 夜雨聆风
夜雨聆风





FoxBMS2 源码分析 (1) | 全局概览
1. 前言
FoxBMS2 不是一套单文件 main 函数 + 几个外设驱动的小项目,而是一套明显带有车规软件工程风格的大型系统。
构建系统不是简单把src/**/*.c全部喂给编译器,而是先做路径检查、版本一致性检查,再组织源码。启动流程也不是初始化完外设就while(1),而是把硬件初始化、自检、OS 创建、队列/任务创建、调度器启动分成了明确的阶段。
这一篇不追求把所有模块讲完,而是解决一个更基础的问题:FoxBMS2 是如何从一个仓库目录,变成一份真正可运行的 BMS 固件的。
2. 仓库结构
从工程目录看,FoxBMS 2 的核心可以分为四层:
2.1 业务与驱动主体:src/
src/app是项目最重要的目录,里面实际上又分成三层:
application:业务层。比如 BMS 状态机、均衡策略、SOC/SOE/SOH 算法、合理性校验。
engine:中枢层。比如数据库引擎、诊断模块、系统状态机、系统监控。
driver:设备驱动与板级抽象。比如 AFE、CAN、SBC、Interlock、IMD、SPI、I2C。
除此之外还有:
src/app/task:任务创建、OS 适配、周期任务起点。
src/os:FreeRTOS 相关集成层。
src/portable:芯片与工具链相关的可移植层。
src/bootloader、src/version:分别负责引导程序和版本信息。
如果你把 FoxBMS2 理解成应用层代码直接操作硬件,那后面看源码会很痛苦。更准确的理解是:应用层只表达意图,驱动层只操作硬件,中间通过引擎层和任务层串起来。
2.2 配置并不是点缀:conf/
FoxBMS2 对配置的依赖非常强。根目录wscript里明确把conf/bms/bms.json作为关键配置输入,并在构建阶段校验它的哈希值。
这意味着两个结论:
1. 仓库不是写死一套 BMS 参数的 demo,而是能按配置裁剪和约束构建的复杂工程。
2. 改配置不只是改运行参数,很多地方会影响生成结果和构建合法性。
2.3 工具链是工程的一部分:tools/ 与 fox.py
FoxBMS2 不是把脚本工具当边角料,fox.py、tools/waf-tools、tools/dbc、文档工具链都被纳入了标准开发流,特别是fox.py很值得注意。源码开头就先做了两件强约束:
必须使用 Python 3.12。
必须从仓库根目录运行。
这类约束看起来严格,但它背后的工程意图很明确:减少环境影响,避免同一条命令在两台开发机上行为不一致。
3. 构建系统
3.1 先看构建变体:不是一个build
BIN_VARIANTS = ["app_embedded","app_spa","bootloader_embedded","bootloader_spa",]MISC_VARIANTS = ["app_doxygen","app_doxygen_unit_test","app_host_unit_test","bootloader_doxygen","bootloader_doxygen_unit_test","bootloader_host_unit_test","docs",]
-
主应用固件 -
Bootloader -
静态分析或 SPA 相关构建 -
文档构建 -
主机侧单元测试
更重要的是,脚本不是手写 build_app_embedded()、clean_app_embedded()这些函数,而是通过遍历BuildContext、CleanContext、ListContext、StepContext动态生成对应命令。这是个很典型的 Python 化 Waf 用法:把构建命令本身也做成数据驱动。
3.2 configure()做的事情,比很多项目的build()还多
1.路径不能包含空格
-
docs/general/changelog.rst 中的版本号。 -
src/app/main/main.c 里的 @version 注释。 -
其他源码文件对应的版本注释行。
4.编译器可用性和运行库完整性检查
3.3 build() 阶段真正做的约束
-
必须显式指定变体。没有 bld.variant 直接报错。 -
SPA 相关构建命令必须排在最后。源码里专门检查命令序列顺序,避免 SPA 补丁影响正常构建流程。 -
conf/bms/bms.json 哈希必须与 configure 时一致。如果配置变了但没重新 configure,构建会直接失败。
