夜雨聆风
夜雨聆风今天下班时,我接到了领导的安排,让我研究下当下圈内大火的 OpenClaw,看看能不能顺利接入到我们现有的具身智能机器人项目里。

趁着下班的空闲时间,我一头扎进了资料调研里,原本以为只是一次常规的技术适配分析,可越深入了解,心里的疑问和思考就越多,也慢慢捋出了一条从技术落地到行业生存的完整思路。
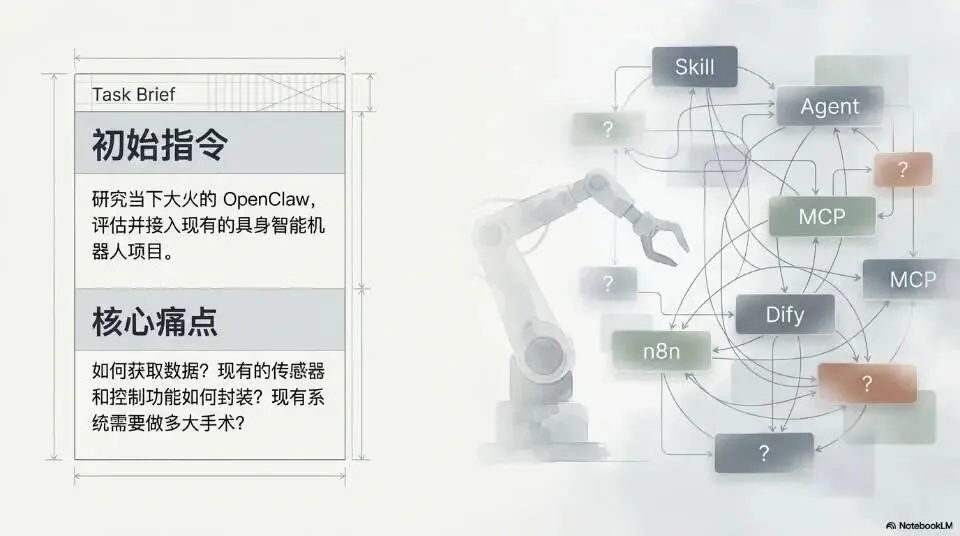
最开始,我只聚焦在最实际的问题上:OpenClaw 到底该怎么接入我们的机器人?它支持哪些数据获取方式,我们现有的传感器、控制功能,又该怎么封装成它能用的工具?我翻了很多使用案例,发现平时大家用 OpenClaw,都是去技能市场找对应的 Skill,写文案、做 PPT 都要装专属技能,我一开始也误以为,做机器人也得挨个自定义 Skill,才能实现对应的功能。
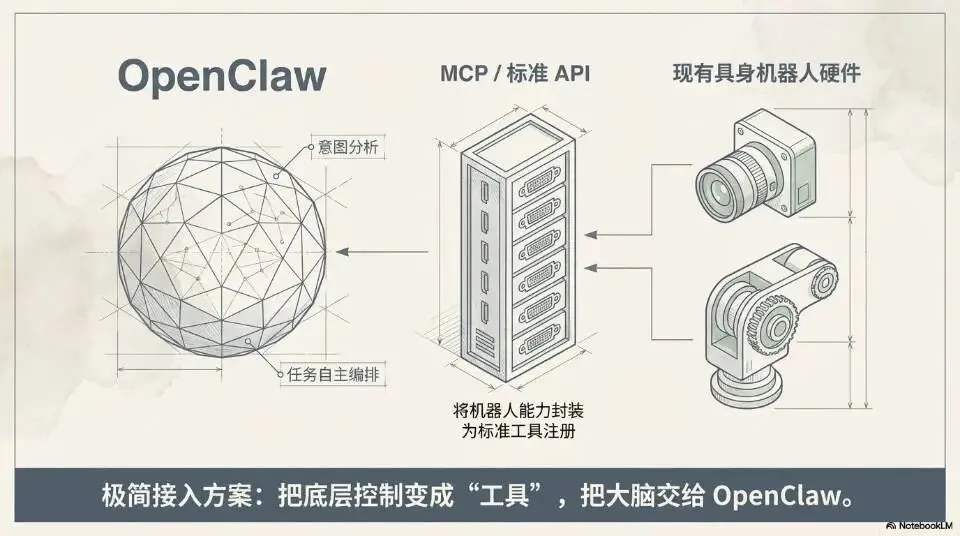
可随着调研慢慢深入,我把 OpenClaw 和 Dify、n8n 这些同类平台放在一起对比,又彻底理清了 Skill、Agent、MCP 这几个核心概念的区别,才突然想通了关键。