 夜雨聆风
夜雨聆风GTC 2026刚刚落幕,如果你只关注了机器人又完成了多少个高难度动作,那你可能错过了这场大会里最重要的信号:英伟达、Google DeepMind、迪士尼联合推动的Newton物理仿真引擎,正在把"训练机器人"这件事,从实验室拉进一个更接近真实世界的数字环境里。
如果你是制造业的工程师、自动化领域的技术负责人、智慧城市的方案设计者,或者只是关注AI落地进程的行业观察者——这篇文章会帮你理清一个关键问题:当行业都在讨论机器人"能不能干活"的时候,真正决定它什么时候能干活的,其实是那个隐藏在背后的数字孪生世界。
如果你读过上一期关于世界模型与数字孪生的讨论,你可能已经感受到一个趋势正在成形;而 GTC 2026,正好给了我们一个最集中的现实注脚。
01 数字孪生的角色正在被重新定义
GTC 2026释放出的信号很明确:Physical AI不是单点技术突破,而是一个系统工程。
过去几年,AI大会的中心属于大模型——参数规模、推理效率、生成质量是产业关注的主轴。机器人虽然也吸睛,但更多是"AI落地"的延伸叙事,不是决定产业格局的核心变量。
但今年,中心开始移动了。
英伟达一方面继续推进AI计算平台,另一方面把机器人仿真、Physical AI训练和世界建模推到了前台。Newton 1.0 GA在大会期间被重点释放,相关资料反复强调:接触丰富操作、移动能力、可变形物体和真实物理交互,才是机器人训练真正需要攻克的难题。
这意味着行业正在承认一个常识:让AI"会说话"与让AI"会干活",根本不是同一类问题。
前者主要面对语义空间,后者则必须面对摩擦、形变、受力、时延、误差和风险。模型可以在数字世界里犯错,但机器人在现实世界里犯错,代价往往是物体损坏、流程中断,甚至安全事故。
所以,Physical AI真正稀缺的,不是更强的"大脑",而是更可靠的"训练场"。而所谓训练场,本质上就是一个可计算、可生成、可校准、可验证、可迁移的数字世界。
数字孪生,正是在这里重新进入产业中心。
图片:GTC 2026,来源:英伟达官网
02 从"镜像"到"训练场":数字孪生的价值坐标变了
过去,数字孪生被理解为"把现实世界映射成一个数字镜像"。这个定义在工业可视化、城市治理、园区运营等阶段并没有问题,它解决的是"看得见、管得住、能联动"的问题。
但到了Physical AI阶段,仅仅"映射"已经不够了。
机器人不是来观看数字孪生的,而是要在这个数字世界里学习行动、积累经验、形成策略,然后把能力迁移到真实世界。于是,数字孪生的标准也变了:不再只是三维模型够不够真、界面够不够炫,而是这个世界能否承载训练、支撑泛化、完成验证,并最终服务现实部署。
换句话说,今天更值得追问的,不是"我们能不能把一个工厂、一间仓库、一条产线做成数字孪生",而是"这个孪生体,能不能成为机器人的学习环境、测试环境和进化环境"。
这看上去只是用途变化,实则是范式变化。
如果说传统数字孪生强调的是"表征现实",那么面向Physical AI的新一代数字孪生,更强调"生成现实中的有效经验"。它所追求的,不是一个被动展示的世界副本,而是一个能够让智能体反复试错、快速迭代、低成本学习的场景基础设施。
一个判断开始浮现:未来数字孪生的竞争,不只在于"建模能力",更在于"训模能力";不只在于"还原现实",更在于"生产可迁移能力"。
03 从GTC看:基础设施竞争已经开始了
英伟达关于Newton的公开信息强调,机器人训练需要更高质量的物理仿真,需要处理接触、材料属性、柔体和多求解器协同等复杂问题。而大会相关内容也不断把仿真、合成数据、评测和部署串成一条链路。
这条链路背后,基础设施角色的重要性正在急剧上升。
以Newton项目为例,它由英伟达、Google DeepMind和迪士尼研究共同推动,并已纳入Linux基金会体系。更值得注意的是,Lightwheel被公开写入其生态合作叙事,重点参与求解器校准、SimReady标准以及物理可信资产能力建设。
这件事的意义,不只是谁上了大会、谁出现在生态名单里,而是产业分工正在发生变化。过去,行业习惯把价值更多归于芯片、模型或终端产品;现在,越来越多企业开始意识到,决定Physical AI上限的,还包括那个隐藏在背后的世界建模能力、数据供给能力和评测验证能力。
