 夜雨聆风
夜雨聆风和利时IAT平台软件入门第二讲

前言
从上次和利时IAT平台软件入门第一讲之后,小编看到对于IAT平台大家还是抱有较大热情的。由于篇幅有限,肯定有很多地方不甚详细,大家可以边参考边摸索,同时也可以一起交流探讨。
今日第二讲我们主要从通用程序常用功能指令、基本通讯的构建、软件功能Tips三方面介绍。继第一讲的内容,让大家愈加完善对IAT的基本应用。
1、常用功能指令
1.1 模拟量处理指令
常用的有模拟量输入处理指令“HEX_ENGIN”、模拟量输出处理指令“ENGIN_HEX”。
两者使用类似,只是工程量和码值数据处理互为反向。
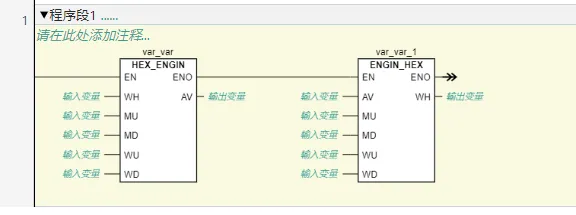
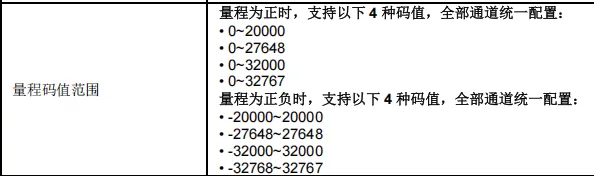
指令较为简单,有两点稍注意,第一点是输入输出数据类型按指令说明定义准确(如需求其他输入输出数据类型,可再借助数据类型转换指令),第二点是码值范围引脚参数要依据手册支持的码值范围,并且结合硬件组态部分的实际设置,如下所示。

模拟量现场采集中的温度采集--热电阻/热电偶不同于普通模拟量,和利时PLC一般都支持直接输出为温度值形式,则不需要上述模拟量输入处理指令块。
1.2 时钟指令
这里先引申下和利时PLC硬件的普遍特性:控制器辅助配件-电池,作用是保持系统实时时钟。而IAT平台对应的硬件控制器LX紧凑型系列,在电池这一块,也是作为选配件,如果需要就加上它。不加控制器电池情况下,实时时钟功能无法保证。
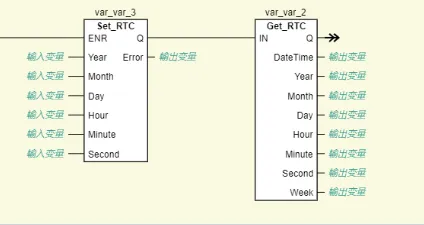
下图就是系统实时时钟的两个小指令:SET_RTC和GET_RTC,分别是设置和获取实时时钟参数如年月日时分秒,指令较为简单,但是区别于有些外资品牌,我们也了解下以便投入应用中。与时钟相关的,还有日历获取、IEC任务周期等时间指令,有兴趣的可以自行看下。另外,IAT平台下硬件支持NTP校时,位置在菜单栏-工具-控制器校时。
