 夜雨聆风
夜雨聆风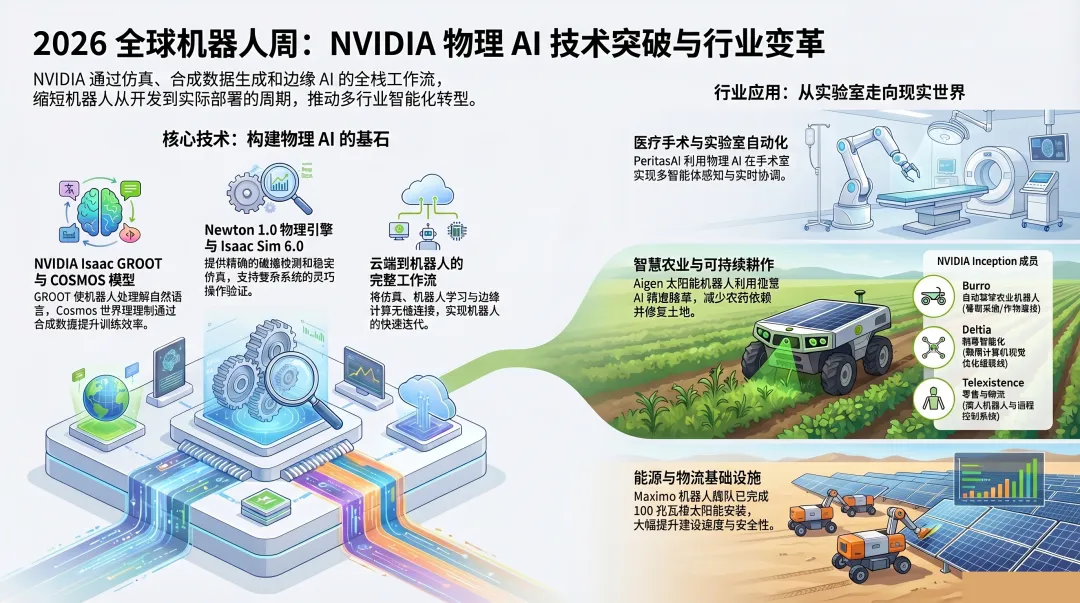
核心观点
2026 年 4 月的国家机器人周(National Robotics Week),NVIDIA 用一系列密集发布勾勒出物理 AI(Physical AI)的完整技术蓝图。剥开产品发布的外壳,三个核心主张浮出水面:
机器人开发正在从"逐行编码"走向"开口即得"。 Isaac GR00T 开放模型让机器人通过视觉-语言-动作(VLA)推理理解自然语言指令,NemoClaw 则将文本直接翻译为可执行的 Python 脚本。开发范式的转变意味着,机器人编程的门槛正在从"会写代码"降低到"会说话"。
"仿真先行"(Simulation-first)不再是口号,而是工程事实。 Newton 1.0 物理引擎正式 GA、Isaac Sim 6.0 与 Isaac Lab 3.0 同步推出、Cosmos 世界基础模型(WFMs)大规模生成合成数据——从物理逼真到像素逼真再到感官逼真,NVIDIA 正在构建一个"数字健身房",让机器人在虚拟世界中完成百万次零风险试错后再走进现实。
物理 AI 的商业化已经不是"将来时",而是"进行时"。 从 Maximo 完成 100MW 级太阳能安装到 PeritasAI 进入手术室,从 Doosan Robotics 的智能码垛到 Aigen 的太阳能除草机器人——这些不是概念演示,而是正在产生经济效益的真实部署。
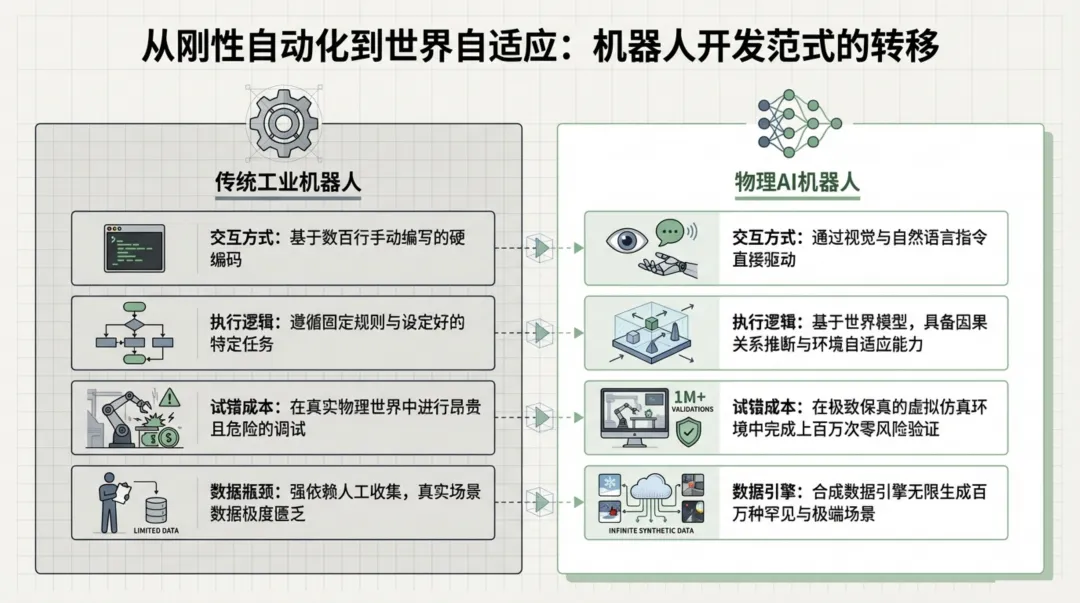
从传统工业机器人到物理 AI 机器人,交互方式、执行逻辑、试错成本和数据来源都发生了根本性转变。传统机器人依赖数百行手动编码和固定规则;物理 AI 机器人则通过视觉与自然语言指令直接驱动,基于世界模型具备因果推断和环境自适应能力。
