夜雨聆风
夜雨聆风一、整体架构同源性与核心差异概述
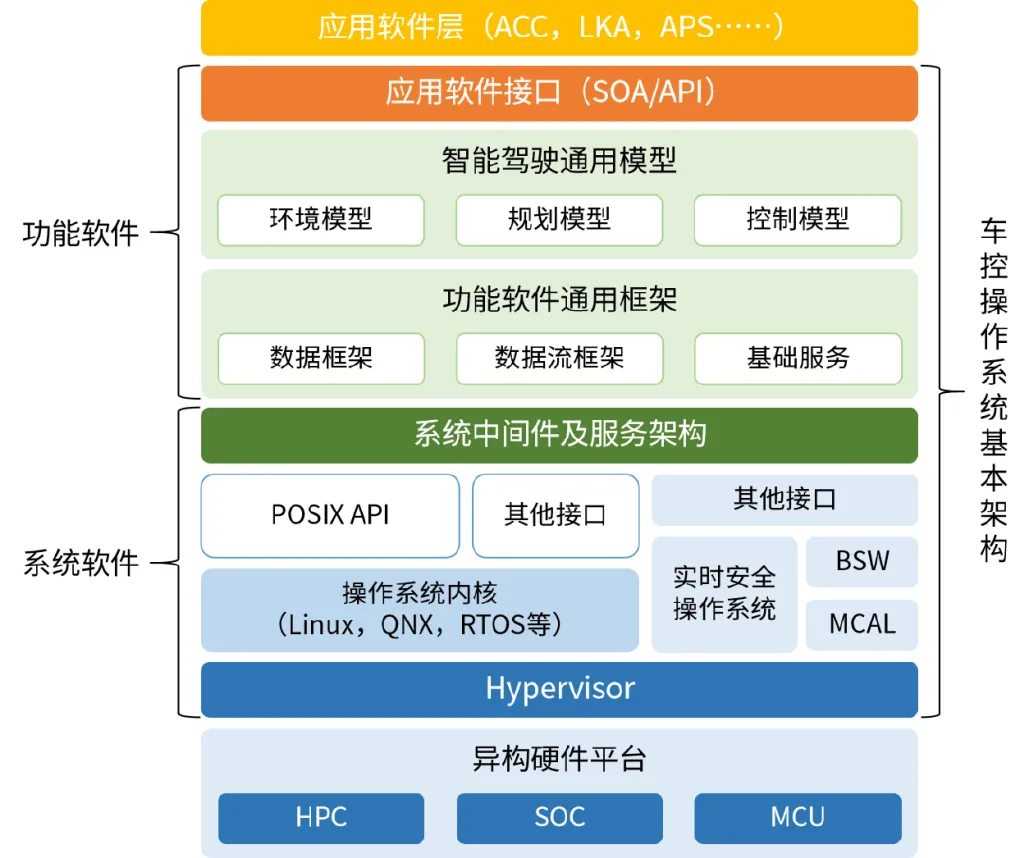
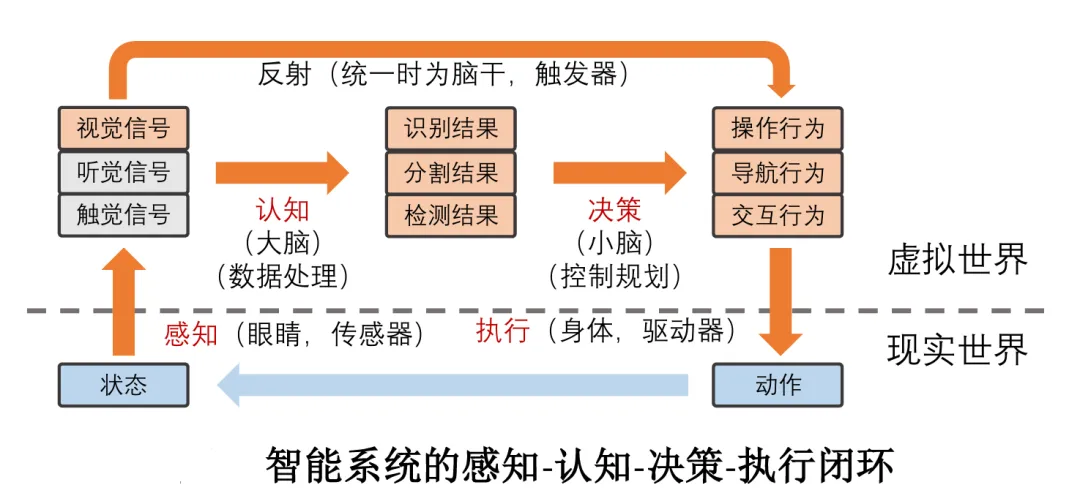
二、整体架构设计逻辑对比
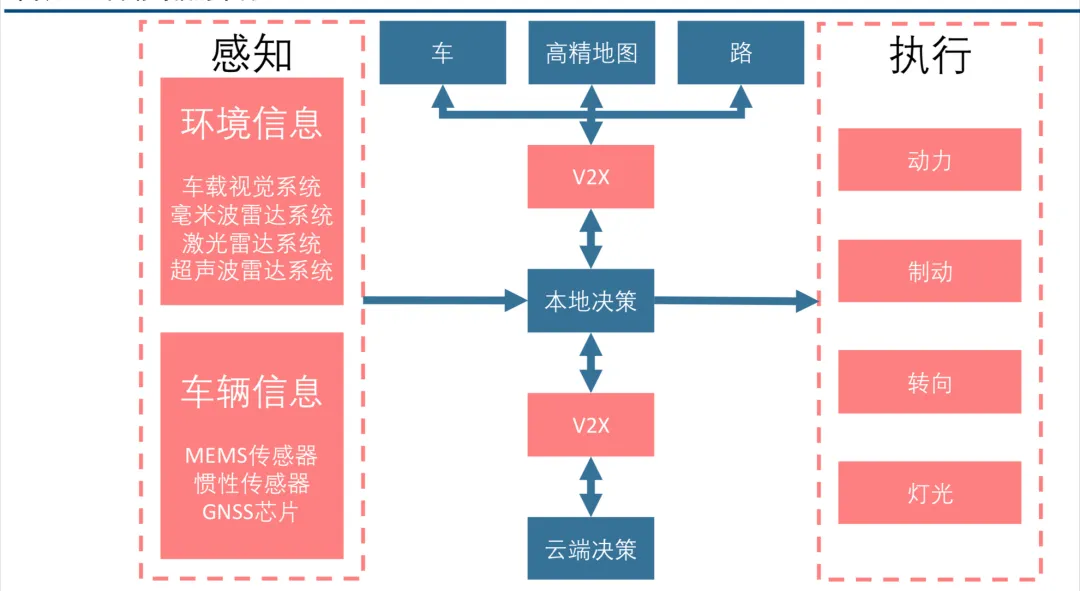
