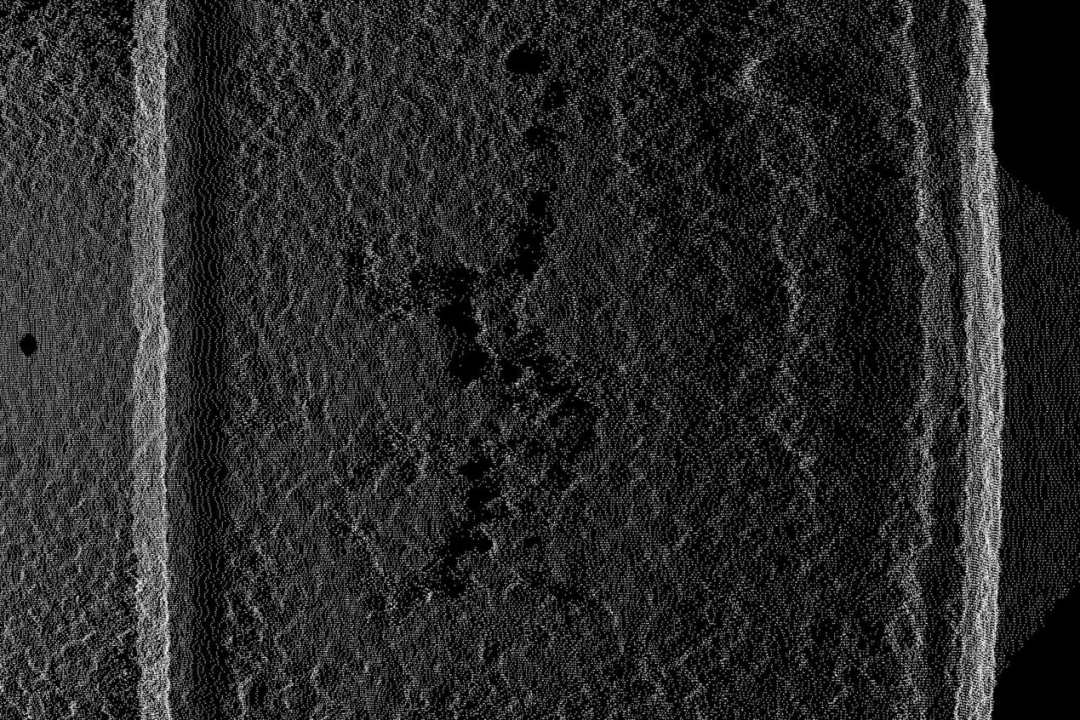
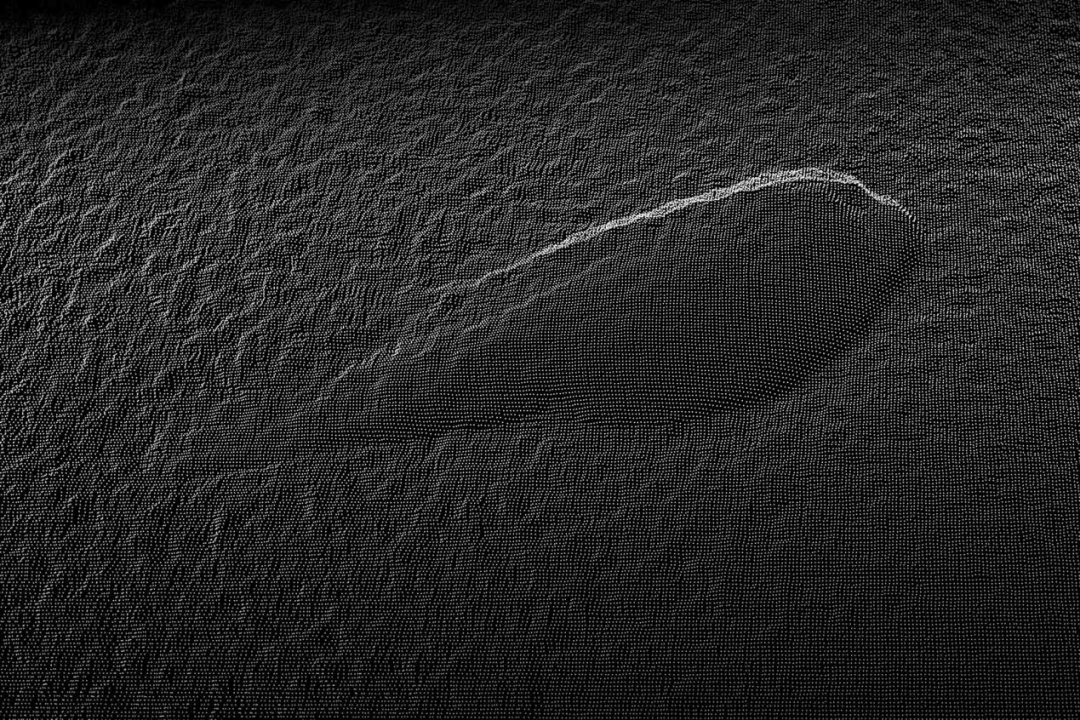
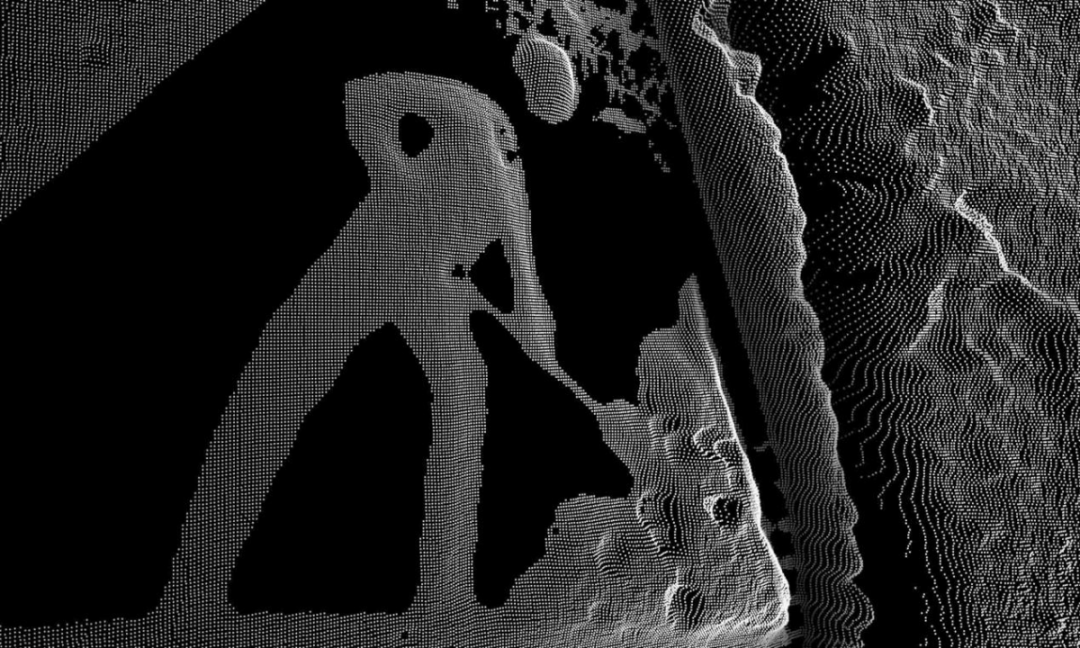
这两张照片,第一张就是宜兰河河堤上面的苔藓,这就是鲁鲁看到的苔藓的样子,然后,第二张有很多小洞的,是我回去坐公交车等车的时候,在那个车站它的广告牌,它中间放了一块广告牌,剩下的就是没有放,是空的,就是那个有洞的板子。
这两张照片,上面那张就是我在路边发现的一个卖鸟的一个大叔,他鸟笼里面有很多的小鸟,这些本来应该自由飞翔的小鸟都被关在笼子里面。然后紧接着就在街对岸,我发现了房地产中介,上面其实挂的都是广告,我觉得很有意思,就是我看到这个,我会走近看他们房价怎么样,其实也会有这种深受其扰,后来通过鲁鲁的眼睛,我发现在他看来没有任何的意义,就是全部这些卖房子的广告都是空白的,一张一张一张一张都没有任何意义,就让我想到那些住在笼子里面的小鸟。