深度剖析
云-边-端三层架构:物理 AI 的技术全栈
NVIDIA 这次发布的核心不是某一款产品,而是一套从底层到顶层完整贯通的技术栈。
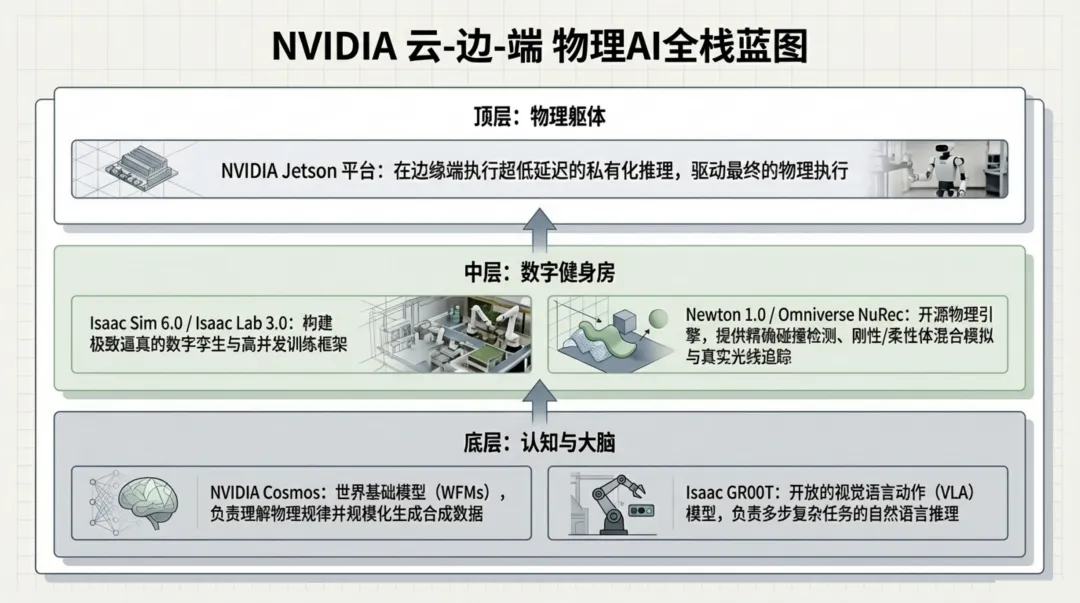
底层:认知与大脑。 NVIDIA Cosmos 世界基础模型负责理解物理规律并规模化生成合成数据;Isaac GR00T 则提供开放的视觉语言动作模型,负责多步复杂任务的自然语言推理。这一层解决的核心问题是:让机器人"理解世界"。
中层:数字健身房。 Isaac Sim 6.0 和 Isaac Lab 3.0 构建极致逼真的数字孪生与高并发训练框架;Newton 1.0 作为开源物理引擎,提供精确碰撞检测、刚性/柔性体混合模拟以及真实光线追踪。这一层解决的核心问题是:让机器人在部署前"练到极致"。
顶层:物理躯体。 NVIDIA Jetson 平台在边缘端执行超低延迟的私有化推理,驱动最终的物理执行。从 Jetson Orin 到 Jetson AGX Thor,算力逐级提升,支撑从农业漫游机器人到人形家务机器人的端侧部署。
这三层架构的价值在于打通了一个完整闭环:在云端用世界模型生成海量合成数据 -> 在仿真环境中进行大规模策略训练 -> 在边缘设备上实时推理执行。任何一个环节的缺失都会让整条链路断裂,而 NVIDIA 目前是唯一一家在三层全部布局的玩家。
世界模型:让机器人掌握物理因果
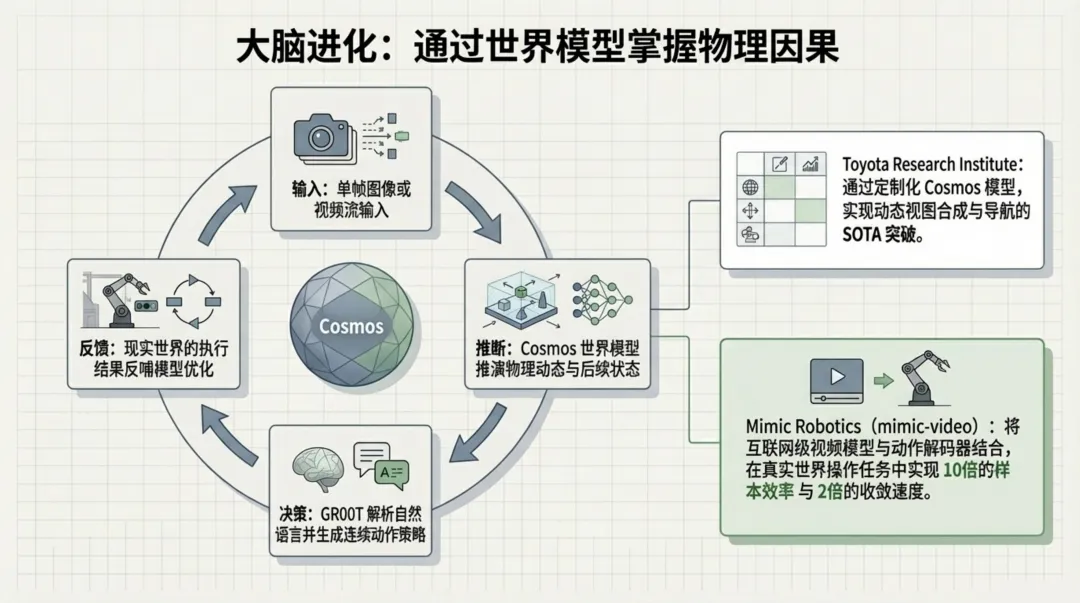
Cosmos 世界模型的意义远不止"生成合成数据"这么简单。其核心能力是让机器人理解物理因果关系——输入单帧图像或视频流,Cosmos 可以推演物理动态及后续状态,而 GR00T 则根据推演结果解析自然语言并生成连续动作序列。
