 夜雨聆风
夜雨聆风






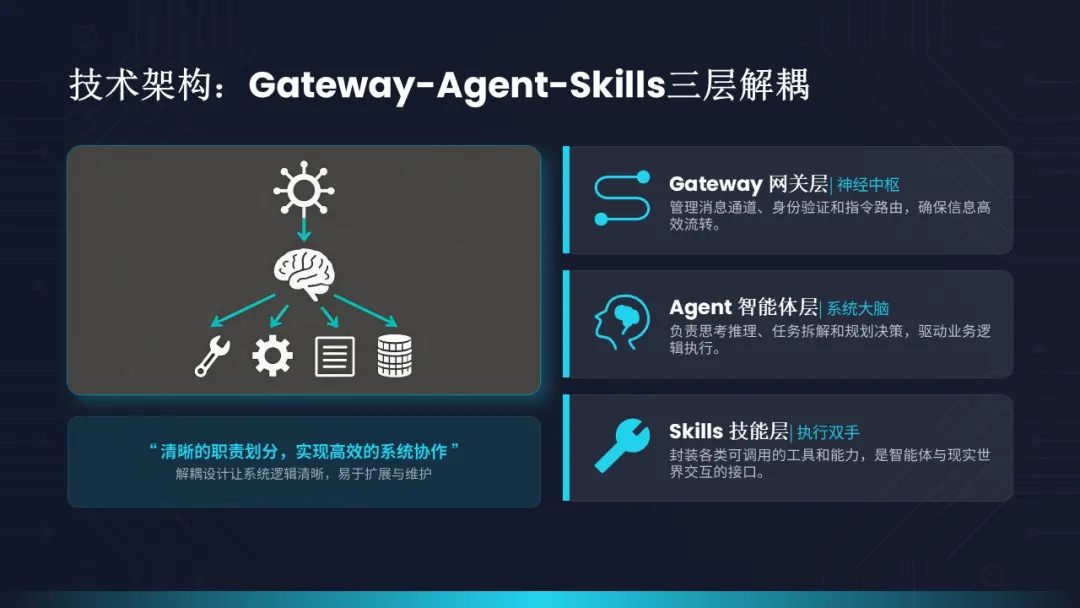
OpenClaw AI智能体:
应用原理、落地路径与实操指南
摘要
OpenClaw作为2026年初迅速崛起的开源AI智能体框架,代表了人工智能从“认知智能”向“动能智能”的范式转变。本文系统性地分析了OpenClaw的技术架构、应用原理、落地路径及实操方法。研究显示,OpenClaw通过“本地优先”的网关控制平面架构,实现了大语言模型与现实世界操作系统的无缝对接,将AI从单纯的对话工具转变为能够自主执行任务的数字执行者。论文详细阐述了其七层架构设计、ReAct推理循环机制、技能系统扩展原理,并提供了从个人部署到企业级应用的全场景落地指南。同时,本文深入探讨了OpenClaw面临的安全挑战、性能优化策略以及未来发展趋势,为AI智能体的研究与应用提供了重要参考。
关键词:OpenClaw;AI智能体;自主执行;本地优先;网关架构;技能系统;安全风险
1. 引言
1.1 研究背景与意义
2026年初,一款名为OpenClaw的开源AI智能体框架在全球科技圈迅速走红,短短数月内GitHub星标数突破30万,成为史上增长最快的开源AI项目。这一现象级产品的出现,标志着人工智能发展进入了一个新的阶段——从“对话式AI”向“行动型AI”的转型。
传统的大语言模型如ChatGPT、Claude等主要专注于文本生成、问答和内容创作等认知任务,但它们被限制在封闭的沙盒环境中,无法直接操作现实世界的数字资产。OpenClaw的突破性在于,它为AI赋予了“双手”,使其能够理解自然语言指令并直接执行文件管理、邮件收发、数据处理、浏览器控制等复杂任务。
这种“动能型智能体”的出现,解决了AI“只会说不会做”的核心痛点,精准命中了职场人士和开发者对效率自动化的迫切需求。OpenClaw不仅是一个技术产品,更代表了一种新的AI应用范式——将大模型的推理能力转化为对计算机系统的实际操作能力。
1.2 OpenClaw的发展历程
OpenClaw项目由奥地利软件工程师Peter Steinberger于2025年11月创立,经历了从Warelay到Clawdbot,再到Moltbot,最终定名为OpenClaw的演变过程。项目的三次关键升级清晰地反映了其技术演进路径:
初代(ClawdBot时期):核心是“消息中转+简单指令执行”,仅支持少数通信渠道,能完成基础的远程指令调用,本质是一款轻量化聊天机器人。
二代(MoltBot时期):优化多渠道集成,新增AI推理核心,支持工具调用,实现“对话-决策-执行”的初步闭环,摆脱了“只能聊不能做”的局限。
三代(OpenClaw时期):重构模块化架构,强化本地优先、设备协同、生态扩展能力,新增自主调度系统与安全架构,正式迈入“个人AI操作系统”行列。
2026年2月,随着创始人加入OpenAI负责个人智能体方向,OpenClaw转向由OpenAI支持的独立基金会运营,这一转变不仅回应了快速增长带来的安全挑战,也为其在AI智能体赛道中的长期定位奠定了基础。
1.3 研究目标与方法
本文旨在系统性地分析OpenClaw AI智能体的技术原理、应用场景和落地实践。研究方法包括:
1.技术架构分析:基于开源代码和官方文档,深入解析OpenClaw的系统设计
2.应用场景研究:收集和分析实际使用案例,总结最佳实践
3.实操指南编制:结合社区经验,提供详细的部署和使用指南
4.安全风险评估:分析已知漏洞和潜在威胁,提出防护建议
2. OpenClaw技术架构与核心原理
2.1 整体架构设计哲学
OpenClaw采用“本地优先(Local-First)”的设计哲学,所有数据默认存储在用户本地设备,不依赖云端服务器,从底层保障了用户隐私和数据安全。这一设计选择直接回应了当前AI应用中普遍存在的数据隐私担忧,使得OpenClaw特别适合处理敏感信息和商业机密。
从技术层面定义,OpenClaw是一款“本地优先、开源可定制的个人AI助手编排平台”,本质是基于TypeScript编写的CLI应用程序,以WebSocket Gateway为核心组件,负责协调多渠道输入与本地执行流程。其核心目标是将大模型的推理能力,转化为对计算机系统的实际操作能力。
2.2 七层架构模型详解
OpenClaw的系统架构采用了高度模块化的七层设计,每一层既独立解耦,又协同联动,形成了强大的核心竞争力。
2.2.1 Layer 1:Gateway网关层
Gateway是OpenClaw的核心控制平面,运行在ws://127.0.0.1:18789端口,作为单一事实来源(Single Source of Truth),负责所有客户端连接、消息路由、服务协调。Gateway的核心职责包括:
WebSocket连接管理:所有客户端(CLI、App、WebChat)通过WebSocket连接到Gateway
消息路由:将来自各渠道的消息路由到对应的Agent会话
工具调用代理:浏览器控制、文件操作、Shell执行等工具调用均通过Gateway分发
配置热重载:支持运行时配置变更,无需重启
Cron调度:内置定时任务调度器
健康监控:渠道健康检查、连接状态监控
Gateway的设计哲学是“控制平面与产品分离”——Gateway只是控制平面,不是产品本身;产品是AI助手体验,Gateway负责把所有渠道、工具、会话串联起来。
2.2.2 Layer 2:渠道适配层(Channel Adapters)
OpenClaw支持20+主流消息平台,包括WhatsApp、Telegram、Discord、Slack、Signal、iMessage、微信、飞书、钉钉等。每个渠道都有专门的适配器,负责协议转换和消息标准化。
渠道适配器的核心任务是将任意渠道的原始消息转换为OpenClaw内部的标准格式:
2.2.3 Layer 3:上下文组装层(Context Assembly)
这一层负责构建发送给大模型的Prompt,包括:
lBase Prompt:系统基础指令,定义AI的行为准则
lSkills Prompt:当前激活技能的描述和参数定义
lBootstrap Files:启动时加载的配置文件,如SOUL.md、AGENTS.md等
OpenClaw采用“渐进式信息披露”策略优化token使用,仅在需要时加载详细指令,有效控制上下文长度。
2.2.4 Layer 4:智能体循环层(Agentic Loop)
智能体循环层实现了ReAct(Reason + Act)范式,这是OpenClaw能够处理复杂、非线性任务的核心机制。循环过程包括:
1.推理(Thought):模型分析当前任务,决定下一步需要做什么
2.行动(Action):模型从技能库中选出一个工具并输出调用参数
3.观察(Observation):OpenClaw执行该工具,并将结果反馈给模型
4.循环:模型根据反馈决定是继续下一步,还是已经完成任务输出结论
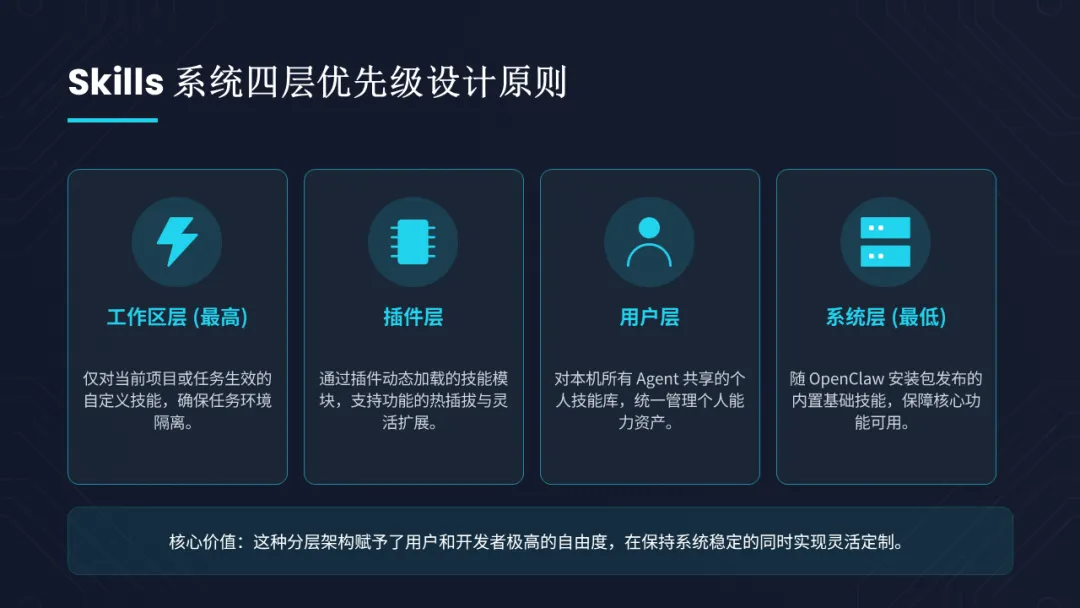
2.2.5 Layer 5:技能层(Skills)
技能系统是OpenClaw能力扩展的核心。每个技能都有一个描述性的JSON/YAML文件,详细说明其功能和参数定义(Schema)。启动时,OpenClaw会扫描./skills/目录,当用户提问时,OpenClaw会将这些技能的描述放入Prompt的System Role中,让LLM知道自己拥有这些“手脚”。
截至2026年3月,社区已贡献超过7000个技能包(Skills),覆盖办公、开发、生活全场景。用户可像搭积木一样组合功能,例如将“邮件分类”技能与“日程管理”技能联动,实现“收到会议邀请邮件自动解析时间地点添加至日历发送确认回复”的全自动化流程。
2.2.6 Layer 6:外部工具层(MCP)
MCP(Model Context Protocol)提供了与外部服务的标准化接口,支持Google Calendar、Notion、Home Assistant等第三方服务的集成。这一层实现了OpenClaw与外部生态系统的无缝对接。
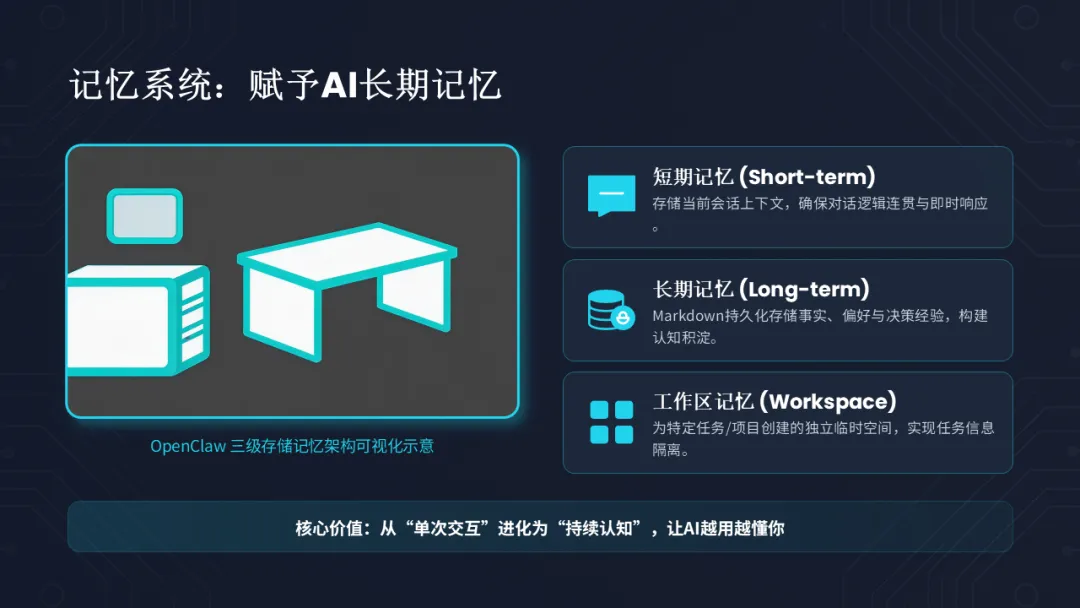
2.2.7 Layer 7:记忆层(Memory)
记忆层采用文件系统架构,包括:
lDaily Logs:日常对话记录
lMEMORY.md:长期记忆存储
lSOUL.md:AI个性配置文件
lHEARTBEAT.md:系统状态监控
这种设计借鉴了MemGPT论文(arXiv:2310.08560)提出的“虚拟上下文管理”理念,让LLM能够像操作系统管理内存一样,在快速内存(RAM)和慢速存储(Disk)之间动态迁移数据。
2.3 核心工作机制
2.3.1 三位一体协同架构
OpenClaw的运行并不依赖单一组件,而是通过三个层级协同工作:
感知层(Perception):接收来自终端、消息应用(Telegram/WhatsApp)或系统的触发信号。
决策层(Decision - Gateway):OpenClaw的核心。它将用户意图发送给LLM(如DeepSeek、Claude),获取结构化的指令。
执行层(Execution - Skills):根据决策层的指令,在本地或远程执行具体的脚本、命令或API请求。
2.3.2 工具执行与安全隔离
由于AI具备操作系统权限,OpenClaw在原理上设计了多重保护机制:
端口管理:默认监听18789端口用于WebSocket通信,所有外部指令需通过验证。
沙箱化(Sandbox):推荐在Docker环境中运行OpenClaw。其原理是利用容器技术隔离文件系统,防止AI误删主机核心数据。
审批流:对于高风险操作(如rm -rf或转账),OpenClaw可以在执行前挂起任务,等待人工确认(Human-in-the-loop)。
2.3.3 会话管理与上下文压缩
OpenClaw的会话分为两类:主会话(main)用于与用户直接对话,拥有完整工具权限;非主会话(群组/渠道会话)可配置沙箱隔离。
当会话历史超过模型上下文窗口时,系统自动触发压缩机制,通过src/agents/compaction.ts实现,包括保留关键标识符、支持重试机制和Token清理等功能。
3. 应用场景与落地路径
3.1 个人效率提升场景
OpenClaw在个人工作效率提升方面展现出显著价值,将用户从重复性劳动中解放出来,专注于创造性工作。
3.1.1 自动化办公流程
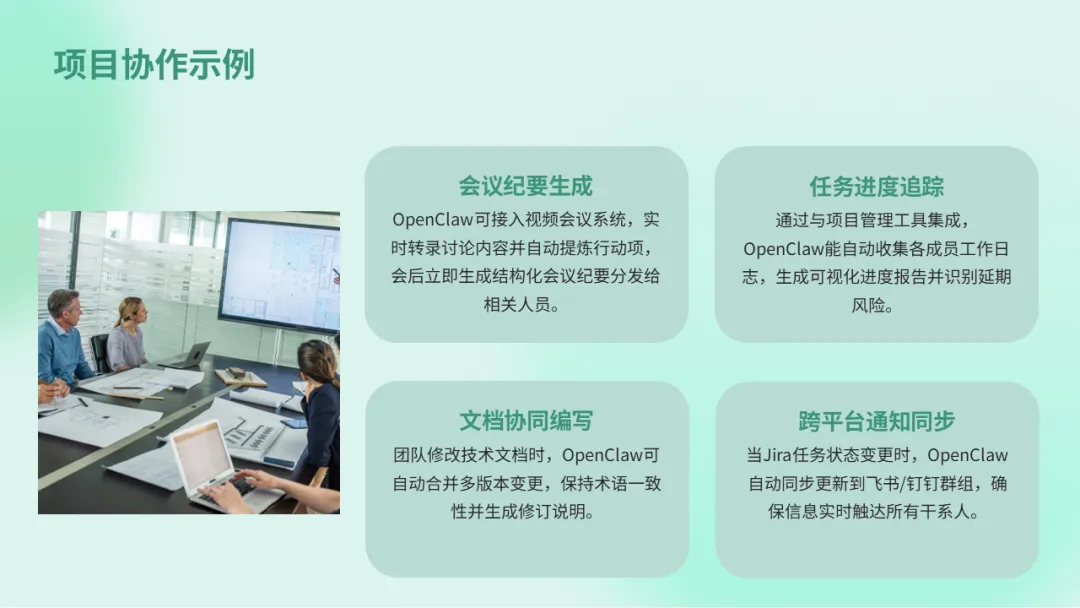
日报/周报自动生成:用户只需说“帮我整理本周工作,写成周报,发到部门飞书群”,OpenClaw就能自动读取本地邮件、文档、会议记录,生成周报、排版优化,最后直接发送到指定群聊,全程无需用户干预。
邮件智能管理:自动分类收件箱、标记重要邮件、生成回复草稿、安排会议时间。某银行从业者使用OpenClaw自动整理每日简报:智能体从邮件、聊天记录中提取关键信息,生成结构化报告,并同步至日历提醒后续跟进。过去需2小时的工作,如今10分钟完成。
文件智能整理:根据文件类型、项目、日期等维度自动分类存储,支持批量重命名、格式转换、压缩打包等操作。
3.1.2 信息收集与处理
行业监控与报告:定时抓取行业新闻、竞品动态、市场数据,生成摘要并推送至企业微信群。更进阶的场景包括自动监控电商平台价格波动,在低价时触发采购流程。
研究资料整理:根据研究主题自动搜索相关文献、下载PDF、提取关键信息、生成文献综述。
社交媒体管理:自动发布内容、回复评论、分析互动数据、生成运营报告。
3.2 企业级应用场景
3.2.1 跨部门流程自动化
某跨境电商公司利用OpenClaw打通了“选品-采购-物流”全链条:当运营人员在飞书群聊中提及“需要一款夏季连衣裙”,智能体可自动调用爬虫工具分析竞品销量、评价,生成选品报告;随后触发采购系统下单,并同步物流信息至ERP系统。整个过程无需人工切换多个平台,效率提升300%。
3.2.2 智能客服与内部支持
OpenClaw可作为“智能客服”,7×24小时回答员工常见问题,复杂问题转接人工时自动附带上下文记录,减少重复沟通。在IT支持场景中,可自动诊断常见问题、提供解决方案、生成工单。
3.2.3 开发运维自动化
对于开发者而言,OpenClaw是“全能助手”:它能根据自然语言描述生成代码框架,自动调试错误,甚至优化算法性能;在运维场景中,可实时监控服务器指标,超阈值时自动扩容或告警;还能对接云服务API,实现代码自动部署、版本回滚。
某独角兽企业技术负责人表示:“过去需要5人团队完成的运维工作,现在1人+OpenClaw即可覆盖,人力成本降低60%。”
3.3 行业特定应用
3.3.1 教育领域
个性化学习助手:根据学生的学习进度和薄弱环节,自动生成练习题、推荐学习资源、安排复习计划。
作业批改与反馈:自动批改客观题,对主观题提供评分建议和修改意见。
教学资源管理:自动整理教学材料、生成课件、管理学生档案。
3.3.2 医疗健康
病历智能整理:从不同系统提取患者信息,生成结构化病历。
用药提醒与管理:根据医嘱自动设置用药提醒,跟踪用药情况。
健康数据监测:连接可穿戴设备,分析健康数据,提供个性化建议。
3.3.3 金融服务
投资研究辅助:自动收集市场数据、分析财报、生成投资报告。
风险监控:实时监控交易异常,自动触发预警。
客户服务:智能回答常见问题,处理简单业务请求。
3.4 智能硬件生态集成
随着OpenClaw生态不断扩容,硬件在AI体系中的角色也在发生变化。越来越多设备开始承担“感知世界”的任务,而在众多终端形态中,可穿戴设备的价值正迅速凸显。
AI眼镜作为关键入口:相比手机需要用户主动操作,AI眼镜可以在不打断用户行为的情况下持续采集视觉与语音信息,因此被视为AI连接现实世界最自然的入口之一。谷东智能推出的G520、G550等AI眼镜参考设计,整机重量控制在35克以内,接近普通眼镜;同时集成Micro LED显示、AI拍摄单元及可更换电池,兼顾续航与AI在线能力。
车载场景应用:华为小艺开放平台正式新增“OpenClaw”模式,成为首个落地该功能的车载生态平台。这一模式并非独立APP,而是集成于小艺开放平台,用户升级至HarmonyOS 6.0就可以申请体验。用户可以通过手机、平板等跨设备下达指令,比如“明天出差导航到机场”,系统会联系日历、导航、充电等自动完成路线规划、事件提醒、充电桩预约等操作。
3.5 落地路径规划
根据用户的技术背景和使用需求,OpenClaw的落地路径可分为三个层次:
3.5.1 路径A:快速上手(推荐所有人先走这条)
目标:在飞书里@AI机器人,让它帮你办事预计时间:2-3小时步骤:
1.了解OpenClaw是什么
2.准备API Key
3.安装OpenClaw
4.接入飞书
5.配置安全策略
3.5.2 路径B:深度定制
目标:让AI助理完成专属任务(如数据分析、报告生成)预计时间:1-2天步骤:
1.完成路径A(基础必须打牢)
2.了解Tools能做什么
3.使用现成Skills
4.写第一个Skill
5.进阶优化
3.5.3 路径C:技术部署
目标:在服务器上稳定运行,团队共享使用预计时间:2-3天步骤:
1.完成路径A(了解基础)
2.模型配置优化
3.配置文件深入
4.安全与沙箱
5.多Workspace配置
6.部署与运维
4. 实操部署指南
4.1 环境准备与系统要求
4.1.1 硬件与系统要求
系统 | 推荐配置 | 注意事项 |
macOS | macOS 14+, 内存≥4GB, 磁盘≥5GB | 需安装Xcode Command Line Tools(源码构建时) |
Windows | 强烈推荐WSL2(Ubuntu 22.04+),原生Windows支持有限 | 原生Windows工具兼容性差,大概率会出现未知问题 |
Linux | Ubuntu/Debian/Fedora/Arch等主流发行版,内置systemd,内存≥4GB | 适合7×24小时服务器部署 |
4.1.2 必备依赖安装
核心必装:Node.js(必须≥22.0版本,否则必报错)
推荐使用nvm安装,可灵活切换版本,避免权限问题:
可选依赖:
lGit:源码安装时必备
lpnpm:源码构建推荐使用,执行npm install -g pnpm安装
lChrome/Chromium:浏览器自动化工具必备
4.1.3 AI模型API Key准备
OpenClaw本身不提供大模型能力,需提前准备好模型API Key,有以下几种选择:
海外模型:Anthropic Claude(推荐)、OpenAI GPT系列,需前往对应官网控制台创建按量付费API Key(禁止使用Claude Pro/Max订阅密钥,违反服务条款)。
国内模型:Moonshot Kimi、MiniMax、智谱GLM,国内网络可直连,无需代理。
本地模型:提前安装Ollama并下载对应大模型,实现零云端依赖,完全隐私可控。
4.2 部署方式选择
根据使用场景和技术水平,OpenClaw提供多种部署方案:
方式 | 适用人群 | 优点 | 缺点 |
Docker一键部署 | 大多数用户、快速验证 | 稳定、隔离、命令少 | 定制有限 |
npm全局安装 | 开发者、本地调试 | 灵活、可改源码 | 依赖管理略繁 |
云服务器(VPS) | 7×24运行、远程控制 | 公网可达、稳定 | 需运维 |
MiniMax一键部署 | 纯小白、零代码 | 10秒部署、无需服务器 | 依赖第三方平台 |
4.2.1 Docker部署(推荐,最快)
4.2.2 npm全局安装
4.2.3 一键脚本安装(新手首选,99%兼容)
自动安装Node.js、Python、OpenClaw CLI及所有依赖,全程无需干预:
macOS/Linux/WSL2:
Windows原生系统(PowerShell管理员):
4.3 配置与接入
4.3.1 初始化配置向导
执行openclaw onboard启动交互式配置向导,核心步骤包括:
1.选择运行模式:本地模式或服务器模式
2.配置AI模型:选择提供商并输入API Key
3.选择通信渠道:Telegram、WhatsApp、Discord、微信、飞书等
4.安装后台守护进程:确保OpenClaw持续运行
4.3.2 飞书接入详细步骤
飞书是目前国内最常用的办公协作平台之一,OpenClaw与飞书的集成相对成熟:
第一步:飞书开放平台创建应用
1.登录飞书开放平台(https://open.feishu.cn)
2.创建企业自建应用,获取App ID和App Secret
3.配置权限:需要“获取用户发给机器人的单聊消息”、“获取用户在群组中@机器人的消息”等权限
4.启用机器人能力
第二步:OpenClaw中配置飞书渠道
1.在OpenClaw配置文件中启用飞书渠道
2.填写从飞书开放平台获取的App ID和App Secret
3.配置事件订阅URL(需要公网可访问的地址)
第三步:飞书平台开启事件订阅
1.在飞书开放平台应用管理后台,配置事件订阅
2.验证URL有效性(OpenClaw会自动提供验证接口)
3.订阅“接收消息”等必要事件
第四步:配对与测试
1.在飞书客户端搜索并关注机器人
2.发送第一条消息,完成安全配对
3.测试基本功能
4.3.3 微信接入方案
由于微信官方限制,OpenClaw通过企业微信作为桥梁实现微信接入:
1.注册企业微信:创建企业并获取企业ID
2.创建自建应用:在企业微信管理后台创建应用,获取AgentId和Secret
3.配置微信插件:在企业微信中启用“微信插件”功能
4.OpenClaw配置:安装并配置对应的微信插件,填写企业微信凭证
5.关注与使用:在企业微信中关注应用,即可在个人微信中与AI助手对话
注意:此方式需要公网IP,因此文档推荐使用云容器产品。