if bld.variant in("app_embedded","app_spa","bootloader_embedded","bootloader_spa",):bld.recurse("src")
4. fox.py 的角色:不是别名,而是开发入口
-
固定 Python 版本和工作目录。 -
把命令统一转发到 cli.cli.main()。 -
让构建、文档、工具命令都通过同一入口执行。
5. 从 main.c 看真实启动顺序
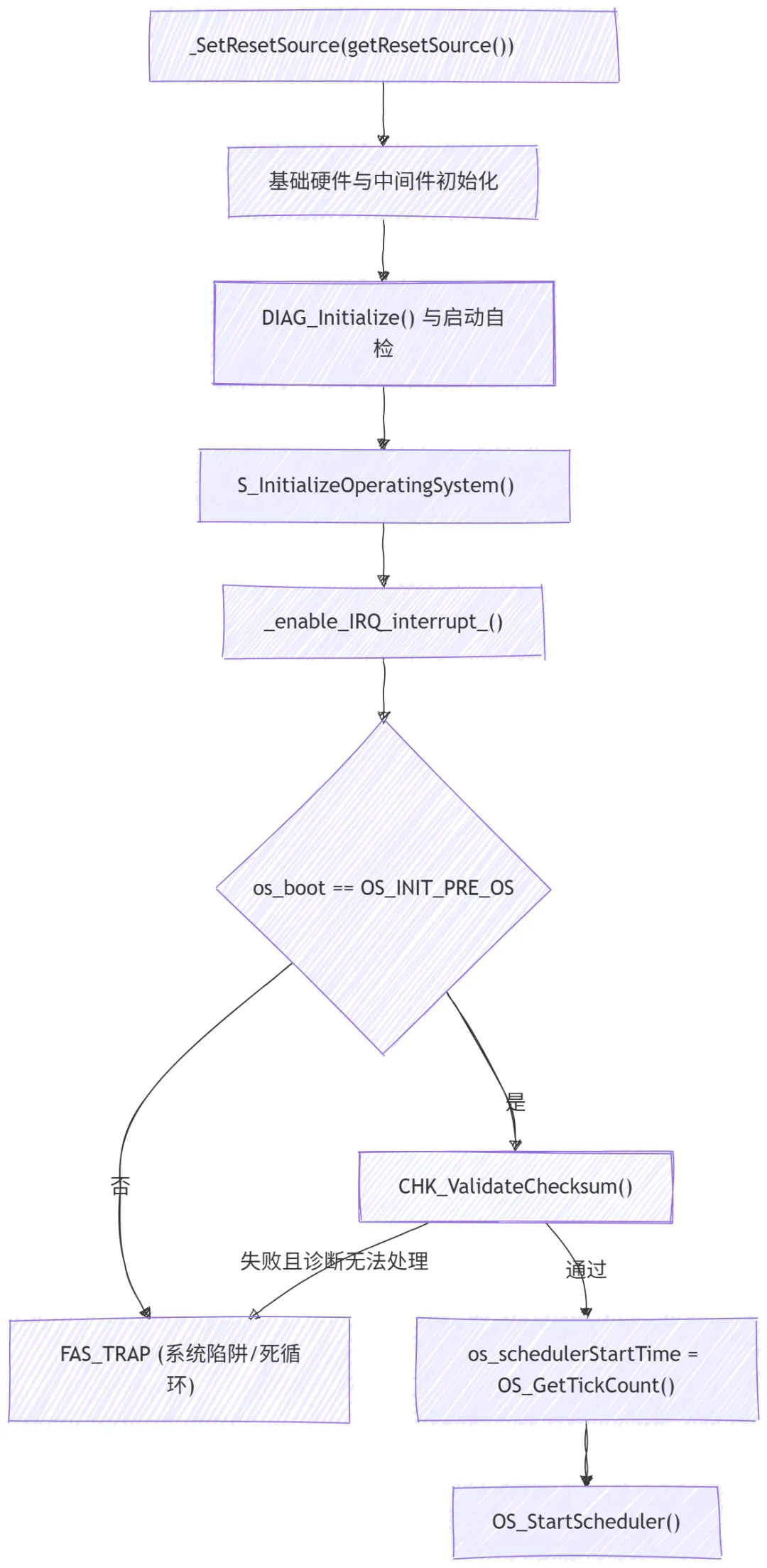
5.1 第一阶段:硬件与基础中间件初始化
MINFO_SetResetSource(getResetSource());muxInit();gioInit();SPI_Initialize();adcInit();hetInit();etpwmInit();crcInit();LED_SetDebugLed();I2C_Initialize();DMA_Initialize();PWM_Initialize();DIAG_Initialize(&diag_device);MATH_StartupSelfTest();
5.2 第二阶段:创建 OS 资源,而不是立刻启动任务
OS_InitializeOperatingSystem();-
OS_INITIALIZE_SCHEDULER -
OS_CREATE_QUEUES -
OS_CREATE_TASKS -
OS_INIT_PRE_OS
5.3 第三阶段:为什么中断在调度器前开启?
/* Enable IRQ interrupt after creating the AFE task to prevent the DMA interrupt, because the function called on DMA interrupts require an valid AFE task handle, which is NULL before creating the AFE task. */_enable_IRQ_interrupt_();
-
中断不是随便什么时候开都行。 -
这里要等 AFE 任务句柄已经创建好,否则 DMA 中断回调依赖的任务句柄还是空指针。
5.4 第四阶段:启动前最后两道门槛
5.5 第五阶段:调度器接管
os_schedulerStartTime = OS_GetTickCount();OS_StartScheduler();
6. 这一篇真正应该记住什么
-
构建层面:根 wscript 先确保环境、配置、版本、命令序列都合法,才允许构建进入 src。 -
运行层面:main.c 先完成硬件和基础模块初始化,再创建 OS 资源、校验镜像、最后把控制权交给调度器。
常见误读
-
不要把 main() 误解成完整业务初始化已经完成的位置。按当前实现,main() 只把硬件、诊断、自检和 OS 资源准备到可以启动调度器的边界,后续系统拉起仍要在任务上下文里完成。 -
不要把根 wscript 和 fox.py 误解成薄包装脚本。当前仓库里,Python 版本、工作目录、路径长度、版本一致性、配置哈希和构建变体顺序,都是在这两层入口附近被显式约束的。
7. 小结
-
根 wscript 是真正的工程入口,它不只是构建脚本,还是环境和配置约束器。 -
main.c 不是业务逻辑入口,而是硬件、诊断、自检、OS 和调度器切换的边界层。
推荐阅读顺序
-
先看根 wscript 中的 configure(),理解 FoxBMS 为什么把环境和版本检查放在构建入口。 -
再看同文件中的 build(),确认构建变体和 src 递归是如何被约束的。 -
接着看 src/app/main/main.c 中的 main(),把硬件初始化、自检和调度器启动串起来。 -
然后跳到 src/app/task/os/os.c 中的 OS_InitializeOperatingSystem(),理解 main() 交出控制权之前到底准备了哪些 OS 资源。 -
最后回到 CHK_ValidateChecksum() 所在路径,理解为什么镜像校验被放在调度器启动之前。
思考题:
main.c在OS_StartScheduler()之前调用了CHK_ValidateChecksum(),而不是把镜像完整性检查放到某个 10ms 任务里做。这个设计背后的取舍是什么?如果把校验推迟到调度器启动之后,系统会获得什么,又会失去什么?