 夜雨聆风
夜雨聆风





OpenClaw + Robot 项目专栏|这 3 个项目,正在把 OpenClaw 从“会调工具”推向“会接机器人”
点击下方卡片,关注【Xbotics具身智能实验室】公众号
更多具身干货,欢迎加入【Xbotics知识星球】(戳我)
👉具身智能学习资料汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-Guide
👉具身智能求职/实习信息汇总:https://github.com/Xbotics-Embodied-AI-club/Xbotics-Embodied-AI-Job
你想要的这里都有~~

如果这段时间你一直在看 OpenClaw 和机器人的结合,应该会发现一个变化:
大家已经不满足于“把 OpenClaw 接上一台机器人跑个 Demo”,而是开始认真补中间最难的那一段。
这段路大概有三层。
第一层,是怎么把 OpenClaw 这样的上层 Agent 稳稳接进 ROS2 和真实机器人系统。
第二层,是怎么让它不只是“能发指令”,而是真有一个可调用、可替换、可演化的身体。
第三层,是当系统里不止一台机器人、不止一个 Agent 时,谁来负责统一调度、安全约束和现场控制。
最近看到的三个项目,刚好对应这三层:AgenticROS、skillos_robot、RoboFang。它们做的事情不一样,但放在一起看,很能说明 OpenClaw × Robot 这条线正在往哪里长。
1)AgenticROS:先把桥接层做扎实
项目链接:
https://github.com/agenticros/agenticros
AgenticROS 最值得看的地方,是它没有把自己包装成“机器人大脑”,而是老老实实去做最基础、也最关键的一层:桥接层。
它要解决的问题很实际。OpenClaw 会调工具、会接消息、会跑流程,但这些能力怎么真正落到 ROS2 机器人上,往往不是一句“接一下接口”就能解决。消息怎么传,控制怎么发,节点怎么组织,上层 Agent 和 ROS2 生态之间怎么保持清晰边界,这些事情如果不先理顺,后面很多能力都只是演示。
AgenticROS 的价值,就在于它试图把这些原本散落在项目里的胶水逻辑收成一个相对独立的接口层。你可以把它理解成一座桥:
一头是 OpenClaw、Claude、Gemini 这类上层 Agent,一头是 ROS2 机器人和现场控制系统。桥搭稳了,上层的语言能力、任务能力、工具能力,才有机会真正进入机器人世界。
所以这类项目的重要性,不在“看起来炫不炫”,而在它决定了 OpenClaw 以后能不能从电脑里的 Agent,变成真实机器人系统的入口。很多团队容易忽视这一层,但真要落地,最后最先卡住的,往往就是这一层。
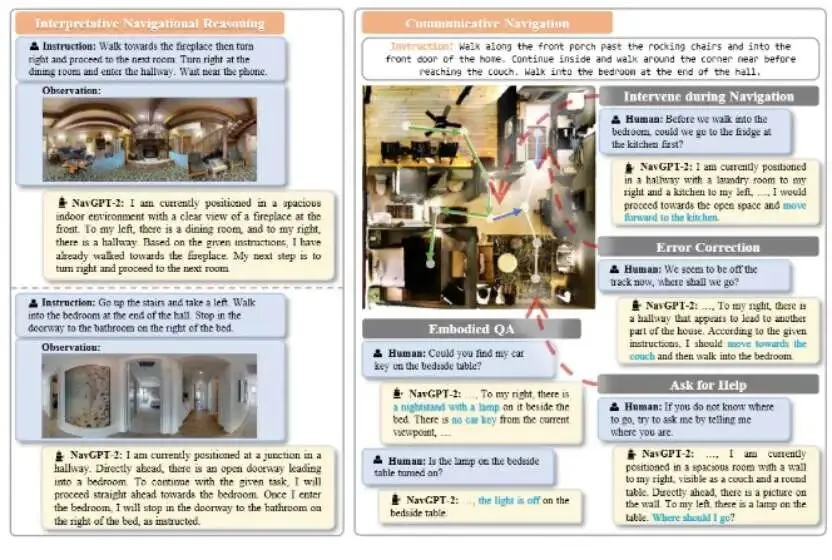
2)skillos_robot:给 OpenClaw 一个真的“身体”
项目链接:
https://github.com/EvolvingAgentsLabs/skillos_robot
如果说 AgenticROS 解决的是“怎么接进去”,那 skillos_robot 更像是在回答另一个问题:接进去之后,身体长什么样。
这个项目最有意思的一点,是它没有把机器人简单理解成“接几个底层控制接口”。它试图做的是一种更高层的身体抽象。上游系统发出来的,不再是零散的底层控制命令,而是像 robot.navigate 这样的能力调用;而 skillos_robot 负责把这些高层意图翻译成内部的感知、规划和执行。