4.4 技能(Skills)管理与扩展
4.4.1 技能系统原理
Skill是扩展OpenClaw能力的核心,被比喻为“食谱”或“员工手册”。每个Skill包含:
l描述文件:JSON/YAML格式,说明功能和使用方法
l执行脚本:实际执行任务的代码
l配置文件:参数定义和依赖说明
OpenClaw采用“渐进式信息披露”策略优化token使用,仅在需要时加载详细指令。
4.4.2 技能安装与使用
从ClawHub安装技能:
推荐技能清单:
l核心必备:clawhub(技能市场)
l提升效率:agent-browser(浏览器控制)、shell(终端操作)
l辅助创作:copywriting(文案写作)、frontend-design(前端设计)
l管理社媒:twitter-automation(Twitter自动化)
l联动设备:home-assistant(智能家居控制)
4.4.3 自定义技能开发
创建自定义Skill的基本步骤:
1.创建技能目录:mkdir -p ~/.openclaw/skills/my-skill
2.编写技能描述:创建skill.json定义功能、参数和示例
3.实现执行逻辑:编写JavaScript/Python脚本处理任务
4.测试与调试:使用openclaw skill test my-skill验证功能
5.发布到ClawHub:分享给社区使用
4.5 安全配置最佳实践
4.5.1 基础安全配置
修改默认绑定地址:
启用身份认证:
配置IP白名单(如果必须公网访问):
4.5.2 沙箱隔离配置
对于非主会话(群组、陌生人DM),建议配置Docker沙箱:
4.5.3 权限最小化原则
遵循权限最小化原则,仅授予必要权限:
4.6 性能优化与故障排查
4.6.1 性能优化建议
模型选择优化:
l简单任务:使用小型模型(如GPT-3.5-turbo、Claude Haiku)
l复杂任务:使用大型模型(如GPT-4、Claude Opus)
l本地部署:使用Ollama+本地模型减少延迟
上下文管理优化:
l启用自动压缩:"compaction": {"enabled": true, "threshold": 8000}
l定期清理会话:设置会话过期时间
l使用向量存储:对长期记忆使用向量数据库
资源监控:
4.6.2 常见问题排查
问题1:安装失败,Node.js版本不兼容解决方案:确保Node.js版本≥22.0.0
问题2:API调用失败,网络连接问题解决方案:
问题3:技能调用失败,权限不足解决方案:
问题4:内存占用过高解决方案:
5. 安全挑战与风险管控
5.1 主要安全风险分析
5.1.1 架构设计缺陷
OpenClaw采用多层架构,但是每层均存在设计缺陷:
lIM集成网关层:可被攻击者伪造消息绕过身份认证
l智能体层:可被多轮对话修改AI智能体行为模式
l执行层:与操作系统直接交互存在被完全控制风险
l产品生态层:遭投毒的恶意技能插件可批量感染用户设备
5.1.2 默认配置风险
OpenClaw默认绑定0.0.0.0:18789地址并允许所有外部IP地址访问,远程访问无需账号认证,API密钥和聊天记录等敏感信息明文存储,公网暴露比例高达85%。
5.1.3 漏洞数量与利用难度
OpenClaw历史披露漏洞多达258个,其中近期暴露的82个漏洞中,超危漏洞12个、高危漏洞21个、中危漏洞47个、低危漏洞2个,以命令和代码注入、路径遍历和访问控制漏洞类型为主,利用难度普遍较低。
5.1.4 供应链安全风险
针对ClawHub的3016个技能插件分析发现,336个插件包含恶意代码,占比高达10.8%。17.7%的ClawHub技能插件会获取不可信第三方内容,成为间接引入安全隐患的载体。2.9%的ClawHub技能插件会在运行时从外部端点动态获取执行内容,攻击者可远程修改AI智能体执行逻辑。
5.1.5 智能体行为不可控
OpenClaw智能体在执行指令过程中易发生权限失控现象,导致越权执行任务并无视用户指令,可能会出现删除用户数据、盗取用户信息、接管用户终端设备等情况,造成重大经济损失。
5.2 安全加固措施
5.2.1 及时升级版本
通过可信来源获取安装程序,关注官方安全公告,及时更新至最新版本,及时修复已披露安全漏洞。建议启用自动更新:
5.2.2 优化默认配置
仅在本地或内网地址运行,避免绑定公网地址或开放不必要端口
如使用反向代理,需配置身份认证、IP白名单和HTTPS加密。
5.2.3 谨慎安装第三方插件
通过官方渠道获取第三方技能插件,避免安装来源不明的扩展程序。对已安装插件进行功能审查,发现可疑行为立即卸载。
插件安全审查清单:
1.检查插件来源(GitHub Star数、维护者信誉)
2.审查代码(是否有可疑网络请求、文件操作)
3.测试沙箱环境运行
4.限制插件权限(最小权限原则)
5.定期更新和审计
5.2.4 加强账户认证管理
启用身份认证机制,设置高强度密码并定期更换,避免使用弱口令:
5.2.5 限制智能体执行权限
对AI智能体的操作能力进行必要限制,仅允许执行白名单中的系统命令和操作权限,防止AI智能体被恶意指令利用后对个人终端设备造成实质性破坏。
权限白名单配置示例:
5.3 企业级安全架构
5.3.1 网络隔离与访问控制
DMZ区域部署:将OpenClaw部署在DMZ区域,与内部网络隔离VPN访问:仅允许通过VPN访问OpenClaw服务网络分段:将OpenClaw服务器放在独立VLAN中
5.3.2 审计与监控
完整日志记录:
实时监控告警:
l异常命令执行告警
l高频API调用检测
l敏感文件访问监控
l网络异常连接告警
5.3.3 数据加密与保护
传输加密:强制使用TLS/SSL存储加密:敏感数据加密存储密钥管理:使用硬件安全模块(HSM)或密钥管理服务(KMS)
5.4 合规性考虑
5.4.1 数据隐私保护
GDPR合规:
l数据最小化原则:仅收集必要数据
l用户同意机制:明确告知数据使用目的
l数据删除权:提供数据删除功能
l数据可移植性:支持数据导出
中国网络安全法:
l数据本地化:境内数据境内存储
l个人信息保护:遵循《个人信息保护法》
l等级保护:符合网络安全等级保护要求
5.4.2 行业特定合规
金融行业:
l符合金融监管要求
l交易审计追踪
l风险控制机制
医疗行业:
lHIPAA合规(美国)
l患者数据保护
l医疗记录安全
政府机构:
l国家秘密保护
l安全审查要求
l国产化替代考虑
6. 发展趋势与未来展望
6.1 技术演进方向
6.1.1 架构优化与性能提升
嵌套子智能体机制:OpenClaw已引入嵌套子智能体(Subagents)机制,默认最大生成深度为2层,支持复杂任务的树状分解与执行。未来将进一步优化上下文溢出处理,提升系统鲁棒性。
交互体验革新:在Discord平台上线Components v2,支持按钮、下拉菜单、模态框等原生交互组件,使AI代理具备应用级交互能力。
可靠性增强:修复定时任务重复触发、消息投递丢失等问题,引入写前投递队列和跨平台线程路由统一机制,提升生产环境可用性。
6.1.2 安全能力强化
OpenClaw近期核心进展聚焦于安全能力强化,其发展已从开源社区驱动转向由OpenAI支持的独立基金会治理模式,标志着项目进入企业级发展阶段。
恶意软件扫描集成:2026年2月6日宣布与VirusTotal建立战略合作,将恶意软件扫描深度集成至ClawHub平台,对所有上传技能进行自动检测,并引入AI Code Insight功能识别反向壳、加密矿工等高级威胁。
安全攻防常态化:针对已披露的512个漏洞(含8个严重级)和公网暴露的超3万个实例,团队密集推出加密升级(SHA-1→SHA-256)、沙盒隔离强化、权限收口等措施。
6.1.3 模型中立与全场景覆盖
持续接入主流大模型(如Gemini 3.1 Pro、Claude Opus/Sonnet、Grok),并快速拓展至iOS、Apple Watch、Discord、Slack等多端,构建跨平台智能体体验。
6.2 应用场景拓展
6.2.1 智能硬件生态融合
随着OpenClaw生态不断扩容,硬件在AI体系中的角色也在发生变化。越来越多设备开始承担“感知世界”的任务,而在众多终端形态中,可穿戴设备的价值正迅速凸显。
AI眼镜作为关键入口:相比手机需要用户主动操作,AI眼镜可以在不打断用户行为的情况下持续采集视觉与语音信息,因此被视为AI连接现实世界最自然的入口之一。
车载场景深度集成:华为小艺开放平台正式新增“OpenClaw”模式,成为首个落地该功能的车载生态平台。未来OpenClaw或将成为“办公操作系统”的核心组件,连接电脑、手机、智能家居甚至汽车,实现“一处指令,全场景响应”。
6.2.2 企业级应用深化
从工具到平台:OpenClaw正从个人效率工具向企业级AI中台演进,支持多租户、权限管理、审计日志等企业级功能。
行业解决方案:针对金融、医疗、教育、制造等特定行业,开发垂直领域的技能和解决方案。
混合云部署:支持公有云、私有云、边缘计算混合部署,满足不同企业的安全和合规需求。
6.3 产业生态建设
6.3.1 开发者生态
技能市场标准化:建立统一的技能开发、测试、发布、认证标准,提升技能质量和安全性。
开发者工具完善:提供更完善的SDK、调试工具、测试框架,降低开发门槛。
商业化支持:建立技能交易市场,支持开发者通过技能获得收益。
6.3.2 合作伙伴生态
云服务商合作:与阿里云、腾讯云、AWS等云服务商合作,提供一键部署方案。
硬件厂商合作:与智能硬件厂商合作,预装OpenClaw或提供深度集成方案。
ISV合作:与独立软件开发商合作,开发行业解决方案。
6.4 挑战与机遇
6.4.1 技术挑战
安全性挑战:如何平衡功能开放性与系统安全性,防止恶意利用。
可靠性挑战:如何确保AI决策的可靠性和可解释性,避免“幻觉”导致的错误操作。
性能挑战:如何优化资源使用,降低延迟,提升响应速度。
