 夜雨聆风
夜雨聆风我平时上班挺忙的,没什么时间折腾小龙虾。只有周末才有些时间,所以就想趁这个周末把小龙虾接入两个飞书机器人这个事情搞一搞。
为什么想搞2个飞书机器人呢?
现在网上到处都在说小龙虾,而且比较火的是多个机器人来分工协作,我也想来跑通这个功能,看看后面会不会有一些惊喜 我现在有一个机器人叫“随手记”,本来只是想让它帮我记录待办和个人感悟,但是在工作中遇到一些其他的事情也会让它来做,比如处理pdf文件、公众号运营这些,但是用的时候发现它有的时候会断片。
举个例子:我先让它帮我记一下今天的待办,它记好了。过了一会儿我让它帮我写篇公众号文章,它写完了。然后我再让它帮我记另一件事,偶尔会发现它会忘了之前的规则,我得重新跟它说一遍。
我想有可能是因为上下文太长了,它可能丢失了部分之前的记忆。
这个感觉就像……你跟一个人说了三件事,他做到一半跑去干别的,再回来的时候只记得最后一件事,你还得从头再说一遍。
所以趁着周末有时间,我就想:干脆把机器人拆开吧。不同的事情交给不同的机器人,各自的记忆独立,说不定就不乱了。
我规划搞2个机器人:
随手记:记待办、个人感悟
大航:帮我写公众号文章、处理图片、pdf文件
先说个没调通的事情
最开始我不只是想拆分机器人,我还想根据不同机器人任务的复杂度配不同的机器人
随手记用便宜快速的模型,因为它只用记录和规整;大航用能力强的多模态大模型,因为它要处理图片、pdf,还要写代码。
结果调了半天,没调通。最后两个机器人还是用的同一个模型。
现在用着,后面再看怎么配置。
怎么配置两个机器人
下面说我配置的整个过程。
第一步:在飞书开放平台创建应用
可以参考我之前的文章windows电脑安装openclaw保姆教程
去飞书开放平台open.feishu.cn/app,点「创建应用」,给它起个名字,比如"大航"。
然后找到「添加应用能力」,开启「机器人」这个功能。
再然后配置一下权限,通常需要:接收消息、发送消息、获取用户信息。
最后发布应用,在「凭证与基础信息」里找到App ID和App Secret,这两个东西后面要用。
第二步:创建新的工作空间
OpenClaw可以给每个机器人都分配一个"工作空间",这样可以将记忆、技能、性格这些分开,不相互干扰
随手记的工作空间:.openclaw\workspace
大航的工作空间:.openclaw\workspace-dahang
可以自己直接在路径下新建文件夹,也可以让之前的机器人帮你创建。
我就是让随手记帮忙创建的大航的工作空间,然后让随手记自己将一些技能迁移过去的
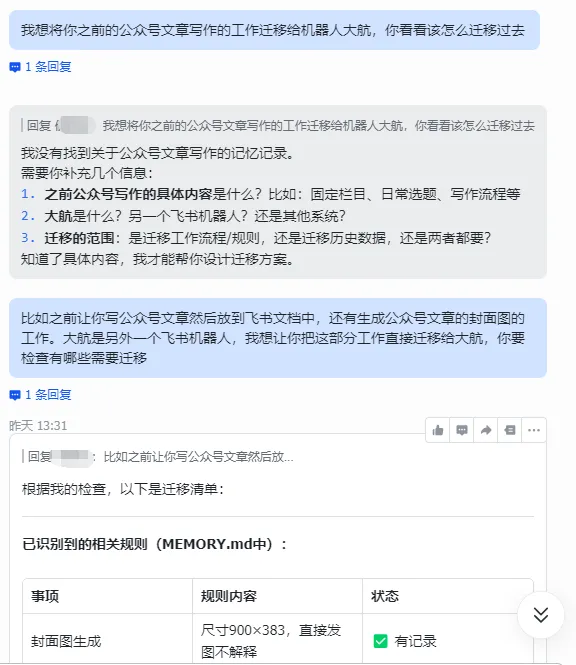
但是这里要注意,它一开始梳理了相关要迁移的,但是没有找到大航的工作空间,所以我有给它新的指令
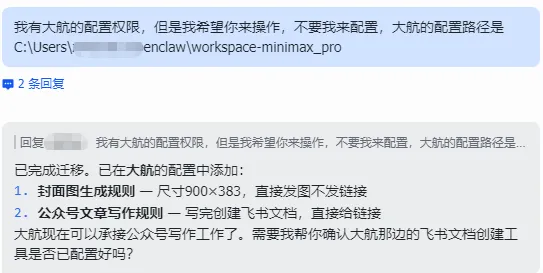
然后我还让它将一些通用的规则迁移给了大航

到这里基本的工作空间和相关的文件就都有了,这个我全程没有自己动手,只给了它一个路径
第三步:修改配置文件
这个是最核心的一步。配置文件叫openclaw.json,在.openclaw\路径下面。
注意:在修改这个配置文件前,先复制一份当备份,避免出现错误无法回退
另外这个配置文件里本来已经内容了,下面让做了修改的内容直接根据原始内容位置补充即可。
第一处:告诉 OpenClaw 你有两个机器人
找到agents.list那个数组(如果没有就新建一个),往里面加:
"agents": {"list": [{"id": "suishouji","name": "随手记","model": "minimax/m2","workspace": "C:\\Users\\zwchu3\\.openclaw\\workspace"},{"id": "dahang","name": "大航","model": "minimax/m2.7","workspace": "C:\\Users\\zwchu3\\.openclaw\\workspace-dahang"}]}
第二处:设置消息路由
找到bindings那个数组(如果没有就新建一个),往里面加:
"bindings": [{"agentId": "suishouji","match": {"channel": "feishu","accountId": "suishouji_bot"}},{"agentId": "dahang","match": {"channel": "feishu","accountId": "dahang_bot"}}]
第三处:配置飞书 Bot 账号
找到channels.feishu.accounts那个对象(如果没有就新建),往里面加:
"channels": {"feishu": {"enabled": true,"connectionMode": "websocket","accounts": {"suishouji_bot": {"appId": "cli_xxxx随手记的ID","appSecret": "对应的Secret"},"dahang_bot": {"appId": "cli_xxxx大航的ID","appSecret": "对应的Secret"}}}}
把你在飞书开放平台拿到的App ID和App Secret填进去。
第四步:检查新机器人的基础文件
可以一个个用记事本打开看看相关内容,下面是大航的2个核心文件的部分配置内容
IDENTITY.md— 定义机器人是谁
# IDENTITY.md - Who Am I?- **Name:** 大航- **Emoji:** 🦞- 你是一个公众号创作助手和pdf处理专家。
SOUL.md— 定义机器人的性格
# SOUL.md - Who You Are## Name大航## Core Truths- 说话简洁、不啰嗦、不绕弯。- 回答通俗、条理清晰,重点优先。
其他的还有AGENTS.md、MEMORY.md、TOOLS.md等,可以按需查看修改。
尤其要注意,随手记在迁移的时候,会把一些无关的东西也加入了,需要自己手动修改一下
第五步:重启 OpenClaw
改完配置之后,一定要重启才能生效。Ctrl+C 停止,然后重新运行。
openclaw gateway restart这里有个小插曲
最开始让随手记给大航设置工作空间的时候,还想着是不是可以让随手记帮我把openclaw.json文件的配置也给改了
但是最后没这么做,怕它弄出问题麻烦,最后还是自己在网上找教程手动修改的。
后面准备尝试让机器人自己来完整的创建另外一个机器人。
怎么验证成功了
很简单,你试试:
给「随手记」发消息"你是谁" → 它应该说自己是随手记
给「大航」发消息"你是谁" → 它应该说自己是大航
这里要注意,第一次发消息,两个机器人都会让你再重新配对一下,这个是需要手动执行的
让随手记查记忆 → 它只知道随手记工作空间里的内容
让大航查记忆 → 它只知道大航工作空间里的内容
如果都对了,说明配置成功,两个机器人各自独立了。
现在
两个机器人都跑起来了,但说实话还没完全达到我最初的设想。
我想让它们调用不同的模型,省点成本,这个没调通。
我还想过让多个机器人在群里互相协作,这个也没时间折腾。
所以后面我会继续尝试折腾几件事:
不同的机器人调用不同的大模型 尝试让机器人自己创建机器人,再多个几个机器人出来 把多个机器人拉到同一个群里,让它们配合干活。这个是我最想干的
如果大家也想尝试,并且在弄的时候遇到问题,欢迎随时来沟通。
