 夜雨聆风
夜雨聆风中海达 UAV-PPK软件是一款针对无人机数据的后处理工具,能给用户提供更加可靠的定位结果。本软件采用中海达自主研发的高精度双频 RTK 算法对无人机数据进行处理,能获得无人机相机拍照时刻的高精度位置结果。本软件可以导入照片文件夹,通过匹配拍照时刻的 pos,软件可以自动生成 Smart3D、PIX4D、天际航影像定向系统软件所需要用到的成图文件格式。
1.1 UAV-PPK主界面介绍
通过开始菜单或直接进入程序目录运行UAV-PPK.exe,就进入了UAV-PPK数据处理软件的主程序。如下图所示,软件界面由菜单栏、工具栏、向导栏、状态栏、消息区等组成。
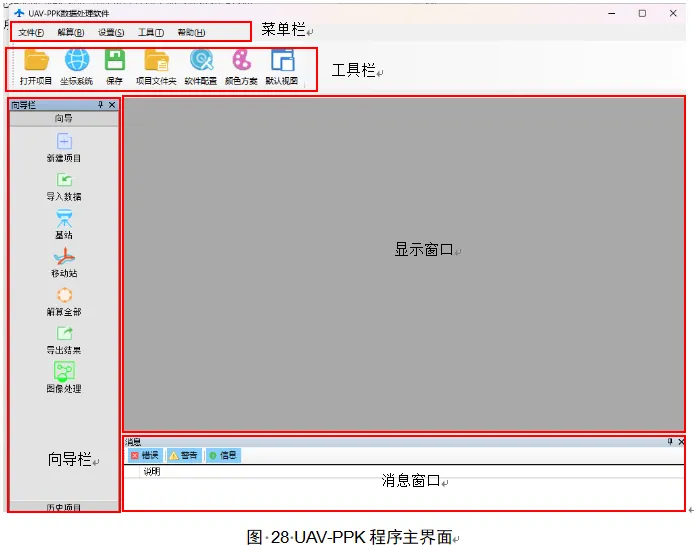
1.下拉菜单
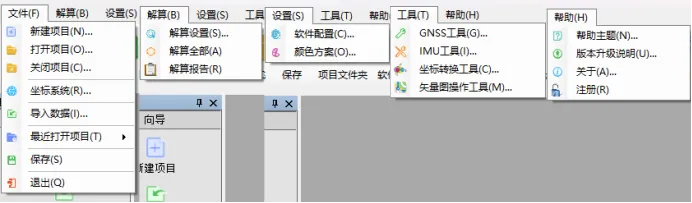
解算菜单可以实现:“解算设置”用于对设置参与解算的卫星高度截止角、参与解算的卫星系统、解算开始时间、解算结束时间以及解算间隔;“解算全部” 用于启动移动站数据解算功能;“解算报告”用于打开 PPK 解算的结果报告。
设置菜单用于实现:“软件配置”用于配置软件语言,结果输出的时区,在线地图的选择启用。“颜色方案” 可设置【平面图】上图例的解的颜色。
工具菜单可以实现:“GNSS 工具”将非中海达格式数据,请先转成中海达格式数据。