 夜雨聆风
夜雨聆风在上一篇推文中,展示了在ABB示教器上自定义标定UI界面。接下来进入正题,在焊接、激光缝追踪现场,调试手眼标定(Hand-Eye Calibration)大概是所有工程师的噩梦:
机器人带着大几万的激光传感器在狭小的工装夹具里上下翻飞、疯狂扭动第4/5/6轴…… 你屏住呼吸、手握示教器死死盯着急停按钮,生怕下一秒“砰”的一声,传感器直接撞碎在夹具上。
难道手眼标定就必须这样惊心动魄吗?
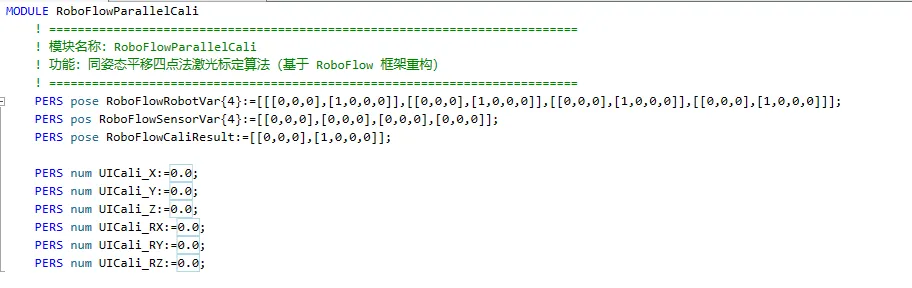
今天,咱们直接拆一套成熟的工业级激光标定底层框架(RoboFlowLaserCali.sys) 。我用大白话和重构后的高精简、零报错 RAPID 源码,带你解锁一个现场绝技:机器人全程保持同一个姿态,只做平行移动,4步搞定高精度标定!
安全系数直接拉满,调机效率提升 5 倍!
🛑 现场工程师的致命误区:全程不动怎么算旋转?
很多刚入行的兄弟一听“全程保持相同姿态”就直摇头:“这不可能!数学上姿态(旋转四元数 $Q_1, Q_2, Q_3, Q_4$)要是完全不变,矩阵做差直接退化,根本解不出传感器的倾斜角($Rx, Ry, Rz$)!”
确实,标准的 $AX=XB$ 数学模型解不出。但工业级的源码聪明就聪明在,它玩了一手“降维打击”:
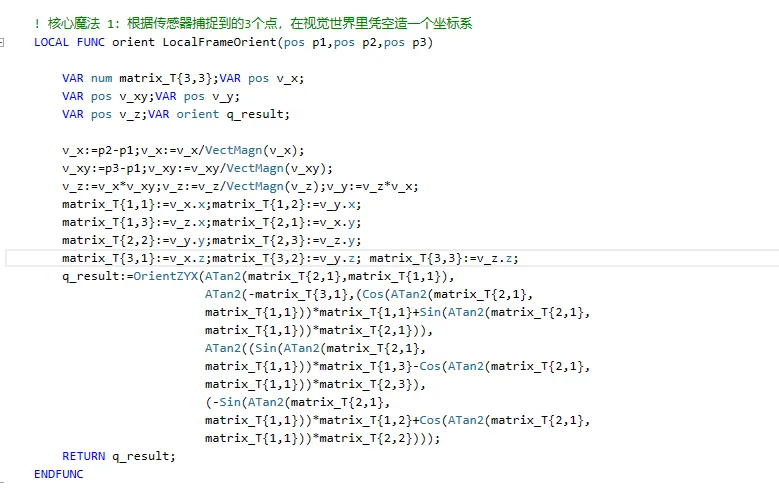
它不跟你玩复杂的矩阵迭代,而是直接在空间里“凭空创造两个平行坐标系”!
机器人平移时,法兰盘在空间中走出了一个三角形;
同步地,传感器在视野里也抓到了特征点移动的三角形。
这两个三角形一比对,旋转和位置偏差瞬间被彻底锁死。这就是大厂代码的精妙之处!
