夜雨聆风
夜雨聆风





FANUC-线追踪指令说明(一)
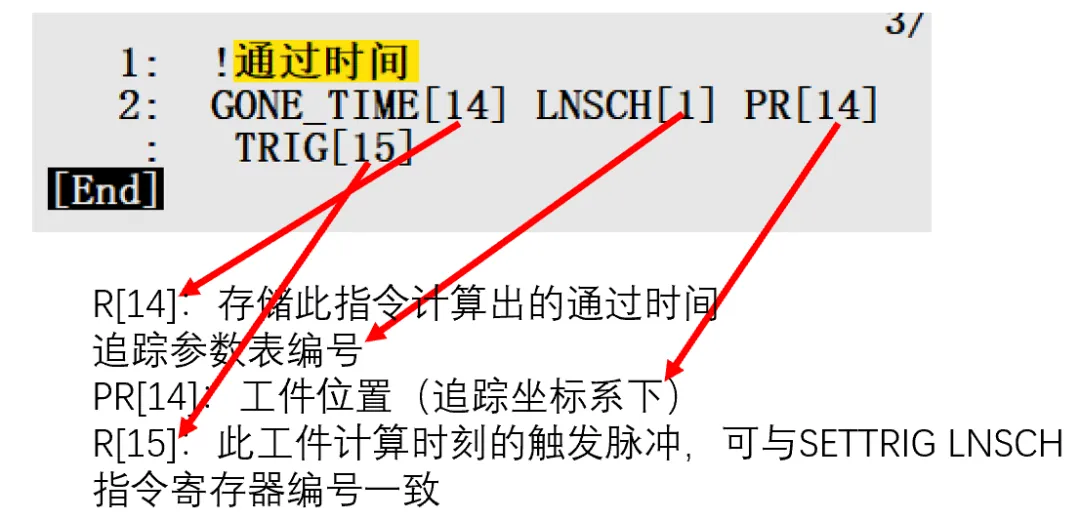
1.GONE_TIME
计算指定位置工件通过追踪区域的时间。
案例:
在运行轨迹前,计算此工件(用P[1]点表征工件位置)通过时间。而已知,机器人此轨迹节拍在20s,那么如果通过时间小于节拍时间,跳过轨迹执行。
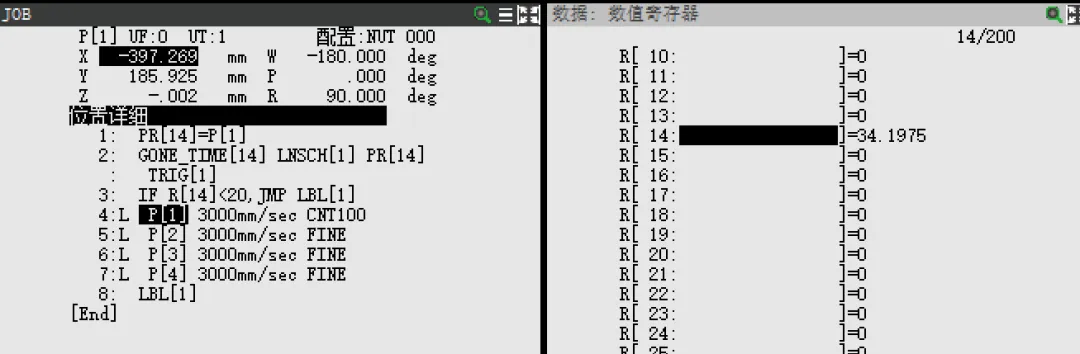
此时间如何计算的?
