 夜雨聆风
夜雨聆风我们普通民众目前可以接触到具身智能主要是智能汽车,然后会见过电视上略微智障的AI机器人,最顶配的科幻,无疑是复仇者联盟里面钢铁侠的智能战甲。今天这篇文章从具身智能的核心技术“运动控制来给你拆解一下具身智能的研发难度分级。让你明白具身智能目前其实在干嘛。

一、具身智能运动控制:5层难度天梯(从易到极难)
具身智能不仅仅是让机器“会思考”,而是让机器“会动、能稳、可适应物理世界”。
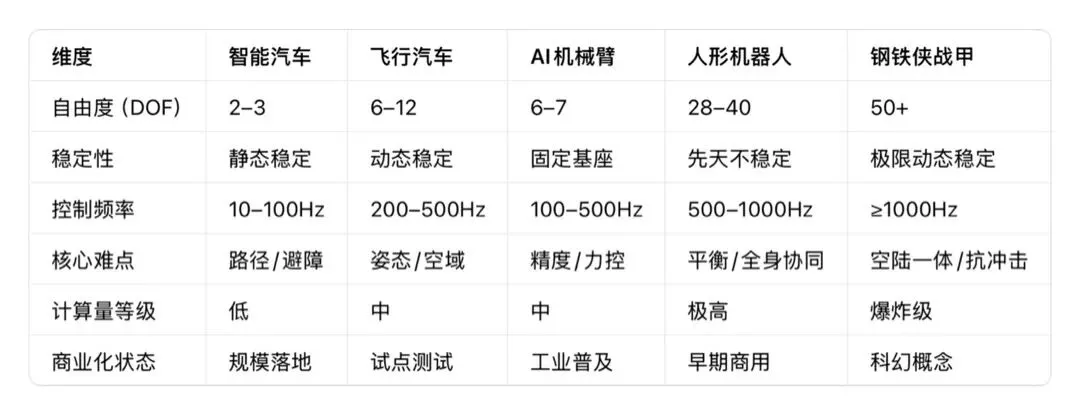
运动控制的复杂度,直接决定了智能体的能力天花板。而具身智能的自由度越高、环境越不可控、平衡越脆弱,控制难度指数级爆炸。我们把主流形态放在同一标尺上对比,让你更好理解
1. 智能汽车(难度:★☆☆☆☆)
• 结构:4轮刚性底盘,2–3个自由度(转向、驱动)
• 核心:静态稳定(不会倒),运动是连续滚动,线性、约束强
• 控制:VCU+ESP/ABS,10–100Hz低频闭环,只需路径跟踪、避障
• 痛点:路况识别、交通决策,无平衡压力,感知以外部环境为主
一句话总结:抛开内部驾驶舒适度,智能汽车就是一个在平面上移动的点
2. 飞行汽车(难度:★★★☆☆)
• 结构:多旋翼/复合翼,6–12个自由度,三维空间运动
• 核心:动态稳定但有冗余,悬停/姿态调整依赖实时动力补偿
• 控制:飞控+姿态解算,200–500Hz,需抗风、防失速、三维路径
• 痛点:空管、避障、动力冗余,比汽车难但无“双足平衡”地狱