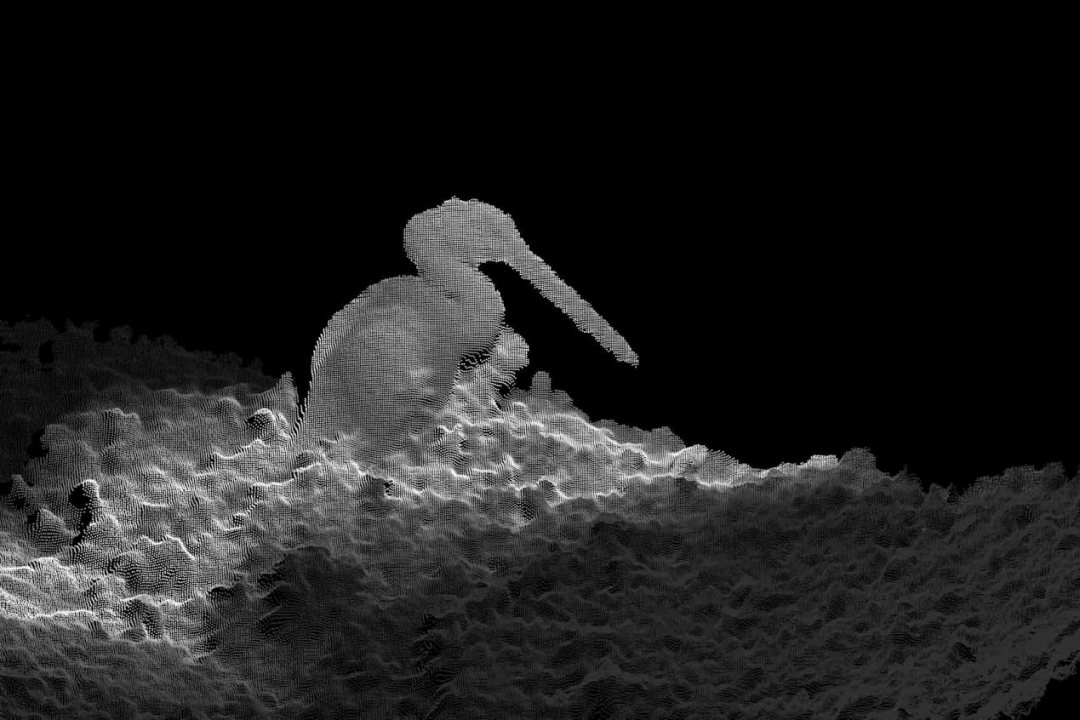


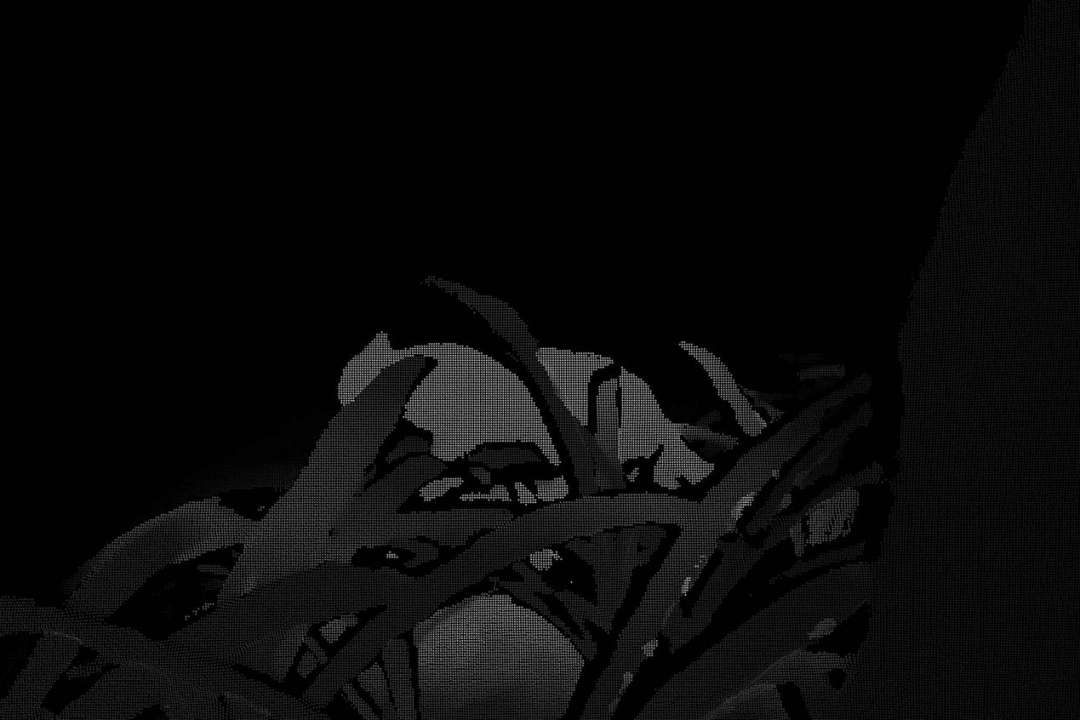
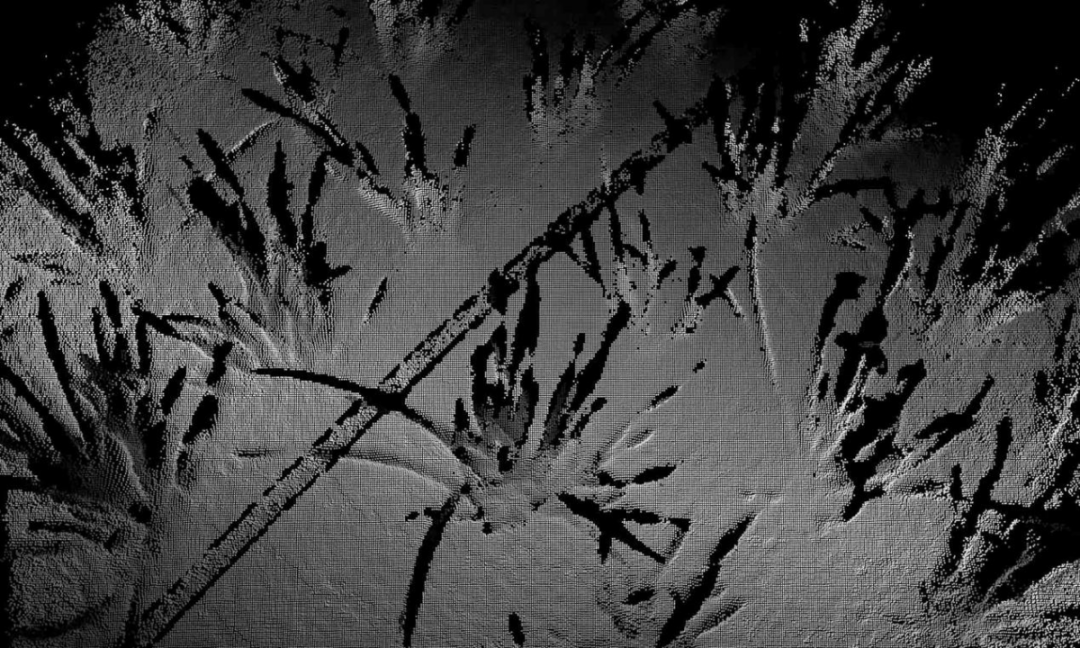
后面我就有点关注路上会看到的各种各样的鸟类,然后这个白鹤其实是假的,它就在那个路中间,因为它确实很怕人,我一走进它就飞掉了,所以我只能拍个假的,然后,下面两只小鸟是麻雀,它们是真的,是在不算市中心稍微偏一点的地方,有一丛芦苇荡,然后上面住满了麻雀,在那里求偶,在那里吃饭,但是我走近以后,他们好像觉得我不会干扰或发现它们,它们就躲在那个芦苇荡里面,然后我就去拍他们,我就很惊喜,拍到了这些画面,因为我自己看麻雀其实也没什么意思,但是通过鲁鲁的眼睛看过来,我就觉得,就很不一样。
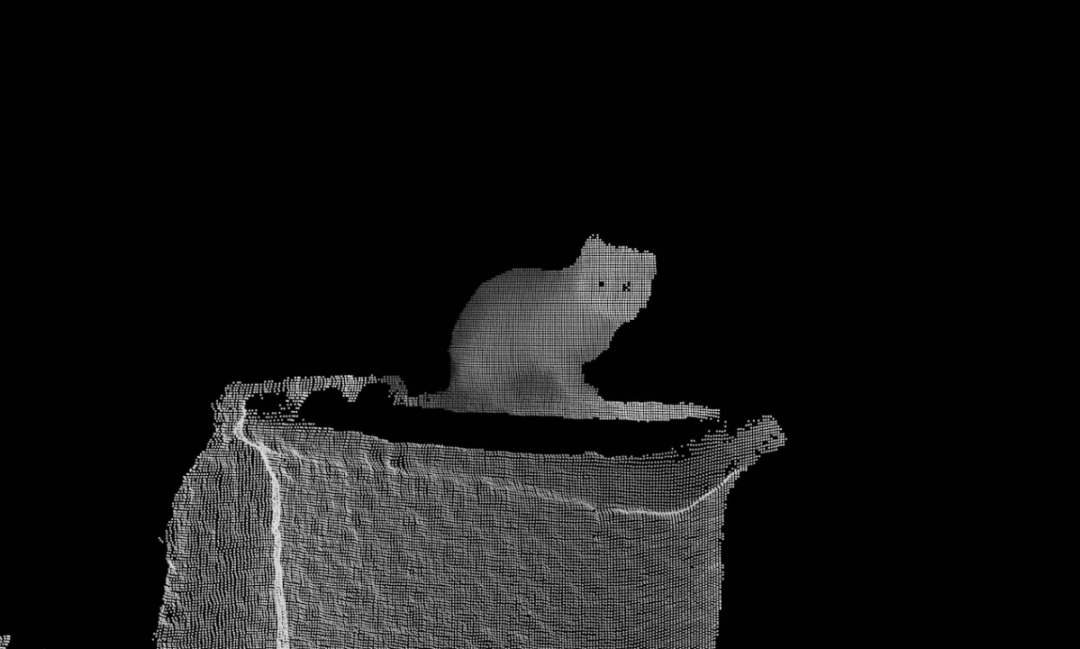
这是一只小猫,很有意思的是,其实我在拍摄的时候没有办法很清楚的看到这只小猫,因为那时候天几乎是全黑的,路灯也很少,但是因为鲁鲁观看的方式是自己发射激光,然后再接收自己发射的激光,它不需要任何外界的光线,所以我通过显示器反倒能更加清楚的看见,这只小猫在草丛后面鬼鬼祟祟的样子,给它拍了下来,也因为这一次,我后面就做了一些太阳光和鲁鲁自己观看的光线之间的一些实验,但就停留在好玩,也不成完整的作品,我也就先不拿出来。

这两张照片有3个水泥管子,宜兰本地人会在需要祭拜先祖的时候,在这个水泥管下面烧金纸给自己的祖先,然后这个石碑其实就是泰山石敢当,因为当地的宜兰河在被殖民者治理之前,其实是常年犯洪涝灾害的,所以,它这个石敢当这个石头上面会多一点,然后泰山石敢当那个泰字下面的水会少一点,寓意就是希望水少一点,然后堤坝牢固一点。
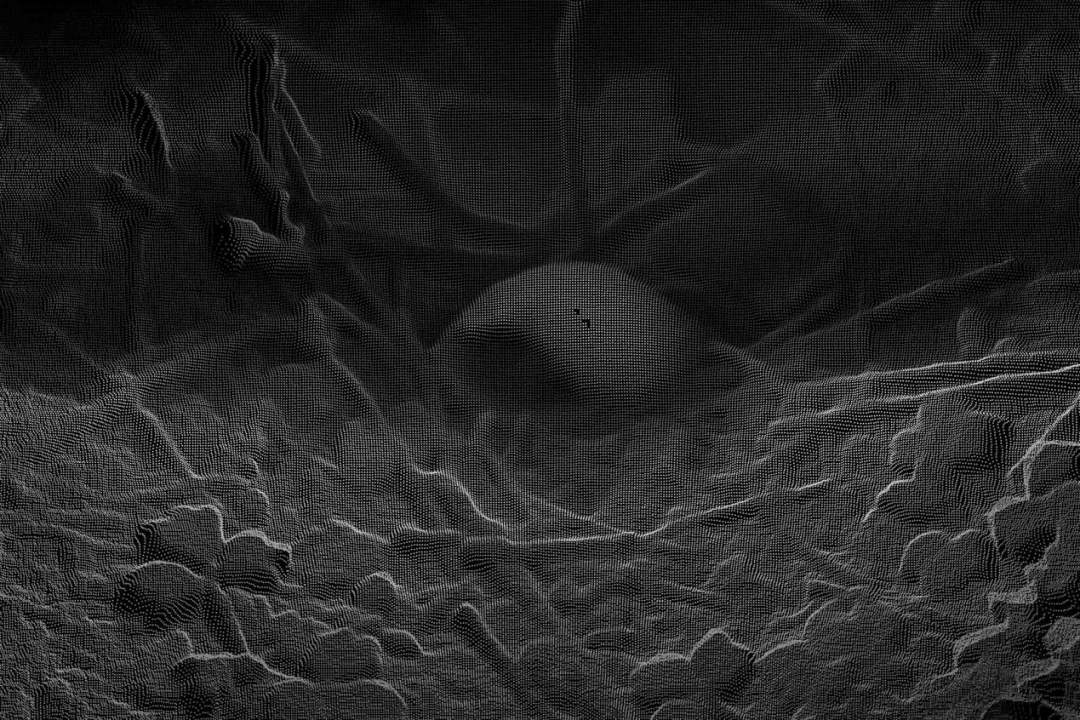
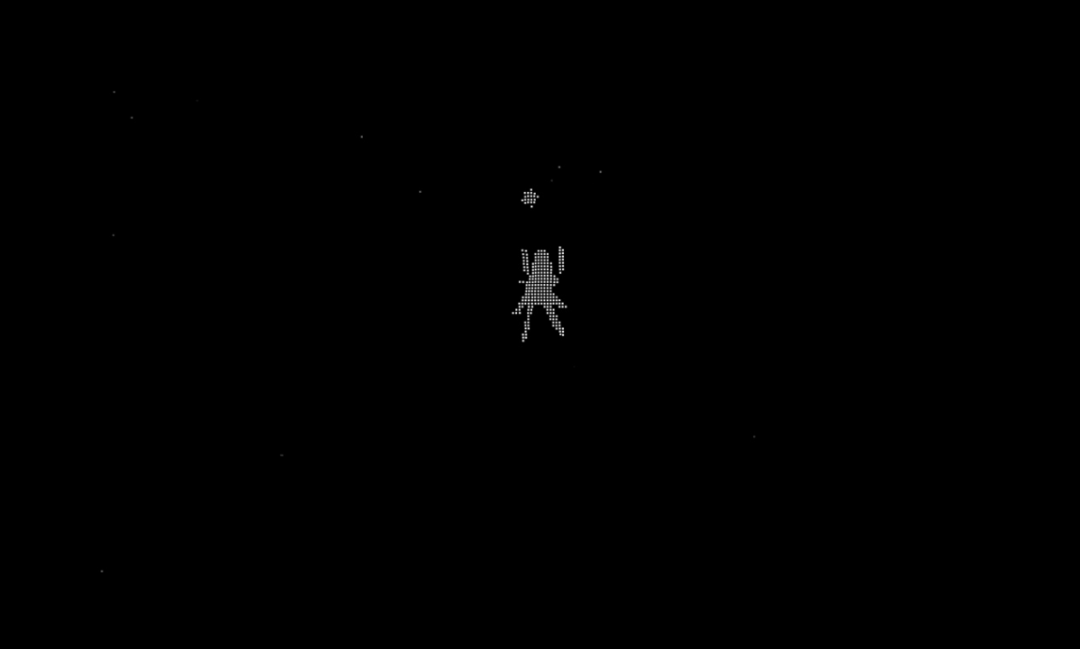
