夜雨聆风
夜雨聆风最近OpenClaw很火,对很多做机器人、做无人系统的人来说,它最吸引人的地方,不只是“又来了一个新工具”,而是它让一个原本听起来还有点远的问题,开始变得具体起来:AI 不只是回答问题,而是直接执行任务。
那么当OpenClaw进入无人机领域,它到底能做什么?
带着这个问题,我们最近做了一次很直接的尝试:用OpenClaw去学习和控制无人机相关流程。
这次探索的重点是想进一步验证:当大模型能力开始进入无人机系统后,它究竟会怎样改变无人机的控制方式,以及未来的开发模式。
我们主要围绕这个方向在探索两件事:
尝试用OpenClaw配合大模型,智能控制无人机。
思考如何借助OpenClaw,提高无人机的开发效率。
01
让OpenClaw学会“操作地面站”
站在产品落地的角度看,我们认为OpenClaw控制无人机,首先有一种非常现实的路径:直接控制无人机地面站。
为什么我们会先从这条路切入?因为对于大多数无人机系统来说,地面站本身就已经承载了完整的任务链路:设备连接、状态显示、前方视频回传、参数配置、任务下发、起飞前检查、飞行监控等等。换句话说,人怎么通过电脑或App控制无人机,AI 理论上也可以沿着同样的交互逻辑去学习。
但这里有一个很关键的前提:OpenClaw不是一上来就会操作地面站的。
它需要被一步一步教会。比如怎么登录我们的Web地面站?怎么连接飞机,起飞前需要检查哪些状态,检查到什么程度才可以执行下一步,异常时应该停在哪一步。这些都不是“自动会”的,而是需要工程师把规则、流程和判定条件教给它,再让它在交互中不断记住。在这个过程中,它会基于实时界面信息做分析,再去执行相应的点击、选择和操作。
这是我们目前已实现并完成完整演示验证的方案,其核心逻辑是让OpenClaw模拟人类操作习惯,通过操控无人机地面站,间接实现对无人机的自主控制。
这条路最有价值的地方,不是“替代飞手”,而是说明了一件事:AI正在从“理解文字”,走向“理解界面”,再进一步走向“理解真实世界中的任务流程”。
这对无人机行业意味着什么?
意味着未来很多原本依赖人工重复操作的软件流程,都有机会被重新定义。
这一场景不禁让我们联想到凯文·凯利在《失控》中描述的人工生命实验:汤姆·雷的 Tierra 实验。该实验中,研究人员仅在系统中放入一段80字节的“亚当”程序,该程序具备自我复制、10% 随机变异及死亡机制,最终演化出远超人类手写最优解的精简代码,有力证明了代码可像生命一样自主繁殖、变异、竞争与进化。作为程序员出身的我,当年看到这一描述时充满质疑,而如今OpenClaw与大模型的深度融合,让AI能够理解复杂操作逻辑、自主完成无人机操控,这一现实早已超越了当年的想象,深刻印证了技术演化的无限可能。
02
让OpenClaw直接面向无人机接口