GNSS 工具支持将天宝 BD930 主板、天宝 BD970 主板、Novatel 主板、比逊主板数据和 RTCM3.2、RTCM3.0 差分数据、思南主板转成中海达格式数据;“IMU 工具”将其它格式的惯导姿态数据转成中海达 IMU 格式数据;“坐标转换工具”进行布尔莎七参数、平面转换四参数+高程拟合参数计算、单个点和点文件转换、生成坐标转换参数*.dam 文件。“矢量图操作工具”对当前项目拼出来的图片进行操作:图上展点、图上推演、距离测量等操作。
帮助菜单主要实现:“帮助主题” 可查看关于软件的帮助信息。“版本升级说明”可查看软件的版本升级信息;“关于” 可查看软件的版本信息和版权申明;“注册” 对软件进行注册及对注册信息进行查看。
1.工具栏
直接点击工具栏相应按钮,执行某个命令;
2.向导栏窗口
向导栏窗口用来引导用户实现新建项目、导入数据、解算设置、数据解算、结果导出及查看历史项目的功能;
3.状态栏窗口
根据向导栏窗口的操作显示基站、移动站属性信息、解算结果信息等详细情况;
4.消息窗口
对软件运行信息进行显示。
2.2 UAV-PPK解算需要的数据
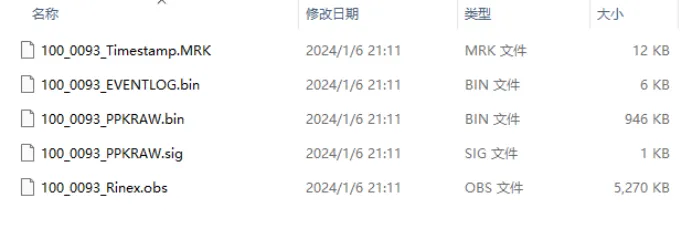
UAV-PPK解算需要准备需要解算的照片文件、基站文件(*.GNS/*.ZHD格式)、入移动站文件(*.GNS/*.ZHD/*.bin格式)、拍照点文件(*.MRK),可以选择使用无人机飞控出来的惯导数据*.imu(包含姿态角信息)。前四项文件为必须数据,对于无人机惯导数据,由于一般姿态角精度不高,目前基本不导入 IMU 数据进行处理。

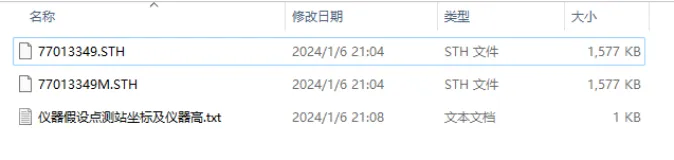