两个合作伙伴的成果特别值得关注:
丰田研究院(TRI) 通过定制 Cosmos 模型,在动态视图合成与导航领域取得了 SOTA 突破。这意味着世界模型已经可以精确预测机器人在三维空间中移动时将看到的场景变化,从根本上减少了对真实世界数据的依赖。
Mimic Robotics 推出的 mimic-video 动作模型更加激进:它将预训练的互联网规模视频模型与流匹配动作解码器配对,替代了传统 VLA 中静态的图像-语言骨干网络。结果是在真实世界操作任务中实现了 10 倍的样本效率提升和 2 倍的收敛速度。换言之,过去需要 1000 次演示才能学会的任务,现在只需要 100 次。
跨越虚拟鸿沟:从像素逼真到物理逼真
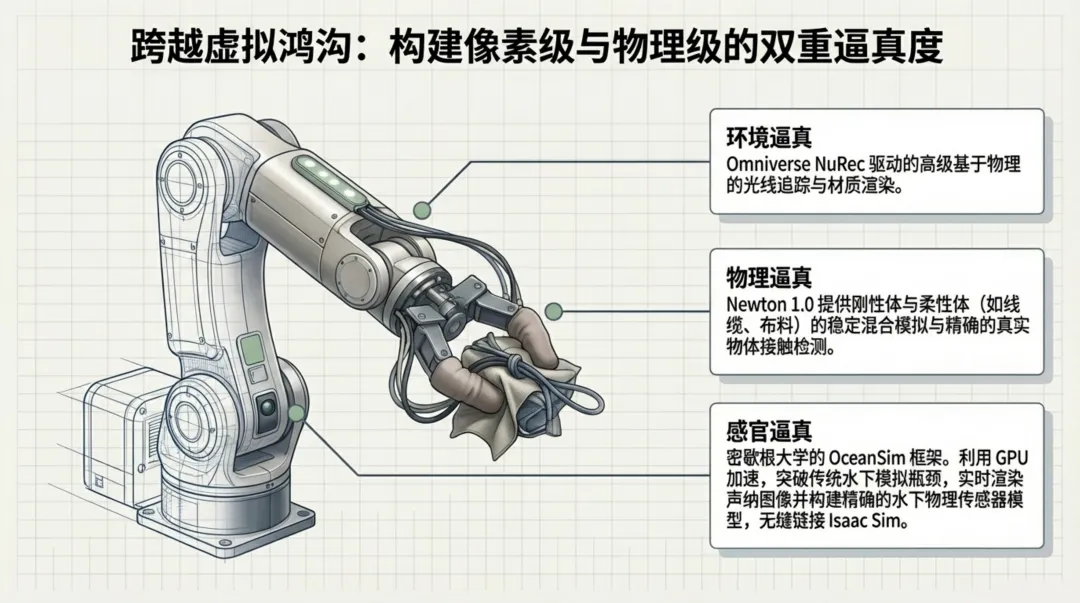
"仿真到现实"(Sim-to-Real)的迁移一直是机器人领域最大的痛点之一。NVIDIA 这次从三个维度同时发力:
环境逼真:Omniverse NuRec 驱动的高级光线追踪与材质渲染,确保视觉层面的保真度。 物理逼真:Newton 1.0 提供刚性体与柔性体(如线缆、布料)的稳定混合模拟,以及精确的物体接触检测。这对于灵巧操作(如手术器械控制、精密装配)至关重要。 感官逼真:密歇根大学的 OceanSim 框架利用 GPU 加速,突破了传统水下模拟器的瓶颈,实时生成合成图像和成像声呐数据,构建精确的水下物理传感器模型。
从编码到对话:NemoClaw 的范式革命
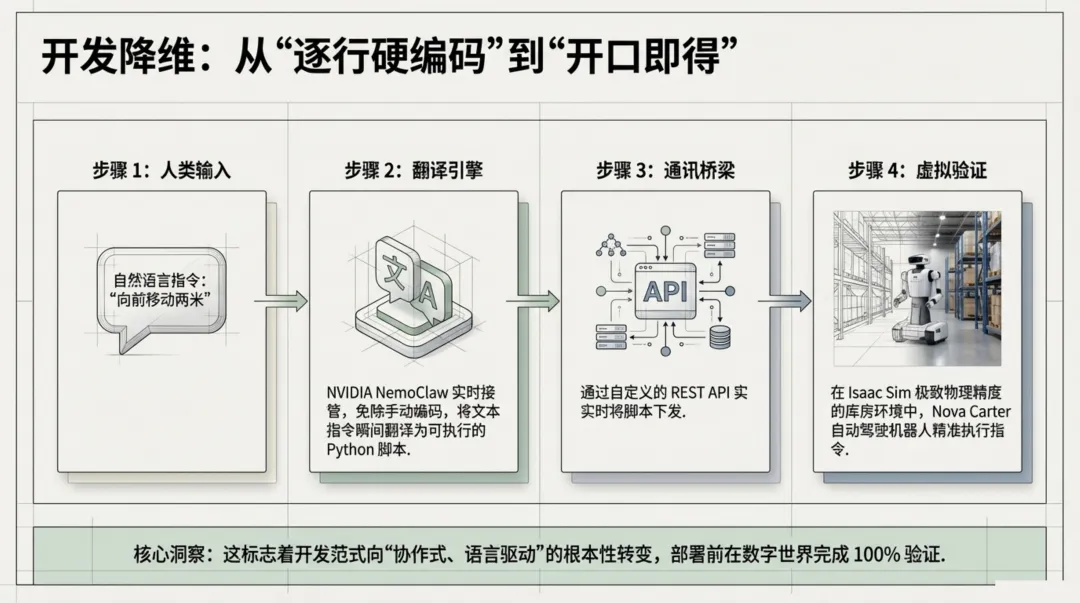
NemoClaw 的技术路径清晰而优雅:人类输入自然语言指令(如"向前移动两米")-> NemoClaw 实时翻译为可执行的 Python 脚本 -> 通过自定义 REST API 实时下发 -> 在 Isaac Sim 物理精确的虚拟环境中验证执行。整个过程中,开发者无需手动编写任何机器人控制代码。
