 夜雨聆风
夜雨聆风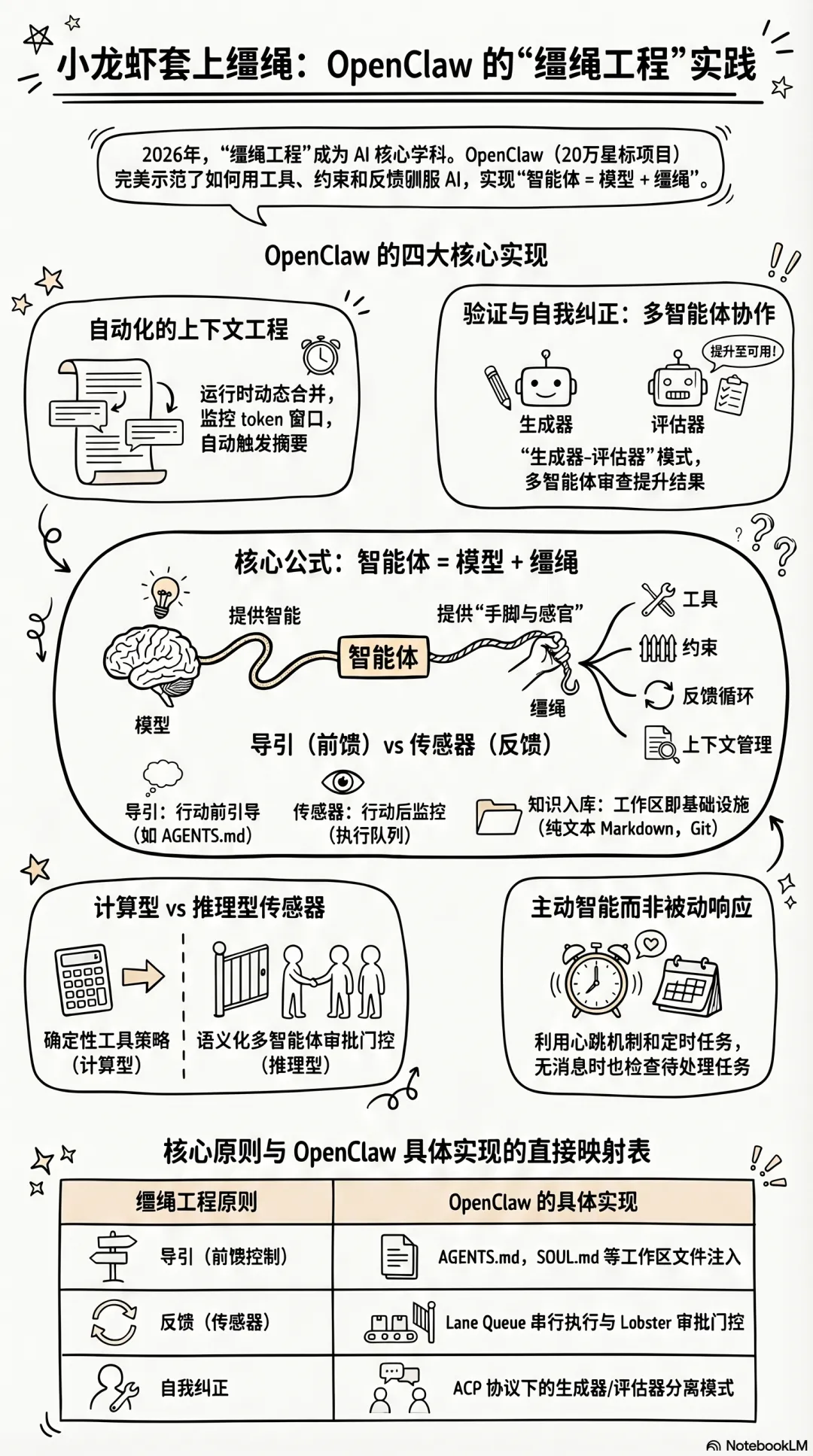
执行摘要
什么是缰绳工程?
