 夜雨聆风
夜雨聆风面试官问你“懂不懂AUTOSAR”,你答“知道是汽车软件架构标准”,然后就没话了?
第一章 别被缩写吓住:底盘域的坐标系、命名规则与接口基础
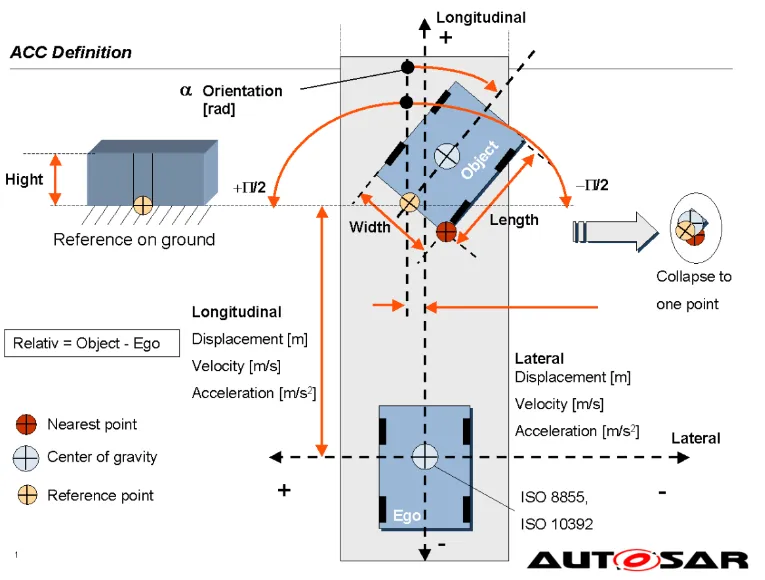
一个基础问题:车上那么多传感器、控制器互相说话,得用同一套“语言”和“空间坐标系”吧?是的,底盘域所有软件组件都遵循ISO 8855国际标准坐标系。简单记:x轴指车头方向为正,y轴指驾驶员左侧为正,z轴指车顶为正;车辆侧倾角在左转弯时车身向右倾斜为正,俯仰角在刹车时车头下沉为正。这就像学几何必须明确xy轴,否则接口数据里的“横向距离”到底以哪个点为基准就乱套了。
接口定义方法论。AUTOSAR底盘域为了统一不同OEM和供应商之间的命名习惯,专门规范了“状态”“模式”“请求”“目标”“故障”等关键词的使用规则。比如“State”指系统或实体的当前状态,“Mode”指通过诊断或驾驶员选择设置的工作模式(像悬架的舒适/运动模式),“Request”是控制器的默认目标值术语,“Fault”是导致错误的原因。根据ISO 26262功能安全标准,要用“failure”或“fault”替代“error”,因为“failure本身就是一种state”。所有端口和接口描述必须以名词开头,避免使用“信息”“指示”等模糊动词,且长名称与描述必须呼应。
对求职者来说,这些细节恰恰是面试时区分“听说过AUTOSAR”和“实际了解过AUTOSAR”的分水岭。如果你能说出“底盘域接口遵循ISO 8855坐标系统,命名上强制状态与模式的区分以避免安全歧义”,面试官会立刻意识到你具备项目落地的意识。
第二章 底盘域到底有哪些软件组件?一张结构图带你看懂功能拆分
底盘域与其他域(车身、动力总成、乘员安全、HMI)的依赖关系总览。
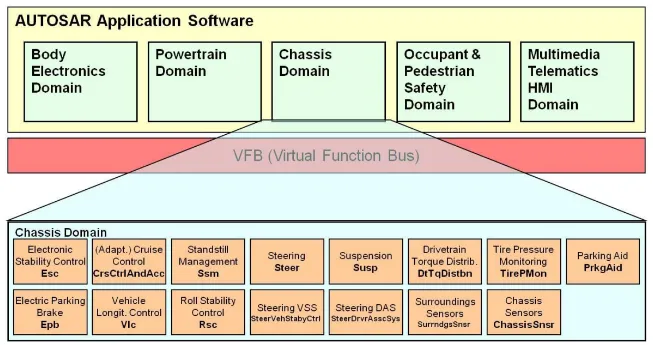
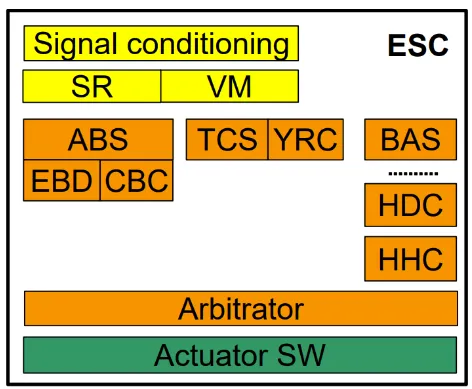
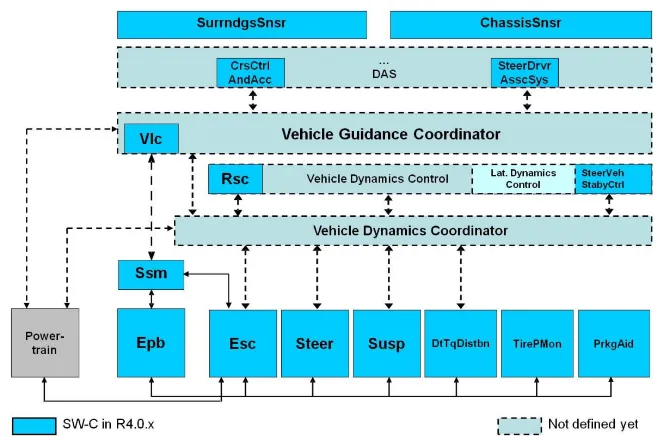
底盘域的主要任务是在应用层定义功能数据接口,其软件组件可能跨ECU分布。例如ESC(电子稳定控制)的SW-C可能不仅包含防抱死ABS、牵引力控制TCS、制动力分配EBD等子功能,还可能与SSM(静止管理器)、SteerVehStabyCtrl(转向车辆稳定控制)等组件共存于同一ECU。别误认为一个SW-C对应一个控制器,实际项目里ESC的ECU可能集成多个SW-C。
组件才是真正体现应用接口设计智慧的地方。以CrsCtrlAndAcc(巡航控制和自适应巡航)软件组合为例,它被拆解为六个子组件:AccSnsrDataFusion(ACC传感器数据融合)、AccObjTarSeln(ACC目标选择)、CrsCtrlFree(自由巡航控制)、FolwCtrlAndAArbn(跟随控制与加速度仲裁)、CrsCtrlAndAccStCtrl(状态机)、CrsCtrlAndAccObsvrForVehSt(车辆状态观测器)。这种拆分不是为了炫技,而是因为不同OEM与供应商的合作边界不同:有些项目只用单个毫米波雷达不需要传感器融合,有些仅需独立定速巡航不涉及目标选择。这正是AUTOSAR接口可伸缩性设计的体现。
再举一个面试高频考点:EPB(电子驻车制动)与ESC的三种集成形态。EPB独立式、EPB主ESC从、ESC主EPB从三种配置下,各功能(如动态拉紧、静态驻车、起步释放、防抱死干预)分别由哪个组件承担。如果你在面试中能画出这三种拓扑并解释接口差异,就能直接证明你理解车载软件架构的灵活性与安全边界。