图31静态数据
UAV-PPK解算作业解算
1.新建项目
执行主程序,启动UAV-PPK后处理软件后,选择『向导』菜单的【新建项目】进入任务设置窗口,或者在下拉菜单『文件』中【新建项目】进入任务设置窗口。输入项目名称,选择项目存放的文件夹路径后,点击确定按钮。
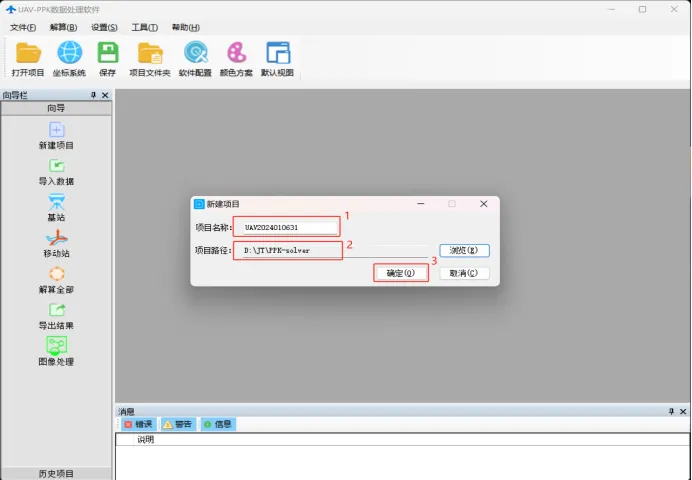
图33新建项目
确认后,软件界面会跳转到下图状态。
图34等待导入数据软件界面状态
2. 导入数据
设置好项目名称和工作目录后,此时需要导入数据。选择『向导』菜单的【导入数据】进入数据导入窗口。
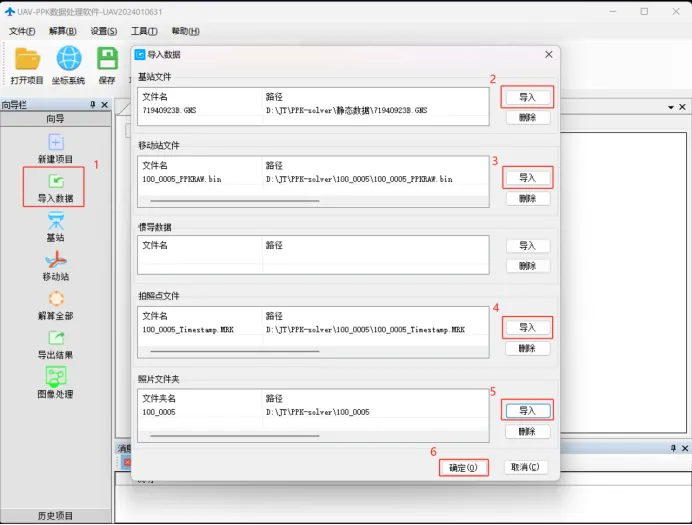
图35导入数据步骤
数据导入完成后,系统将弹出坐标系统设置对话框,这里主要是对地方参考椭球和投影方法及参数进行设置。软件PPK解算出来的坐标为WGS84椭球坐标,坐标系统设置的作用是将WGS84椭球坐标转成自己需要的地方坐标,用户在使用时需要注意源椭球一定是WGS84椭球。默认的坐标系统(源椭球WGS84、当地椭球为北京54),最后获得的坐标实际是将WGS84椭球坐标直接进行高斯投影的平面坐标。如果用户要得到其他椭球的平面坐标,可以根据需要修改当地椭球,但涉及到椭球转换需要输入布尔莎七参数或者四参数和高程拟合参数。如果基站当地椭球的空间直角坐标和WGS84椭球的空间直角坐标差别不大(相差几十米),在不影响PPK固定的情况下,用户可以不输入布尔莎七参数或者四参数和高程拟合参数,也可以得到可靠的结果。