OpenClaw:架构概览
缰绳工程原则到 OpenClaw 的映射
导引与传感器
上下文工程作为基础设施
验证与自我纠正
工作区作为版本控制的缰绳
原则映射汇总
缰绳工程原则 | OpenClaw 实现 |
导引(前馈控制) | AGENTS.md、SOUL.md、TOOLS.md、Skills——每次对话时注入上下文 |
计算型传感器 | Lane Queue 串行执行、工具策略限制、沙箱约束 |
推理型传感器 | 通过 ACP 的多智能体审查、Lobster 工作流审批门控 |
上下文工程 | 系统提示构建器、会话历史加载器、上下文窗口守护器、压缩机制 |
验证/自我纠正 | 生成器/评估器智能体分离、Lobster 中的结构化 JSON 验证 |
知识入库 | 纯文本 Markdown 工作区文件,可用 git 版本控制 |
工具约束 | 可配置工具策略、技能门控、沙箱隔离 |
主动执行 | 心跳定时器、定时任务、Webhook 触发器、事件驱动输入队列 |
活跃的拓展工作
OpenHarness(HKUDS)—— 开源 Python 智能体缰绳框架,支持与 OpenClaw、nanobot、Cursor 等 CLI 智能体集成。保留 OpenClaw 的 Markdown 优先知识模式和命令驱动协作模式,同时为研究人员提供可扩展的结构化缰绳。 AlphaClaw —— 包装 OpenClaw 的设置缰绳,提供自愈看门狗、Git 支持的工作区回滚、防漂移提示强化和基于浏览器的可观测性。它解决了缰绳工程的运维可靠性层,而不替换 OpenClaw 的核心运行时。 智能体缰绳插件(原生)—— OpenClaw 现在在运行时级别支持可插拔的智能体缰绳。例如 Codex 缰绳插件注册为提供者和运行时,具有可配置的回退行为。这使缰绳本身成为可交换的模块化组件。 ACP(智能体控制协议)—— OpenClaw 用于生成和管理专业化子智能体(Claude Code、Codex 等)的系统。ACP 将缰绳工程中的任务分解和委派模式变成了平台级的一等能力,包括支持并行子智能体会话。 WildClawBench —— 在真实 OpenClaw 环境中运行智能体的60个原创任务的基准测试,包括多模态、长周期和安全关键场景。这使缰绳在真实世界条件下的健壮性可以直接测量。 Lobster 工作流引擎 —— OpenClaw 内置的管道运行时,具有确定性执行、审批门控和恢复令牌。社区贡献者添加了带循环支持的子工作流步骤,实现了完全确定性的多智能体流水线,其中 LLM 做创造性工作,YAML 工作流处理编排。
实践经验
先约束,后扩展。Vercel发现移除编码智能体可用工具80%后,结果明显更好。更多工具意味着更多混乱和更多错误的工具选择。从少量定义明确的能力开始。 将工作区视为缰绳,而不仅仅是配置。编写具体、可执行的规则而非模糊的指导。量化行为准则,明确约束。“不应该做什么”比笼统地描述“应该做什么”更有效。 尽早添加计算型传感器。代码检查器、类型检查器、测试和结构化验证器在智能体行动后运行,成本低、速度快,且显著提高可靠性。使其错误消息专为 LLM 消费而优化。 将生成与评估分离。使用多智能体模式,让第二个智能体或确定性检查审查第一个智能体的工作。开销显著,但可靠性提升可以跨越从不可用到可用的门槛。 对一切进行版本控制。将智能体工作区放入 git 仓库。每次对指令、记忆和惯例的更改都可审计和回滚。这是防止智能体漂移最便宜的保险。 从单个配置良好的智能体开始。在添加多智能体复杂性之前充分发挥其能力。最好的部署是将架构复杂性与实际需求相匹配。
