 夜雨聆风
夜雨聆风引言
开发流程是产品成功的关键基础。合理的开发路径能够显著减少返工,节省时间与资源投入。在产品开发中,越前置的决策对整体项目的影响越大——这类似于建筑的地基:基础偏差可能导致整个项目需要大幅调整,甚至永远无法达到预期目标。
本文以机器人灵巧手产品为例,从结构工程师视角系统梳理从零到一的产品开发流程。内容涵盖产品需求文档编写、架构堆叠设计、驱动器选型等前置环节,为后续的原理参数设计、运动学动力学计算及详细结构设计奠定基础。
一、产品需求文档:定义产品的起点
1.1 PRD的核心价值
产品需求文档(PRD)是整个开发流程的起点,其核心作用在于明确定义:产品为何存在、产品具备何种特征、最终需要达到何种标准。一份完善的PRD能够指导整个项目团队协调工作,确保各环节对产品目标形成一致理解。
从机器人及灵巧手产品来看,PRD通常包含以下核心模块:
市场与竞品分析 产品定义与定位 详细功能需求 性能量化指标 关键硬件选型要求 软件与算法需求 生产与测试认证需求
1.2 功能需求的约束传导
功能需求的确定并非孤立存在,而是受到产品定义和使用场景的层层约束。
以灵巧手产品为例,需要确定的因素包括:
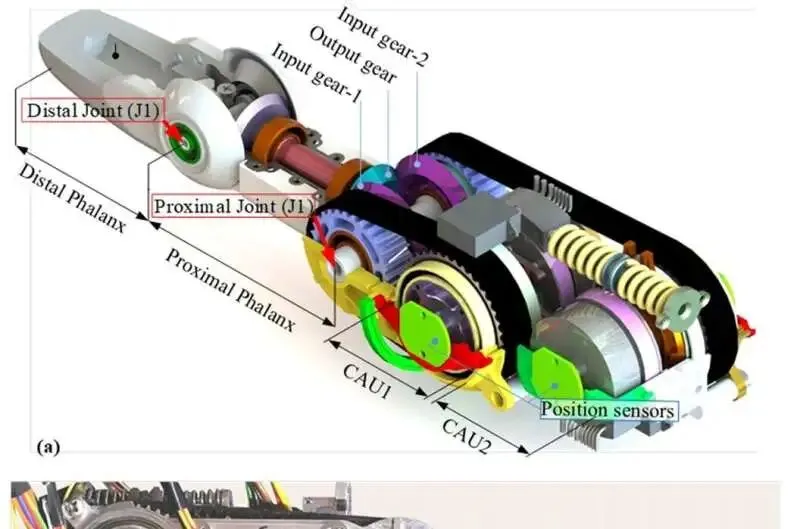
机械结构形式:传动方式选择(连杆驱动、腱绳驱动或直驱)需根据负载能力、精度要求和成本预算综合考量。连杆驱动结构稳定性高、承载能力强,适合工业场景;腱绳驱动灵巧性更优,适合需要高度仿生特性的应用。
驱动单元类型:电机类型直接决定性能上限与成本结构。是选择无框力矩电机+谐波减速器的旋转关节方案,还是采用力矩电机+行星滚柱丝杠的线性关节方案,需要根据指尖输出力、工作空间和响应速度要求进行取舍。
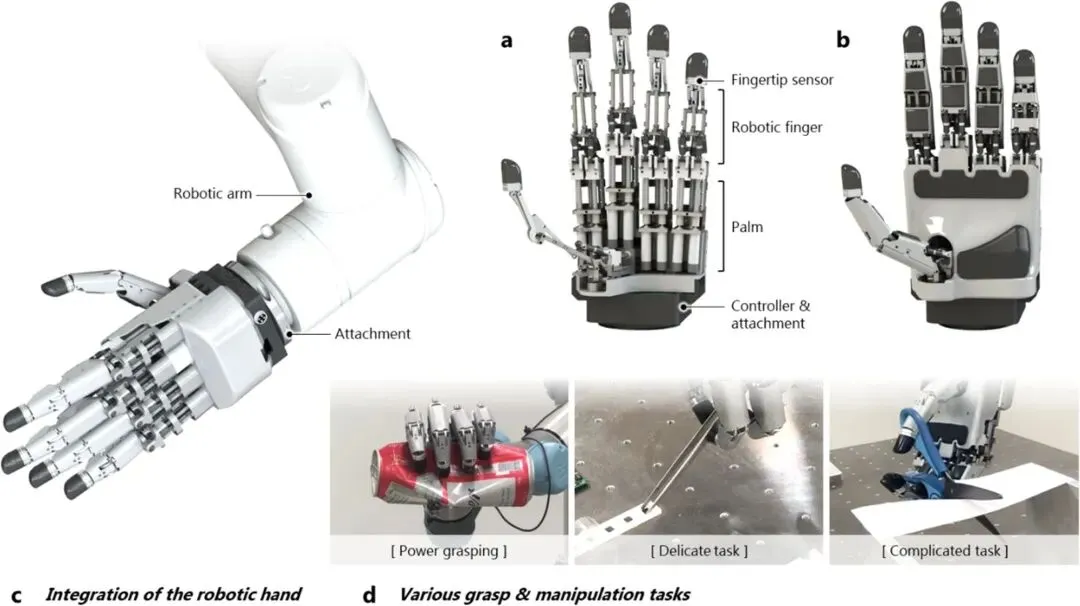
传感器配置:力传感器、位置传感器、触觉传感器的配置方案受使用场景制约。精细操作任务需要配置多维力传感器,而基础抓取任务可简化至单维力反馈。
通信与感知系统:通信总线类型(CAN、EtherCAT、TTL串口等)需与控制系统匹配;视觉感知系统的覆盖范围和分辨率要求直接影响后续算法设计。
自由度配置:自由度数量和分布是产品定位的核心决策,通常受目标场景的功能需求和成本约束双重影响。
1.3 性能指标的量化设计
性能指标将产品需求转化为可验证的量化参数,主要包括:
性能指标的设定并非越高越好,而需要在成本控制和使用场景需求之间寻求平衡。以工业搬运场景为例,物品的最大重量和尺寸可直接转化为最大抓取力要求,并约束指尖尺寸范围,从而避免过度设计导致的成本浪费。
1.4 关键硬件与供应链考量
关键硬件参数的确定不仅涉及性能匹配,还需考虑供应链风险管理。硬件选型阶段需要评估:供应商稳定性、供货周期、替代方案可用性等因素。此外,关键硬件的尺寸和接口会直接影响机械架构设计——驱动器的外形尺寸决定了关节位置的布置可行性,通信接口类型影响控制系统方案选择。
对于面向量产的消费级产品,还需考虑安规认证要求对产品设计的约束,包括电气安全、电磁兼容、材料环保性等维度。