Skill 只是预设好的固定工作流,而 OpenClaw 本质是 Agent 智能体,我们根本不用费劲去写 Skill,只需要把机器人的传感器、运动控制这些能力,封装成标准 API 注册成工具,它就能自主分析意图、编排任务、调用接口,完全不用我们提前定好流程,现有机器人框架也几乎不用改动,这个发现让我一下子明确了落地的核心方向。

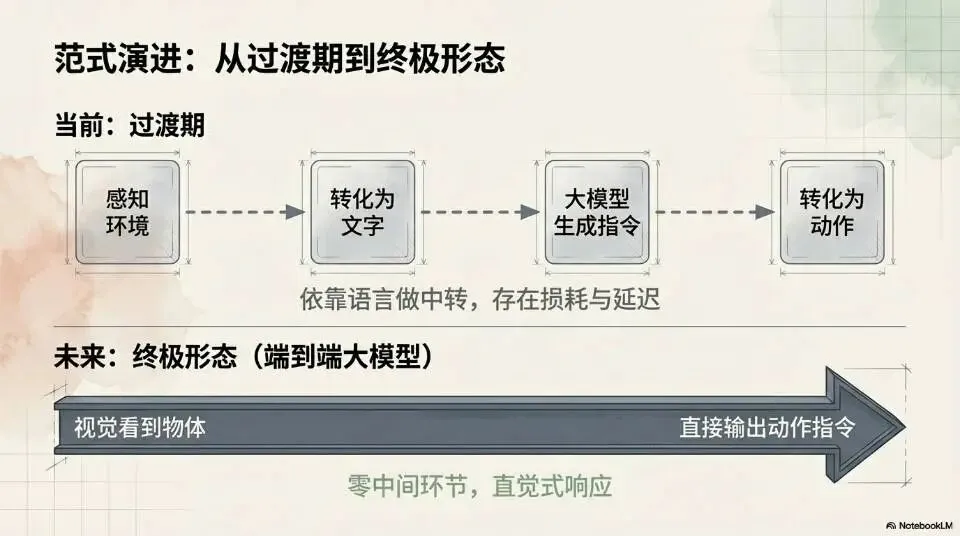
本以为技术方案敲定就结束了,可我又忍不住往更远的方向想,现在我们做的这套方案,说到底还是行业的过渡阶段。当下的具身机器人,都要靠语言做中转,感知转文字、指令再转动作,而真正的下一代,是端到端大模型,看到物体就能直接输出动作指令,不用任何中间环节,特斯拉、谷歌这些大厂,都在全力攻坚这个方向。
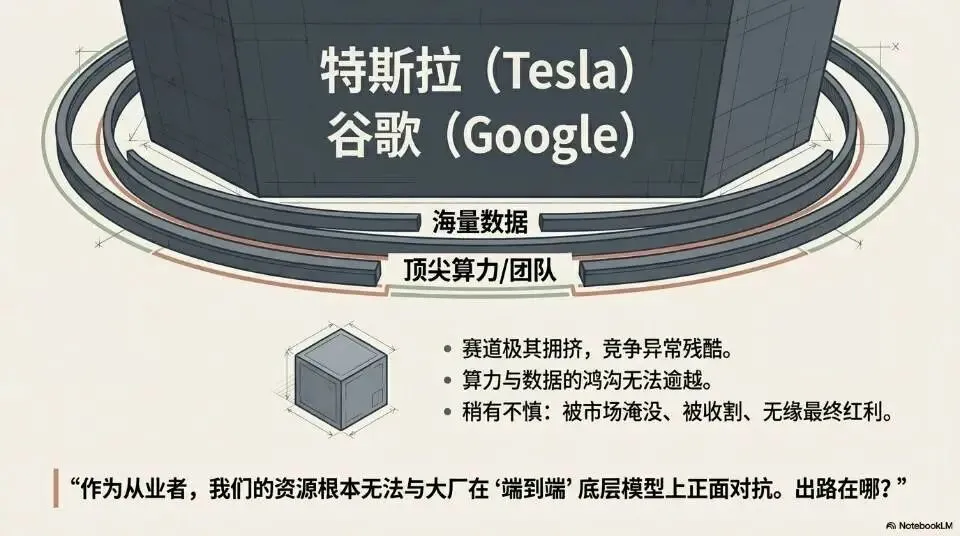
想到这里,我心里满是担忧和迷茫。作为深耕具身机器人的从业者,我们的资源和实力,根本没办法和这些大厂比拼端到端大模型的研发,他们有海量的数据、顶尖的技术团队,赛道竞争异常激烈,稍有不慎,就可能被激烈的市场淹没,甚至被收割,很难走到最后分享市场红利的那一步。