坐标系统支持*.dam参数文件导入,知道参数,要生成*.dam文件。只需要在坐标系统参数界面根据需要选择源椭球(本软件源椭球一定为WGS84坐标)、目标椭球,输入投影参数、椭球转换参数或者平面转换四参数及高程拟合参数,点击保存,就在软件安装目录文件夹下的GeoPath文件夹下生成了一个*.dam文件。
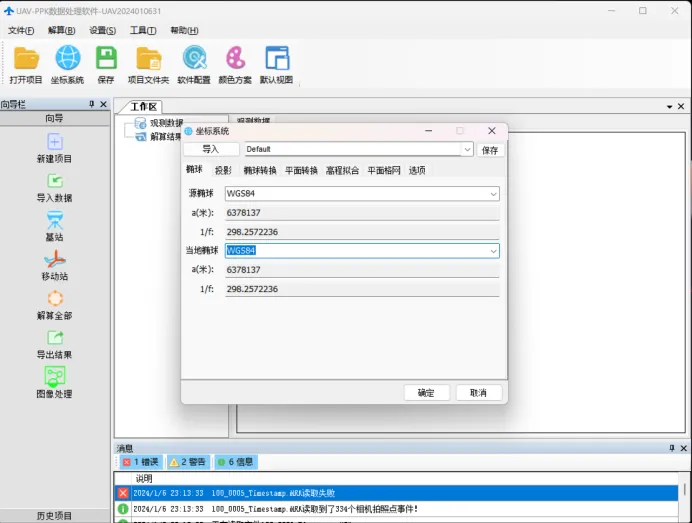
图36坐标系统设置
3. 设置基站
选择『向导』菜单的【基站】进入属性配置窗口,这里可以设置基站坐标、天线高,接收机类型,天线类型。基站为UBase接收机,请选择“设置模式”为“接收机类型”,同时接收机类型选择设置为“iRTK2”,天线高再根据实际情况选择斜高或直高量取方式输入量测值。特别提醒:一定要对基站的坐标进行配置,软件从静态文件中读取或者计算的基站坐标可能不准确。基站的坐标及高程可以在任务准备阶段使用GPS对拟架设基站点进行测量,并记录坐标参数值备用。
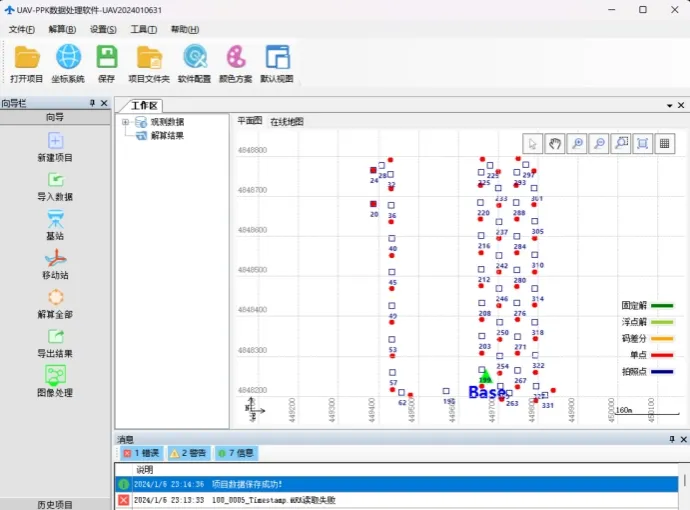
图 38数据导入结束
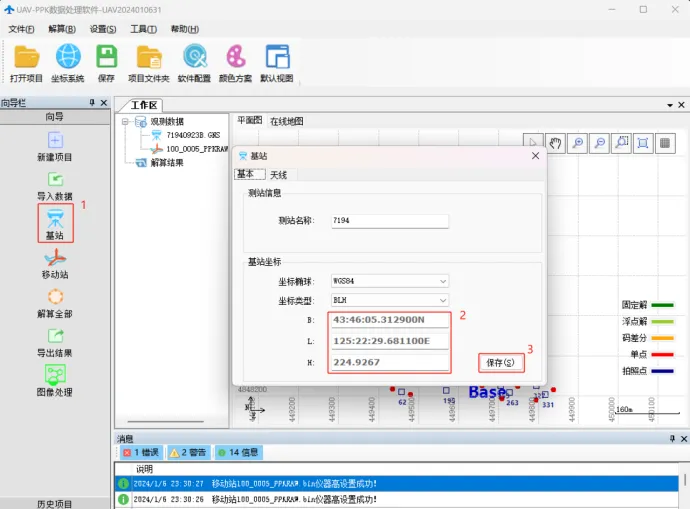
图37基站坐标设置
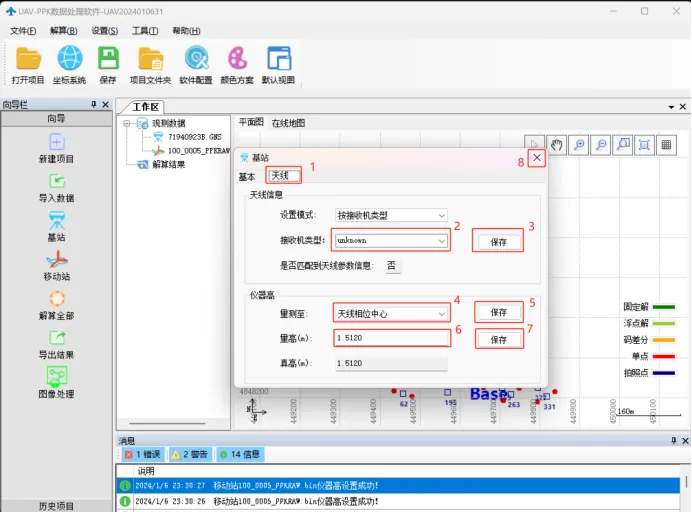
图38基站天线相关参数设置
4. 移动站设置
选择『向导』菜单的【移动站】进入属性配置窗口,这里可以设置机载端的RTK接收机的天线高、天线类型、同时还可以设置以相机为中心,机载端RTK天线相位中心相对相机的三个方向的偏差(Y方向为飞机前进方向,X方向为右,Z方向向上,如图所示)。