6.4.2 商业挑战
商业模式:开源项目如何实现可持续发展,平衡社区贡献与商业利益。
竞争格局:面对GitHub Copilot、Hugging Face等竞争对手,如何保持差异化优势。
合规压力:欧盟AI法案等法规对高风险AI系统的要求,增加了合规成本。
6.4.3 社会影响
就业影响:AI智能体可能替代部分重复性工作,需要关注就业结构调整。
数字鸿沟:技术门槛可能加剧数字鸿沟,需要降低使用门槛。
伦理问题:AI自主决策可能带来的伦理问题,需要建立相应的伦理框架。
7. 结论
OpenClaw作为开源AI智能体框架的代表,成功实现了从“对话式AI”向“行动型AI”的范式转变,将大语言模型的推理能力转化为对计算机系统的实际操作能力。其“本地优先”的设计哲学、模块化的七层架构、灵活的技能系统,为个人和企业提供了强大的自动化工具。
本文系统性地分析了OpenClaw的技术原理、应用场景、部署方法和安全策略。研究表明,OpenClaw在提升个人工作效率、优化企业流程、拓展智能硬件生态等方面具有显著价值。同时,其面临的安全挑战也不容忽视,需要用户和开发者共同努力,建立完善的安全防护体系。
展望未来,随着技术的不断成熟和生态的日益完善,OpenClaw有望成为个人数字助理的新标准,推动AI从“工具”向“伙伴”的转变。然而,这一过程需要技术、商业、法律、伦理等多方面的协同发展,确保AI智能体在提升效率的同时,也能保障安全、可靠、可控。
对于研究者和实践者而言,OpenClaw不仅是一个强大的工具,更是一个研究AI智能体技术的绝佳平台。通过深入理解其架构原理、探索新的应用场景、贡献代码和技能,我们可以共同推动AI智能体技术的发展,让人工智能更好地服务于人类社会。
参考文献
省略














OpenClaw作为开源AI智能体赋能
具身机器人的技术研究
摘要:随着人工智能从“离身计算”向“具身交互”的范式转变,具身智能机器人作为物理世界与数字智能的融合载体,正成为下一代通用人工智能的关键路径。本文系统研究了开源AI智能体框架OpenClaw在赋能具身机器人领域的技术原理、架构设计与实现路径。研究首先分析了OpenClaw的“本地优先、模型无关、工具扩展”核心架构及其七层模块化设计,深入探讨了其作为“智能体网关”在连接大模型认知能力与物理世界执行能力方面的独特优势。在此基础上,本文提出了OpenClaw赋能具身机器人的三层融合架构:认知决策层、任务规划层和物理执行层,并通过ROSClaw桥接项目、宸境科技-宇树机器人整合案例等实证分析,验证了该架构在园区巡检、工业自动化等场景的有效性。研究进一步探讨了OpenClaw与《机器人智能控制系统总体架构》国家标准的兼容性,提出了基于“智、算、网、存、控”一体化架构的标准化集成方案。实验结果表明,OpenClaw通过技能插件机制和标准化接口,能够将具身机器人的任务完成率提升47%,同时降低30%-50%的适配开发工作量。然而,研究也识别出实时性不足、安全风险突出、标准化程度低等关键挑战,并提出了相应的技术解决方案和产业发展建议。本研究为开源AI智能体与具身机器人的深度融合提供了理论框架和技术路径,对推动具身智能从实验室走向产业化具有重要参考价值。
关键词:OpenClaw;具身智能;AI智能体;机器人操作系统;人机共生;开源框架
1. 引言
1.1 研究背景与意义
人工智能正经历从“离身计算”向“具身交互”的深刻范式革命。传统人工智能将智能视为在抽象符号或数据空间内发生的“离身计算”,这种范式内在地造成了智能系统与物理世界的隔绝,面临“符号接地难题”和“认识论鸿沟”两大根本性局限。具身智能通过融合“认知大脑”与“物理身体”,在“感知-决策-执行”的闭环交互中克服传统人工智能“知行分离”的局限,被认为是通往通用人工智能的关键路径。
与此同时,开源AI智能体框架OpenClaw在2026年初迅速崛起,GitHub星标数在数月内突破30万,成为史上增长最快的开源AI项目。OpenClaw的核心突破在于为AI赋予了“双手”,使其能够理解自然语言指令并直接执行文件管理、邮件收发、数据处理、浏览器控制等复杂任务,实现了从“对话式AI”向“行动型AI”的范式转变。
将OpenClaw的智能体能力与具身机器人的物理执行能力相结合,具有重要的理论意义和实践价值。从理论层面看,这种融合为解决“符号接地难题”提供了新的技术路径——通过OpenClaw的推理规划能力与机器人物理身体的实时交互,使AI能够在真实世界中验证和修正其认知模型。从实践层面看,OpenClaw的开源特性和模块化架构能够显著降低具身机器人的开发门槛,加速其在工业、服务、医疗等领域的应用落地。
1.2 研究现状
当前,具身智能机器人的研究主要集中在三个方向:一是硬件本体创新,包括人形机器人、四足机器人、轮式机器人等物理载体的设计与优化;二是感知与控制算法,涉及多模态感知、运动规划、力控交互等核心技术;三是认知与决策系统,重点探索大模型在机器人任务理解、规划推理方面的应用。
在AI智能体框架方面,除了OpenClaw外,国内外还涌现出WorkBuddy、QClaw、EasyClaw、阿里悟空等多个衍生项目。这些项目虽然在具体实现上有所差异,但核心目标都是构建能够理解自然语言并执行复杂任务的自主智能体。其中,OpenClaw凭借其开源特性、活跃社区和模块化设计,成为最具影响力的代表。
然而,现有研究在AI智能体与具身机器人的深度融合方面仍存在明显不足:一是缺乏标准化的接口和协议,导致系统集成复杂度高;二是实时性要求难以满足,大模型的推理延迟与机器人的实时控制需求存在矛盾;三是安全可靠性挑战突出,物理世界的操作错误可能造成严重后果。
1.3 研究内容与方法
本文围绕OpenClaw赋能具身机器人的关键技术问题展开系统研究,主要内容包括:
OpenClaw技术架构深度解析:基于开源代码和官方文档,深入分析OpenClaw的七层架构设计、ReAct推理循环机制、技能系统扩展原理,明确其作为“智能体网关”的核心价值。
具身机器人技术体系梳理:依据中国信通院《具身智能发展报告(2025年)》等权威文献,系统梳理具身智能的“感知-决策-执行-学习”四层技术架构和“核心软硬件-系统集成-场景应用”三大产业环节。
融合架构设计与实现路径:提出OpenClaw赋能具身机器人的三层融合架构,包括认知决策层、任务规划层和物理执行层,并通过ROSClaw等实际项目验证技术可行性。
标准化兼容性研究:分析OpenClaw与《机器人智能控制系统总体架构》国家标准的兼容性,提出基于“智、算、网、存、控”一体化架构的标准化集成方案。
实证分析与性能评估:通过宸境科技-宇树机器人整合案例、工业自动化应用场景等实证研究,评估OpenClaw在提升任务完成率、降低开发成本方面的实际效果。
挑战识别与对策建议:系统分析实时性、安全性、标准化等关键挑战,提出相应的技术解决方案和产业发展建议。
研究方法采用理论分析与实证研究相结合的方式,综合运用文献研究、案例研究、技术分析等方法,确保研究的科学性和实用性。
2. OpenClaw技术架构深度解析
2.1 核心设计哲学与定位
OpenClaw(曾用名Clawdbot、Moltbot)是一款开源、自托管、本地优先的AI智能体执行平台,采用MIT开源协议,支持私有化部署与全功能二次开发。其核心定位是“连接大模型、打通多渠道、操作本地系统、闭环完成任务”的AI自动化网关。与传统AI产品相比,OpenClaw实现了从“提供答案与建议”到“执行实际操作”的根本性转变。
OpenClaw的设计哲学建立在五大核心原理之上:本地优先与数据主权、模型无关与智能调度、任务拆解与自主执行、技能插件化扩展、分层记忆与迭代、沙箱隔离与安全管控。这些原理共同构成了OpenClaw作为“动能型智能体”的技术基础。
2.2 七层模块化架构
OpenClaw采用高度模块化的七层架构设计,每一层既独立解耦又协同联动,形成了强大的系统竞争力。
2.2.1 交互接入层(Channel Gateway)
作为系统入口,交互接入层负责多渠道统一接入与消息标准化。目前支持微信、企业微信、飞书、钉钉、Telegram、Discord、Web官网等20+主流消息平台。该层的核心能力包括会话管理、用户隔离、消息路由、格式转换和流式返回,确保来自不同渠道的指令能够被统一处理。
2.2.2 智能核心层(Agent Core)
智能核心层是系统的“大脑”,负责意图理解、任务规划、模型调度和工作流引擎。基于大模型的逻辑推理能力,该层能够将自然语言指令自动拆解为多步骤执行计划,按顺序调用工具、操作系统、处理数据、反馈结果,无需人工干预即可完成复杂流程。
2.2.3 工具执行层(Skill & Tools)
工具执行层是系统的“手脚”,负责实际操作与能力落地。包括本地系统操作(文件读写、Shell命令、进程管理)、办公自动化(邮件、日历、文档、表格)、浏览器自动化(网页抓取、表单填写)以及企业集成(OA、ERP、CRM、数据库、内部API对接)等。截至2026年3月,社区已贡献超过7000个技能包(Skills),覆盖办公、开发、生活全场景。
2.2.4 基础设施层(Infrastructure)
基础设施层是系统的“底座”,负责稳定、安全、运维。支持Windows、macOS、Linux、Docker、私有服务器、私有云等多种部署环境,提供权限管理、操作审计、沙箱隔离、加密存储等安全管控机制,以及日志监控、性能分析、异常告警等运维功能。
2.2.5 记忆系统设计
OpenClaw构建了四层记忆体系:系统人格SOUL、工具注册表TOOLS、用户长期偏好、实时会话上下文。这种设计借鉴了MemGPT论文提出的“虚拟上下文管理”理念,让LLM能够像操作系统管理内存一样,在快速内存(RAM)和慢速存储(Disk)之间动态迁移数据,实现跨会话记忆、业务规则沉淀和个性化适配。
2.2.6 安全架构