另一个亮点是DtTqDistbn(传动系扭矩分配)组件对三种执行器——Hang-on耦合器、主动差速器、扭矩矢量分配器——的抽象建模。例如扭矩矢量装置满足:M_out1 = 1/2*(M_in + M_Diff),M_out2 = 1/2*(M_in - M_Diff),且M_out1 + M_out2 = M_in。这种数学抽象允许上层控制算法不依赖具体硬件,正是AUTOSAR应用接口“硬件无关性”原则的体现。
第三章 对象列表与信号质量:看懂接口数据元素的实战价值
如果说组件拆分是骨架,那么接口数据元素就是血肉。
DplLgt:传感器到目标纵向距离
SpdLgtRel:相对纵向速度
DynPpty:动态属性(静止/曾移动但已停止/移动中)
ObjId,目标唯一标识。每个被跟踪的目标会获得一个唯一ID,只要目标还在列表中输出,ID就保持不变;目标消失后ID可被回收重用;新目标出现的第一个周期,必须带上“新目标”标记。ID=0保留为“无目标”。这个设计解决了多目标跟踪中身份混淆的问题,也是传感器融合和上层控制算法的粘合剂。如果没有这套ID管理规则,ACC可能会把刚从盲区切进来的车和已经跟踪了五秒的前车当成两个不同物体,导致决策乱跳。
DataQly,数据质量因子。这是一个核心字段,数值会随着天气条件、目标反射率等因素下降。具体的缩放比例依赖于传感器类型和信号处理算法,因此接收方函数必须进行参数标定。这意味着,作为一个软件工程师,你不能假设DataQly=0.9就一定比0.8好一倍,而是要理解它只是一个相对置信度,实际使用时要根据项目标定量转化为决策阈值。面试中如果你能说出“DataQly需要与传感器特性联调,通常用于目标选择时的权重衰减”,面试官就知道你干过活。
特别注意DynPpty的定义:
Standing:指从未被探测到移动过
Stopped:指曾经移动但现在静止
Moving:指对地有绝对速度
这个区分对ACC跟停逻辑至关重要——必须知道前车是永久静止障碍物还是短暂停车的交通参与者。同样,ObjId的复用规则(目标消失后ID可重用,新目标首周期带“新目标”标记)直接影响跟踪算法的接口实现。
传感器信号的四个处理层级:
第一层,Raw Signal原始信号,比如直接从陀螺仪读出来的YawRate和PitchRate原始ADC值。不能作为接口被使用,因为这些信号硬件相关,换了传感器供应商接口就废了。
第二层,Base Signal基础信号,经过预处理但模型无关,抽象了传感器硬件差异。比如把原始角速度值转换为物理单位deg/s,并做了基本的温度补偿。
第三层,Standard Signal标准信号,这是AUTOSAR规范的重点。它在Base信号基础上增加了滤波、偏移补偿、基于模型的合理性校验等算法。软件组合应当将标准信号提供给其他组合,以避免各供应商重复开发相同的信号处理算法。这个理念就是AUTOSAR的复用哲学——别让每个项目都从零写一遍卡尔曼滤波器。
第四层,Fused Signal融合信号,多个传感器信号融合后的产物,比如整车速度或车身侧偏角。对于环境传感器,只标准化融合信号层,比如前面说的对象列表就是融合后的输出,而不会标准化原始雷达点云接口。
底盘域明确规定只标准化后三层接口,以此避免各供应商重复开发信号处理算法。这种分层理念对于理解车载软件分工极有价值——比如你所在团队负责传感器融合,那么输出必须是标准信号或融合信号,不能把原始ADC值直接抛给上层控制逻辑。

面试
资料
学习
路线
学习
指导
多名10年+大厂经验
工程师在线指导
学习
交流
众多开发者一起交流
助力你提升技能