5. 数据解算
选择菜单栏的『解算』下的【解算设置】进入解算设置窗口,在弹出的对话框中,用户可以设置相机拍照延迟、参与解算的卫星高度截止角、信噪比阈值、参与解算的卫星系统、解算模式、解算开始时间、解算结束时间以及解算间隔。用户可以不必对解算进行设置,软件会自动按照默认的设置进行解算,默认设置为:相机拍照延迟默认为0,卫星截止高度角为10°,信噪比阈值为20,解算模式默认为双向,GPS+BDS+GLONASS,解算开始时间为所有观测文件的最小观测时间,解算结束时间为所有观测文件的最大观测时间,解算间隔默认为观测文件的采样间隔。
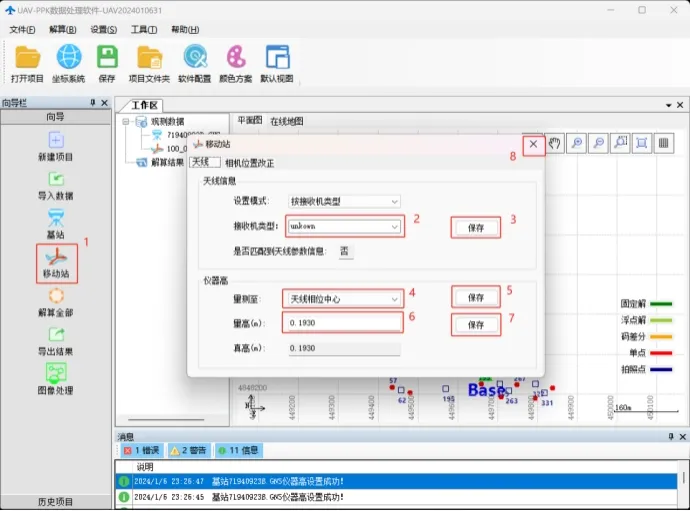
图 41移动站参数设置
选择『向导』菜单的【解算全部】,或选择菜单栏的『解算』下的【解算全部】来执行解算命令,软件会自动开始对移动站数据进行解算。用户可以通过实时解算窗口查看解算进度和当前历元的解状态、公共卫星数、所有观测卫星数、WGS84 椭球的大地和空间直角坐标、解精度及 PDOP 值。同时在解算过程中用户可以根据需要进行暂停和取消解算,如果用户选择暂停,解算线程会暂停5s后继续执行,如果选择取消,此时软件会弹出提示窗口,用户如果点击确定,解算结果会清空。
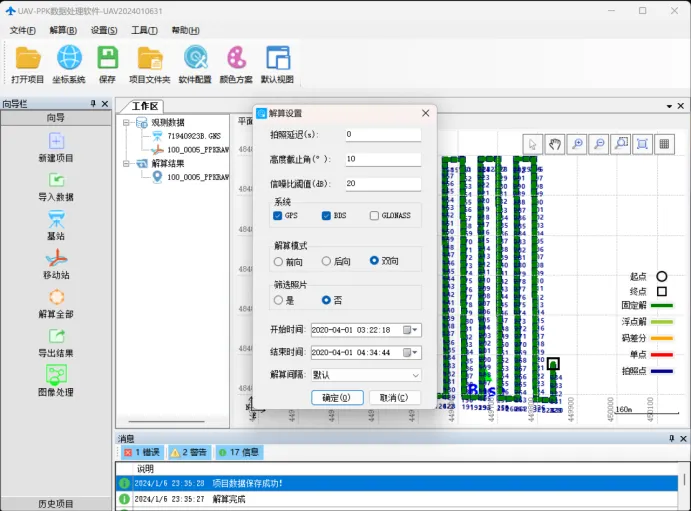
图39解算设置
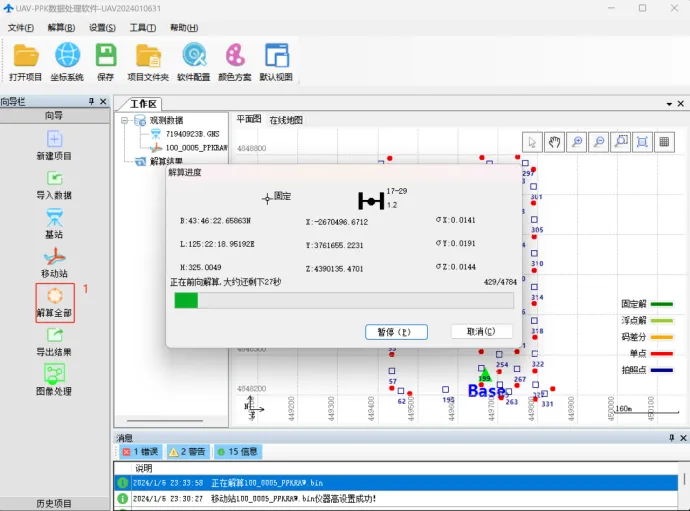
图40数据解算
