 夜雨聆风
夜雨聆风





[TVCG2026]中科院软件所精准计算实验室提出基于主干提取与路径扫描的时空密度分布抽象化可视化方法
近日,中国科学院软件研究所精准计算实验室研究团队在时空密度分布可视化领域取得重要进展,提出了一种名为Strunkmap的抽象化可视化方法。该方法通过各向异性核密度估计、主干提取与路径扫描、以及堆叠主干图等创新技术,有效解决了多时序密度分布同时展示时的视觉遮挡与信息丢失问题。相关成果论文“Strunkmap: An Abstract Approach to Understand Spatiotemporal Density Distribution”已被可视化领域国际顶级期刊《IEEE Transactions on Visualization and Computer Graphics》(TVCG)录用,第一作者为博士生王鑫,通讯作者为杨立正高级工程师和张凤军研究员。
时空密度分布的可视化分析对于理解交通流变化、疾病传播、物种迁徙、城市发展等动态过程至关重要。然而,随着物联网和传感器技术的快速发展,海量时空数据对可视化方法提出了严峻挑战。传统方法在同时展示多个时相密度分布时,要么因直接叠加产生严重视觉遮挡,要么因数据压缩或过滤导致密度信息丢失。如何在有限的屏幕空间内无损地呈现多个密度分布并清晰展示其时空演化规律,成为领域内长期未解的难题。
针对上述挑战,研究团队提出了Strunkmap创新框架,其核心贡献包括:
各向异性核密度估计:传统核密度估计仅基于距离计算密度,忽略了方向性差异。研究团队引入方向权重机制,使密度估计能够体现地理、气象等现象中的各向异性特征,在温度等值线、车辆密度分布等场景中显著提升了密度生成的准确性。
主干提取与路径扫描:受图像骨架提取算法启发,团队首次将“主干”概念引入密度分布可视化。通过对密度分布区域进行骨架修剪与延伸,提取出能表征整体空间形态的主干结构,并结合Bresenham直线扫描算法建立主干到轮廓的路径映射。该策略在保持局部空间邻接关系的前提下,大幅降低了全局映射的计算复杂度。
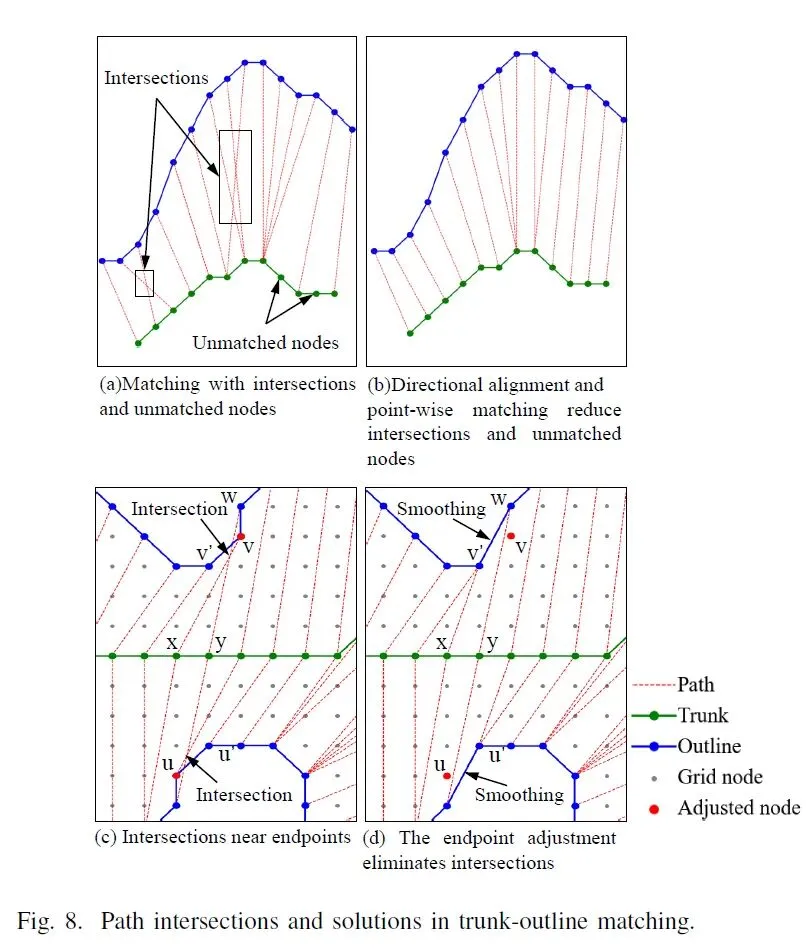
