 夜雨聆风
夜雨聆风宇树 Go2 是一款面向开发者和科研人员设计的高性能四足机器人,搭载了强劲的电机驱动系统与丰富的传感器套件,能够执行从简单站立到复杂地形穿越的多种任务。本次测试所使用的正是这一型号。
宇树 Go2 机器狗照片如下:

基础运动控制:04_sport_basic.py
测试目标与背景
本次测试的核心脚本为 04_sport_basic.py,对应测试编号 04,聚焦于通过 SportClient 接口对宇树 Go2 执行高级运动服务中的基础动作控制。SportClient 是宇树 SDK 提供的高层运动控制抽象,它封装了底层的电机控制与步态规划逻辑,允许开发者以简洁的接口调用站立、行走、转向等预定义动作,无需手动干预每条腿的关节角度计算。
这一层抽象对于快速原型开发和功能验证至关重要。通过标准化的运动指令,我们能够在短时间内建立起对机器人能力边界的直观认知,为后续更复杂的应用开发奠定基础。
动作序列设计
测试程序被设计为一个交互式的分步执行流程,操作者在每一步动作前手动确认,确保在任何异常情况下都能及时中断。整个动作序列经过精心编排,涵盖了机器狗从静止到运动再回到静止的完整状态转换:
1.StandUp(站起) — 机器狗从趴卧状态抬起躯干,四肢支撑地面,过渡至站立姿态。这是所有后续运动的前提状态。
2.BalanceStand(平衡站立) — 在站立基础上激活动态平衡模式,机器狗通过实时调整各关节力矩来抵抗外界干扰,保持稳定的直立姿态。
3.Move 向前 0.3 m/s,持续 3 秒 — 以中低速向前行走,验证速度指令的响应性与行走的平滑性。
4.StopMove(停止) — 平稳制动,终止行走状态。
5.SpeedLevel 设为 1(中速) — 调整全局速度档位,为转向测试提供合适的运动参数。
6.原地左转 0.5 rad/s,持续 2 秒 — 验证原地转向功能,测试偏航角速度指令的执行精度。
7.StandDown(趴下) — 机器狗平稳降低重心,四肢收折,回到趴卧状态,完成测试闭环。
安全注意事项
在执行任何物理运动测试前,安全保障始终是第一优先级。本次测试遵循以下关键规范:
•场地净空要求:机器人周围 2 米范围内须保持无障碍物,防止机器人在运动过程中发生碰撞,同时也保护现场人员的人身安全。
•运动模式预设:机器人须预先切换至高级运动模式(normal 或 ai 模式),SportClient 的高层指令才能被正常解析和执行。若机器人处于低级控制模式,相关指令将无法生效。
•交互式确认机制:程序在每步动作前均暂停等待操作者按下回车键,赋予操作者充分的观察和干预窗口,避免连续动作在异常情况下失控执行。
运行方式
在确认上述安全条件满足后,通过以下命令启动测试脚本:
python 04_sport_basic.py运行结果
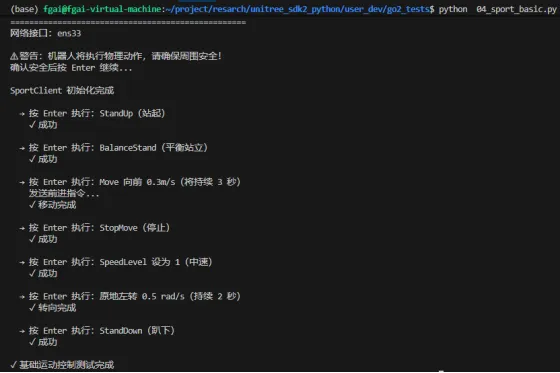
测试在实验室环境下顺利执行,控制台输出如下,所有动作均返回成功状态码(code=0):
(base) fgai@fgai-virtual-machine:~/project/resarch/unitree_sdk2_python/user_dev/go2_tests$ python 04_sport_basic.py==================================================Go2 SportClient 基础运动控制测试==================================================网络接口:ens33⚠ 警告:机器人将执行物理动作,请确保周围安全!确认安全后按 Enter 继续...SportClient 初始化完成→ 按 Enter 执行:StandUp(站起)✓ 成功→ 按 Enter 执行:BalanceStand(平衡站立)✓ 成功→ 按 Enter 执行:Move 向前 0.3m/s(将持续 3 秒)发送前进指令...✓ 移动完成→ 按 Enter 执行:StopMove(停止)✓ 成功→ 按 Enter 执行:SpeedLevel 设为 1(中速)✓ 成功→ 按 Enter 执行:原地左转 0.5 rad/s(持续 2 秒)✓ 转向完成→ 按 Enter 执行:StandDown(趴下)✓ 成功✓ 基础运动控制测试完成
整个测试过程中,机器狗响应迅速,各动作之间的过渡流畅自然,未出现抖动或异常停机的情况。每条指令返回的状态码均为 0,表明 SDK 层面的通信链路与运动控制模块均工作正常。
实测视频
下方视频完整记录了本次基础运动控制测试的全过程,涵盖平衡站立、缓慢前行、原地左转以及最终趴下等关键动作节点,直观展示了机器狗在各运动指令下的实际表现:
测试小结
本次测试全面覆盖了宇树 Go2 高级运动服务中的核心基础指令,验证结果令人满意。SportClient 的接口调用逻辑清晰,返回码机制完善,为上层应用的状态监控提供了可靠依据。从实测效果来看,机器狗的运动响应延迟低,动作执行精度高,平衡控制稳定,具备支撑更复杂任务开发的能力基础。
值得关注的是,BalanceStand 模式下的动态稳定效果尤为出色——即便在地面略有不平的条件下,机器狗也能通过实时姿态调整保持机身水平,这得益于宇树 Go2 内置的高频率状态估计与控制循环。这一能力在后续面向复杂地形或带负载的应用场景中将发挥重要作用。
下期预告:在完成基础运动控制验证之后,我们将进入更具观赏性与技术挑战的环节——舞蹈及特技动作控制。宇树 SDK 内置了丰富的预定义特技动作库,我们将逐一测试这些动作的触发方式与执行效果,敬请期待。