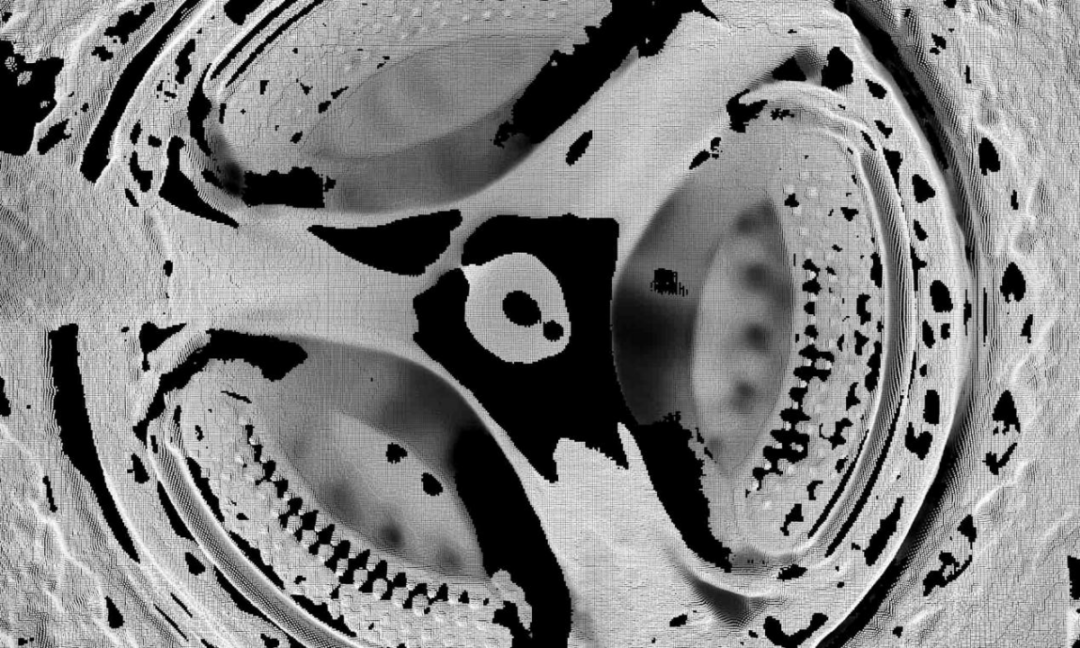
我就再走到宜兰河下游,就要到入海口了,到入海口之前,我发现了一个破房子,上面有破掉的玻璃,然后在玻璃上面有小虫子爬过的痕迹,其实,肉眼看不太明显,然后我就好奇用鲁鲁来观看,我就通过那个显示屏看,又完全不一样,就是小虫子爬过的这个痕迹,它可能跟玻璃的光线的反射率不一样,有折射,我也不太懂,然后就能把小虫子爬过的痕迹很清晰的展现了出来,我觉得太厉害了,我就是很喜欢。

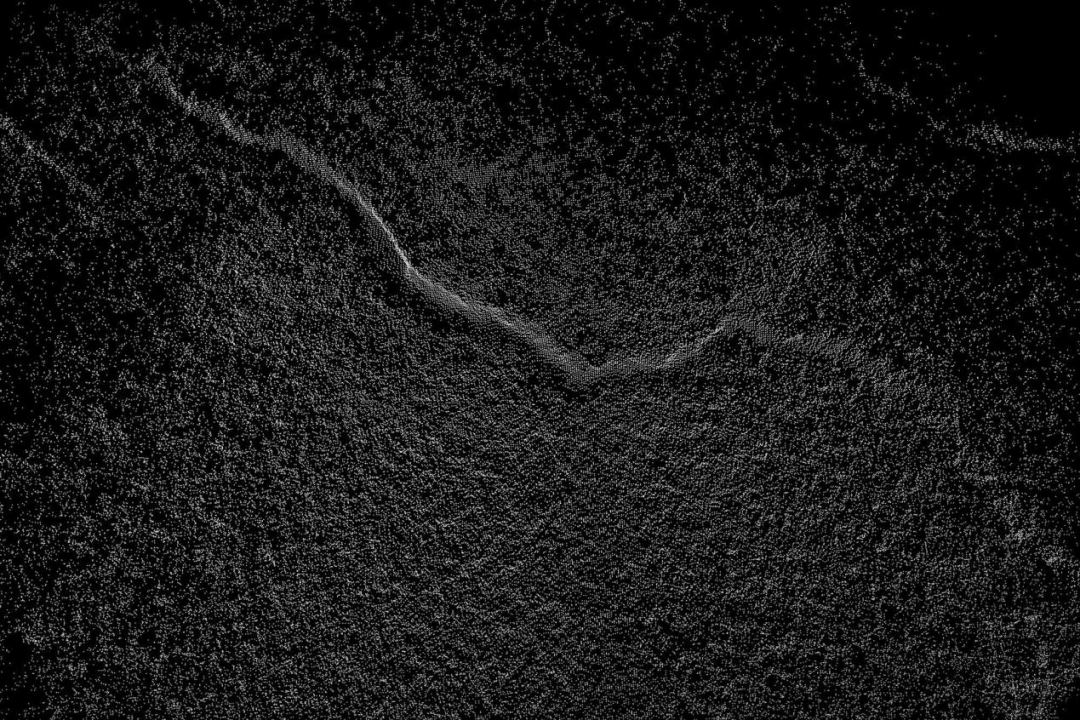
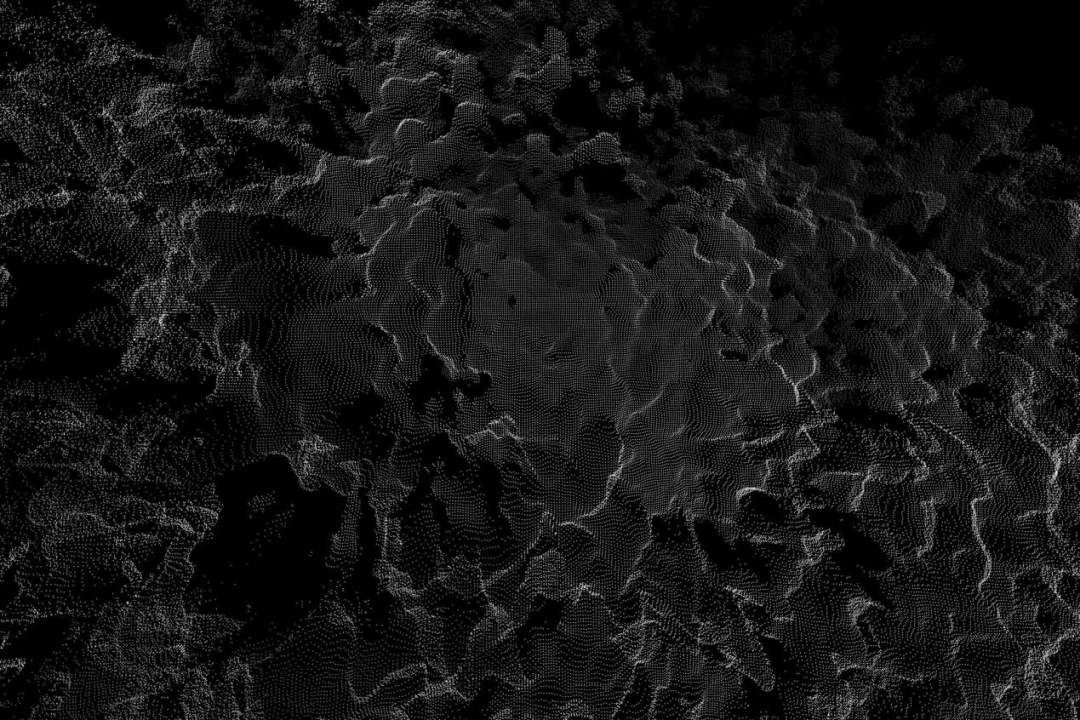
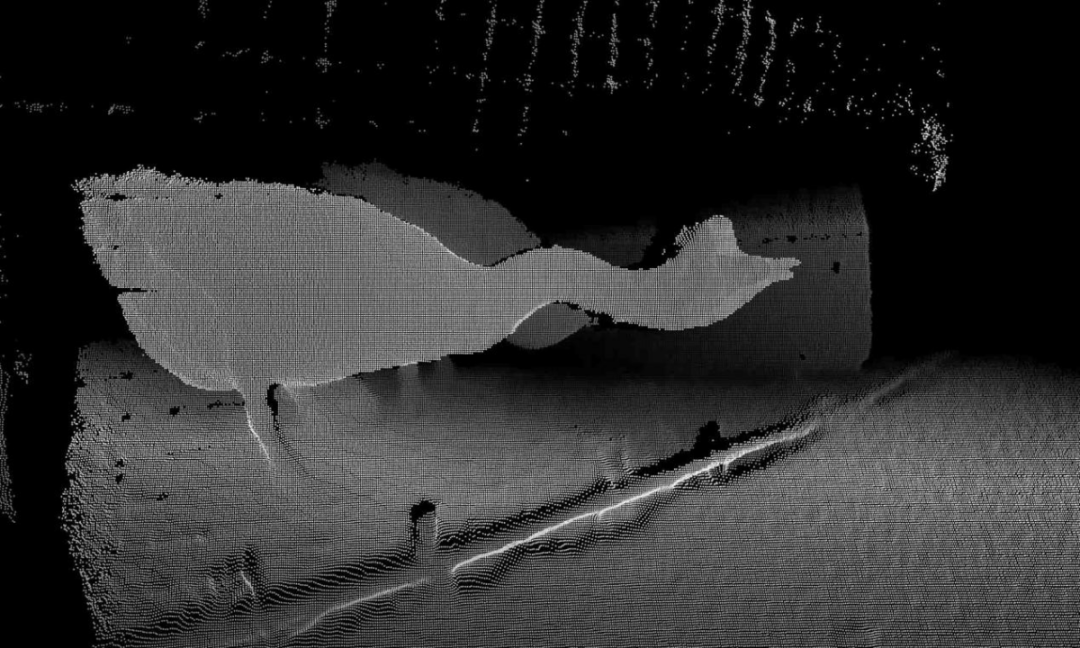
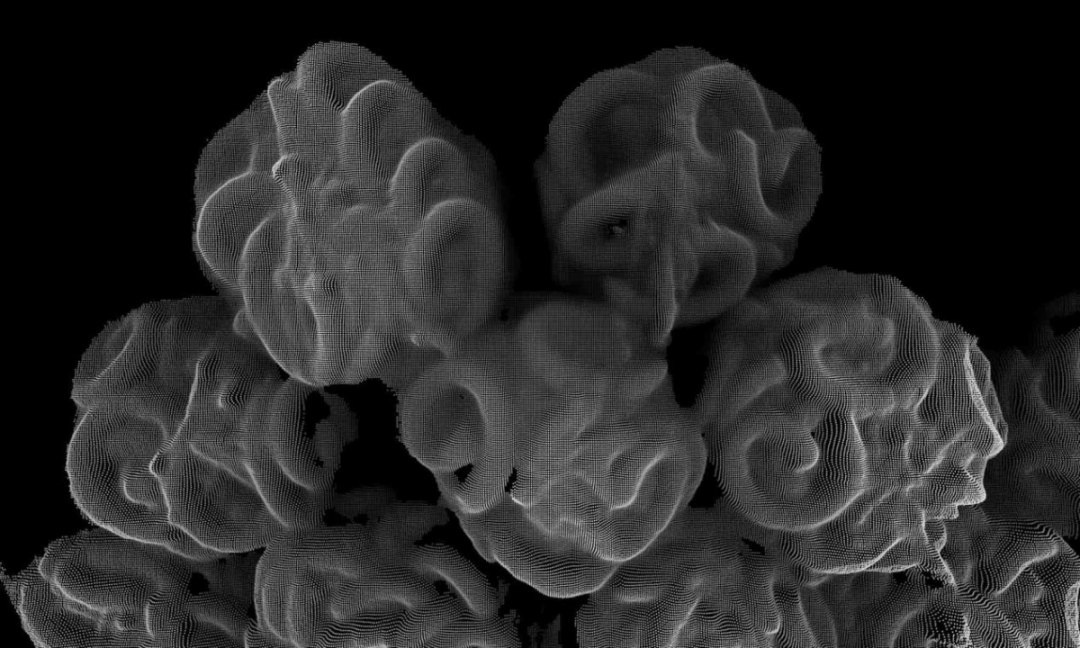