二、架构堆叠:验证可行性的关键步骤
2.1 架构堆叠的核心任务
架构堆叠是将产品需求转化为空间布局方案的过渡环节,主要工作内容包括:
确定产品整体尺寸与各部分比例关系 规划每个关节的位置布局与转动方向 布置各元器件的安装位置与走线空间
这一步骤的输出既是对PRD可行性的验证,也是后续详细设计的约束依据。其输入约束条件全部来源于PRD定义:自由度数量与分布、整体尺寸与比例限制、每个关节和连杆的初步参数。
2.2 堆叠设计的输出物
架构堆叠阶段的典型输出包括:
骨架模型:3D参考模型,定义整体尺寸、各部分比例、关节电机(驱动器)布置位置。该模型作为后续详细建模的基础骨架,完整的CREO/SolidWorks源文件可存档供设计团队参考。
需求澄清文档:记录堆叠过程中发现的约束冲突和设计妥协,明确哪些需求可以同时满足、哪些需要在后续阶段进行权衡。
外观曲面模型(可选):部分消费级产品在此阶段同步进行外观包覆设计,将ID方案与结构堆叠同步推进。
2.3 堆叠设计的约束平衡
架构堆叠过程中需要处理的核心矛盾包括:
体积约束与性能需求的平衡:更小的结构设计通常意味着可以采用更小规格的驱动器,但这往往伴随着输出力的下降。设计者需要在有限的包络空间内实现最优的性能配置。
重量与负载的推重比概念:机械臂末端负载能力是有限的——手的自重加上负载重量构成总负载上限。更强的负载能力通常需要更大的驱动器,进而导致更大的自重,形成类似火箭推重比的约束关系。设计者需要整体考虑末端负载、机身承重能力和结构重量的综合平衡。
各步骤的相互影响:架构堆叠阶段的输出会影响驱动器选型范围,驱动器确定后又反过来约束硬件接口和结构设计。整个过程存在多次迭代和妥协,这是产品开发的常态,需要设计团队保持开放心态处理变更。
三、驱动器选型:影响全局的核心决策
3.1 线性驱动器的适用场景
本文聚焦的连杆式灵巧手采用直线驱动器(微型伺服电缸)作为关节驱动单元。伺服电缸是一种小型一体化线性执行器,将电机、减速器和丝杠机构集成于紧凑体积内,是机器人、医疗器械等精密设备的核xin运动部件。
3.2 选型关键参数
驱动器选型需要关注的参数涵盖性能、接口和结构三个维度:
性能参数
通信与编码器参数
通信方式的选择涉及PWM、TTL串口、CAN等多种协议,需与嵌入式控制系统匹配。编码器类型影响位置反馈精度和成本,可根据控制需求选择增量式或绝对式编码器。
结构参数
外形尺寸必须与关节布置空间匹配;输出端接口和固定方式需符合结构设计规范,便于装配和维护。
3.3 驱动器的性能权衡
驱动器选型面临的典型矛盾包括:
体积与输出力的反向关系:更小尺寸的驱动器可支持更紧凑的结构设计,但通常输出力较小。追求更大输出力需要更大的减速箱和更高的减速比,这会直接导致末端速度下降。
减速比与精度的矛盾:高减速比虽然能够放大输出力,但同时会累积背隙,导致结构在正反方向运动时出现松垮感,影响绝对定位精度。对于需要高精度的应用场景,过高的减速比反而成为制约因素。
响应速度与负载能力的平衡:快速响应通常需要较低的惯性负载,但提升负载能力又往往需要增加减速比来放大输出扭矩,两者存在内在矛盾。