1.3 通讯指令
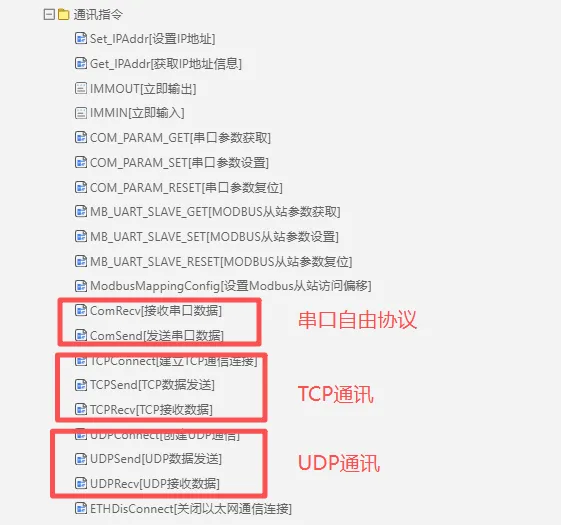
以LX紧凑型为例,支持的通讯形式主要包括串口通讯、以太网通讯。其中串口通讯包括Modbus RTU、串口自由协议,以太网通讯包括Modbus TCP、TCP/IP、EIP、OPC、PN(RT从站)等。
串口自由协议、以太网自由协议涉及具体的通讯指令,如下图所示。而上述其他的通讯多以组态方式直接去实现,这个我们放到第二部分去了解。
1.4 PID指令
说起PID调节功能我们大多不会陌生,在诸多需要自动调节工程量的领域都必不可少。
鉴于它的功能引脚看着较繁琐,这里详细解析说明下。
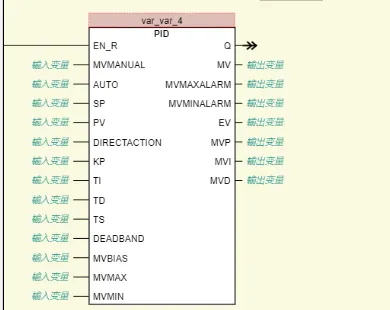
MVMANUAL--手动输入值,即手动模式下,功能的输入值;
AUTO--手自动切换 0是手动 1是自动;
SP--设定值,即自动模式下,功能的输入值;
PV--反馈值,即调节目标的实际状态反馈;
DIRECTACTION--作用方向,即调节作用方向;
KP/TI/TD--比例积分微分参数;
TS--运算周期;
DEADBAND--偏差死区限,即偏差小于多少不进行调节;
MVBIAS--前馈增益,即调节计算值+前馈增益=输出值;
MVMAX/MVMIN--输出的上下限值;MVMAXALARM/MVMINALARM--输出上下限报警
输出主要就是MV,EV是计算偏差值,比例积分微分分量可不过多关注。
2、基本通讯的构建
在前面我们提到了,串口自由协议和以太网自由协议的实现要借助于相关指令块。而更为常用的标准协议通讯,IAT平台主要是以组态方式来实现的。