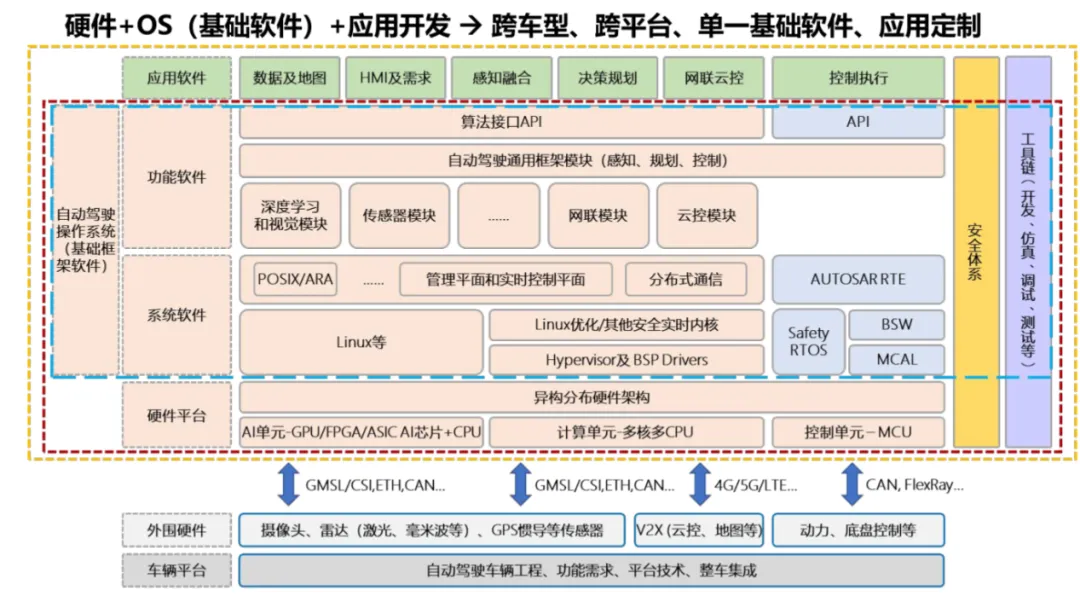
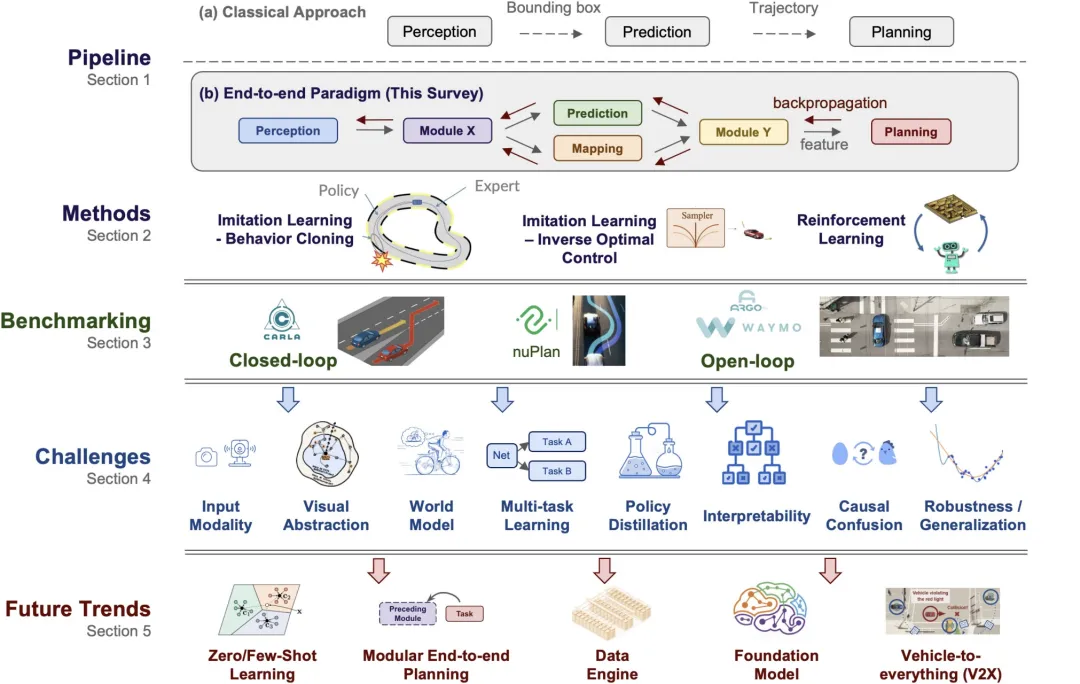
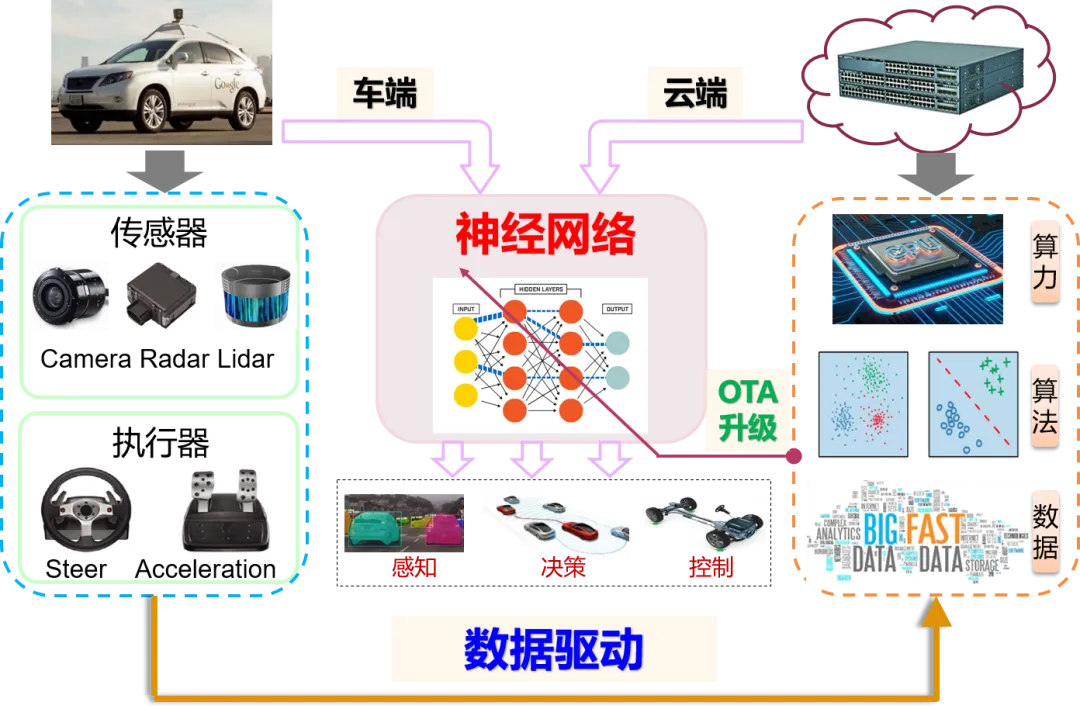