已知传送带速度50mm/s(变量$LNSCHCNVSPD),边界-600~1327(追踪参数表中定义,边界是追踪坐标系下X的位置),上述案例工件位置X=-397.269,(397.269+1327)/50≈34,即此指令计算出的R[14]值。
但是此指令有个问题,其不会考虑边界的影响。其计算仅考虑了工件位置和边界下游位置。如果工件位置在追踪区域上游(就是在上边界上游),虽然通过时间可能是34s,而工件运动到上边界期间,机器人仍然无法动作,所以机器人实际能动作时间并不是34s,那么此时间就不具参考意义。使用时需注意此问题。
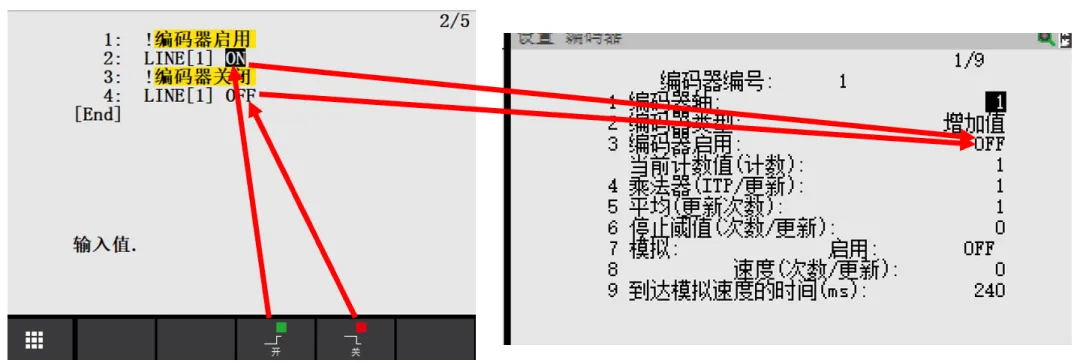
2.传送带追踪启用
3.传送带追踪模拟
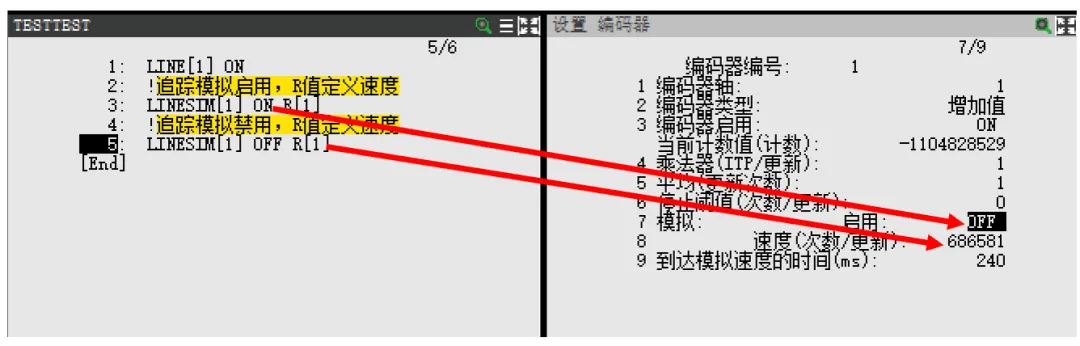
对编码器列表中,模拟项ON/OFF切换。并通过数值寄存器值定义“速度(次数/更新)”。
由于机器人每次重启,“7 模拟”默认恢复OFF,“8 速度(次数/更新)”恢复为0,为了避免手动输入,可在程序中,通过此指令启动模拟并速度赋值。
使用追踪模拟时,需要保证“3 编码器启用”为ON状态,否则启用模拟会出现下述报警。
传送带模拟应用,可参考以下文章内容。文章中使用的是变量方式,其实通过此指令即可。
另外,如果是使用模拟,应断开外部实际编码器连接。或者,将“2 编码器类型”修改为“模拟”,以保证功能逻辑正常。
4.传送带追踪计数