一句话总结:抛开法律法规,空管制度,飞行汽车就是一个在三维空间漂浮的点
3. AI机械臂(难度:★★★☆☆)
• 结构:固定基座,6–7个自由度,纯上肢操作
• 核心:无移动、无平衡,只需精度与力控,重复定位±0.01mm
• 控制:轨迹规划+力反馈,100–500Hz,任务结构化、环境可控
• 痛点:精密装配、柔性抓取,难度中等但场景专用
一句话总结:机械臂是有若干根棍子在控制末端的点。
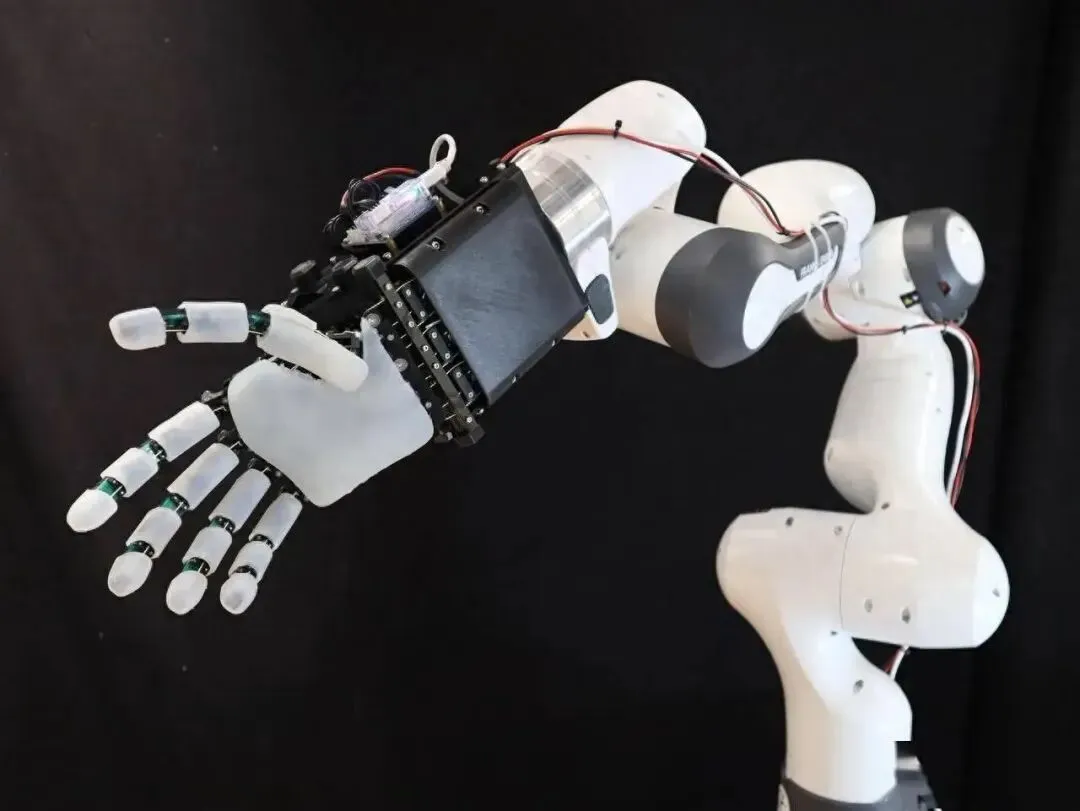
听着比较抽象,不太好理解机械臂为啥在运动控制上复杂过飞机?看一下下图就知道了:
“灵巧手”是目前AI机器人最难的部分,工业机械臂末端是钳子、是焊枪、是电钻,而机器人手臂的末端是五根手指,相当于在一个大的机械臂末端装了五条小的机械臂。
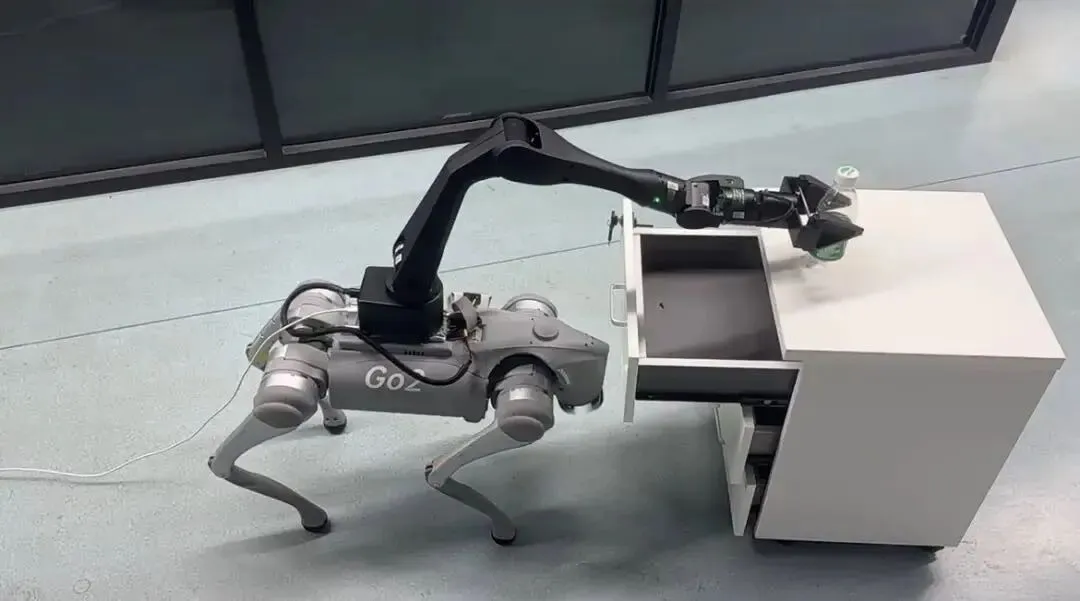
4. 智能机器人(人形/双足,难度:★★★★★)
• 结构:28–40+自由度,双足支撑,全身动态耦合
• 核心:先天不稳定,必须主动维持平衡(ZMP/全身WBC)
• 控制:全身动力学+二次规划(QP),500–1000Hz高频闭环
• 痛点:不平地面、外力扰动、跑跳/后空翻,接触建模极难
一句话总结:它是给两个灵巧手机械臂装了运动平台的机器。
其实对于机器人,可以不需要单独装个头,摄像头、天线、收音设备可以安装在手上、身体上。
脚也不一定是人类的脚,因为它的本质是运动平台。即使是宇树科技的机器人,它的脚也不会装脚趾,因为没必要。