以下部分内容,在我前边写的《和利时PLC的ModbusRTU通讯概述》中也有所涉及,可以参考对照了解。
2.1 作为Modbus RTU/Modbus TCP从站
作为Modbus RTU或Modbus TCP从站,是非常简单的,实现方式类似,以RTU从站为例,如下图所示,只需要左侧组态上Modbus slave然后右侧属性选填好地址、任务绑定及传输格式。
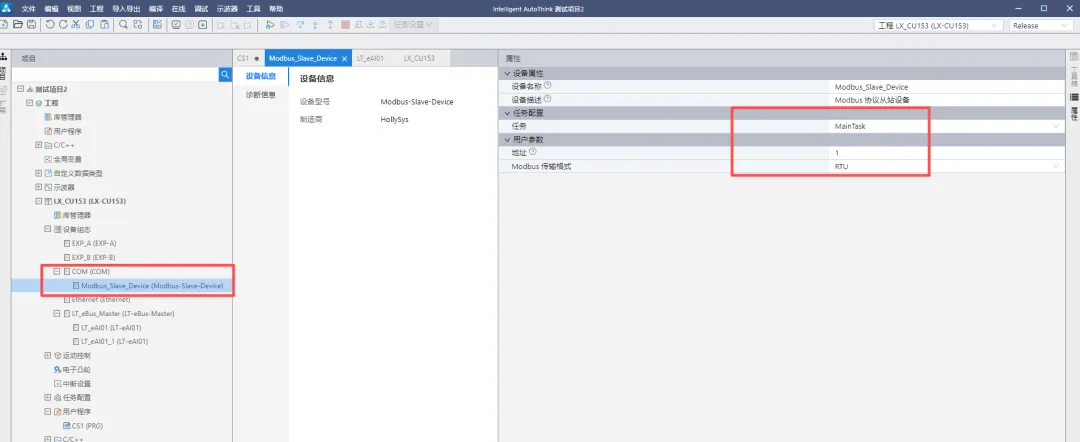
当然,我们之前讲到过,串口节点“COM”处双击,需要编辑好COM的参数,无论作为主从,这里稍提及一句。
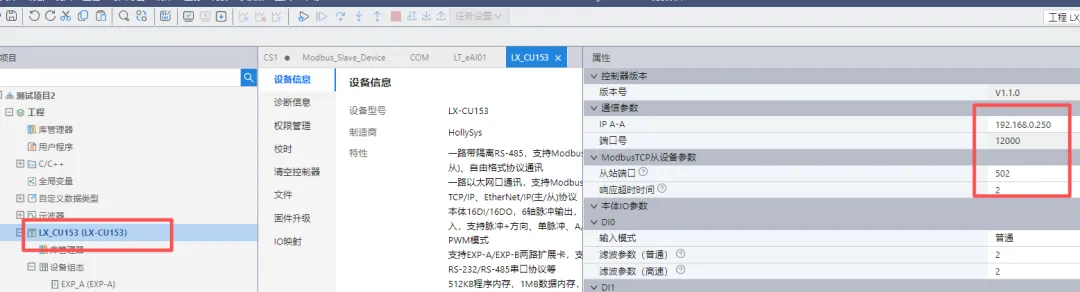
Modbus TCP从站组态:双击控制器节点、右侧IP/端口号/响应超时参数编辑好即可。这里说明一下,未涉及站号这一参数,如彼端主站需要设则按默认值即可。
2.2 作为Modbus RTU/Modbus TCP主站
作为ModbusRTU/Modbus TCP主站两者相似,这里以作Modbus TCP主站为例。
如图示右键ETHERNET节点添加Mosbus_MASTER主协议,然后右键Mosbus_MASTER再添加若干从站,然后双击ModbusSLAVE节点,编辑从站设备属性页面。
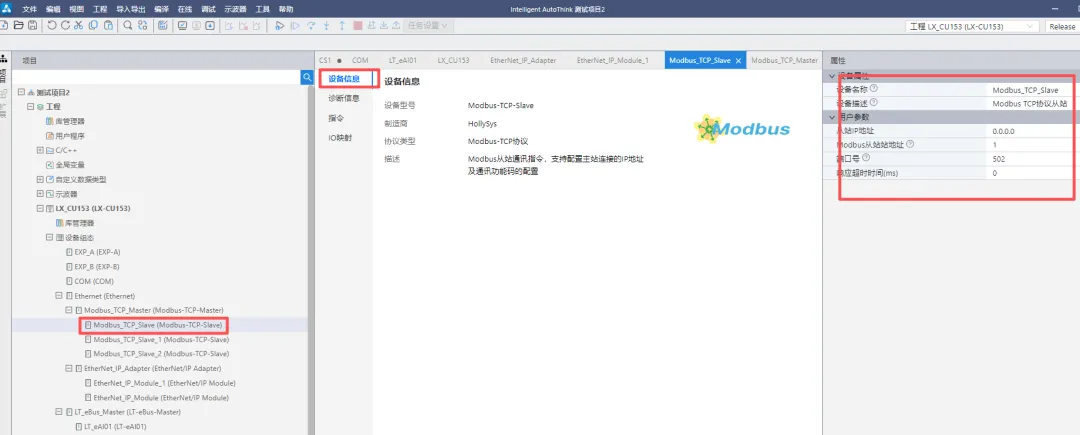
下一步是添加从站指令
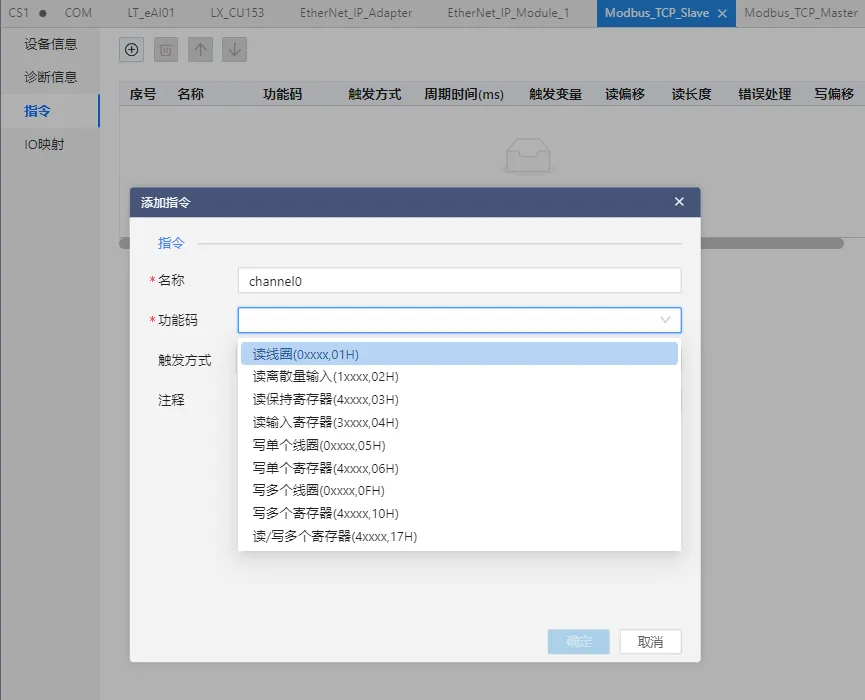
最后生成本地地址映射,就可以拿到POU中进一步处理了。

2.3 其他通讯
EIP通讯类似Modbus TCP的组态,除常规通讯,也可在导入相关设备描述文件基础上,组态第三方设备。这一点同样适用Ethercat(LX中型及部分LX紧凑型原生支持总线协议);