主干-轮廓匹配策略:通过方向对齐、逐点匹配与端点调整三种机制,确保生成的无交叉路径能够完全覆盖密度分布区域。相比基于最短距离的经典方法,该策略消除了锯齿伪影和视觉间隙,保障了密度网格的均匀映射。
堆叠主干图:基于路径映射后的密度网格,团队设计了堆叠主干图。通过引入分割线消除遮挡与间隙,并采用最近邻插值填充空白区域,实现了多个时序密度分布沿主干的无损堆叠。该设计不仅完全保留了原始密度信息(支持逆向重建),而且平均节省了90%以上的屏幕空间。
研究团队在野生动物分布、气象监测、城市共享单车等多个真实数据集上开展了系统性评估,并与散点图、密度热力图以及StoryFlow、iStoryline等基线方法进行了对比。实验结果表明:
密度分布匹配:Strunkmap的匹配准确率达0.94,显著高于传统核密度热力图(0.78–0.84),平均完成时间仅21.53秒,约为后者的三分之一。
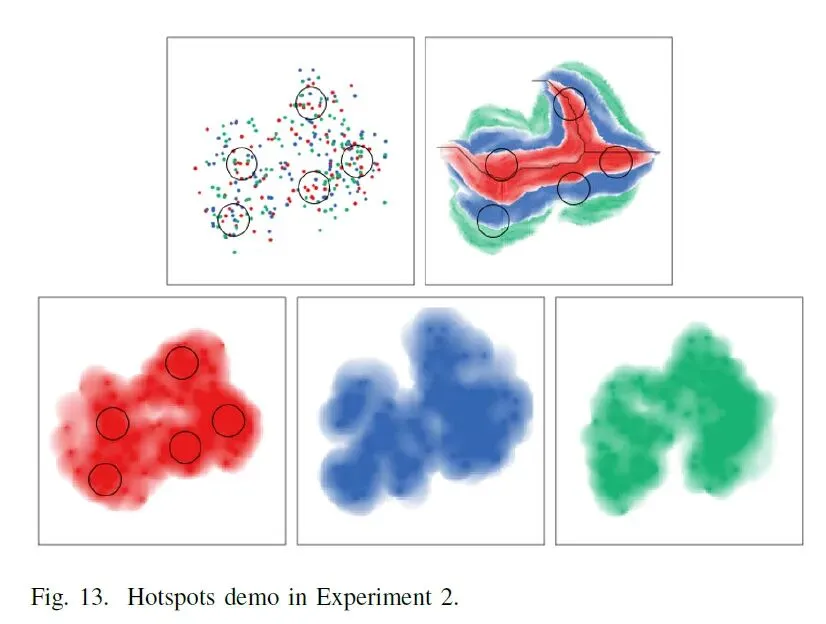
热点识别:Strunkmap准确率达0.84,优于热力图的0.78,且完成时间最短(70.84秒),而热力图因需在多个子图中定位热点耗时最长(81.25秒)。
趋势探索:Strunkmap准确率(0.75)与热力图(0.79)相当,但完成时间(139.45秒)比热力图(152.38秒)显著缩短,比散点图(174.73秒)更为高效。
消融实验:各向异性核密度估计、主干提取、主干-轮廓匹配三个组件均不可或缺,移除任一组件均导致准确率下降5–20个百分点,完成时间大幅增加。
用户调研(24名参与者)显示,Strunkmap在易理解性、有效性及实用性方面获得高分(平均得分3.54–4.08/5),多数参与者表示愿意在实际工作中采用该方法。案例研究进一步验证了Strunkmap在登革热疫情监测(2913例病例)、美洲狮种群活动(稀疏数据)以及上海市及周边地区1.36亿人口迁移(大规模数据)中的实用价值。
该研究首次将主干抽象与路径映射引入时空密度分布可视化领域,实现了多时序分布的无遮挡、无损、可逆展示,为智慧城市、公共卫生、生态保护等领域的时空数据分析提供了全新的可视化解决方案。团队后续将探索交互式高亮、主干平滑调节等增强功能,进一步提升复杂密度模式下的判读准确性。