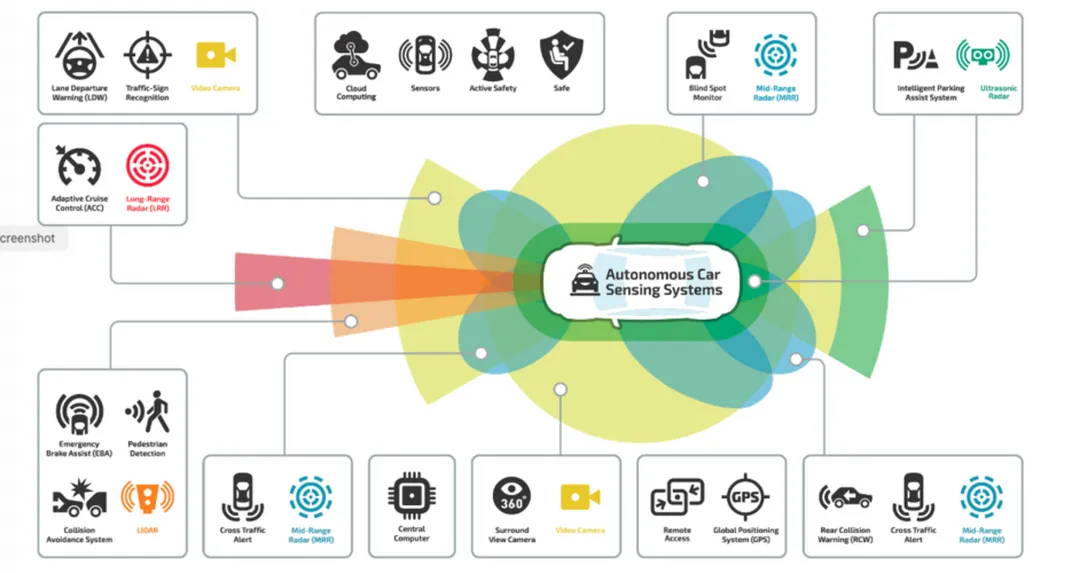
2.1 智能驾驶架构设计特点
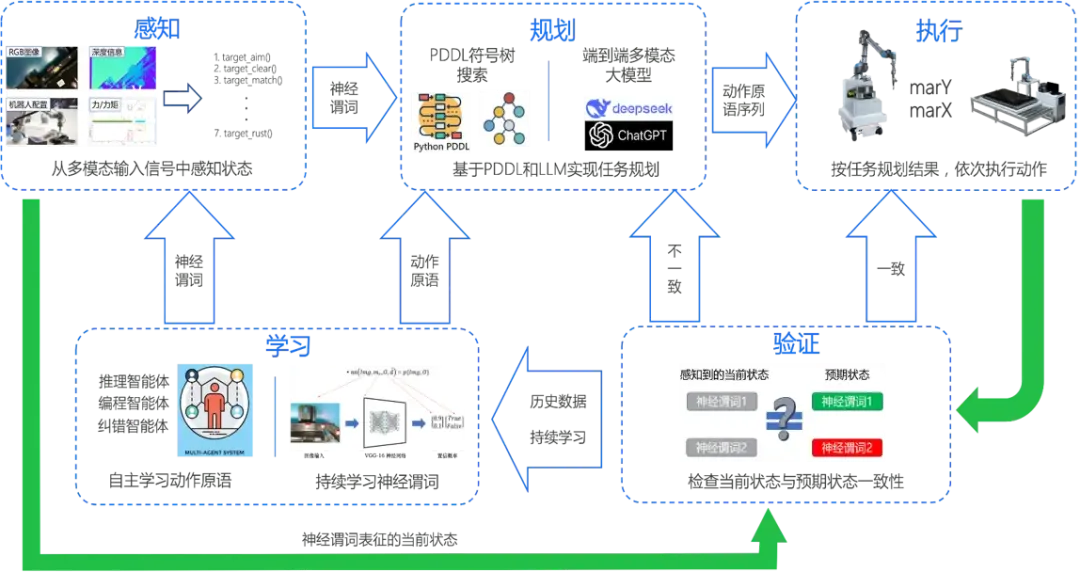
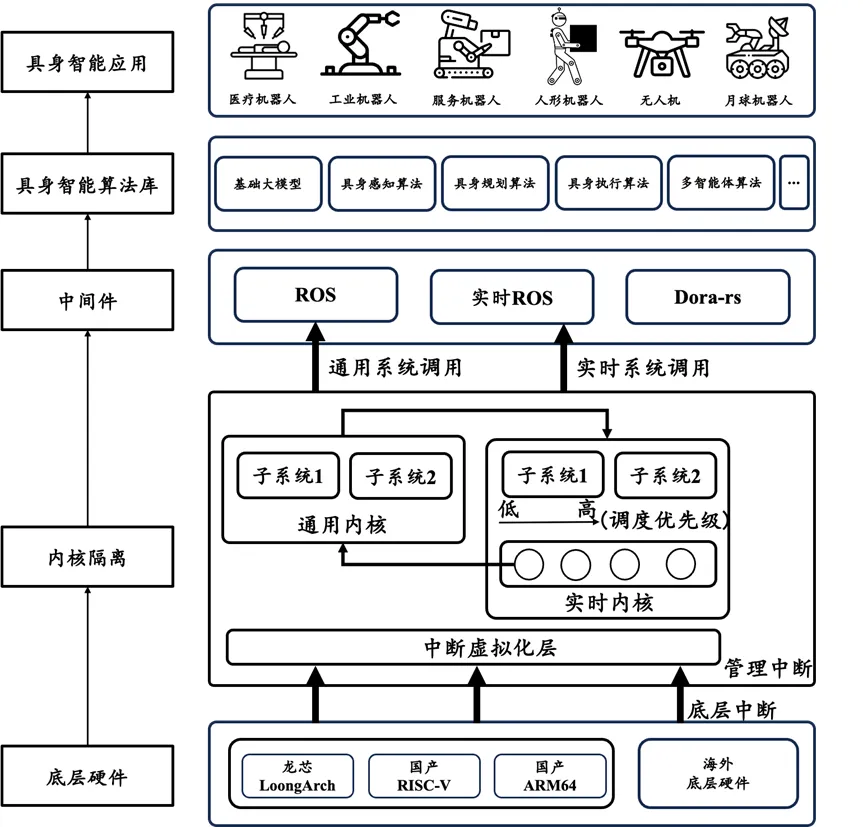
