 夜雨聆风
夜雨聆风
核心洞察:软件定义汽车的本质是硬件标准化、软件集中化。远程控制边缘节点(RCE)技术通过移除边缘MCU、将软件功能上移至中央计算单元,不仅是架构简化的手段,更是实现这一本质转变的关键技术路径。它直接应对了传统分布式ECU架构在成本、复杂度和可扩展性上的根本性挑战,为区域架构的落地提供了可行的硬件基础。 |
软件定义汽车的时代背景与架构演进挑战
汽车行业正经历一场由软件定义汽车驱动的深刻变革。这一变革的核心特征在于,软件价值在整车价值中的占比显著提升,车辆功能越来越多地通过空中下载技术更新迭代,而底层硬件则趋向于标准化和通用化。然而,这一演进路径并非坦途,其背后是传统汽车电子电气架构已触及发展瓶颈的现实。
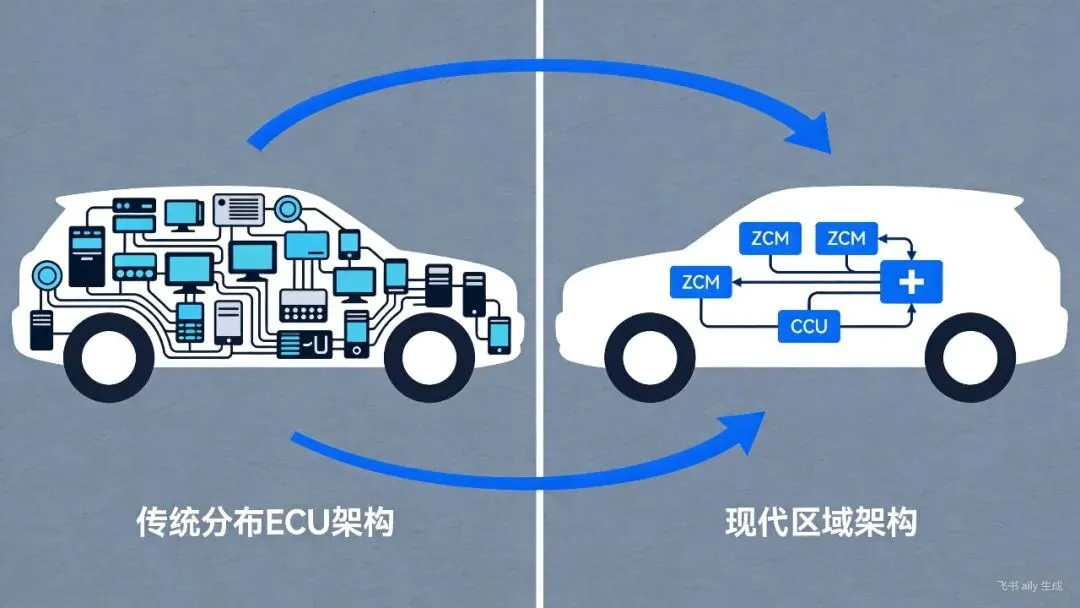
传统架构采用功能域分布式设计,平均每辆车搭载的电子控制单元数量超过250个。每个ECU通常专司单一功能,如发动机管理、车身稳定或信息娱乐,导致系统内存在大量功能孤岛。这种架构带来了三大核心痛点:线束复杂度呈指数级增长,整车线束总长度与重量成为工程难题;软件开发与维护成本高企,因为软件分散在数百个ECU中,需要针对不同硬件平台进行适配和验证;系统扩展性严重受限,新增功能往往意味着增加新的ECU和线束,使系统愈发臃肿。
为破解困局,行业正加速向区域架构演进。其核心思想是按物理位置而非功能来划分控制区域,通过强大的中央计算单元作为整车的主指挥中心,将ECU数量整合至约10个量级。软件层面则呈现集中化趋势,原本分布于各ECU的软件逻辑被上收至CCU或区域控制器中。这一转变对网络通信提出了前所未有的要求:CCU与边缘执行器之间需要高效、实时且安全的数据通道,同时边缘节点本身的设计也亟需简化,以降低硬件复杂性和成本。远程控制边缘节点技术正是在此背景下应运而生,旨在解决区域架构落地过程中的关键“最后一公里”问题。
传统分布式ECU架构痛点 1ECU数量:250+ 1线束复杂度:极高,总长度可达数公里 1软件管理:分散,每个ECU独立开发维护 1功能扩展:困难,需新增ECU和线束 1通信网络:异构复杂,存在多种总线协议 | 区域架构核心优势 1ECU数量:约10个(ZCM+CCU) 1中央计算:算力集中,统一调度 1软件管理:集中化,便于OTA更新 1硬件标准化:边缘节点简化,可复用性高 1网络统一:趋向以太网等高带宽主干网 |
RCE技术深度解析:定义、架构与核心优势
远程控制边缘节点是区域架构中承上启下的关键组件。其核心定位是作为中央计算单元与物理世界边缘执行器之间的智能网关。一个完整的RCE节点承担三大功能:配电管理,为所在区域的传感器、执行器提供稳定电源;负载执行,直接驱动LED、电机等负载;通信桥接,将来自CCU或区域控制器的高层指令转换为底层硬件可执行的控制信号,并收集传感器反馈信息。
从架构上看,一个典型的RCE节点以RCE收发器为核心,该PHY层芯片负责处理网络通信协议。其周边集成电源管理模块,支持宽电压输入并转换为各部件所需电压。通过SPI、I2C、UART、PWM、GPIO等多种接口,RCE收发器能够连接温度传感器、LED驱动芯片、电机驱动芯片、高边开关等外设,实现对各类负载的精确控制。可选配的逻辑与IO扩展模块则进一步增强了系统的灵活性和接口能力。
RCE技术带来的优势是系统性和根本性的。首先,它显著降低软件开发成本。通过在边缘节点中移除MCU,将控制逻辑软件集中到CCU或ZCM中,使得需要开发、验证和管理的软件单元数量大幅减少。工程师无需为每个车门模块、座椅模块或灯控模块编写独立的嵌入式软件,只需在中央单元开发统一的控制服务。其次,简化OTA更新流程。由于边缘节点没有MCU,自然也就不存在对其固件进行单独更新的需求。所有软件更新均在CCU/ZCM层面完成,极大降低了OTA的复杂度和风险。第三,实现硬件的高度可扩展性。RCE边缘节点成为一个标准化的硬件解决方案,同一设计可复用于车门、座椅、车灯等不同场景,仅需通过软件配置差异化的功能。这种设计也降低了供应链风险,允许采用来自不同供应商的兼容器件。