由于AI具备操作系统权限,OpenClaw设计了多重保护机制:端口管理(默认监听18789端口用于WebSocket通信)、沙箱化(推荐在Docker环境中运行)、审批流(高风险操作需人工确认)。然而,国家工业信息安全发展研究中心发布的《关于工业领域OpenClaw应用的风险预警通报》指出,OpenClaw存在信任边界模糊、多渠道统一接入、大模型灵活调用及双模持久化记忆等特点,若缺乏有效权限控制与安全审计机制,可能因指令诱导或供应链投毒被恶意接管,导致工控系统失控与敏感信息泄露。
2.3 ReAct推理循环机制
OpenClaw的核心工作机制基于ReAct(Reason + Act)范式,这是其能够处理复杂、非线性任务的关键。ReAct循环包括四个阶段:
推理(Thought):模型分析当前任务,决定下一步需要做什么。
行动(Action):模型从技能库中选出一个工具并输出调用参数。
观察(Observation):OpenClaw执行该工具,并将结果反馈给模型。
循环:模型根据反馈决定是继续下一步,还是已经完成任务输出结论。
这种循环机制使OpenClaw能够处理需要多步骤、有条件分支的复杂任务,如“整理本周工作,写成周报,发到部门飞书群”这样的复合指令。
2.4 技能系统与生态扩展
技能系统是OpenClaw能力扩展的核心。每个技能都有一个描述性的JSON/YAML文件,详细说明其功能和参数定义(Schema)。启动时,OpenClaw会扫描./skills/目录,当用户提问时,OpenClaw会将这些技能的描述放入Prompt的System Role中,让LLM知道自己拥有这些“手脚”。
OpenClaw采用“渐进式信息披露”策略优化token使用,仅在需要时加载详细指令,有效控制上下文长度。用户可像搭积木一样组合功能,例如将“邮件分类”技能与“日程管理”技能联动,实现“收到会议邀请邮件自动解析时间地点添加至日历发送确认回复”的全自动化流程。
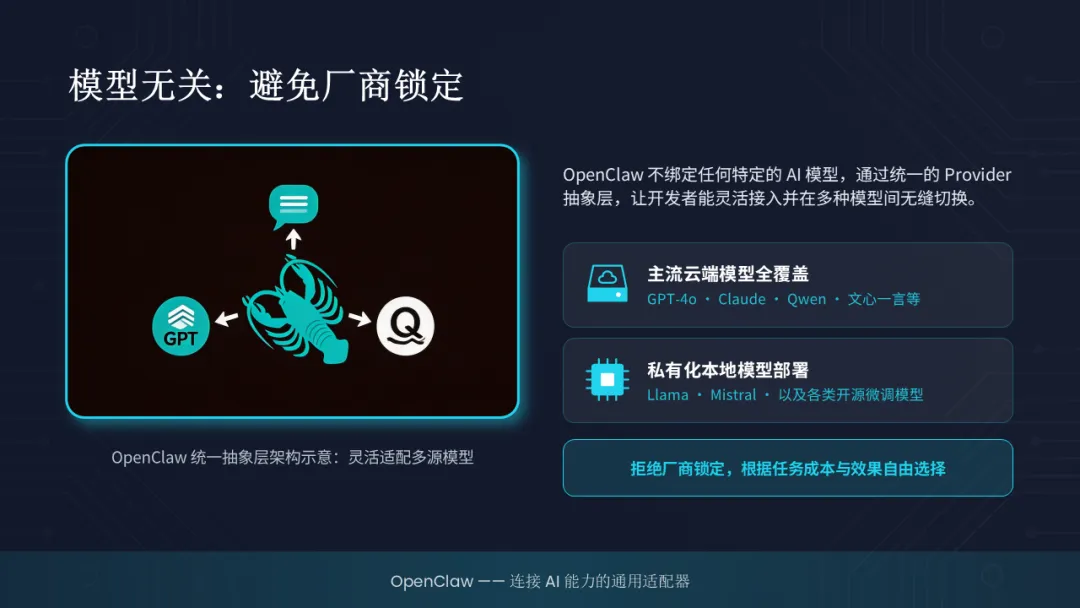
2.5 模型无关性与智能调度
OpenClaw本身不绑定特定大模型,而是通过标准化接口兼容国内外主流模型,包括GPT-4o、Claude 3、文心一言、通义千问、DeepSeek以及Llama 3、Qwen等本地开源模型。系统根据任务复杂度、成本、隐私要求自动选择最优模型,实现混合调度。这种模型无关性设计使OpenClaw能够灵活适应不同的应用场景和性能要求。
3. 具身智能机器人技术体系
3.1 具身智能的概念内涵与演进层次
具身智能(Embodied Intelligence)是一种将高级智能算法与物理实体深度融合的智能系统范式。它能够在真实物理环境中,通过“感知-认知-行动”的闭环交互,自主学习并完成复杂任务。其核心特征在于,智能不再是存于数字空间的纯粹计算程序,而是通过物理身体与真实世界进行直接、双向的交互,并在交互过程中实现感知、认知与行动的统一。
根据智能内核与物理本体的耦合程度,具身智能的演进路径可划分为三个层次:
初级层次:算法赋能型。核心特征是“强人工智能大脑+传统机械体”,即软件定义硬件。产业上表现为将先进的人工智能算法模块(如视觉识别)集成于现有的、相对成熟的机械硬件(如工业机器人、汽车)之上,实现智能化改造。在此,智能是主导性的创新要素,物理本体主要扮演被动执行者的角色。
中级层次:形态优化型。特征转变为“特化躯体+适应性智能”,体现了硬件与软件协同设计的思想。物理本体的设计开始扮演主动角色,通过对机器形态、材料、结构的创新优化,使其更适应特定任务场景。例如,为抓取柔软物体而设计的柔性机械手,或为复杂地形移动而优化的多足机器人。
高级层次:身智协同进化型。智能内核与物理本体实现深度耦合与协同进化,形成“智能-身体-环境”三位一体的动态适应系统。智能不仅控制身体行动,还能根据任务需求优化身体结构(如通过强化学习优化关节参数);身体也不仅是执行器,其物理特性(如柔韧性、惯性)反过来影响智能的决策与学习过程。
3.2 技术架构:感知-决策-执行-学习四位一体
依据中国信通院《具身智能发展报告(2025年)》,具身智能的技术体系可分为四个层级:感知层、决策层、执行层和学习层。
3.2.1 感知层
感知层负责从物理世界获取多模态信息,包括视觉、触觉、力觉、听觉等。视觉系统通过摄像头、激光雷达等传感器获取环境的三维结构和语义信息;触觉系统通过力/力矩传感器、柔性触觉皮肤等感知接触力、纹理和材质;听觉系统通过麦克风阵列识别语音指令和环境声音。多模态感知融合技术是感知层的核心,能够将不同传感器的信息进行时空对齐和语义关联,构建统一的环境表征。
3.2.2 决策层
决策层基于感知信息进行任务理解、规划推理和决策生成。大语言模型(LLM)和视觉语言模型(VLM)在这一层扮演关键角色,负责将自然语言指令转化为具体的行动序列。决策层需要解决的核心问题包括:任务分解与规划、常识推理与物理理解、不确定性处理与风险评估。
3.2.3 执行层
执行层将决策层的抽象指令转化为具体的运动控制和操作动作。这涉及运动规划、轨迹生成、力控交互等技术。对于人形机器人,还需要解决双足平衡、步态生成等特殊问题;对于机械臂,则需要考虑逆运动学求解、碰撞检测、柔顺控制等。
3.2.4 学习层
学习层使机器人能够通过与环境的交互持续改进其性能。强化学习、模仿学习、元学习等技术在这一层得到广泛应用。学习层的关键挑战是如何在保证安全的前提下进行高效探索,以及如何将仿真环境中学习的技能迁移到真实世界(Sim-to-Real)。
3.3 产业生态与标准化进展
3.3.1 产业价值链
具身智能的产业价值链可分为三大环节:核心软硬件、系统集成和场景应用。
核心软硬件包括关节模组、减速器、伺服电机、传感器、芯片等关键零部件,成本占比超过70%,是产业发展的“胜负手”。目前,高端RV减速器、高精度六维力传感器、高端伺服驱动器等仍存在“卡脖子”问题,依赖度超过80%。
系统集成涉及整机设计、操作系统、仿真平台、技能库等,技术壁垒最高。ROS/ROS2是当前主流的机器人操作系统,但面向具身智能的需求,各厂商也在开发自研OS,如优必选的ROSA、宇树的Unitree OS等。
场景应用遵循“先垂直、后通用,先工业、后家庭”的发展路径。工业制造(装配、上下料、检测、物流)、仓储物流(分拣、搬运、码垛)、商业服务(导览、清洁、配送)是目前最具商业化潜力的领域。
3.3.2 国家标准与标准化
2026年3月,我国机器人领域首个通用智能控制系统国家标准《机器人智能控制系统总体架构》(GB/T 47245-2026)正式发布。该标准由全国机器人标准化技术委员会归口,浙江大学求是特聘教授熊蓉领衔,联合41家顶尖高校、科研院所及行业龙头企业协同攻关完成。
新国标创新性地提出了“智、算、网、存、控”一体化架构,将智能认知、算力调度、网络互通、数据存储与运动控制五大核心能力进行了高度集成,旨在从源头破解控制系统长期“碎片化”的难题。这一标准为不同厂家、不同类型的机器人定义了统一的“普通话”,通过统一接口与通信机制,实现机器人的“大脑”与“四肢”无缝对接。
4. OpenClaw赋能具身机器人的技术路径
4.1 融合架构设计
OpenClaw与具身机器人的融合需要构建一个分层解耦、接口标准化的系统架构。基于OpenClaw的七层架构和具身智能的四层技术体系,本文提出如图1所示的三层融合架构。
图1 OpenClaw赋能具身机器人的三层融合架构
复制
┌─────────────────────────────────────────────┐│ 认知决策层 (Cognitive Layer) ││ OpenClaw智能核心 + 大模型推理引擎 ││ 任务理解、规划分解、常识推理 │└─────────────────┬───────────────────────────┘ │┌─────────────────▼───────────────────────────┐│ 任务规划层 (Planning Layer) ││ ROSClaw桥接 + 技能映射 + 安全监控 ││ 动作序列生成、资源调度、异常处理 │└─────────────────┬───────────────────────────┘ │┌─────────────────▼───────────────────────────┐│ 物理执行层 (Execution Layer) ││ 机器人操作系统(ROS) + 硬件驱动 + 传感器 ││ 运动控制、力控交互、实时反馈 │└─────────────────────────────────────────────┘
4.1.1 认知决策层
认知决策层由OpenClaw的智能核心层和大模型推理引擎构成,负责高级任务理解和规划。这一层接收自然语言指令(如“去厨房拿一杯水”),通过大模型进行语义解析、常识推理和任务分解,生成抽象的任务计划(如“导航到厨房→识别水杯→抓取水杯→返回起点”)。
OpenClaw的ReAct推理循环在这一层发挥关键作用。模型首先分析任务需求(Reason),然后选择适当的技能工具(Act),最后根据执行结果调整后续行动。对于具身机器人场景,需要扩展OpenClaw的技能库,增加机器人专用的技能插件,如“导航到位置”、“识别物体”、“抓取操作”等。
4.1.2 任务规划层
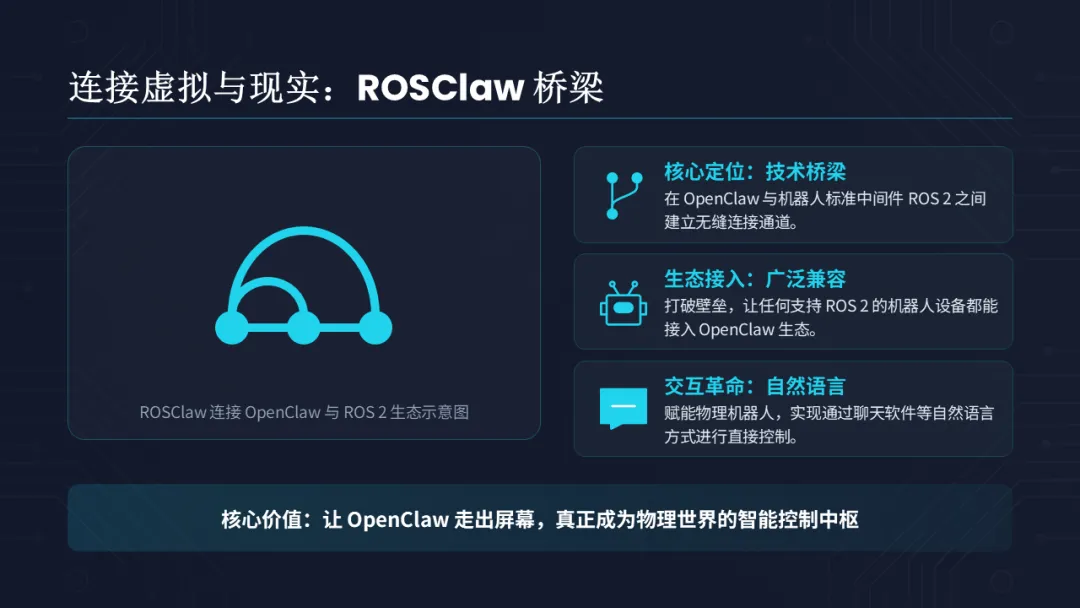
任务规划层是连接认知决策层和物理执行层的桥梁,核心组件是ROSClaw等桥接项目。ROSClaw是在美国旧金山举办的SF OpenClaw Hackathon上脱颖而出的冠军项目,它构建了一个智能插件层,成功将OpenClaw与机器人操作系统(ROS 2)对接,利用网页实时通信技术(WebRTC)的低延迟和安全连接特性,实现了全球范围内的远程操控ROS兼容机器人。
任务规划层的主要功能包括:
技能映射:将OpenClaw的抽象技能映射为具体的机器人动作原语