3.4 选型流程建议
实际选型过程中,建议遵循以下步骤:
根据尺寸参数和输出力/速度要求进行初筛 使用供应商提供的选型工具进行参数匹配(如因时机器人等厂商提供在线选型界面) 下载3D模型和手册资料进行空间验证 与结构设计团队确认接口兼容性 综合评估成本、供货周期和服务支持

四、结构方案对比与选型依据
4.1 主流传动方案概述
当前灵巧手设计中,主要存在三种传动方案,各有适用场景和技术特点:
连杆驱动型:通过刚性杆件、齿轮、凸轮或差动机构将电机输出直接传递至关节。驱动器通常与关节一一对应,或通过机械耦合实现多关节联动。结构形式成熟,制造工艺稳定,适合需要高可靠性的工业应用。
腱绳驱动型:模仿人类肌腱结构,通过钢丝绳或高强度纤维绳将力矩远程传递至关节。驱动器可集中布置在手掌或前臂位置,有利于减轻指部质量,但腱绳存在磨损和张力衰减问题。
直驱型:将电机直接集成于关节轴上,取消中间传动环节。控制精度高、响应快,但系统成本较高,且电机直接集成对散热和密封设计要求较高。
4.2 方案对比分析
从工程应用角度,三种方案的性能对比如下:
4.3 选型建议
不同的应用场景应选择相匹配的结构方案:
工业制造与装配:优先推荐连杆结构,可靠性高、维护成本低,适合规则重复的任务。
服务机器人与医疗辅助:腱绳结构灵巧性优势明显,适合非结构化环境和精细操作需求。
高端精密操作:直驱结构控制精度最高,适用于遥操作、微装配等高精度场景。

五、开发流程的协同与迭代
5.1 步骤间的相互影响
产品开发并非线性推进的过程,各步骤之间存在紧密的相互影响:
PRD定义的功能需求约束架构堆叠的可行性;架构堆叠确定的尺寸边界影响驱动器选型范围;驱动器规格确定后又反过来约束硬件接口和结构细节。这种相互影响贯穿整个开发流程,设计团队需要建立系统性的变更管理机制。
5.2 常见的迭代场景
性能指标调整:当某一性能指标难以通过现有方案实现时,可能需要回溯调整PRD中的功能定义,或重新评估成本预算。
供应商约束:关键器件的供货周期或技术参数可能迫使架构方案进行妥协,需要在早期阶段充分评估供应链风险。
测试验证反馈:原型测试阶段发现的问题可能要求回退至原理设计或架构堆叠阶段进行修改,形成多轮迭代。
5.3 文档管理的重要性
在整个开发流程中,保持文档的同步更新至关重要。产品需求文档应记录每次变更的决策依据和权衡过程;架构堆叠文档应包含空间约束的验证结论;选型报告应保存供应商评估的完整记录。这些文档为后续的详细设计、问题追溯和产品迭代提供重要依据。
结语
机器人灵巧手的开发是一个系统工程,从PRD编写到详细结构设计,每个环节都需要严谨对待。产品需求文档定义了目标,架构堆叠验证了可行性,驱动器选型确定了性能边界。三者相互影响、动态调整,最终支撑后续的运动学动力学计算和详细结构设计。
合理的开发流程不能避免所有变更,但能够将变更的代价降到最低。前置环节投入足够的时间进行充分验证,可以有效避免后续阶段的重大返工。这正是产品开发中“先慢后快”原则的核心要义。