除了地面站路径,我们也在思考第二种方式:
把OpenClaw放到更靠近机体控制链路的位置,直接对接无人机API、传感器数据和任务状态。
这条路的想象空间更大。如果能够真正打通,那么AI不只是“会点按钮”,而是可以直接基于飞控接口、传感器输入和系统状态,参与更底层的任务执行与控制决策。
但这条路,难度也明显更高。
至少在现阶段,机载算力、系统耦合、安全边界、实时性要求等都是必须正面解决的问题。尤其是对无人机这样的系统来说,任何控制链路的变化,都不能只看“能不能跑起来”,更要看“是否稳定、是否可验证、是否足够安全”。
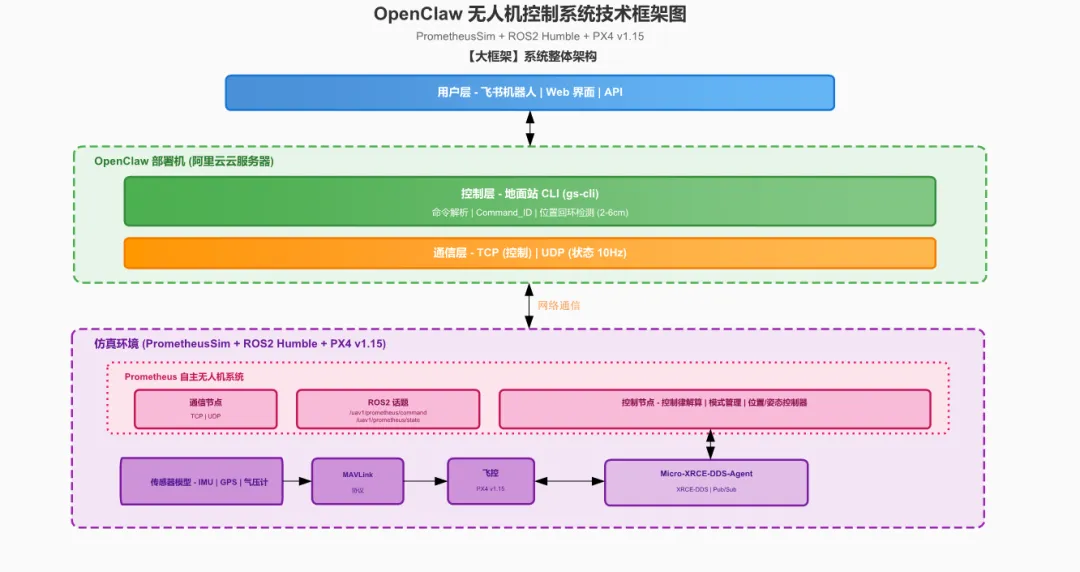
目前,这一方案已经在仿真环境中完成初步部署与验证。后续,我们计划继续围绕接口适配、任务流程封装和系统协同展开完善,并进一步将相关能力封装为ProSim内可调用的OpenClaw技能包。通过这种方式,用户可以在仿真环境中更便捷地体验和验证 OpenClaw控制无人机的完整流程,也为后续从仿真走向真实系统打下基础。
用OpenClaw控制仿真无人机飞一个五角星:
所以在我们现阶段的判断里,更现实的方式不是二选一,而是协同。
一边是地面站侧,负责交互、监控、流程执行和更高层的任务理解;另一边是机体侧,逐步开放接口,让OpenClaw能够读懂更多系统状态、参与更多开发流程。
这两部分结合起来,才更可能成为未来无人机与机器人系统里真正可落地的AI架构。
03
研发效率
说到底,我们关注OpenClaw,不是为了追一个概念。而是因为它让我们看到了一种新的可能:
未来的无人机开发,不一定只是“人写代码—人调参数—人点地面站—人反复试飞”这一条路径。AI 可以成为流程的一部分,成为交互的一部分,也可能成为研发提效的一部分。
它未必会立刻替代现有的软件和硬件逻辑,但它很可能会推动整个开发架构发生变化。尤其对于无人机等机器人来说,未来的系统设计,可能不再只是单纯围绕“功能模块”展开,而是要重新思考:
如何让AI更自然地接入控制链路?如何让交互逻辑更适合AI学习?如何让仿真、地面站、接口层、任务层形成一套新的协同方式?
这些,才是我们更关心的问题。
04
写在最后
这次的尝试,对我们来说更像一个开始。我们已经看到,AI不再只是回答问题,它正在逐步进入软件界面、进入流程执行、进入真实系统。而无人机,恰恰是最值得被重新思考的一类应用载体。
如何让无人机研发更高效,始终是阿木实验室一直在思考的问题。关注我们,持续看见无人机研发的更多可能。
如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
bbs.amovlab.com
有工程师亲自解答
10000+无人机开发者和你共同进步!

求点赞
求分享
求喜欢