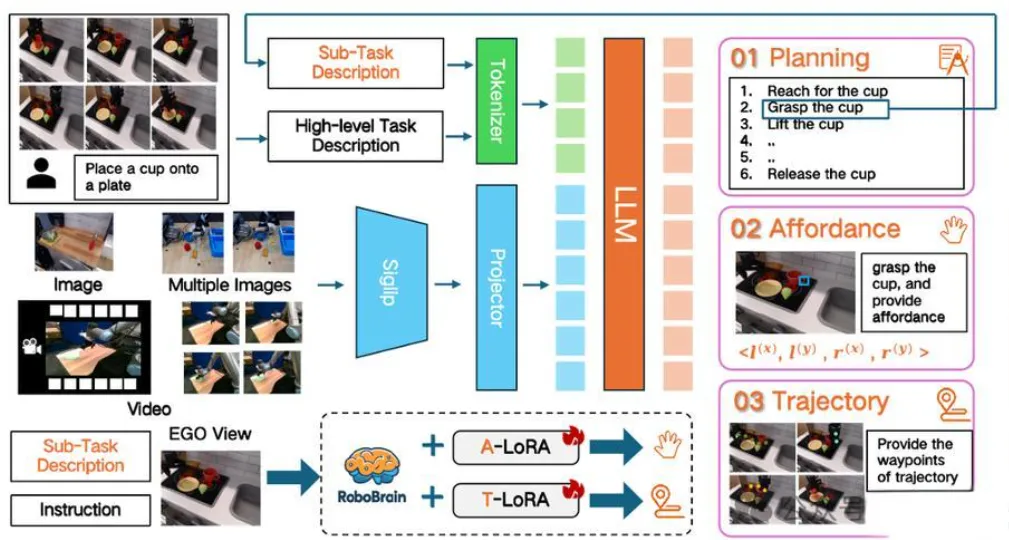
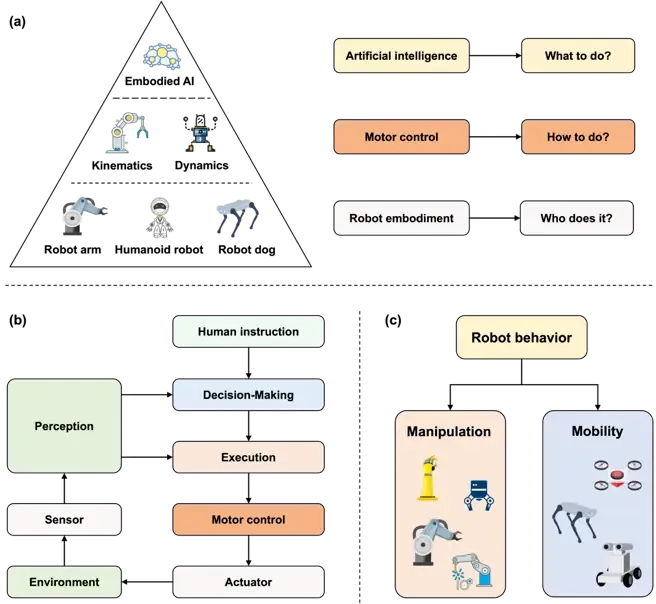
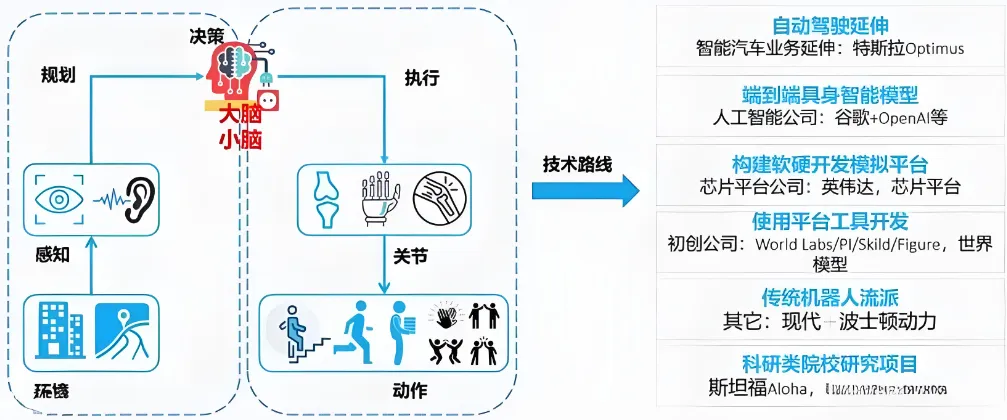
2.2 通用具身智能架构设计特点
三、核心功能模块架构差异