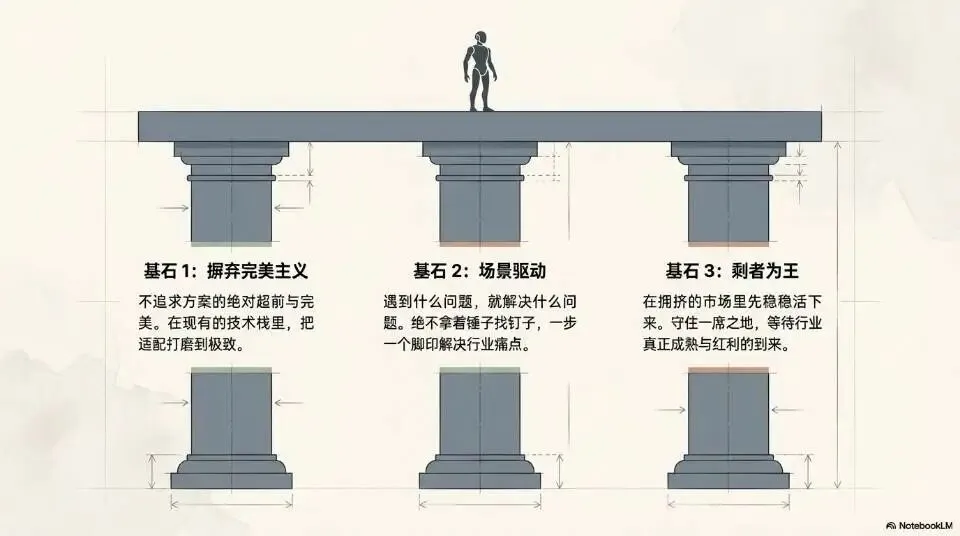
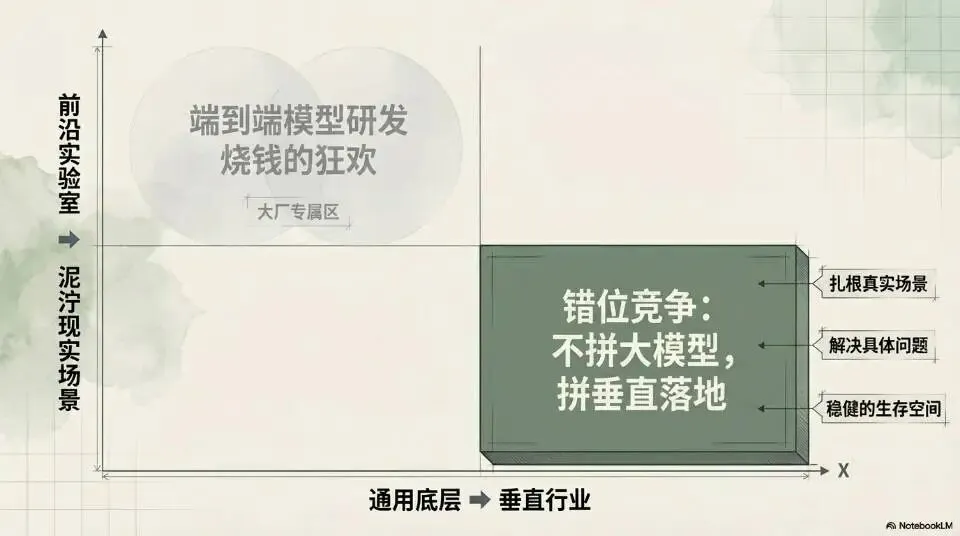
在这样的焦虑里,我开始沉下心反思:既然拼不了顶尖的模型研发,那我们的出路到底在哪里?其实答案很清晰,我们不去跟风追逐大厂的赛道,而是扎根垂直领域,找好属于我们自己的生存定位。我们不追求方案有多完美、多超前,而是扎根在真实的落地场景里,场景里遇到什么问题,我们就解决什么问题,一步一个脚印打磨适配方案,先稳稳地活下去,在拥挤的市场里守住自己的一席之地,等到行业成熟、市场红利到来的时候,我们依然能在场。

想通这些,我也不再迷茫,更明白了我们义无反顾做这件事的意义。我们不是要做出多么颠覆行业的产品,而是依托自己现有的能力,踏踏实实做落地、做深耕,一方面能带动身边的就业,另一方面,也能为具身智能这个新兴行业,贡献一点属于我们的微薄力量。哪怕只是在落地场景里解决一个小问题,哪怕只是为行业积累一点实战经验,都是有价值的。
这次关于 OpenClaw 的调研,不仅敲定了技术落地的方案,更让我看清了行业方向和自身的定位。不盲目跟风,不畏惧竞争,扎根场景,踏实做事,守住初心,就是我们在这个行业里,最坚定的前行方向。