OPC通讯同样在组态方式实现,注意以LX紧凑型来讲,LX-CU33X三个型号才可支持。
3、软件功能Tips
3.1 项目设置
在菜单栏-工程-项目设置项,或软件左下角齿轮标志按钮处找到设置项,可对工程编辑、软件平台等显示操作进行设置。如工程下装前的比较、直接地址的对齐方式、变量定义区文本/表格显示等。
3.2 变量/程序索引
菜单栏-视图中,可以选择变量交叉引用索引、统计未使用变量、程序的调用引用等等。当然,WINDOWS风格的CTRL+F也是可以找变量引用位置的。
3.3 关于导入导出
设备描述文件导入:菜单栏-工具-设备管理器;
变量/程序导入导出:菜单栏-导入导出,包括常规POU、变量及网络公开变量,其中PLCOPENXML是针对第三方如COSESYS平台程序的导入功能;
外来工程导入:建议是.hdat格式(即标准存档格式),找到工程恢复功能恢复该工程文件,恢复后的工程文件进入准入列表目录,然后文件打开该工程即可。
3.4 示波器功能
IAT平台软件支持YT表形式示波器功能,常用于触发或连续的变量监听。
操作方法:左侧项目树--示波器--右键YT表节点添加监视组--右键监视组添加若干变量,然后余下操作在线状态下的变量监听显示及YT表的一些常规操作。
3.5 目标控制器及调试模式
结合第一讲,IAT平台是项目之下多工程、工程之下多系统的架构,所以针对具体控制器的处理尤其是在线操作,优先在软件右上方选择好对应控制器。
调试模式:DEBUG和RELEASE,默认RELEASE即可,DEBUG发生在ST或C语言编辑调试时候的断点调试选择。
OK,以上就是本次分享的内容
小编想说的是,篇幅有限,毕竟不能绝对详尽,只希望能对大家应用起到好的引导作用。
本次分享主题开始说了是三次,下次第三讲预告围绕基本运动控制功能、C语言的基本应用。
最后,感谢大家百忙中观看,也请指教和关注!