. 钢铁侠战甲(难度:★★★★★★ 超纲)
• 结构:人形+飞行+武器+全防护,50+自由度,空天陆一体化
• 核心:高速飞行+近战格斗+爆炸冲击+瞬间姿态修正
• 控制:亚毫秒级响应,全身力场+飞行矢量+战甲协同,极端非线性
• 痛点:物理极限、材料强度、能量密度、极端环境鲁棒性
一句话总结:会飞行的可穿戴AI机器人,增强了战甲强度。
5大智能体难度对比(一眼看懂)
二、机械复杂度导致计算量爆炸,云端大脑是10年内必由之路
人形机器人的几十个高频关节+全身动力学+多模态感知,计算量是智能汽车的100–1000倍,本地嵌入式芯片(如Jetson)完全扛不住。由此,具身智能的主流技术会分化成负责思考的大脑和负责应变的小脑,大脑在云端,而小脑在身上。
1. 大脑 vs 小脑:仿生分工与算力差
大脑(云端/超算集群)——慢思考、强智能、高算力
• 任务:VLA视觉-语言-动作大模型、世界建模、长期规划、因果推理、多机协同、技能训练
• 频率:10–20Hz(低频、重计算)
• 算力:P级Flops,GPU/TPU集群,千亿–万亿参数模型
• 数据:全局地图、海量训练数据、跨机器人知识共享
小脑(机器人端侧/边缘)——快执行、稳控制、低延迟
• 任务:实时步态、关节力矩、力触觉反馈、平衡修正、局部避障
• 频率:500–1000Hz(亚毫秒级响应)
• 算力:轻量实时芯片(ARM/x86 RT),百万–亿级参数
• 约束:低功耗、小体积、强实时(延迟<5ms)
2. 为什么必须云端大脑?