也就是说,行业正在从"比谁的模型更聪明",转向"比谁能提供更好的训练土壤"。
这正是数字孪生从业者最不该错过的窗口。 因为数字孪生天生擅长世界表达、场景组织、多源数据融合和运行机理建模,而这些能力一旦与AI训练、仿真生成和场景验证结合,就不再只是"展示层底座",而会升级为Physical AI的"能力底座"。
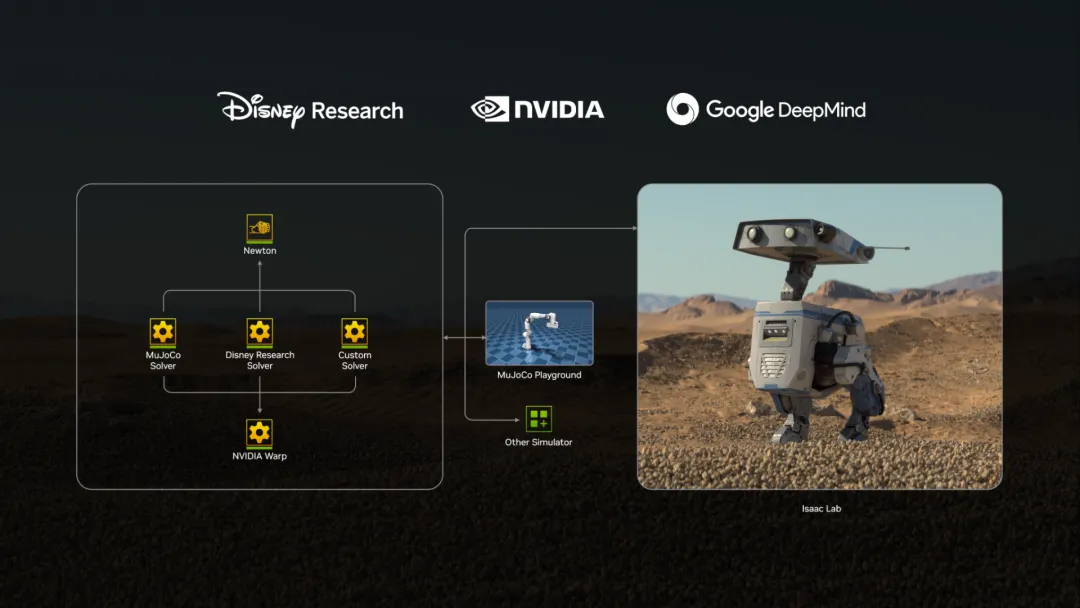
图片:Newton,来源:英伟达官网
04 当数字孪生开始"训练"机器人,它的价值坐标就变了
在很多讨论里,数字孪生与人工智能常被并列为两条赛道:一条负责建模可视化,一条负责识别决策。这种分工在今天看来,已经开始显得过于粗糙。
更准确地说,数字孪生与AI的关系,正在从"能力拼接"走向"系统耦合"。数字孪生不只是给AI提供一个展示界面,也不只是给机器人做一个三维背景板;它更应该成为AI获取环境先验、生成训练样本、进行策略验证、完成部署前演练的场景引擎。
这背后有一个值得认真提出的原创性问题:在Physical AI时代,数字孪生到底是在"孪生对象",还是在"孪生能力生成过程"?
如果答案只是前者,那么数字孪生最终可能停留在"更真、更细、更实时"的工程竞赛中;但如果答案开始转向后者,数字孪生的价值坐标就会改变。
数字孪生不再只服务于看板、驾驶舱和运营中心,而会进入模型训练、策略迭代、工业验证、机器人泛化这些更高价值环节。
这也意味着,数字孪生从业者需要补上一层新的方法论:场景不是被展示出来的,场景是被计算出来、生成出来、验证出来的。 谁能把场景转化为训练燃料,谁就更接近下一代产业基础设施。
05 真正的场景创新:把"世界"变成"生产资料"
过去几年,"场景创新"一度被频繁使用,但很多时候,它更多指向应用展示和项目落地。
而从近期"人工智能+"、数字孪生实践和GTC 2026的信号放在一起看,场景创新正在出现一个更深的含义:场景不再只是项目容器,而是在变成能力容器。
所谓能力容器,不只是把业务放进数字空间里。更重要的是,要把规则、流程、反馈、异常、扰动、评测与迭代机制一并纳入进去,使场景既能承载运行,也能承载训练;既能服务展示,也能服务进化。
真正有产业穿透力的场景创新,恐怕不是多做几个演示场景,而是把场景本身升级为一种可复用、可生产、可迭代的能力资源。这也是Physical AI给数字孪生带来的最大启发:未来的高价值场景,不只是业务流程的数字化映射,更是智能体能力生长的基础土壤。
比如,在工业制造场景里,真正关键的不只是把产线"一比一复刻"出来,而是能否在虚拟环境中持续生成异常工况、边界工况和复杂协同任务,供机器人和智能体反复训练。
在城市与园区场景里,真正关键的也不只是把路网、楼宇和设备连起来,而是能否把调度逻辑、事件扰动和人机交互机制转化为可测试、可迭代的规则空间。
从这个意义上讲,未来场景创新的分水岭,不在场景数量,而在场景是否可训练、可验证、可迁移。 而这,恰恰是数字孪生最值得主动进位的方向。
写在最后
GTC 2026真正值得记住的,或许不只是哪个新模型、哪块新芯片又刷新了行业想象。更重要的是,产业正在形成一个新的共识:AI进入现实世界之前,必须先拥有一个足够可信、足够丰富、足够开放的数字世界。
这对数字孪生而言,不只是一次热点映射,更像一次角色重估。数字孪生不应只满足于成为现实世界的"可视化副本",而应进一步成为Physical AI时代的"训练场""试验田"和"验证器"。
当行业开始争夺机器人的未来时,数字孪生真正该争夺的,不是屏幕中央的位置,而是世界生成的能力。因为谁能定义智能体进入现实之前的那个世界,谁就更有可能定义下一阶段人工智能落地的产业秩序。
📢 欢迎留言互动
看完这篇文章,你对"物理AI训练场"有了哪些新的认识?在你的行业里,数字孪生是否已经开始承担起"训练场"的角色?欢迎在评论区分享你的观察和思考——是观望、跟进,还是已经入局?我们评论区见。
#数字孪生行业观察#PhysicalAI#GTC2026#机器人#训练场#Newton#英伟达#仿真#世界模型#数字世界#场景创新#基础设施