到入海口,沙滩上这个像帐篷一样的东西,当地人会在沙滩上支一个大帐篷,涨潮的时候在上面钓鱼,潮退的时候,那个帐篷就立在沙滩上,很有趣;第二张这个像受精卵一样的东西,其实就是当地的少数民族阿美族,他们每年有一大段时间,会在宜兰河的入海口捕鳗鱼苗,但是鳗鱼苗是全身透明的,在拍的时候,肉眼看,你都要很仔细才能看清楚,但我拿鲁鲁去观看的时候,所有小鱼苗都原形毕露,很有意思,然后我就拍了好几张,回去以后,发现有一张很好玩,很像受精卵,我就给它放进来了,最后这个是海浪,我拿鲁鲁去拍摄海浪,然后发现跟人眼看到的也不一样。

最后一张,就是这两张里面有一张是最后一张,就是比较光滑的那条鱼,是我在沙滩上发现的一只死鱼,那个细节比较多的鱼,是我在宜兰城的文化墙上面,发现当地的雕刻艺术家所雕刻出来的鱼,这两条鱼,我肉眼看明显就是那条死掉的鱼细节更多,但我拿鲁鲁去观看的时候,很明显它看不出很多细节,它对于一条活生生的死去的鱼,它拍到的就是光溜溜的一个造型,但它对于一个被刻出来的本身就没有生命的鱼,它却能看到更多的细节,蛮好玩的。