RCE三大核心优势: 1降低软件开发成本:边缘无MCU,软件集中至CCU/ZCM,减少开发、验证和管理单元。 1简化OTA更新:无需对边缘节点进行独立软件更新,所有更新在中央单元完成。 1实现硬件可扩展性:标准化硬件设计可跨功能复用,支持多供应商,提升供应链弹性。 |
此外,RCE还能带来减少负载线束和改善EMC/EMI性能的附加收益。通过从区域控制器直接驱动负载,优化了电力分配路径,减少了不必要的线束长度和连接器数量,同时也有利于整车的电磁兼容性设计。
RCE通信协议技术对比:10BASE-T1S、CAN FD Light与UART over CAN
在RCE的实际部署中,通信协议的选择至关重要,它直接影响到系统性能、成本和复杂度。目前主流方案包括10BASE-T1S、CAN FD Light和UART over CAN三种,各自针对不同的应用场景和需求。
10BASE-T1S是基于IEEE 802.3cg标准的单对线以太网物理层技术。它提供10Mbps的固定传输速率,支持总线型或多点拓扑,采用循环轮询的介质访问控制方式。其最大优势在于支持46至1500字节的有效载荷,能够承载更复杂的控制指令和数据集。该协议原生支持MACSec安全扩展和时间敏感网络特性,适用于对实时性和安全性有较高要求的场景,如高级驾驶辅助系统的传感器数据汇聚。在组网方面,单条10BASE-T1S总线上最多可连接16个节点。
CAN FD Light则是在传统CAN总线基础上的演进。它基于ISO11898-1:2024的帧格式,但采用了非标准的物理层实现以支持更高速率。其传输速率可在1Mbps至5Mbps之间配置,使用命令器-响应器的通信模式。有效载荷为1至64字节,与经典CAN帧相比有所提升。单总线最大节点数可达64个,但其缺乏内置的网络安全机制,也不原生支持TSN。在低速率模式下,CAN FD Light可使用标准的CAN FD收发器;而要达到5Mbps高速率,则需要专用的命令器芯片。
UART over CAN是一种非标准的协议实现,本质上是将UART串行数据封装在CAN帧中进行传输。速率范围较宽,从0.1Mbps到1Mbps,同样采用命令器-响应器模式,有效载荷为1至64字节。它最大支持64个节点,主要针对照明网络等特定应用进行了优化。由于非标准化的特性,其生态系统和互操作性相对受限。
协议 | 标准 | 传输速率 | 有效载荷 | 最大节点数 | 网络安全 | TSN支持 | 推荐外设 |
10BASE-T1S | IEEE 802.3cg | 10Mbps | 46-1500字节 | 16 | MACSec | 是 | CMC、晶振、ESD二极管 |
CAN FD Light | ISO11898-1:2024 (帧格式) | 1-5Mbps | 1-64字节 | 64 | 无 | 否 | ESD二极管 |
UART over CAN | 无标准 | 0.1-1Mbps | 1-64字节 | 64 | 无 | 否 | ESD二极管 |
在拓扑与调度机制上,三者呈现出明显差异。10BASE-T1S采用轮询调度,由主节点周期性发送信标帧,然后按固定顺序为每个从节点分配通信时隙。这种方式保证了所有节点的公平性和确定性延迟,但灵活性相对较低。而CAN FD Light和UART over CAN采用命令器-响应器模式,由命令器节点主动发起与特定响应器的通信。这种方式灵活性高,命令器可根据实时需求优先处理关键节点,但公平性和最坏情况下的延迟保障不如轮询机制。
另一个关键区别是数据线供电支持。10BASE-T1S可支持PoDL,在点对点通信中,12V系统可提供最高5W功率,48V系统可达50W,这为简化线束提供了可能。而CAN FD Light和UART over CAN均不支持数据线供电。