• 本地算力卡死:人形机器人40+关节的全身WBC,单步QP求解需数万次运算,本地芯片发热、续航崩、算力不够
• 智能上限锁死:大模型、世界模型、强化学习训练,本地永远跑不动
• 进化效率:云端统一训练、一键更新,所有机器人同步进化;本地只能“单机笨跑”
未来10年(2026–2036),云端大脑+端侧小脑是智能机器人唯一可行路径。必须国家级云端智算基础设施(全国一体化算力网、太空计算星座)支撑“机器人大脑”,同时加速端侧“小脑芯片”(实时控制、力控、平衡算法)研发。
三、6G:2030年前后,真正打通“云端大脑→机器人身体”
1、5G不够用
带宽、时延、空天覆盖、通感一体化,撑不起人形机器人的亚毫秒、厘米级、全域覆盖需求。
2、6G的关键突破(机器人刚需)
• 通感一体:网络=雷达,实时建图、障碍物检测、厘米级定位
• 空天一体:卫星+地面+低空,全域无死角(山地、海洋、战场)
• 超低时延:端到端<1ms,同步全身关节控制
• 超大带宽:4K/8K视觉+点云+力控数据,并发传输
根据国家公开的信息,6G的商业化与普及时间如下:
• 2025–2027:6G标准制定、技术验证
• 2028–2029:首个6G商用规范完成,工业/园区试点
• 2030年前后:6G规模化部署,“6G+人形机器人”进入服务、家庭、公共场景
• 2030年后:家用机器人普及,全域智能体协同成为常态
彩蛋:智能机器人能“解放台湾”吗?
很多人畅想如果2030 家庭AI机器人普及,那么军用的机器人应该接近钢铁侠战甲了吧?那用钢铁侠完成台湾的收复,可能吗?
先说结论:技术上完全不可行,核心卡在6G+卫星体系的底层逻辑。
1. 为什么机器人/战甲上不了台海战场?
• 6G再快,也依赖卫星+地面协同:6G是空天一体化,但必须地面基站+低轨卫星+高轨卫星+终端协同,缺一不可
• 台海电磁战/反卫星压制:战时美军+台军会全频段干扰、反卫星打击、切断星间链路,6G网络瞬间瘫痪,机器人=瞎子聋子:失去云端大脑、失去定位、失去通信,再强的机器人也会当场瘫痪、失控、自毁