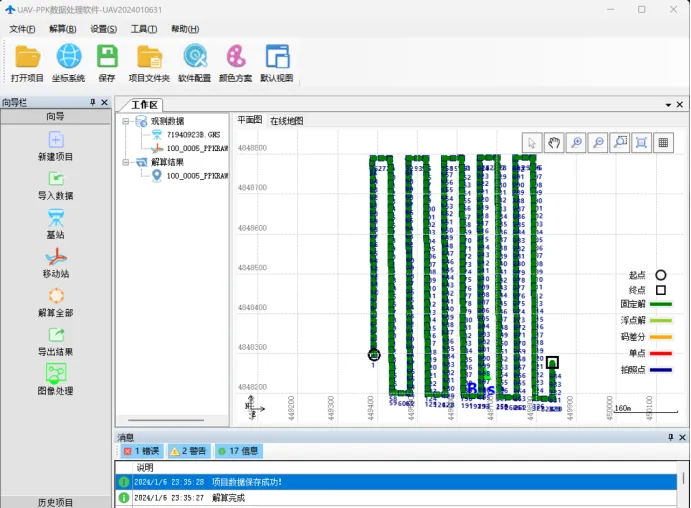
图41PPK数据解算结束
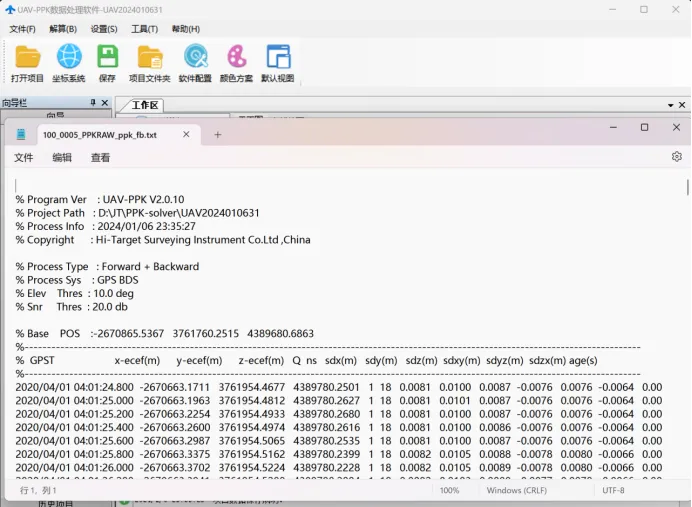
图42解算报告
6. 导出数据
数据解算完成后,选择『向导』菜单的【导出结果】,系统将弹出结果导出对话框,如果您“导入数据”没有导入照片文件夹,导出结果将导出相机拍照点pos文件;如果您“导入数据”导入了照片文件夹,导出结果除了导出相机拍照点pos文件外,软件根据照片生成时间将其与pos点一一对应起来,同时还导出dip-modeler_01.csv、Pix4d_SourceBLH_01.txt、Smart3d_01.xlsx这三种成图格式,dip-modeler.csv为天际航影像定向系统软件用到的格式,Pix4d_SourceBLH_01.txt为PIX4D软件用到的格式,Smart3d_01.xlsx为Smart3D软件用到的格式,其中UAV.txt为相机拍照点pos文件,PhotoResults_01.csv为更详细的解算报告,该报告中包含拍照时刻的定位解状态、公共卫星数等详细信息。Photos文件夹为软件自动剔除的质量不好的照片,DeletPhotos_instruction.txt为剔除的照片拍摄时的位置文件。
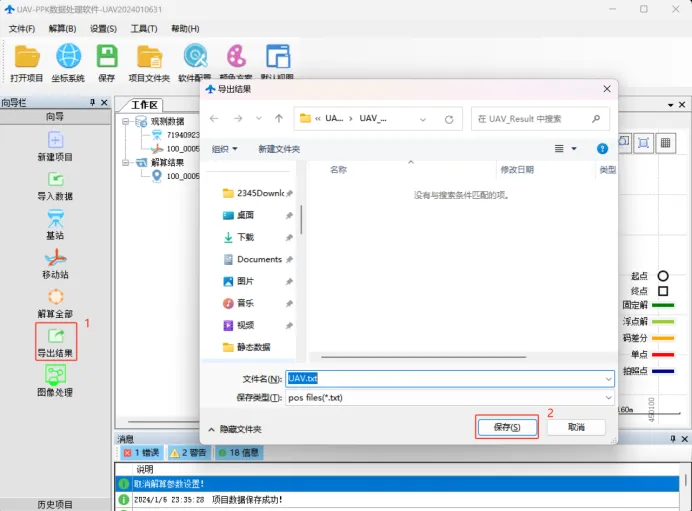
图43导出结果
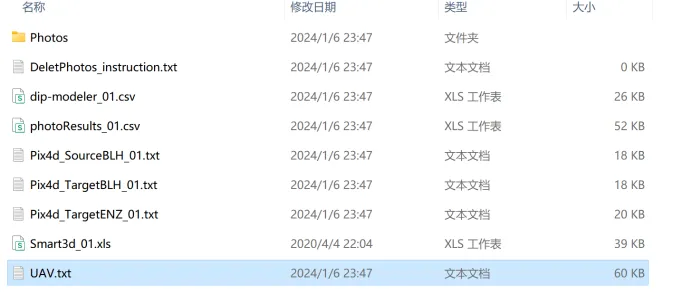
图44为导出数据文件夹结果数据