无MCU边缘节点设计案例研究:前照灯系统
汽车前照灯系统是RCE技术应用的理想场景,其功能正从简单的照明向智能视觉系统演进,包含自适应远光、像素级遮蔽、动态转向照明等复杂功能。传统架构下,前照灯控制通常依赖一个独立的灯控ECU,内部包含MCU、LED驱动芯片、CAN收发器等,系统复杂且软件封闭。
基于RCE的无MCU方案彻底改变了这一设计范式。以10BASE-T1S或CAN FD Light方案为例,核心是一颗集成了相应PHY层或响应器功能的RCE芯片。该芯片通过总线直接接收来自CCU或前舱区域控制器的照明控制指令,指令中包含了每个LED通道的亮度、PWM占空比、调光曲线等参数。RCE芯片通过内置的I2C、SPI、GPIO、PWM等接口,直接驱动外部的LED驱动级、调平电机驱动器,并读取温度传感器的数据以进行热管理。

另一种常见方案是UART over CAN。在此架构中,一个标准CAN收发器与一颗专用驱动芯片配合工作。例如,TI的TPS92544-Q1 LED驱动芯片可通过UART接口接收来自CAN总线的控制数据包。CCU生成的照明控制指令被封装在CAN帧中,经总线传输至前照灯节点。CAN收发器将差分信号转换为单端信号,再通过UART接口传递给TPS92544-Q1。该驱动芯片解析指令后,直接控制LED阵列的亮灭和调光,同时还能通过MPIOx和DIOx接口与DRV8434A-Q1等电机驱动芯片通信,协同控制前照灯的垂直调平电机,实现自适应光型调整。
无MCU设计的精髓在于,RCE PHY或收发器承担了所有数字和模拟I/O的管理职责。它不仅要处理网络通信,还要通过各类串行或并行接口与外围器件交互。例如,通过I2C读取温度传感器监测LED结温,通过SPI配置LED驱动芯片的电流增益和PWM频率,通过GPIO控制散热风扇的启停,通过专用接口生成PWM信号驱动调平电机。所有实时性要求高的底层控制循环,如恒流控制、过温保护、短路检测,均由硬件逻辑或驱动芯片本身实现,而非软件。
这种架构带来的优势是多方面的。硬件得到简化,省去了MCU及其外围电路,降低了BOM成本和PCB面积。软件完全集中,所有照明逻辑和算法在CCU中统一开发和更新,便于实现跨车型的平台化。系统扩展性增强,若要增加像素级控制功能,只需采用如TPS929120-Q1这类支持FlexWire接口的多通道LED驱动芯片,并通过软件升级CCU中的控制算法即可,无需改动硬件架构。这为未来更智能的照明功能,如车灯投影交互、动态光场通信等,预留了技术空间。
系统集成与功能安全考量:以车窗防夹为例
车窗防夹功能是体现RCE方案在实时性与安全性方面挑战的典型案例。该功能要求系统在检测到障碍物时,必须在极短时间内(通常为数百毫秒)停止并反转电机,以避免造成人身伤害。对比传统方案与RCE方案的工作流程,能清晰揭示两者在系统集成和功能安全实现上的本质差异。
在传统边缘节点方案中,控制决策完全本地化。当CCU发出“升起车窗”指令后,边缘节点的MCU接收指令,生成相应的SPI命令和PWM信号驱动电机驱动器。同时,MCU实时监测霍尔效应传感器的脉冲和电机驱动器的电流反馈。一旦电流曲线出现异常波动(指示遇到阻力),MCU可自主决策,立即改变PWM输出以反转电机。整个检测-决策-执行的闭环在边缘节点内部完成,延迟极低,通常仅为微秒级。
而在RCE方案中,控制逻辑被上移至中央单元。CCU生成包含SPI数据和PWM参数的控制包,通过RCE协议发送至车窗节点。边缘的通信接口芯片(如RCE PHY)对指令进行桥接,生成实际的PWM信号控制电机。此时,关键的传感器数据处理面临两种选择:一是由边缘通信接口读取电流和霍尔传感器数据,将其存储在本地缓存中,等待CCU周期性轮询;二是通信接口具备一定的预处理能力,可直接将处理后的状态标志或简单事件上报给CCU。当异常发生时,需要CCU根据收到的反馈信息判断是否发生夹手,并生成新的反转指令下发。这一过程引入了额外的通信延迟和集中决策延迟。