• 极端环境不可控:海战、登陆、巷战、爆炸冲击、复杂楼宇,远超当前机器人极限;钢铁侠战甲的能量、材料、控制全是科幻,20年内无可能
补充知识:卫星四大核心领域(看懂就懂为什么不行)
卫星是6G的“天基底座”,核心四大领域:
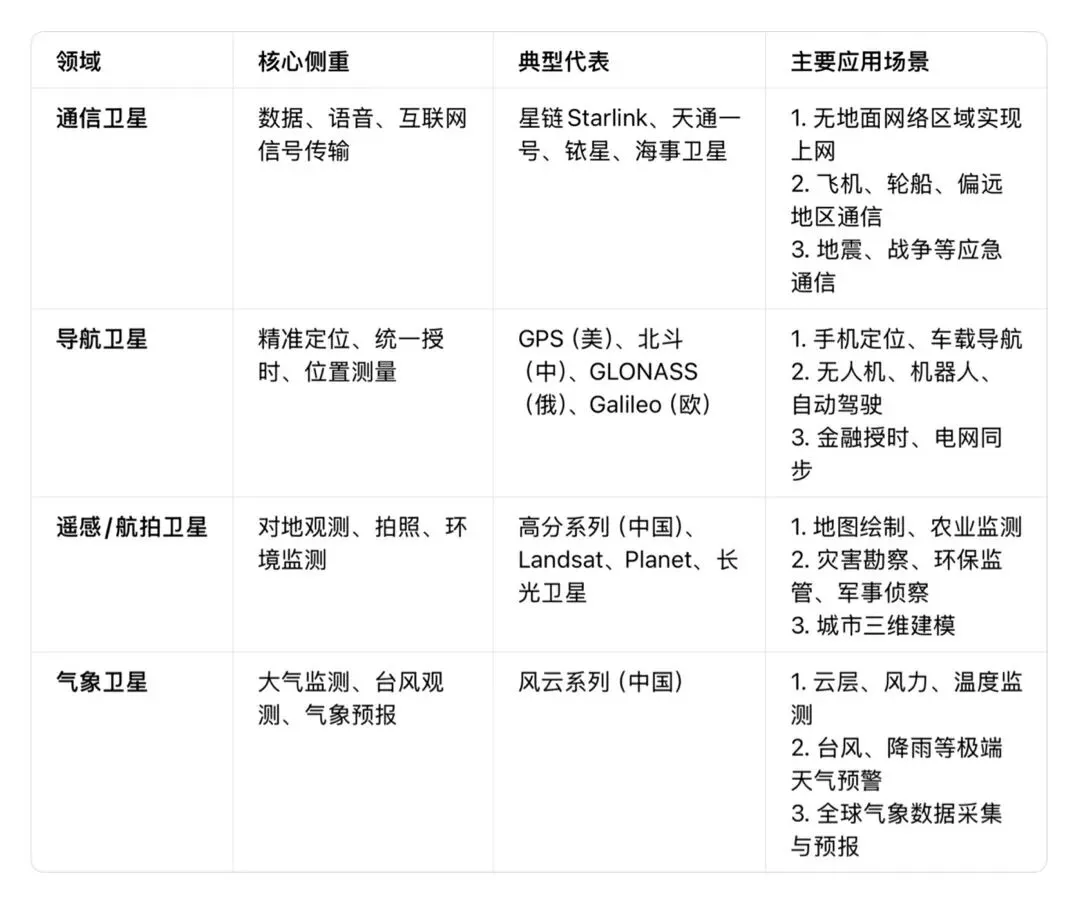
星链、GPS、北斗、航拍卫星 到底干嘛的?
1. 星链 Starlink(美国 SpaceX)= 天上的移动/联通/电信
• 只做:通信、上网
• 不做定位、不拍照
• 本质:把基站搬到天上
2. GPS(美国)= 天上的尺子 + 钟表
• 只做:定位、导航、授时
• 不提供上网、不拍照
3. 北斗(中国)= 增强版 GPS + 一点通信能力
• 主业:定位、导航、授时(比GPS精度更高)
• 特色:短报文通信(没手机信号也能发消息)
4. 航拍/遥感卫星= 天上的高清摄像机
• 只拍地球,不通信、不定位
• 拍回来给科研、政府、企业用
三类卫星信号路径完全不同
1. 导航卫星(GPS/北斗)
路径:卫星 → 单向广播 → 你的设备
• 只发不收
• 你只“听”位置信号
• 延迟高,但不需要联网
2. 通信卫星(星链)
路径:你的设备 → 卫星 → 地面站 → 互联网 → 对方
• 双向传输
• 要“天上一跳”
• 延迟比地面 5G 高,但比传统卫星低很多
3. 遥感卫星
路径:卫星拍照 → 飞过中国上空 → 下传数据到地面接收站
• 不是实时通信
• 是“拍完再传”
6G 的三大主体
1. 地面基站(90% 流量)
城市、人口密集区,还是靠地面 6G 基站
2. 低空通信(无人机、飞艇)
3. 卫星(只做补充)
覆盖海洋、沙漠、偏远地区、飞机、船舶
一句话:6G 是地面为主,卫星为辅
6G时代,卫星和机器人的关系
• GPS/北斗:给机器人定位
• 星链/卫星通信:没地面网时联网
• 遥感卫星:给地图、环境建模
• 6G:地面超低时延,让机器人更聪明