将编码器列表中“当前计数值(计数)”值存储至指定数值寄存器。
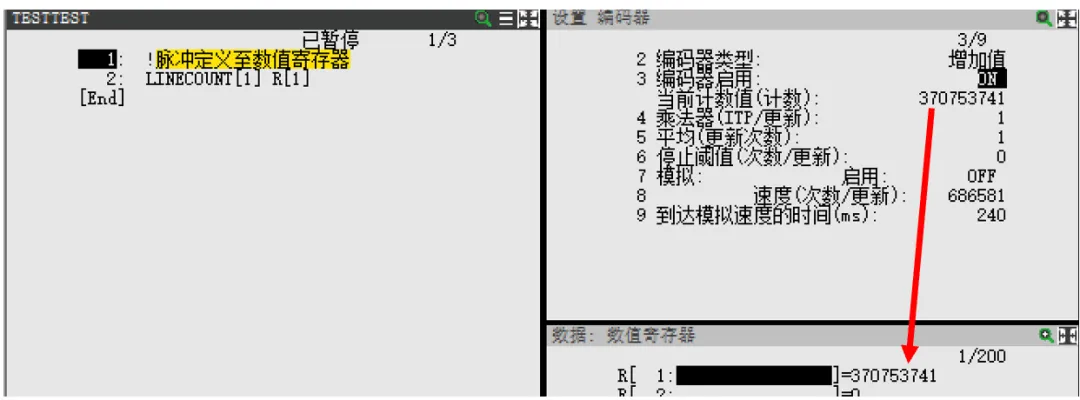
需要保证“3 编码器启用”为ON状态,否则运行会出现下述报警。
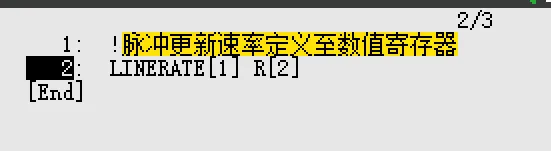
5.传送带追踪速度
此指令虽然名称是追踪速度,但是实际指的脉冲更新速率,并不是传送带速度。
其值越大,也意味着传送带速度越快。
此值有正负之分,对应传送带正反转。
一般以此判别传送带是否启动以及转动方向。
需要保证“3 编码器启用”为ON状态,否则运行会出现下述报警。
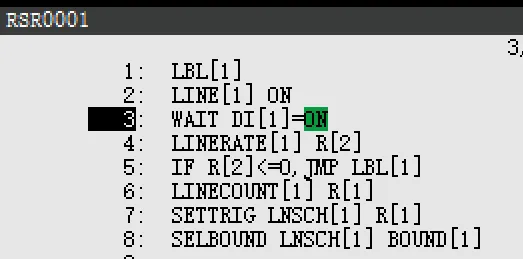
案例:
在获得触发信号后,如果检测到传送带速率为负值(追踪方向应为正值),则重新等待触发信号。
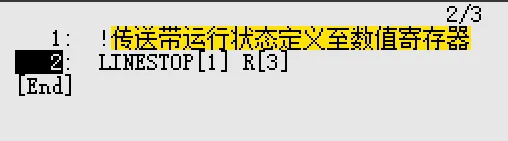
6.传送带追踪停止
获得传送带运行状态,1表示传送带停止,0表示传送带运行中(不管是正向还是反向),值赋值至指定数值寄存器。
需要保证“3 编码器启用”为ON状态,否则运行会出现下述报警。
功能结果上,和LINERATE有一定重复。LINERATE也可以表征传送运行状态,且可表征运动方向。
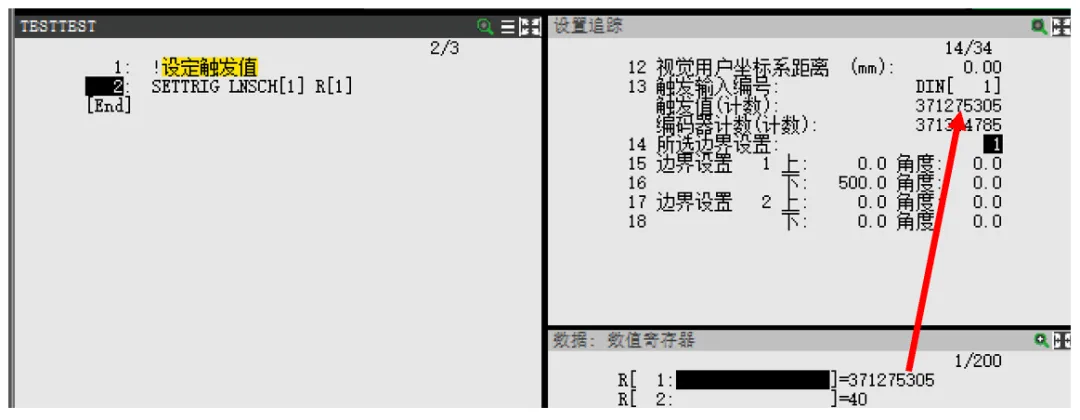
7.设置触发
将指定数值寄存器中已存储的编码器值赋值至追踪列表中的“触发值(计数)”项。
一般与LINECOUNT指令搭配使用。