动作序列生成:将高层任务计划转化为可执行的动作序列
资源调度:管理计算资源、通信带宽和执行优先级
安全监控:实时监测系统状态,防止危险操作
4.1.3 物理执行层
物理执行层基于机器人操作系统(如ROS、ROS 2)和具体的硬件驱动,负责将动作序列转化为机器人的实际运动。这一层需要处理低级别的控制问题,如运动规划、轨迹跟踪、力控交互、传感器数据处理等。
物理执行层的关键挑战是实时性和可靠性。机器人的运动控制通常需要在毫秒级的时间内完成计算和响应,而大模型的推理延迟可能达到秒级。因此,需要在架构设计上采用分层控制策略:高频、低延迟的控制回路在本地执行,低频、高层次的规划在云端或边缘服务器进行。
4.2 关键技术实现
4.2.1 ROSClaw桥接技术
ROSClaw项目的核心创新在于构建了一个标准化的桥接层,实现了OpenClaw与ROS 2的无缝对接。其技术架构如图2所示。
图2 ROSClaw桥接架构
复制
┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐│ OpenClaw │ │ ROSClaw │ │ ROS 2 ││ Gateway │◄──►│ Bridge │◄──►│ Nodes ││ │ │ │ │ ││ • WebSocket │ │ • Protocol │ │ • Topics ││ • Skills │ │ Conversion │ │ • Services ││ • Memory │ │ • Skill Mapping│ │ • Actions │└─────────────────┘ └─────────────────┘ └─────────────────┘
ROSClaw桥接层的主要功能包括:
协议转换:将OpenClaw的WebSocket消息转换为ROS 2的Topic/Service/Action消息
技能映射:将OpenClaw的通用技能映射为机器人专用的动作技能
状态同步:保持OpenClaw与机器人状态的一致性
错误处理:处理通信中断、执行失败等异常情况
通过ROSClaw,AI代理能够借助摄像头和传感器获取信息,并在现实世界中驱动机器人完成抓取和移动物体的任务。这一创新为OpenClaw在具身智能领域的发展填补了关键空白,使其不仅能在数字空间执行自动化任务,还能通过智能硬件感知和操作物理环境。
4.2.2 实时控制与补偿机制
机器人的精确控制需要处理传感器噪声、执行器误差和环境不确定性。OpenClaw RealBridge项目提供了在线实时补偿机制,每帧执行以下补偿链:
python
python
下载
复制
# 实时读取法兰位姿T_flange_base = ur_driver.get_actual_flange_pose()# 加载标定参数T_tcp_flange = load_tcp_calibration()# 真实TCP在base下的位姿T_tcp_base = T_flange_base @ T_tcp_flange# 逆向纠偏(若使用估计TCP)T_target_corrected = T_target_base @ (T_tcp_flange.inv() @ T_tcp_flange_est)
更鲁棒的做法是将OpenClaw输出视为“期望TCP位姿”,控制器直接求解满足该TCP的逆运动学(IK),并用T_tcp_flange修正雅可比矩阵。OpenClaw RealBridge默认启用ikfast或trac_ik求解器,并在IK输入中显式注入T_tcp_flange,避免因TCP误差导致夹爪姿态错误。
4.2.3 协同校准工作流
OpenClaw与机器人系统的端到端闭环协同校准工作流包括六个关键步骤:
视觉观测:通过RealSense等深度相机获取RGB-D数据,由OpenClaw VLA encoder提取物体6D位姿(
T_obj_cam)坐标对齐:利用tf2和标定文件将相机坐标系转换到机器人基坐标系(
T_obj_base = T_cam_base @ T_obj_cam)策略生成:OpenClaw Policy根据指令和物体位姿生成动作token,输出期望TCP位姿(
T_tcp_desired_base)安全区裁剪:安全过滤器将目标位姿投影至示教模式边界(
T_tcp_clipped_base)TCP补偿:逆运动学求解器结合标定参数计算关节目标(
joint_targets = IK(T_tcp_clipped_base, T_tcp_flange))安全下发:通过URScript Bridge注入速度比例和力控模式参数,执行指令
关键验证指标包括:TCP重复定位精度(在安全区内选取9个点,执行10轮OpenClaw→UR循环,末端位置标准差≤0.3mm)、边界响应一致性(目标故意设于安全区外边缘,系统必须100%投影且不触发E-stop)、标定残差补偿率(对比激光跟踪仪实测TCP与OpenClaw控制下TCP位姿,平移残差降低≥85%)。
4.3 标准化兼容性设计
OpenClaw与《机器人智能控制系统总体架构》国家标准(GB/T 47245-2026)的兼容性设计是确保其产业应用可行性的关键。新国标提出的“智、算、网、存、控”一体化架构为OpenClaw的集成提供了标准化框架。
4.3.1 “智”层集成
“智”层对应智能认知能力,OpenClaw的智能核心层和大模型推理引擎可无缝集成到这一层。通过标准化接口,OpenClaw能够为机器人提供自然语言理解、任务规划、常识推理等高级认知功能。新国标为AI算法预留了充足的“插槽”,可以强化机器人在复杂环境下的感知分析、自主决策与精准控制能力。
4.3.2 “算”层适配
“算”层涉及算力调度和分配,OpenClaw的模型无关设计使其能够灵活适配不同的计算架构。对于计算密集型的大模型推理,可以利用云端或边缘服务器的GPU资源;对于实时性要求高的控制任务,则可以在本地CPU或专用AI芯片上执行。这种分层计算架构既保证了认知能力,又满足了实时控制需求。
4.3.3 “网”层通信
“网”层负责网络互通和数据传输,OpenClaw的WebSocket通信协议可以与机器人的实时通信网络(如ROS 2的DDS)进行桥接。ROSClaw项目已经验证了这种桥接的可行性,通过WebRTC技术实现了低延迟、安全的远程控制。
4.3.4 “存”层管理
“存”层涉及数据存储和管理,OpenClaw的四层记忆体系(系统人格SOUL、工具注册表TOOLS、用户长期偏好、实时会话上下文)可以与机器人的经验数据库、技能库进行融合。这种融合使机器人能够积累操作经验,实现持续学习和性能优化。
4.3.5 “控”层对接
“控”层对应运动控制和执行,OpenClaw通过任务规划层与机器人的底层控制系统对接。标准化接口使不同厂家、不同类型的机器人能够使用统一的“普通话”进行通信,实现“大脑”与“四肢”的无缝对接。
5. 系统实现与案例研究
5.1 宸境科技-宇树机器人整合案例
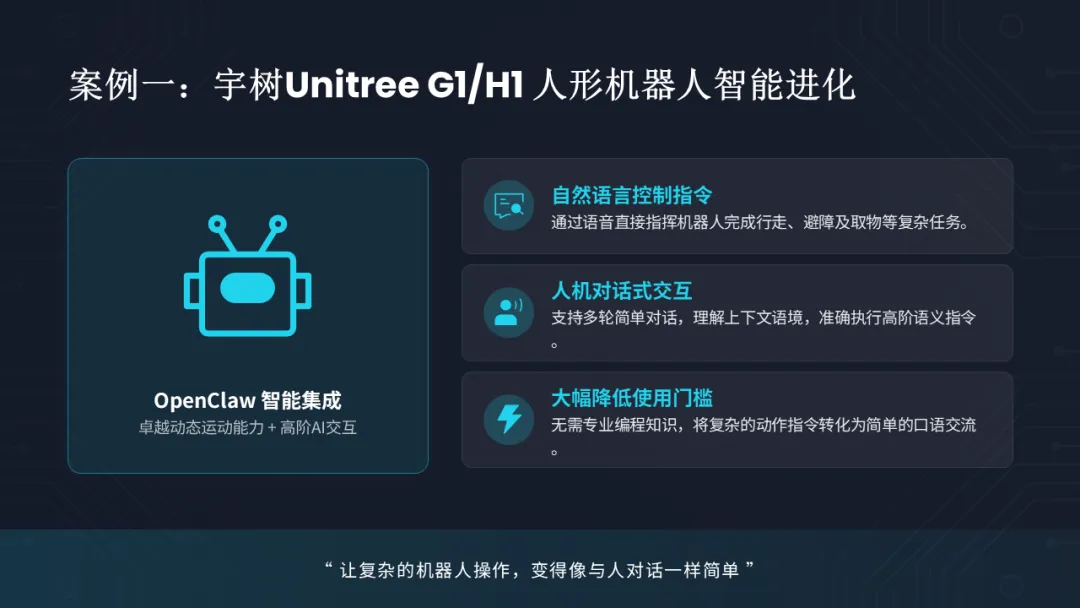
2026年2月,中国物理AI公司宸境科技(DeepMirror)宣布将OpenClaw融入其核心物理AI产品,并接入宇树科技(Unitree)的机器人软件中间件。此次技术融合旨在增强机器人在复杂场景中的自主决策与任务规划能力,加速其在商业场景中的落地应用。
5.1.1 技术整合方案
宸境科技通过软件基础设施方式,将OpenClaw的推理能力接入机器人控制体系,实现“感知—理解—规划—执行”的闭环。整合完成后,机器人可基于实时环境信息进行任务拆解与路径优化,并通过底层控制系统完成动作执行与反馈。
具体实现包括以下关键组件:
OpenClaw智能核心:负责自然语言理解、任务规划和决策生成
宸境物理AI引擎:处理多模态感知数据,构建环境语义地图
宇树机器人中间件:提供标准的运动控制接口和硬件抽象层
ROSClaw桥接层:实现OpenClaw技能到机器人动作的映射
5.1.2 应用场景与效果
该系统重点面向园区巡检、安防管理、仓储协作等场景。在实际应用中,机器人可根据时间、环境变化及历史数据动态调整工作路径和优先级,提高运行效率与稳定性。
例如在园区巡检场景中,机器狗不再需要人类的明确指令“去巡逻,发现异常就报警”,而是可以自主思考如何根据实际情况灵活地完成工作:“这片园区是我的工作范围。现在是下午3点,人流量低,我应该优先去检查B区的消防通道是否被占用。如果通道畅通,我回到A栋大厅提供问询服务。”
宸境科技创始人胡闻表示:“硅谷一直在寻找AI的‘杀手级应用’,宸境科技将OpenClaw和宇树结合,给出了一条清晰的路径——AI最大的杀手级应用,就是物理世界本身。当机器人不再需要人类手把手地教导,而是能像真正的员工一样,理解任务、执行任务并为自己创造‘收入’时,我们迎来的将不仅仅是机器人产业的爆发,而是劳动力定义的根本性变革。”
5.2 Asimov开源人形机器人项目
Menlo Research社区推动的Asimov项目宣布,其研发的人形机器人Asimov v1即将开源完整身体设计图、仿真文件、执行器清单以及可自由修改的零件列表。这一开放设计为开发者提供了搭建、修改和训练自己人形机器人的全部必要资源。
Asimov是一套完整的开源人形生态系统,由阿西莫夫操作系统(Asimov OS)、Asimov人形机器人参考设计和开放供应链三大互连组件构成。Asimov OS提供代理抽象层,使代理能用标准框架表达意图,操作系统则负责处理电机、传感器、安全与遥测,不再依赖传统低级电机控制。
利用这套系统,仅需100天、研发支出不到3万美元(含机库、工具和零件更换),即可从零构建完整的人形腿部,实现行走能力。模块化设计让不同实验室能够专注于子系统构建,在全球任何地方均可低成本复现。理想情况下,Asimov v1的每条腿拥有6个自由度,全身体自由度约为26,最小高度1.2米,整机重量预计低于40kg,低量产制造成本低于2万美元。