这标志着开发范式从"命令式编程"向"协作式、语言驱动"的根本性转变。在部署前于数字世界完成 100% 验证,大幅降低了真实世界测试的安全风险和时间成本。
策略检验:通用机器人的三级漏斗
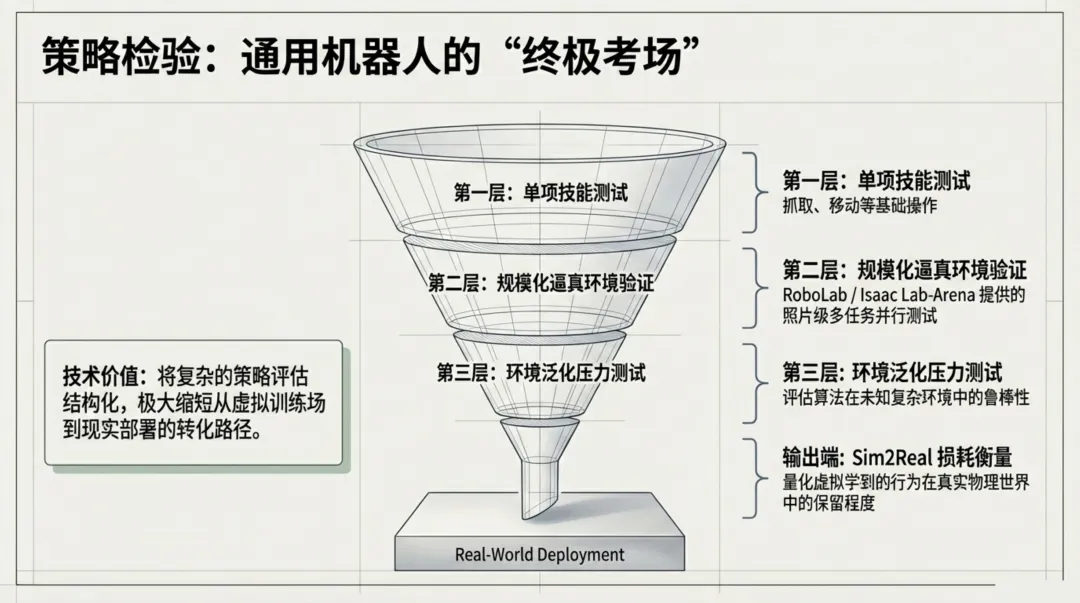
RoboLab 基准提出了一个结构化的策略评估框架,将通用机器人的能力验证分为三个层级:
第一层:单项技能测试 — 抓取、移动等基础操作的精度验证 第二层:规模化逼真环境验证 — 通过 RoboLab / Isaac Lab-Arena 提供的照片级真实场景,进行多任务并行测试 第三层:环境泛化压力测试 — 评估策略在未知复杂环境中的鲁棒性
最终输出的 Sim2Real 损耗衡量指标,量化了虚拟学习到的行为在真实物理世界中的保留程度。这套漏斗模型的价值在于:将复杂的策略评估结构化,极大缩短了从虚拟训练场到现实部署的转化路径。
行业落地:物理 AI 的四个前沿战场
智能物流:从"无视规则"到"物理常识"
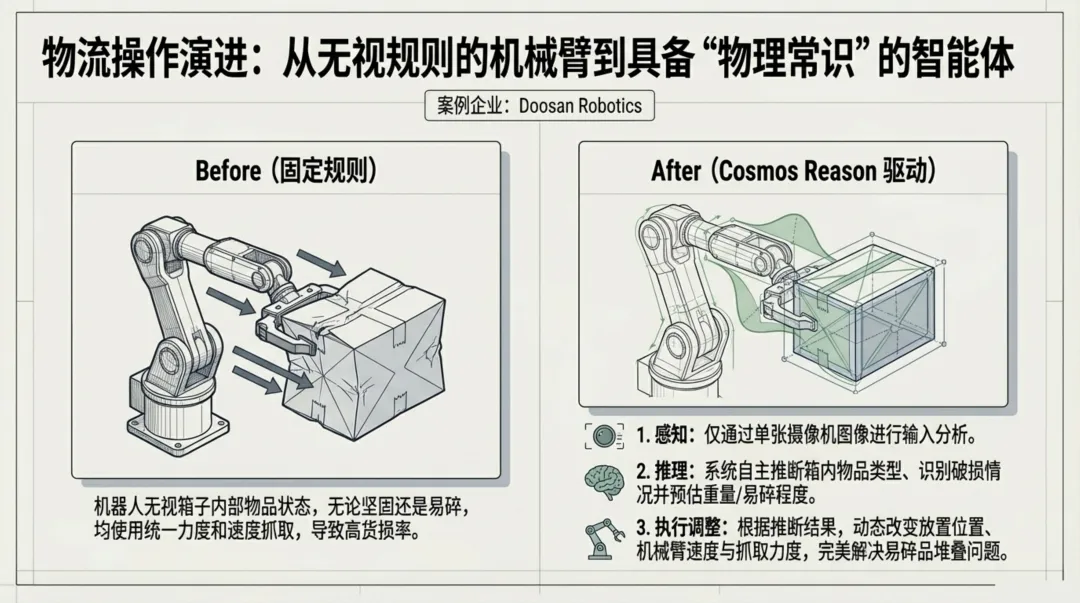
Doosan Robotics 的案例完美诠释了 Cosmos Reason 的实际价值。传统码垛机器人对所有箱子"一视同仁"——无论内容物坚固还是易碎,一律使用统一的力度和速度抓取,导致频繁的货物损坏。而集成 Cosmos Reason 后,系统仅通过单张摄像机图像就能完成三步推理:感知(输入分析)-> 推理(判断物品类型、检测损坏、估算重量和易碎程度)-> 执行调整(动态改变放置位置、机械臂速度与抓取力度)。
这是"具备物理常识的智能体"的一个教科书式案例:机器人不再盲目执行预设规则,而是根据对物理世界的理解来自适应调整行为。