这个思路很重要。
因为 OpenClaw 真要进入机器人世界,不能永远停留在“上层发一句话、底层硬翻成动作”这种很脆弱的方式。它需要中间有一层身体逻辑,来负责怎么感知、怎么移动、怎么停下、怎么把高层目标变成可以持续执行的闭环。
skillos_robot 这条线的价值,就在于它开始认真做这件事。它想把“身体”本身,做成一个能被调用、能被替换、也能接仿真的构件。这样一来,OpenClaw 对接的就不再只是某台机器人的 SDK,而是一种更稳定的身体接口。
说得直接一点,这类项目意味着 OpenClaw 不只是“能调机器人”,而是开始拥有真正意义上的 embodiment。它离“有身体的 Agent”这件事,又近了一步。
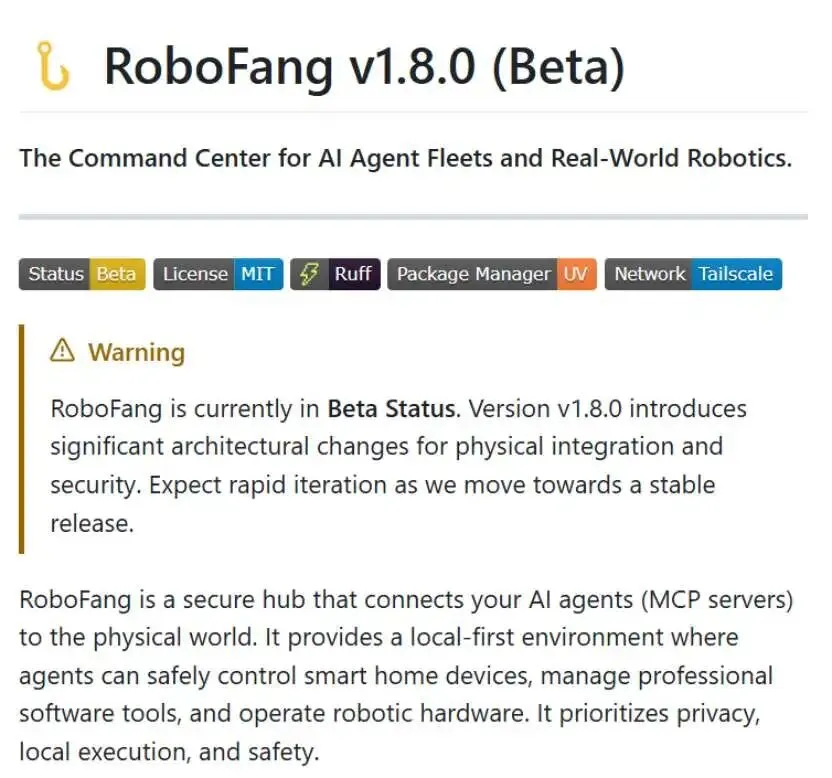
3)RoboFang:当系统不止一台机器人,谁来当中枢
项目链接:
https://github.com/sandraschi/robofang
到了 RoboFang,问题又变了。
它不只是关心“怎么把 OpenClaw 接上机器人”,也不只是关心“这个身体怎么设计”,而是进一步往上提了一层:如果未来系统里有多 Agent、多 MCP 服务、多个机器人底座,谁来统一调度?
RoboFang 更像一个中枢。它关心的是 agent fleet、physical integration 和 security。也就是说,它开始把机器人系统当成一个需要被整体管理的现场系统,而不是一个“单个机器人 + 单个 Agent”的小实验。
这条路线为什么值得看?因为真实世界里的问题,往往不是“机器人能不能动”,而是“多东西同时在动时,系统会不会乱”。权限怎么管,安全怎么兜底,不同机器人怎么接入,执行边界怎么划,异常状态怎么收,这些问题平时在 Demo 里不显眼,但一旦系统开始变复杂,马上就会变成主问题。
RoboFang 的意义就在这里。
它让 OpenClaw × Robot 这条线,开始从单点接入,转向系统编排。它未必是现在最成熟的产品形态,但很适合当一个观察窗口:看 OpenClaw 生态是不是正在从“会调用工具”,往“会管理一组真实世界执行体”继续走。
写在最后
把这三个项目放在一起,其实就能看出一条很清楚的路线。
AgenticROS 补的是桥接层,让 OpenClaw 真能进 ROS2。
skillos_robot 补的是身体层,让 OpenClaw 不只是发命令,而是真的开始“长身体”。
RoboFang 补的是中枢层,开始处理多 Agent、多机器人、多服务并存时的调度和安全问题。
这比“又多了几个机器人 Demo”更值得关注。因为一条方向真正开始成熟,不是因为演示变多了,而是因为它开始出现分层,开始有人分别去补接口、身体和中枢这三种能力。
OpenClaw × Robot 现在就在这个阶段。接下来更值得看的,不是谁的演示最花哨,而是谁能把这三层真正接起来,做出一个既能接入真实机器人、又能长期运行的系统。
-END-
Ask Me Anything|提问箱
❝
对文章有疑惑,或想聊更深?欢迎把你的问题丢给我们:技术方案、实操踩坑、课程与资料、项目合作、职业发展,都可以问。
怎么问:在评论区留言,或私信公众号
我们会做什么:每周集中整理高质量问题并公开回复,重点问题邀请作者或嘉宾深度解答;典型问题会加入知识库并持续更新。
提问小提示:尽量说明「你的目标—当前做法—期望产出」,附上必要信息(硬件/软件版本、数据规模等),能更快获得有用答案。
一起把问题变成知识,推动社区进步 🚀