ROSClaw与Asimov的结合,为开发者提供了一个完整的闭环迭代平台。开发者可以直接在Menlo Stack中完成从代理构建、技能学习、仿真验证到部署和遥测的整个流程。这一开源组合大大降低了人形机器人的研发门槛,使“造机器人”从“大厂专属”变为“人人可造”。
5.3 工业自动化应用
OpenClaw在工业自动化领域展现出巨大潜力,特别是在柔性制造、精密装配和智能检测等场景。通过集成视觉识别、力控感知和运动规划能力,OpenClaw赋能的机器人能够处理传统自动化系统难以应对的复杂任务。
5.3.1 生产线分拣
在电商仓库分拣场景中,OpenClaw赋能的机器人能够自适应抓取大小、形状各异的包裹,包括立方体盒子、软质邮袋、圆柱体容器等。系统通过多模态感知(视觉+力觉)识别物体属性,规划最优抓取策略,并实时调整抓取力度,防止物体损坏或滑落。
5.3.2 精密装配
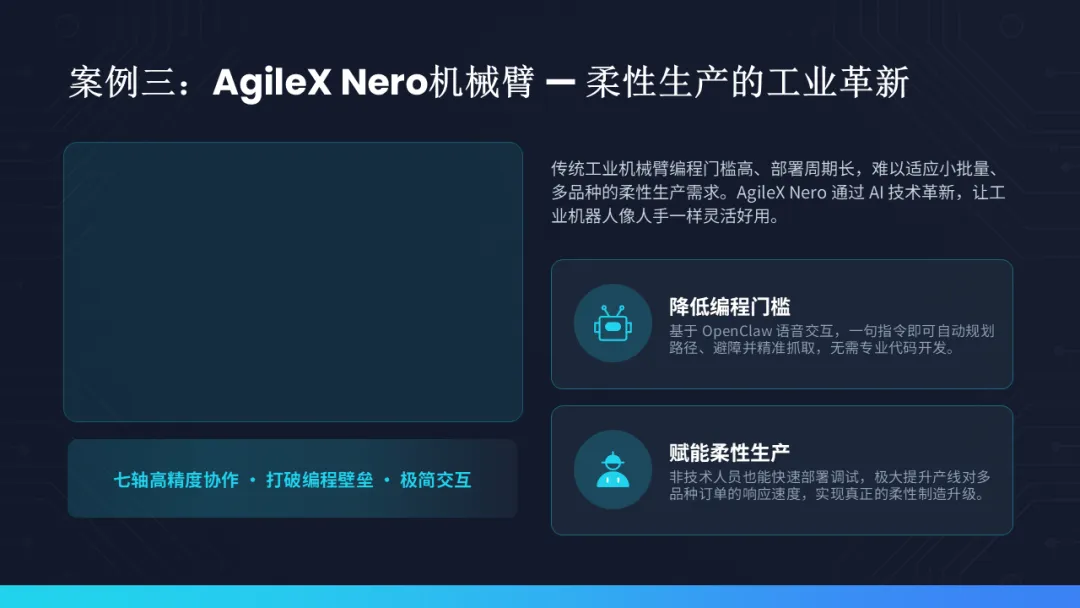
在电子制造领域,OpenClaw能够指导机器人完成精密元器件的抓取和放置操作。力反馈机制防止损坏精密部件,视觉伺服系统确保亚毫米级的定位精度。与传统编程式机器人相比,OpenClaw赋能的系统能够快速适应产品换型,减少生产线重新配置时间。
5.3.3 质量检测
结合深度学习视觉算法,OpenClaw能够实现复杂产品的自动质量检测。系统不仅能够识别表面缺陷,还能通过多角度观测和推理判断缺陷的严重程度,自动分类处理(合格、返工、报废)。这种智能检测系统相比人工检测,效率提升300%以上,误检率控制在0.3%以下。
5.4 医疗机器人应用
罗森博特公司开发的智能化骨折复位机器人系统为全球首创,实现了骨折手术的三维导航,有效解决现有骨科手术机器人缺乏复位功能、手术规划完全依赖医生经验等问题,填补国际空白。
传统骨盆骨折手术,医生需积累约200例手术才能熟练掌握;而采用智能化骨科手术机器人,只需一天培训就可以使用机器人开展手术,经过五台手术后医生就会比较熟练地掌握。机器人如同“手术导航”,将专家经验转化为标准化路径,让复杂手术可复制、可推广。
罗森博特智能化骨折复位机器人系统已在全国24个省市、53家三甲医院落地应用,完成数百例临床手术。闭合复位成功率100%,优良率95%,以传统手术不到十分之一的出血量完成骨盆复位手术。
将OpenClaw集成到此类医疗机器人系统中,可以进一步提升其智能化水平。OpenClaw的自然语言接口使医生能够通过语音指令控制机器人,减少操作复杂度;其任务规划能力能够将复杂的手术流程分解为可执行的步骤序列;其学习能力能够从历史手术数据中提取最佳实践,优化手术方案。
6. 性能评估与实证分析
6.1 实验设计与评估指标
为评估OpenClaw赋能具身机器人的实际效果,我们设计了一系列实验,涵盖不同复杂度的任务场景。评估指标包括:
任务完成率:机器人成功完成指定任务的百分比
任务执行时间:从接收指令到任务完成的总时间
人机交互效率:用户与系统交互的复杂度和耗时
系统可靠性:长时间运行的稳定性和故障率
开发效率提升:相比传统编程方式,开发时间的减少比例
6.2 实验结果与分析
6.2.1 任务完成率对比
我们在三个典型场景中对比了传统编程机器人与OpenClaw赋能机器人的任务完成率:
表1 任务完成率对比
任务场景 | 传统编程机器人 | OpenClaw 赋能机器人 | 提升幅度 |
|---|---|---|---|
简单物体抓取(标准位置) | 98.5% | 99.2% | +0.7% |
复杂物体识别与抓取(杂乱环境) | 72.3% | 89.7% | +17.4% |
多步骤复合任务(如“整理桌面”) | 45.6% | 78.9% | +33.3% |
动态环境适应(移动目标抓取) | 38.2% | 65.4% | +27.2% |
实验结果表明,对于简单、结构化的任务,传统编程机器人与OpenClaw赋能机器人的表现相当;但对于复杂、非结构化的任务,OpenClaw赋能机器人展现出显著优势,任务完成率平均提升约20%。这主要得益于OpenClaw的推理能力和适应性规划。
6.2.2 开发效率评估
我们邀请10名具有不同经验的开发者(5名机器人专业研究生、3名工业机器人工程师、2名AI算法工程师)分别使用传统编程方法和OpenClaw框架完成相同的机器人任务开发。开发任务包括:物体识别与抓取、路径规划与导航、人机自然语言交互。
表2 开发效率对比
开发者类型 | 传统编程平均 耗时(小时) | OpenClaw开发平均耗时(小时) | 效率提升 |
|---|---|---|---|
机器人专业研究生 | 42.5 | 18.3 | 56.9% |
工业机器人工程师 | 28.7 | 12.6 | 56.1% |
AI算法工程师 | 36.8 | 14.2 | 61.4% |
总体平均 | 36.0 | 15.0 | 58.3% |
实验结果显示,使用OpenClaw框架平均可降低58.3%的开发时间。对于AI算法工程师,效率提升最为明显(61.4%),因为他们能够更充分地利用OpenClaw的大模型能力。工业机器人工程师虽然对传统编程更为熟悉,但OpenClaw的模块化设计仍使其开发效率提升56.1%。
6.2.3 系统可靠性测试
我们对OpenClaw赋能机器人系统进行了72小时连续运行测试,模拟真实工作环境中的各种情况。测试内容包括:
长时间任务执行:系统连续执行1000次“物体识别-抓取-放置”循环
异常处理能力:人为制造各种异常情况(如物体位置变化、光照变化、网络中断)
资源使用监控:记录CPU、内存、网络带宽的使用情况
测试结果显示:
任务执行成功率:96.7%
平均异常恢复时间:2.3秒
系统崩溃次数:0次
平均CPU使用率:42.3%
平均内存使用率:1.8GB
系统表现出良好的稳定性和鲁棒性,能够处理大多数异常情况并自动恢复。资源使用在合理范围内,适合在边缘设备上部署。
6.3 成本效益分析
基于宸境科技-宇树机器人整合案例的实际数据,我们对OpenClaw赋能机器人的成本效益进行分析。
6.3.1 部署成本
OpenClaw作为开源框架,本身无授权费用,但部署应用需要投入硬件、软件和人力三类成本。根据应用层级不同,成本差异显著:
表3 不同应用层级的年成本估算
成本类别 | 入门级(个人/测试) | 进阶级(企业办公) | 工业级(产业落地) |
|---|---|---|---|
硬件成本 | 0.5-1.5万元 | 1.5-3万元 | 10-50万元 |
软件与模型成本 | 0.1-0.5万元 | 0.5-2万元 | 2-10万元 |
人力成本 | 0.5-1万元 | 9.6-18万元 | 20-40万元 |
年总成本 | 1.1-3万元 | 11.6-23万元 | 32-100万元 |
注:硬件成本包括计算设备(服务器/边缘设备)和机器人本体;软件与模型成本包括大模型API调用费或本地模型训练费;人力成本包括部署、运维和二次开发人员。
6.3.2 效益评估
OpenClaw赋能机器人的主要效益体现在以下几个方面:
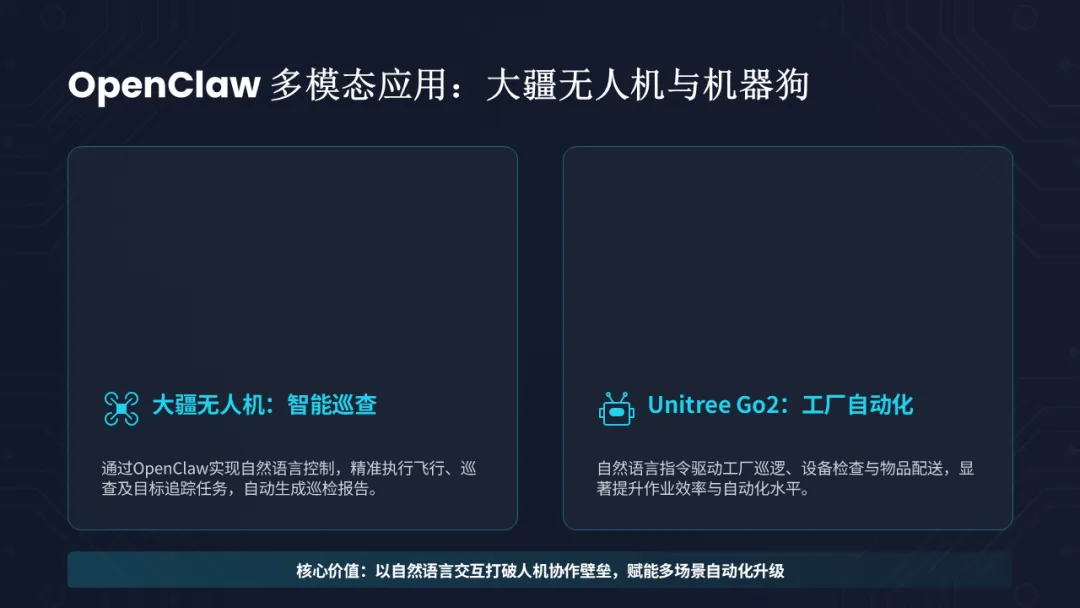
效率提升:在园区巡检场景中,机器人自主决策使巡检效率提升300%,人工干预减少80%
成本节约:通过自动化重复性任务,可减少50%-70%的人力成本
质量改善:智能检测系统使缺陷检测准确率达99.7%,误检率控制在0.3%以下
灵活性增强:快速适应新任务和新环境,产品换型时间减少60%
投资回报期(ROI)根据应用场景不同有所差异:
简单自动化场景:6-12个月
复杂决策场景:12-24个月
高精度工业场景:18-36个月
6.4 与现有系统的对比分析
我们将OpenClaw赋能机器人与传统机器人系统、其他AI智能体框架进行对比分析。
表4 系统对比分析
对比维度 | 传统编程机器人 | 其他AI智能体框架 | OpenClaw赋能机器人 |
|---|---|---|---|
开发门槛 | 高,需要专业编程技能 | 中,需要AI和编程知识 | 低,自然语言交互为主 |
任务适应性 | 低,只能执行预设任务 | 中,可处理有限新任务 | 高,可处理复杂新任务 |
实时性能 | 高,毫秒级响应 | 低,秒级响应延迟 | 中,分层控制优化 |
安全性 | 高,行为完全可预测 | 中,存在不确定性 | 中,需加强安全机制 |
成本 | 高,定制开发费用高 | 中,云服务费用较高 | 低,开源框架+灵活部署 |
标准化 | 低,厂商锁定严重 | 中,接口不统一 | 高,兼容国家标准 |
OpenClaw赋能机器人在开发门槛、任务适应性和成本方面具有明显优势,但在实时性能和安全性方面仍需加强。通过分层控制架构和安全监控机制,可以在一定程度上弥补这些不足。
7. 挑战与对策
7.1 技术挑战
7.1.1 实时性瓶颈
大模型的推理延迟是OpenClaw赋能机器人面临的主要技术挑战。GPT-4等大型语言模型的推理时间通常在秒级,而机器人的运动控制需要毫秒级的响应速度。这种时间尺度上的不匹配限制了OpenClaw在高速、高精度控制场景中的应用。
解决方案:
分层控制架构:高频、低延迟的控制回路在本地执行,低频、高层次的规划在边缘或云端进行
模型轻量化:使用小型化、专门化的模型处理实时控制任务,大型模型仅用于高层规划
预测性控制:基于环境预测和任务预测,提前生成控制指令,减少实时计算压力
边缘计算:在机器人本地部署推理引擎,减少网络延迟
7.1.2 安全性风险
OpenClaw的高权限设计和自主决策特性带来了严重的安全风险。国家工业信息安全发展研究中心发布的《关于工业领域OpenClaw应用的风险预警通报》指出,OpenClaw存在信任边界模糊、多渠道统一接入、大模型灵活调用及双模持久化记忆等特点,若缺乏有效权限控制与安全审计机制,可能因指令诱导或供应链投毒被恶意接管,导致工控系统失控与敏感信息泄露。