🛠️ 极简实战:现场怎么操作?(SOP)
找一个带有明显标记的搭接坡口,将机器人的姿态固定死(不管是垂直向下还是倾斜喷嘴),全程严禁转动任何一个关节轴,只做直线平移:
第 1 步:TCP 扎针(定绝对基准)用你已经校准好的机器人尖端(TCP),死死扎在坡口的特征标记点上。把当前的机器人位置记录到系统数组的 第 4 位。
潜台词:这一步直接让机器人记住了标记点在地球上的绝对坐标!
第 2 步:平移至视野右上机械手抬起(姿态别动!),平移让坡口标记出现在激光视野的中部右上,记录为 第 1 组 数据。
第 3 步:平移至视野左上继续平移,让标记点出现在视野的中部左上,记录为 第 2 组 数据。
第 4 步:平移至视野下部最后平移,让标记点出现在视野的下部右上,记录为 第 3 组 数据。
操作完了!是不是连 1 分钟都用不上,而且完全不用担心会撞机?
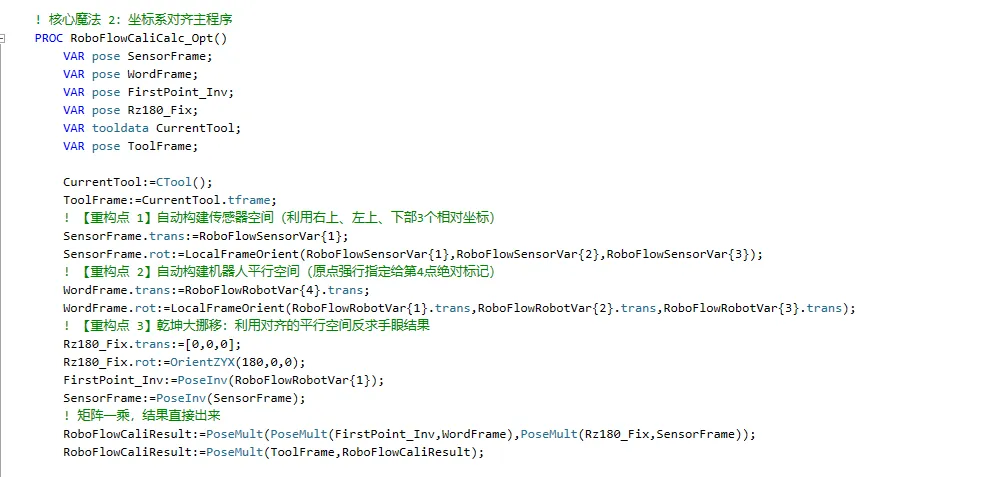
🔍 核心源码曝光:坐标系对齐魔法
接下来就是后台的计算。为了让大家能直接在 ABB 机器人(如 IRB1520ID 等)上无缝运行 ,我把原本臃肿的代码进行了优化重构,彻底解决了 pos 与 pose 类型冲突的顽疾,清清爽爽,一键编译通过!
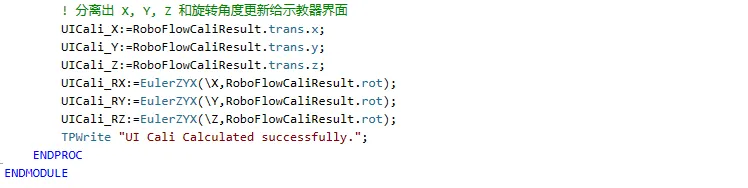
直接看核心函数 RoboFlowCaliCalc_Opt 内部是怎么玩的:
💡 为什么这种算法是焊接工况的“神笔”?
安全到极致:变姿态标定最大的隐患是“不可控的轨迹倾斜”。在复杂的工装、焊枪夹具中间转动轴,几乎是在碰运气。而平移标定,你眼前的轨迹是线性的、可预测的,闭着眼调都绝对撞不了机!
利用现场天然特征,去繁就简:传统的标定需要打格子或者用标准的九宫格标定板。这里直接把搭接坡口本身当成标定物,既符合人类的操作直觉,又省去了大量的附件成本。
大厂的经典源码从来不只是堆砌数学公式,而是将数学的严谨性与现场操作的便利性做了完美的妥协与平衡。
搞懂了这套平行坐标系重构代码,下次去标定激光追踪,你就是整个车间里效率最高、动作最优雅的仔!