高精度医疗:手术室里的多智能体协同
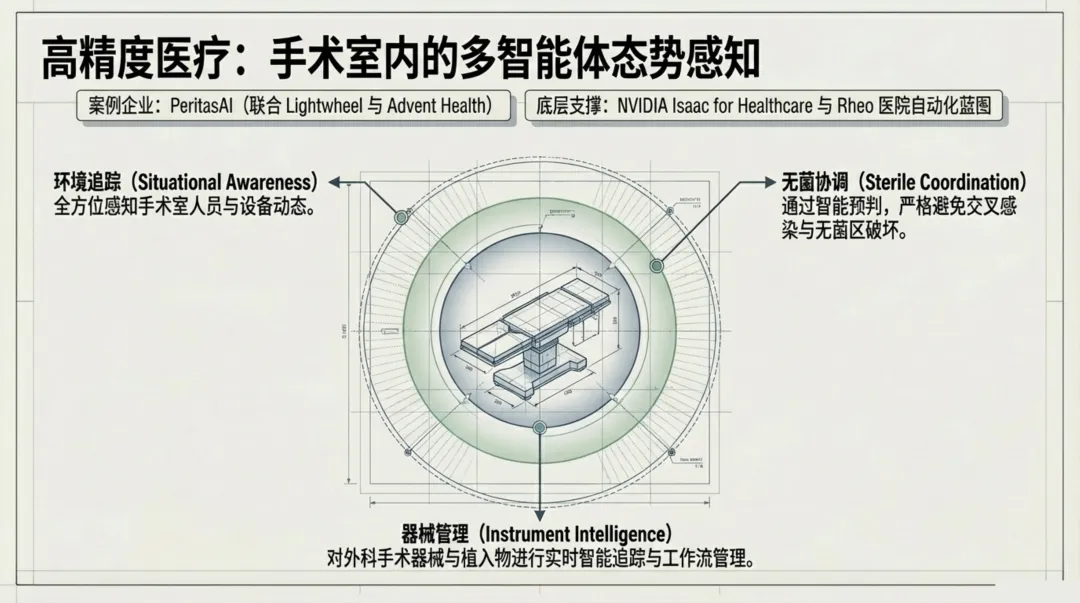
PeritasAI 联合 Lightwheel 和 Advent Health 医院系统,基于 NVIDIA Isaac for Healthcare 和 Rheo 医院自动化蓝图,正在构建手术室内的多智能体 AI 系统。该系统覆盖三大能力域:环境追踪(Situational Awareness)全方位感知手术室人员和设备动态;无菌协调(Sterile Coordination)通过智能预判严格避免交叉感染;器械管理(Instrument Intelligence)对手术器械与植入物进行实时追踪与工作流管理。
在所有物理 AI 的应用场景中,手术室是对精度、延迟和安全性要求最极端的一个,PeritasAI 的进展说明技术已具备进入最严苛环境的能力。
基础设施:机器人舰队重塑太阳能产业
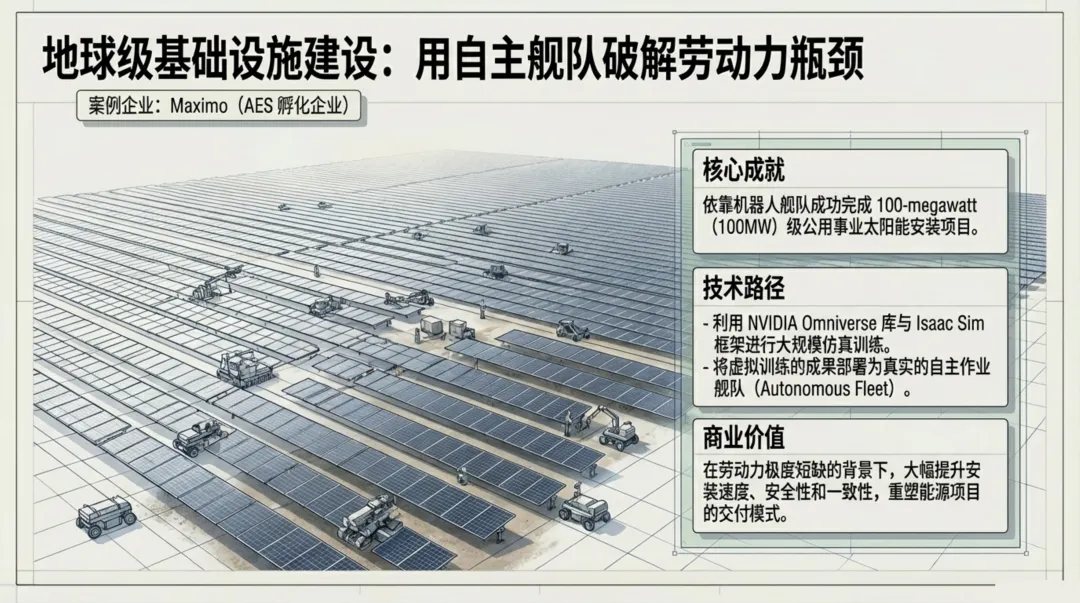
Maximo(AES 公司孵化企业)用机器人舰队成功完成了 100MW 级公用事业太阳能安装项目。技术路径上,他们利用 NVIDIA Omniverse 库与 Isaac Sim 进行大规模仿真训练,然后将虚拟训练的成果部署为现实世界的自主作业舰队。
在劳动力极度短缺的可再生能源安装领域,这一成果具有标杆意义——它证明了 AI 驱动的现场机器人不仅是概念验证,而是能在劳动力短缺的现实约束下大幅提升安装速度、安全性和一致性的实用解决方案。
再生农业:太阳能漫游车的精准除草
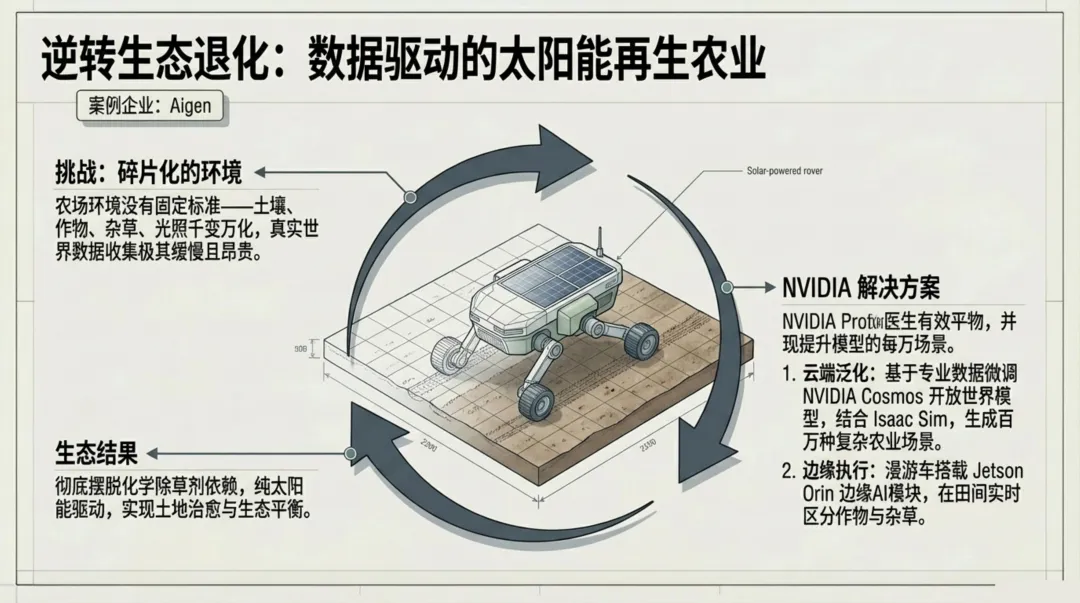