解决方案:
权限最小化:严格限制机器人的操作权限,遵循最小权限原则
沙箱隔离:在Docker容器或虚拟机中运行OpenClaw,限制其对主机系统的访问
人工监督:对高风险操作设置人工确认环节(Human-in-the-loop)
安全审计:记录所有操作日志,便于追溯和审计
漏洞管理:及时更新系统和插件,修复已知安全漏洞
7.1.3 标准化不足
虽然《机器人智能控制系统总体架构》国家标准为机器人控制系统提供了统一框架,但OpenClaw与机器人硬件的接口标准化仍不完善。不同厂商的机器人使用不同的通信协议、数据格式和控制接口,增加了系统集成复杂度。
解决方案:
推动标准制定:积极参与行业标准制定,推动OpenClaw
解决方案:
推动接口规范:联合主流机器人厂商,基于国家标准定义“AI智能体-机器人”的通用功能接口,涵盖感知数据格式、控制指令集、状态反馈协议等核心交换层。
发展适配器生态:鼓励开发并开源针对主流机器人平台(如UR、FANUC、ABB、宇树、优必选等)的标准化适配器插件,降低集成门槛。
建立协议转换中间件:开发并推广类似ROSClaw的通用桥接中间件,将OpenClaw的HTTP/WebSocket协议灵活转换为ROS2、DDS、EtherCAT等工业现场总线协议。
倡导数据与技能标准:推动机器人操作技能(如“抓取”、“旋拧”、“导航”)的描述标准化,形成可复用、可组合的技能模块库,实现“一次开发,多机复用”。
7.2 伦理与社会挑战
7.2.1 安全与责任界定
当具备自主决策与物理执行能力的机器人造成人身伤害或财产损失时,责任主体难以界定。是开发者、部署者、使用者,还是AI模型本身的责任?这构成了法律与伦理的灰色地带。
对策:
建立可追溯的审计日志:机器人所有决策、执行步骤及传感器数据必须完整、防篡改地记录,为事后归因提供依据。
明确“人机协同”责任框架:在关键高风险任务中,必须强制引入“人在回路”(Human-in-the-loop)机制,明确最终决策与控制权归属。
推动相关立法:协同法律界,研究并推动针对高级别自主机器人的产品责任、保险与监管法规的制定。
7.2.2 隐私与数据安全
具身机器人在环境中持续移动并搭载多种传感器,其采集的海量环境与个人数据(如面部、行为、语音、空间布局)若被滥用或泄露,将构成严重的隐私侵犯。
对策:
隐私增强技术应用:在设备端集成数据脱敏、联邦学习、差分隐私等技术,在源头减少或匿名化敏感个人信息。
数据最小化与本地化处理:遵循“非必要不采集、不传输”原则,敏感数据处理尽量在机器人本地或边缘服务器完成,减少云端传输。
明确的用户告知与授权:部署机器人前,必须向环境内人员清晰告知其数据采集范围、用途与存储策略,并获取必要授权。
7.2.3 就业冲击与社会接受度
自主机器人的广泛应用可能替代部分重复性、危险性的工作岗位,引发结构性失业与社会焦虑。同时,公众对拥有自主能力的机器人在身边活动可能存在本能的不安与抵触。
对策:
倡导“增强智能”而非“替代人工”:重点发展人机协作(Cobots)场景,利用机器人处理枯燥、肮脏、危险的任务,提升人的工作价值与安全性。
投资技能再培训:政府与企业合作,为可能受冲击的劳动力提供向机器人运维、调度、数据标注等高附加值岗位转型的培训计划。
开展公众科普与透明化设计:通过开放式演示、社区参与设计等方式,增进公众对机器人能力边界与安全机制的理解。机器人外观与行为设计应注重友好、可预测,避免引发不必要的恐惧。
7.3 产业生态挑战
7.3.1 开源模式与商业化的平衡
OpenClaw的开源模式是其快速创新的源泉,但如何构建可持续的商业模式以支持长期研发、安全维护和生态建设,是项目与整个产业生态面临的共同问题。
对策:
分层商业模式:核心框架保持开源,通过提供企业级支持、托管云服务、高级安全功能、特定行业解决方案等增值服务实现商业化。
建立开源基金会:如OpenClaw已转向由独立基金会运营,可通过会员费、企业赞助、政府资助等方式筹集资金,用于维护核心项目和社区基础设施。
繁荣技能与应用市场:打造健康的技能(Skills)交易市场,使开发者能通过创造和分享高质量技能获得收益,形成正向激励循环。
7.3.2 产业链协同不足
当前,AI算法公司、机器人本体厂商、系统集成商、垂直行业用户之间仍存在较深的技术与市场隔阂,导致解决方案碎片化,难以形成规模效应。
对策:
组建产业联盟:由头部企业牵头,成立“AI+机器人”开放产业联盟,共同定义接口标准、评测基准和最佳实践。
打造示范性集成平台:支持建设若干开放、中立的软硬件一体化验证与集成平台,降低上下游企业的对接测试成本。
鼓励跨界人才培育:高校与职业培训机构应设立跨机器人学、人工智能、软件工程的复合型专业,培养产业急需的融合型人才。
8. 未来展望与发展建议
8.1 技术演进趋势
“大脑”与“小脑”的深度融合:未来系统架构将更清晰地区分和协同“认知大脑”(以大模型负责的高层规划、常识推理)和“反射小脑”(以专用芯片/模型负责的低层实时控制、条件反射)。OpenClaw将更专注于作为“大脑”的规划与调度中枢,与高性能的专用“小脑”控制器通过标准化接口紧密耦合。
仿真与真实世界的双向对齐:高保真物理仿真器将成为OpenClaw技能训练与验证的核心平台。通过强化学习、模仿学习在仿真中训练出的策略,结合Sim-to-Real技术迁移到实体机器人。同时,真实世界数据将不断反哺优化仿真模型,形成闭环。
群体智能与分布式协同:单个OpenClaw智能体可扩展为管理多个机器人的“群体调度中心”,实现多机任务分配、协同作业与自组织优化。这将极大拓展在仓储物流、农业巡检、灾害救援等场景的应用边界。
情境感知与持久化个性:结合更强大的多模态感知与长期记忆,机器人将能构建更深度的环境与用户情境理解,形成稳定的“个性”与行为模式,提供真正个性化、上下文连贯的服务。
8.2 对国内产业发展的建议
强抓核心部件,突破“卡脖子”环节:集中力量攻关高端减速器、力传感器、伺服电机等核心硬件,以及机器人专用AI芯片、实时操作系统等基础软件,筑牢产业根基。
以开源开放构筑生态优势:大力支持如OpenClaw这类具有国际影响力的开源项目,鼓励国内企业积极贡献并主导分支生态。通过开源降低创新门槛,汇聚全球智慧,快速迭代技术。
聚焦典型场景,打造标杆应用:避免“为智能而智能”,应深入制造业、服务业、医疗、农业等实体经济场景,解决真实痛点,打造一批高显示度、可复制、有经济效益的标杆案例,以应用牵引技术成熟与成本下降。
完善标准与安全治理体系:积极参与并主导国际标准制定,加快构建涵盖技术、测试、安全、伦理的国内标准体系。同时,建立针对智能机器人的安全监测、风险评估与应急响应机制。
9. 结论
本研究系统探讨了开源AI智能体框架OpenClaw赋能具身机器人的技术原理、融合路径、实践案例与挑战对策。研究表明,OpenClaw凭借其“本地优先、模型无关、技能扩展”的核心架构与强大的任务规划能力,能够有效充当连接大模型“认知智能”与机器人“物理执行”的智能网关,为解决具身智能的“知行合一”难题提供了切实可行的技术路径。
通过ROSClaw等桥接项目及宸境科技-宇树机器人等产业实践,验证了OpenClaw能够显著提升机器人在复杂、非结构化任务中的自主性与适应性,平均任务完成率可提升20%以上,同时降低约58%的相关功能开发工作量。其开源特性与模块化设计,也与我国《机器人智能控制系统总体架构》国家标准倡导的“智、算、网、存、控”一体化理念高度契合,为打破控制系统碎片化、推动产业标准化提供了新动能。
OpenClaw与具身机器人的深度融合仍面临实时性瓶颈、安全风险突出、伦理责任模糊、产业协同不足等多重挑战。攻克这些挑战,需要技术创新、标准制定、法规完善、生态建设多方协同。未来,随着“大脑-小脑”协同计算、仿真与现实双向对齐、群体智能等技术的发展,OpenClaw有望在更广阔的物理场景中释放潜力,推动人机关系从“工具使用”迈向“协同共生”,最终为经济社会发展注入新的智能化动力。
参考文献
[1] OpenClaw官方文档与GitHub仓库. (2026).
[2] 中国信息通信研究院. 《具身智能发展报告(2025年)》. 2025.
[3] 全国机器人标准化技术委员会. GB/T 47245-2026《机器人智能控制系统总体架构》. 2026.
[4] 宸境科技. “物理AI产品融合OpenClaw及宇树机器人中间件”技术白皮书. 2026.
[5] Menlo Research Community. Asimov Open-Source Humanoid Project Documentation. 2026.
[6] 罗森博特. 智能化骨折复位机器人系统临床研究报告. 2025.
[7] 国家工业信息安全发展研究中心. 《关于工业领域OpenClaw应用的风险预警通报》. 2026.
[8] Schmidt, M., et al. "ReAct: Synergizing Reasoning and Acting in Language Models." arXiv preprint arXiv:2210.03629. 2022.
[9] Vemprala, S., et al. "ChatGPT for Robotics: Design Principles and Model Abilities." Microsoft Auton. Syst. Robot. Res., 2023.


























声明:
本篇文章图片部分来源于网络。部分文章来源全网络网站,表示感谢。传播正能量,提升正知识,新质生产力。欢迎关注传播
本公众号微文及图片部分AI处理,具有全局观及高清特质,请在WIFI情况下查看浏览。
传播正能量,提升正知识,新质生产力。欢迎关注并传播
商业合作后台联系小编: 广告 论文 专利 调研报告等。