对于《宜兰河》这个作品,我就不做完整的分享了,因为发现以这种方式不太合适,接下来,我给大家分享一下2025年拍的其他照片,之前没有拿出来过。
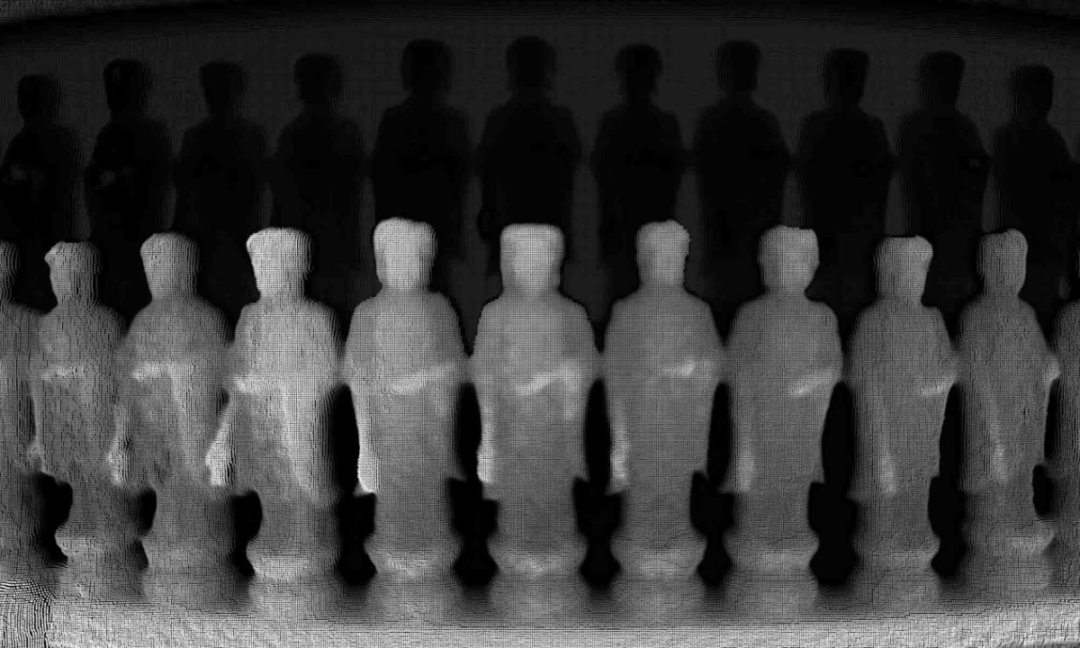
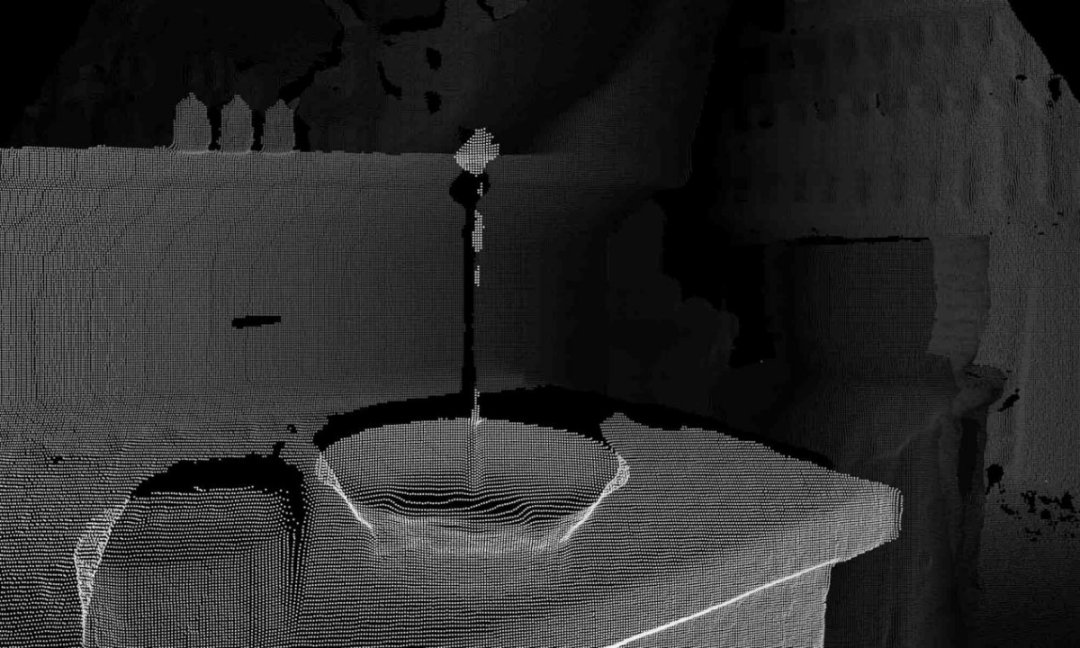


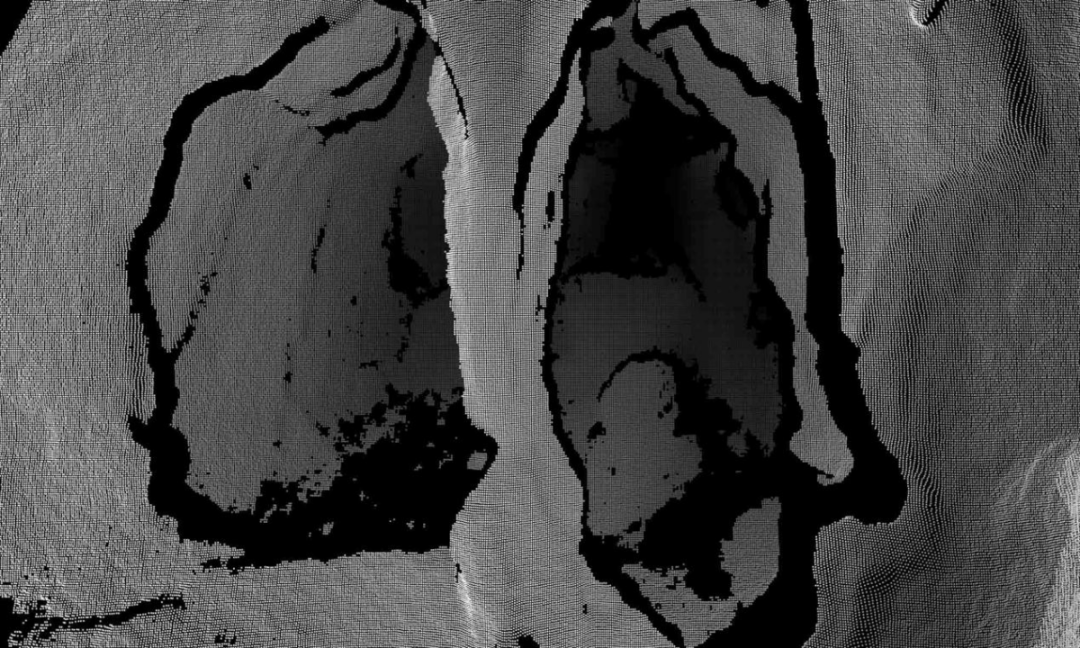
这4张照片是我在舟山岱山县寺庙里面拍的照片,有烛台,还有小的菩萨、大的菩萨,我就不多做展示,因为我也是在探索整个过程,我觉得这些画面很精彩。
但因为我最开始拍摄的时候,有人提醒我说,拍菩萨会不会不尊敬,但是我就在想,如果机器人鲁鲁在观看的话,它是一种什么感受,宗教对他来说又会以什么样的方式呈现?种种想象就开始,我就让它拍了很多,后面我也去杭州的飞来寺拍了一些画面,我发现跟人眼看到的确实会有很大不同。



这4张照片就是在飞来寺拍的洞穴,包括佛的一些造像,就不多说了。


