 夜雨聆风
夜雨聆风你开了多个OpenClaw机器人在不同平台,管理起来是不是快疯了?
现在好了,国内开发者开源了一个仪表盘,一口气解决所有问题。
相信很多OpenClaw玩家都遇到过这个问题:
你开了多个机器人,分别接了飞书、Discord、微信,每个机器人用不同模型,跑不同任务——
🔀 哪个机器人绑定了哪个模型?忘了 🔌 Gateway突然挂了,你得一个个查 💰 这个月token花了多少?心里没数 🛠️ 装了哪些技能?得去文件夹翻
现在这个叫 OpenClaw-bot-review 的开源仪表盘,直接把这些问题全解决了。

最关键的是——🗄️ 不用数据库,直接读你本地的 `~/.openclaw/openclaw.json` 和会话文件,一分钟就能启动。
GitHub页面写得很清楚,核心功能一共这几个,每个都打到痛点上:
🖼️ 1. 机器人总览
卡片墙展示所有机器人,每个机器人的名称、emoji、模型、平台绑定、会话统计、Gateway健康状态一眼看完
📋 2. 模型列表
所有配置好的provider和模型全列出来,上下文窗口、最大输出、推理支持都标清楚,还能一键测试模型连通性
💬 3. 会话管理
按机器人浏览所有会话,自动识别私聊/群聊/定时任务,token用量一目了然,还能一键测连通性
📊 4. 统计面板
token消耗和平均响应时间趋势,按天/周/月看,SVG图表直观展示
🔧 5. 技能管理
所有安装过的技能(内置/扩展/自定义)全列出来,支持搜索筛选
🚨 6. 告警中心
配置告警规则(模型不可用、机器人无响应),支持飞书通知
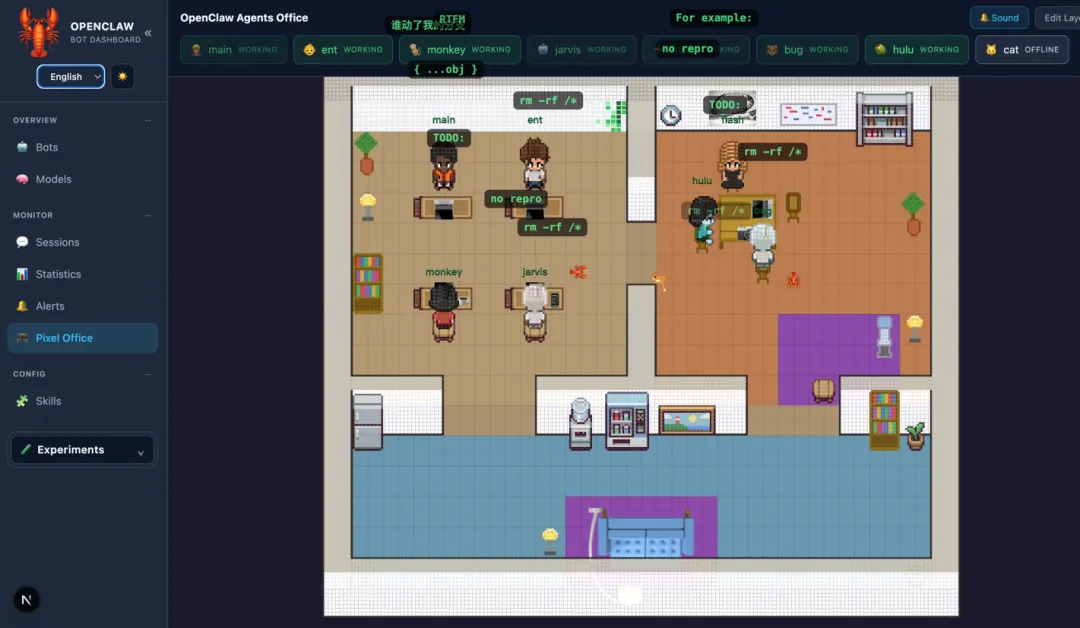
🎮 7. 像素办公室(最有意思的功能)
每个机器人变成像素办公室里的动画角色,会走路会坐下会互动,你打开dashboard就能看你的机器人"上班"
总结一下:你能想到的监控需求,它都给你做好了。
作者写了非常清晰的部署文档,国内玩家三步就能启动:
# 1. 克隆仓库git clone https://github.com/xmanrui/OpenClaw-bot-review.gitcd OpenClaw-bot-review# 2. 安装依赖npm install# 3. 启动开发服务器npm run dev然后浏览器打开 http://localhost:3000 就能用了。
如果你想用Docker部署,也打包好了:
# 构建镜像docker build -t openclaw-dashboard .# 运行容器docker run -d -p 3000:3000 openclaw-dashboard# 自定义配置路径docker run -d --name openclaw-dashboard -p 3000:3000 -e OPENCLAW_HOME=/opt/openclaw -v /path/to/openclaw:/opt/openclaw openclaw-dashboard默认直接读你的本地配置文件,不用额外配置,拿来就能用。
作为一个开源项目,这个仪表盘很多细节做得非常到位:
🌍 支持中英文切换 —— 国内外玩家都能用 🌓 支持深色/浅色主题 —— 什么时候看都舒服 🎨 像素办公室真的会动 —— 枯燥的运维变成了"养机器人"
能看出来,作者自己就是OpenClaw深度玩家,知道玩家真正需要什么。
从最开始的核心框架,到现在越来越多第三方开发者做工具、做扩展,OpenClaw生态真的活起来了。
这个仪表盘就是最好的例子——
用户有痛点,开发者站出来解决,开源出来大家一起用。
现在你打开OpenClaw,再也不用一个个记模型查状态了,打开仪表盘一眼看完。
感兴趣的玩家快去试试,还能看看你的机器人一起上班~