Aigen 的太阳能驱动自主漫游机器人面对的是物理 AI 中最具挑战性的环境类型之一——极度碎片化的非结构化场景。农场的土壤、作物、杂草、光照千变万化,真实世界数据收集极其缓慢且昂贵。
NVIDIA 的解决方案分为两层:云端泛化——基于专业数据微调 Cosmos 开放世界模型,结合 Isaac Sim 生成百万种复杂农业场景;边缘执行——漫游车搭载 Jetson Orin 边缘 AI 模块,在田间区分作物与杂草,实时决策并执行物理除草操作。最终生态效果是彻底摆脱化学除草剂依赖,实现纯太阳能驱动的土地治愈与生态平衡。
我们的视角
值得肯定的方向
全栈整合的护城河效应。 NVIDIA 目前在物理 AI 领域的最大优势不是任何单一产品,而是从芯片(Jetson)到仿真(Isaac Sim)到模型(Cosmos/GR00T)到部署工具的端到端整合能力。这种垂直整合在 GPU 计算时代帮助 NVIDIA 建立了在深度学习训练市场的统治地位,现在它正在机器人领域复制同样的策略。对开发者来说,一旦进入这个生态,切换成本极高。
开源策略的精准卡位。 Newton 1.0、Isaac GR00T 选择开源,是一个经过深思熟虑的战略决策。通过开源基础设施层吸引开发者和学术界,同时在上层仿真平台和算力硬件上保持商业化——这与 Google 开源 Android 同时垄断移动广告市场的逻辑如出一辙。
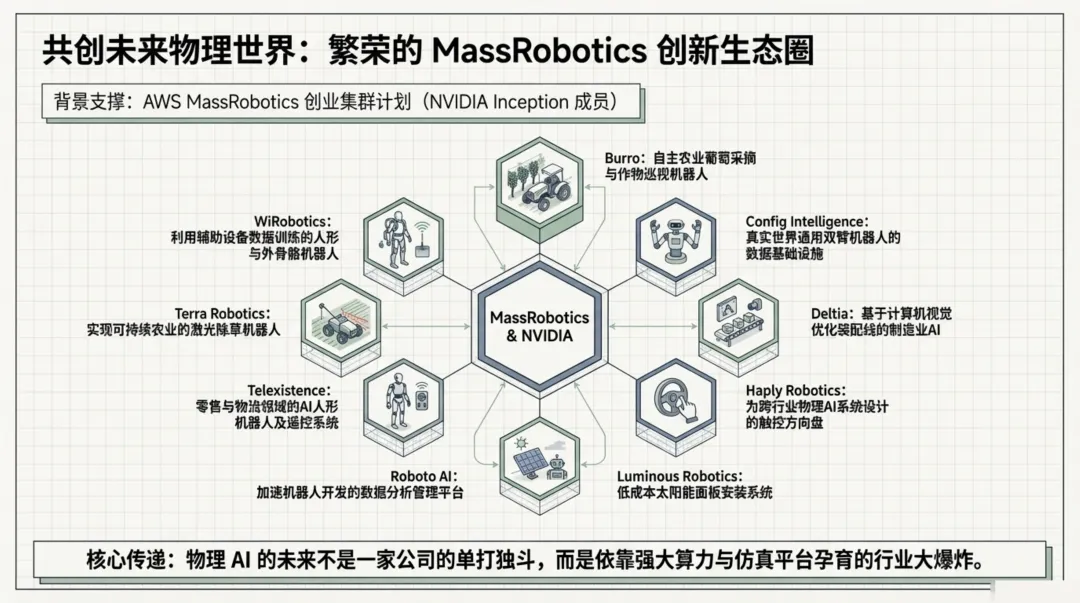
MassRobotics 与 AWS 奖学金计划中涌现的初创企业——从 Config Intelligence 的双臂机器人数据基础设施到 Haply Robotics 的触觉控制设备——说明生态已经从 NVIDIA 单点辐射扩展为多节点网状结构。物理 AI 的未来不是一家公司的独角戏,而是依靠强大算力与仿真平台孕育的行业大爆炸。
值得商榷的地方
MuJoCo-Warp 70 倍加速的缺位令人困惑。 用户提供的摘要中提到了 Google DeepMind 合作的 MuJoCo-Warp 实现 70 倍加速,但在 NVIDIA 官方博客正文中并未找到这一信息。这一声称如果属实,将是仿真性能领域的重大突破。但缺乏官方文档支撑,建议读者对这一数字保持谨慎,等待后续技术论文或基准测试报告的验证。
Sim-to-Real 的"最后一公里"问题仍未解决。 尽管仿真保真度不断提升,但真实世界的长尾分布(罕见但关键的边缘情况)在仿真中仍然难以穷尽。RoboLab 基准提出的三级漏斗模型是一个好的框架,但其 Sim2Real 损耗指标的具体数值和适用范围还需要更多实际部署数据来验证。
"开口即得"的叙事需要降温。 NemoClaw 将自然语言转为可执行脚本的演示令人印象深刻,但目前仅限于在 Isaac Sim 虚拟环境中控制 Nova Carter 机器人执行简单导航指令。从"move two meters forward"到在非结构化真实环境中执行复杂多步操作之间,还有巨大的鸿沟。将其定位为"与机器人交谈"虽然在叙事上引人入胜,但可能会在行业中制造不切实际的期待。
行业观察
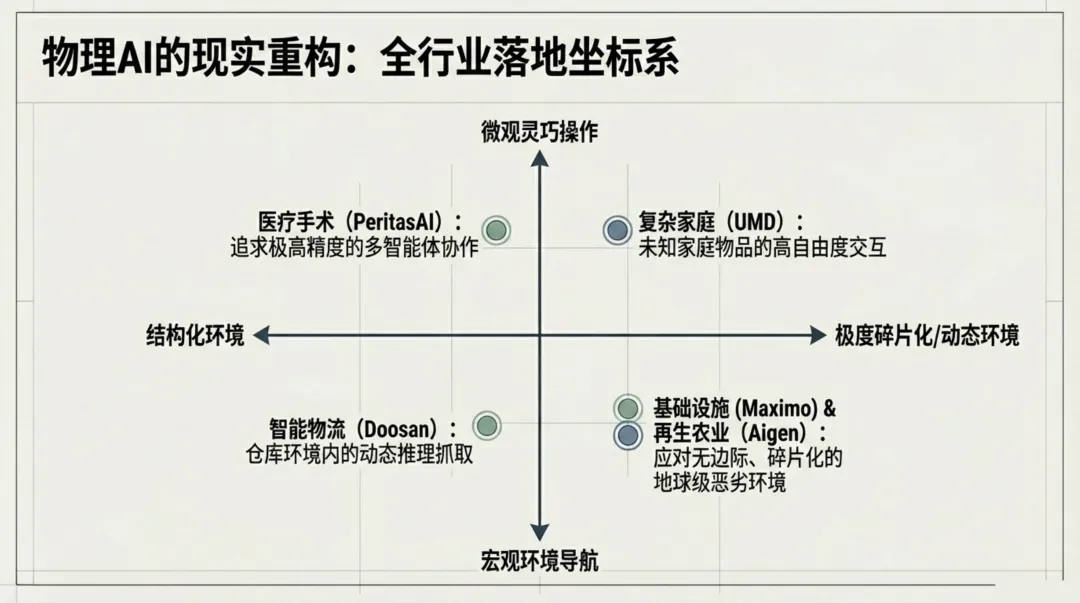
从行业落地的坐标系来看,物理 AI 的应用正在沿两个维度分化:操作精度(从宏观导航到微观灵巧操作)和环境结构化程度(从结构化工厂到极度碎片化的户外环境)。
高精度 + 结构化:PeritasAI 手术室(最高精度要求,相对结构化的环境) 高精度 + 碎片化:马里兰大学人形家务机器人(未知家庭物品的高自由度交互) 宏观导航 + 结构化:Doosan 智能物流(仓库环境内的动态推理抓取) 宏观导航 + 碎片化:Maximo 太阳能安装、Aigen 再生农业(应对无边际、碎片化的地球极恶劣环境)
这个坐标系揭示了一个有趣的趋势:物理 AI 的最早规模化落地点并不是学术界最关注的人形家务机器人,而是结构化程度较低但经济驱动力极强的能源和农业领域。
延伸阅读
NVIDIA Isaac 平台官方文档[1]:如果你是机器人开发者,这是进入 NVIDIA 物理 AI 生态的起点。文档涵盖 Isaac Sim、Isaac Lab、GR00T 模型的完整 API 参考和教程。
Mimic Robotics mimic-video 技术报告:10 倍样本效率的声称如果经得起独立复现,将是 VLA 领域的重要里程碑。值得关注后续的 arXiv 论文和开源代码。
Newton 物理引擎 GitHub 仓库[2]:作为刚刚 GA 的开源物理引擎,Newton 1.0 与 MuJoCo、Bullet 等老牌引擎的性能对比将是社区关注的焦点。如果你在做灵巧操作或软体机器人研究,值得第一时间试用。
评论基于 National Robotics Week — Latest Physical AI Research, Breakthroughs and Resources[3]。
引用链接
[1]NVIDIA Isaac 平台官方文档: https://developer.nvidia.com/isaac
[2]Newton 物理引擎 GitHub 仓库: https://github.com/NVIDIA/Newton
[3]National Robotics Week — Latest Physical AI Research, Breakthroughs and Resources: https://blogs.nvidia.com/blog/national-robotics-week-2026/