3.1 感知模块差异
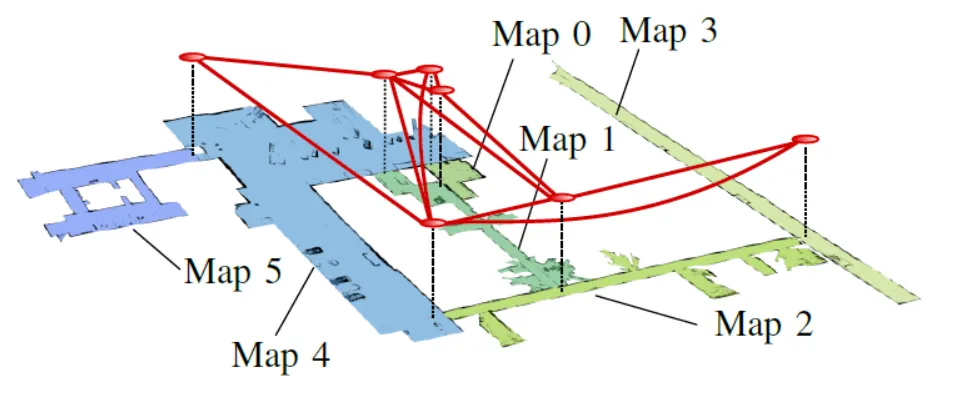
3.2 定位与建图模块差异
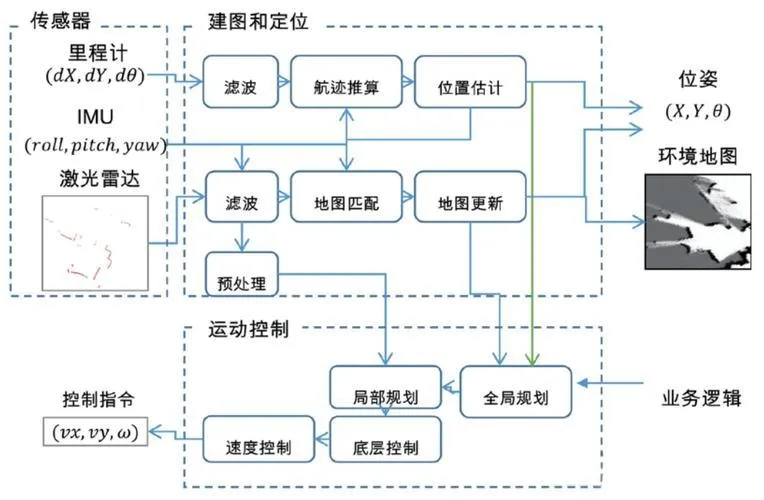
3.3 决策规划模块差异
3.4 控制执行模块差异