传统车窗防夹方案 1控制决策:本地(边缘MCU) 1延迟:极低(微秒级) 1通信依赖:低,仅初始指令和状态上报 1安全实现:相对简单,闭环在本地 1故障应对:边缘MCU可独立执行安全状态 | RCE车窗防夹方案 1控制决策:可能集中在CCU 1延迟:较高(增加通信与处理延迟) 1通信依赖:高,关键环路依赖网络 1安全挑战:需保障通信实时性与可靠性 1故障应对:依赖CCU或通信接口的容错机制 |
这种架构转变对功能安全提出了更高要求。在RCE方案中,通信中断的威胁被放大。因为边缘节点本地实时控制能力有限,一旦与CCU的通信链路出现故障,可能无法及时执行防夹保护。因此,系统设计必须考虑通信链路的冗余、健康状态监控以及故障下的安全状态迁移。例如,当通信超时,边缘节点应能自动进入预定义的故障安全状态,如停止电机或缓慢降速。
网络安全的挑战也随之升级。在没有本地MCU的情况下,实施加密、身份验证、消息完整性校验等安全措施变得更加复杂。安全边界实际上被推至CCU或ZCM,要求中央单元具备更强的安全处理能力,并对所有下行控制指令进行安全封装。同时,上行传感器数据也可能需要保护,以防被篡改。
在设计层面,还存在处理负荷分配的权衡。如果由CCU直接进行详细的负载控制(如生成精确的PWM波形),那么CCU的处理负荷会显著增加,但ZCM的负荷和接口复杂度得以降低。反之,如果由ZCM承担更多控制逻辑,则ZCM需要更强大的处理能力和更丰富的I/O接口,但CCU得以解脱,专注于更高层的应用逻辑。这种权衡需要根据具体的系统分区、实时性要求和芯片选型进行精细考量。
RCE技术对汽车电子行业的影响与未来展望
RCE技术的普及正在重塑汽车电子行业的供应链格局和技术开发范式。硬件标准化和可扩展性的趋势,将逐渐改变传统Tier1与Tier2供应商之间的分工模式。过去,Tier1提供集成了软硬件的完整ECU模块;未来,可能会出现专注于生产标准化RCE硬件模块的供应商,而Tier1则更侧重于系统集成、区域控制器和中央计算平台的开发。这种分工有助于降低行业准入门槛,促进技术创新和成本优化。
更深层次的影响体现在软件开发模式的根本性变革上。软件高度集中于CCU,使得软硬件解耦更加彻底。开发团队可以更专注于应用层算法和功能的迭代,而无需深度绑定底层硬件细节。这极大地推动了面向服务的架构在汽车领域的落地,以及敏捷开发流程的引入。车辆功能的更新和新增,将更多地通过软件服务订阅和OTA推送来实现,加速了汽车向“可进化智能终端”的转变。
从成本角度分析,虽然单个RCE器件(如集成PHY的芯片)的采购成本可能高于一个低端MCU,但必须从全生命周期总成本的维度进行审视。RCE方案通过减少软件开发投入、简化测试验证流程、降低线束复杂度和重量、提高生产装配效率以及优化售后维护成本,能够在整车生命周期内实现更优的经济性。特别是对于车企而言,软件成本的降低和开发效率的提升,其价值往往远超硬件成本的细微差异。
RCE技术的演进也与车内网络的发展相互促进。作为边缘接入点,RCE对通信带宽和实时性的需求,正推动着10BASE-T1S等新一代以太网技术的成熟和普及。同时,中央计算单元对海量数据汇聚和处理的需求,也要求骨干网络向千兆乃至更高带宽的以太网升级。这种“边缘”与“核心”的协同演进,将加速汽车网络从异构总线向统一以太网架构的转型。
技术融合是另一个重要趋势。RCE与高级LED驱动技术的结合,如TI的TPS929120-Q1支持12通道独立PWM调光和FlexWire接口,为智能照明和像素级显示提供了可能。与智能电机驱动技术的融合,则能实现更精确、更安静的车身运动控制。这些融合将赋能下一代汽车实现更智能、更动态、更个性化的外部照明和内部氛围体验。
然而,挑战依然存在且不容忽视。实时性与功能安全的平衡仍是工程难点,尤其是在涉及人身安全的控制环路中。