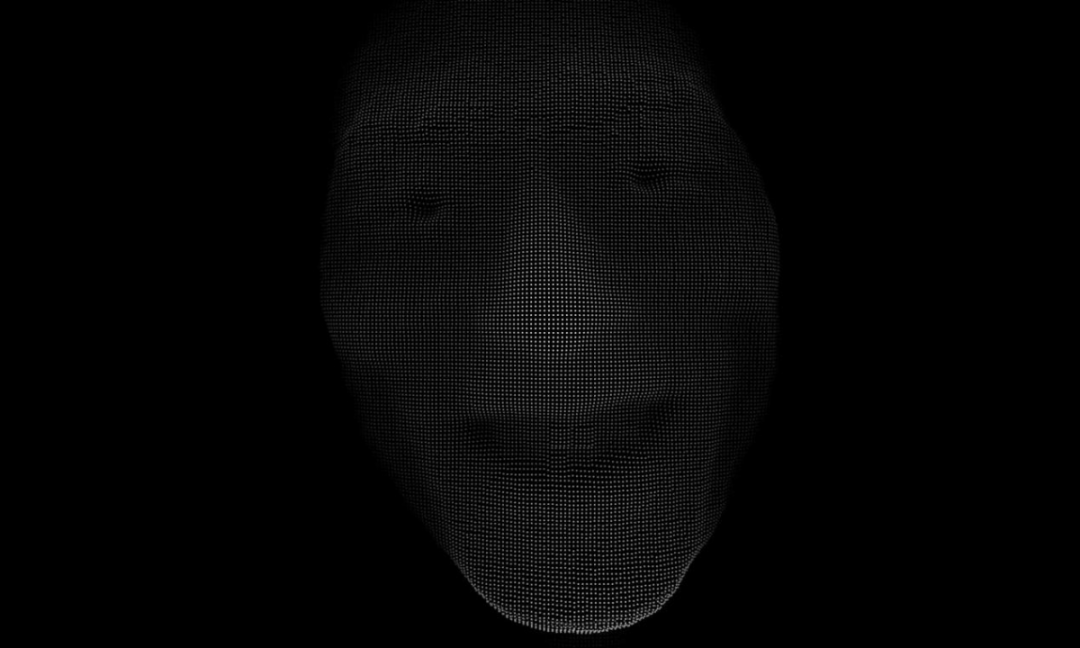
当然,我也拍了一些真人,比如说我的好朋友,我的女朋友,还有泥美术馆的馆长傅老师和他的孩子。


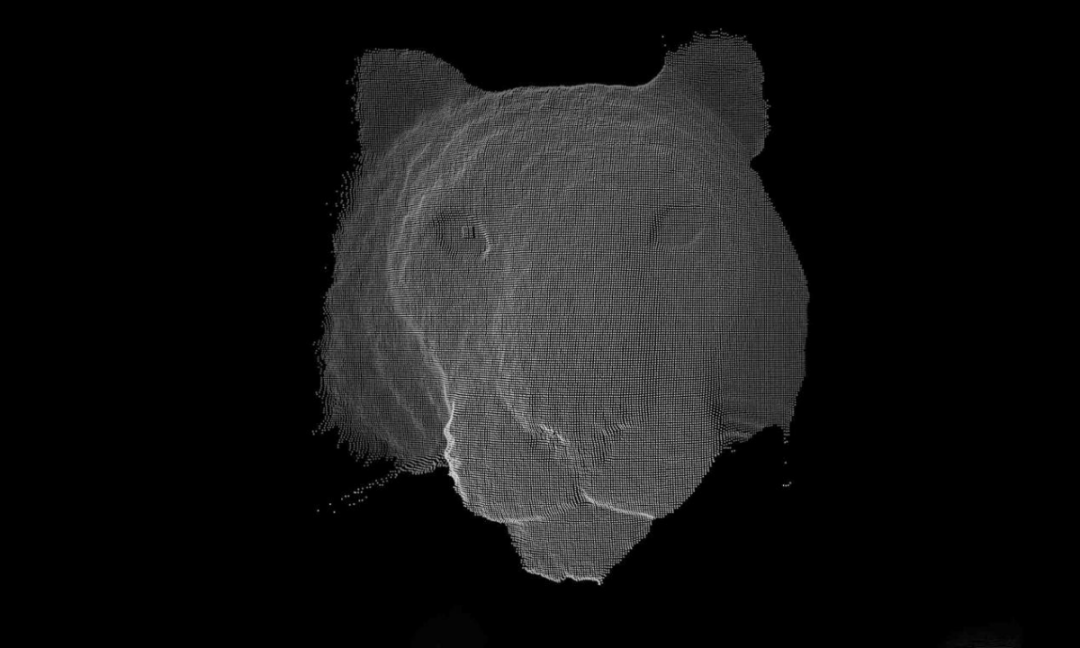


除此以外,也拍了一些动物,比如说蛇、小猫、蜘蛛、大鹅,还有老虎,很酷,这个老虎跟我另外拍的一个先生特别的像。
再到后面,到下半年开始,我意识到一件事情,我要拍我非常无聊的针对主题的那种影像,就是我日常生活中的一些画面,机器人看到会怎样,因为现实世界中机器人还没发展到这一步,它只能在大街上、在扫地机器人那个视角里去观看世界,但是,像以我活生生人的视角,看到很多吃、喝、拉、撒这种东西的视角观看还很少,我就开始转向一些极其日常、普通的状态下去邀请鲁鲁来观看。

