 夜雨聆风
夜雨聆风前面的文章我们介绍了
该文章介绍了如何创建飞书机器人以及如何绑定openclaw的agent。
这篇文章将在此基础上进行扩展,进行多agent的配置。
一、我们为什么需要多智能体?
在进行多agent配置讲解之前,我们首先来解释一下为什么需要多agent?
在我们人类社会有”专业的事交给专业的人“的说法,在agent的世界里也是一样的。写代码的任务交给代码agent去做,写小说的任务交给小说agent去做。有些朋友可能会好奇,现在大模型能力很强,既可以写代码,又可以小说,如果agent都是连接同一个大模型,还有必要通过不同的agent来完成吗?我的回答是目前还是有必要的。主要原因是,如果让一个agent处理各种不同领域的问题,随着上下文的增大,大模型可能会失去某些细节的注意力,回答的质量可能会变差。让一个agent只处理某一个领域的任务,可以对生成的答案有更好的约束。
另外,不同的模型有不同的侧重,有些模型擅长3d建模、有些模型图片生成的质量更高一些,有些模型更擅长编码,有些模型便宜,有些模型昂贵,基于各种各样的原因,我们希望让不同agent连接不同的大模型去处理不同的任务,达到最佳的投入产出比。基于这个原因,我们也是需要不同的agent。
二、多agent配置
1)在终端运行命令,添加新的agent
# 创建新的 agent命令格式:
# openclaw agents add <agent名称>
# 添加一个程序员agent
openclaw agents add programmer
运行该命令之后,会显示为该agent创建的workspace的位置,按回车确认,接着会有一系列的配置比如channel的配置等,我们暂时选否不进行配置。
# 或者添加新agent的同时指定模型和工作空间
openclaw agents add programmer --workspace <工作空间目录> --model <模型提供商/模型id>
# 查看我们创建的agent列表
openclaw agents list
# 通过命令行的方式给我们创建的agent发送消息
openclaw agent --agent <agent的名称> --message "你的消息"
2)配置飞书机器人
基本的流程跟一人公司就这么搞——给openclaw龙虾安装飞书插件
里面描述的差不多一样。我需要再创建一个应用,添加机器人,配置权限,设置事件订阅方式等。
这里我们有以下几个不一样的地方需要注意:
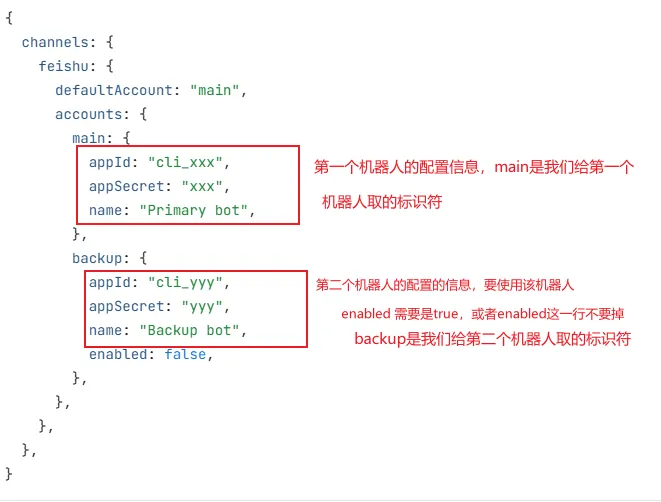
1、需要在~/.openclaw/openclaw.json配置文件中,找到channels.feishu 把配置内容改成类似下面截图的格式,其实就是把我们之前机器人的配置信息,移到【accounts.机器人标识】下面
2、需要做agent和机器人绑定
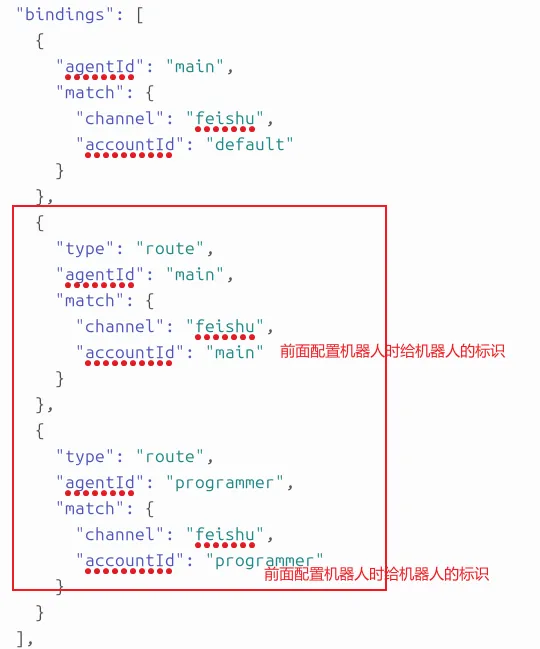
在配置文件中,找到bindings,做如下类似的配置,根据自己的情况填写
其余的配置步骤 请参考一人公司就这么搞——给openclaw龙虾安装飞书插件
3、重启网关,让配置生效
openclaw gateway restart
4、给新创建的机器人发送消息,做配对操作。
配对操作,可以参考一人公司就这么搞——给openclaw龙虾安装飞书插件
好了,到此基于飞书的多agent就配置完成了,感谢观看!
如果你是刚开始接触openclaw,还不知道怎么安装,可以查看一下我的其他文章:
