 夜雨聆风
夜雨聆风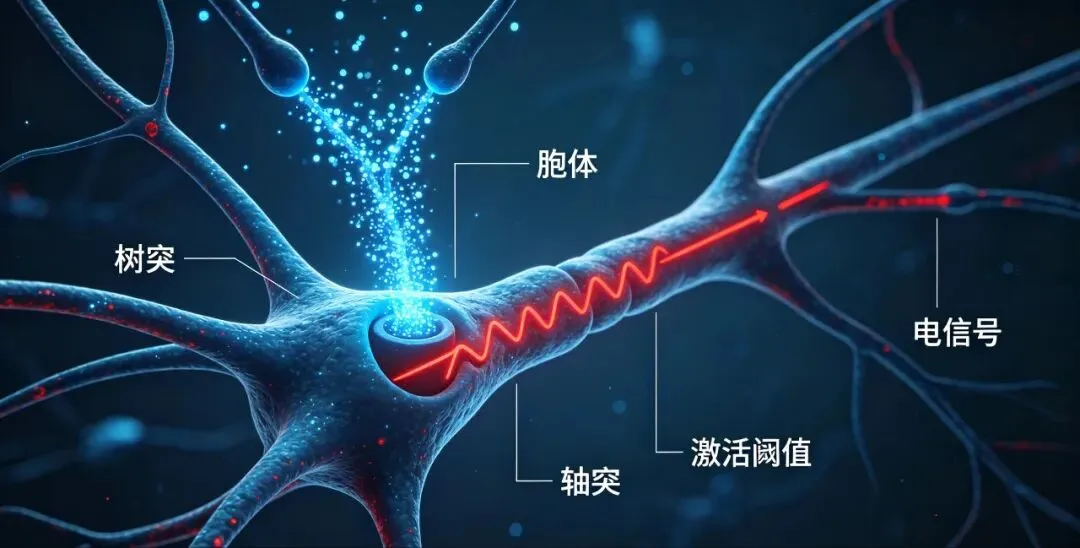

x:输入,也就是判断的依据
摄像头拍到的图片,会被拆成一个个像素点,每个像素点的明暗、颜色,就是感知机的输入x。x1、x2、x3……分别对应每一个像素点的特征。w:权重,也就是每个特征的重要程度
不同的像素点,对「是不是三角形」的影响是不一样的。图片边缘的像素点,大概率是三角形的轮廓,权重就高;图片中间的空白像素点,对判断没影响,权重就低。权重w,就是感知机给每个特征打的「重要性分数」,权重越高,这个特征对最终结果的影响越大。b:偏置,也就是判断的基础阈值
简单说,就是感知机的「判断底线」。比如我们规定,所有特征加权加起来,得分超过5,就判定是三角形,亮左边的灯;没超过5,就判定不是,不亮灯。这个5,就是偏置b。y:输出,也就是最终的判断结果
你出石头,我也出石头,平局,输出0;
你出布,我也出布,平局,输出0;
你出石头,我出布,有输赢,输出1;
你出布,我出石头,有输赢,输出1。
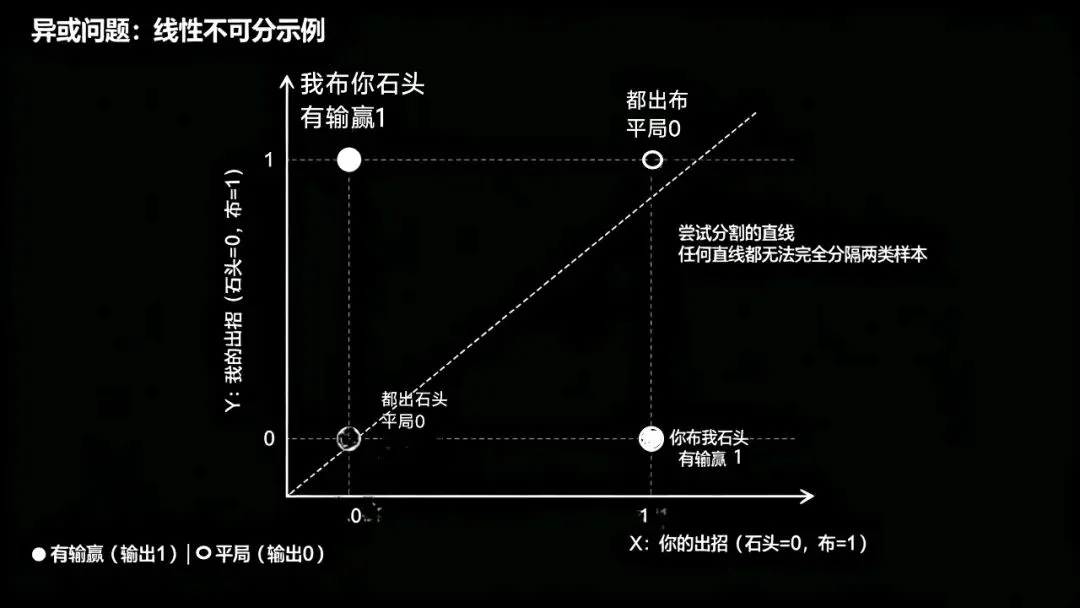
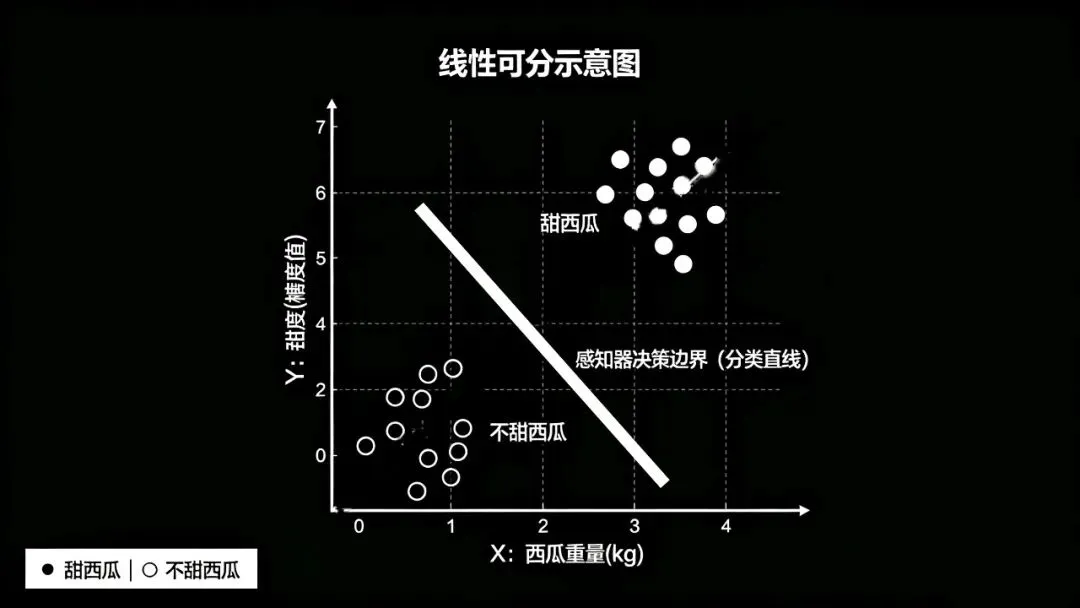
严格证明了,单层感知机,只能解决线性可分问题,永远无法处理异或这种最简单的线性不可分问题。 连最基础的逻辑运算都做不到,所谓的「通用智能」,根本就是天方夜谭。 明确指出,多层感知机,在当时的技术条件下,根本没有有效的训练方法。 哪怕理论上能解决问题,现实里也根本实现不了,只是空中楼阁。 给整个感知机研究,乃至当时的AI领域,下了一个悲观的定论: 基于感知机的神经网络研究,是一条死胡同,根本不可能实现真正的人工智能。
Rosenblatt F. The perceptron: a probabilistic model for information storage and organization in the brain[J]. Psychological Review, 1958, 65(6): 386-408.(感知机原始论文,神经网络与深度学习的奠基性研究) Minsky M, Papert S. Perceptrons: An introduction to computational geometry[M]. MIT Press, 1969.(明斯基《感知机》原著,AI发展史上的标志性著作) McCulloch W S, Pitts W. A logical calculus of the ideas immanent in nervous activity[J]. The bulletin of mathematical biophysics, 1943, 5.(MP神经元模型原始论文,感知机的理论前身) McCorduck P. Machines who think: a personal inquiry into the history and prospects of artificial intelligence[M]. A K Peters/CRC Press, 2004.(人工智能史权威著作,完整还原感知机从诞生到陨落的全过程) 尼尔·尼尔森. 人工智能的探索[M]. 机械工业出版社, 2017.(AI领域权威历史著作,梳理感知机对AI发展的核心影响) 周志华. 机器学习[M]. 清华大学出版社, 2016.(国内AI权威教材,详细阐述感知机的原理与历史意义) Goodfellow I, Bengio Y, Courville A. Deep Learning[M]. MIT Press, 2016.(深度学习领域公认权威教材「花书」,梳理感知机与神经网络的演进关系)