照片我就不再多放了,后面我拍的都是这种日常琐碎的东西,比如我在街上看到好奇的,鲁鲁看这个是什么样子,我就会拿摄像机拍一张,也没有什么针对性,或者说今天发生了一个很有意义的时刻,比如说家人生日或怎么样,我也会把鲁鲁拿出来一起拍个照片,就是这样,但是之前拍摄的时候,我只拿鲁鲁去拍摄,然后发现了一个很大的问题,就是我后续用这种纯点云画面来展示它依然不够生动,如果有一种对话产生,它需要一种普通RGB的画面去拍,所以,后面我又改了策略,鲁鲁拍完一张,我会拿手机,就是日常的再拍一张,但不会是一模一样的角度,就是告诉你说,这个是什么,这个是一只老虎、这个是个蛋糕,而是以记录事件、记录日常的方式拿手机再拍一张,我就不再多展开。
在这边也不做更多的图片的分享,那一部分图片之后会编成一本书,以更加完整的方式来给大家展现,也是希望自己这个项目可以到头了,我在过去的一年多里面,都是在探索鲁鲁所看到的世界到底会是什么样子的,没有考虑过我最终要做出一个什么样的作品,现在有这样的想法以后,就开始编辑,这也是一次创作完成前的阶段性的汇报,希望大家批评指正,感谢大家花时间听我在这里啰里吧嗦,谢谢。
END