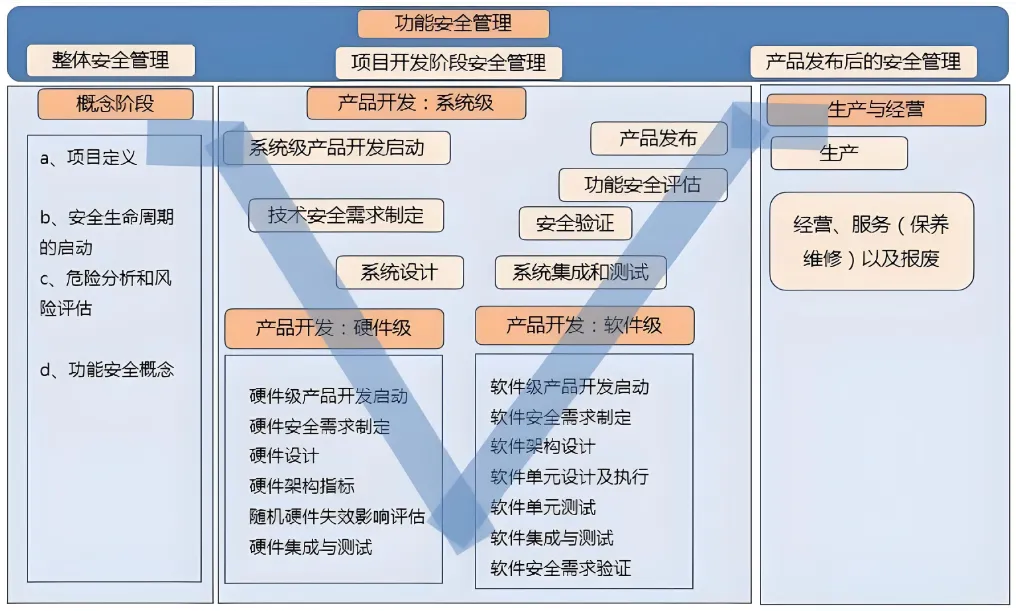
3.5 系统安全架构差异
四、核心维度参数对比汇总
对比维度 | 智能驾驶 | 具身智能 |
安全等级 | ASIL-D最高等级,零致命错误容忍 | 常规功能安全,允许非致命错误与重试 |
响应延迟 | 感知延迟<100ms,控制延迟<50ms,极致稳定 | 整体延迟100-500ms,力控场景可适配1s延迟,容错性高 |
算力功耗 | 算力500-1000TOPS,功耗200-500W,高算力高功耗 | 算力50-200TOPS,功耗50-100W,轻量化低功耗 |
环境复杂度 | 结构化标准道路,规则明确、场景固定 | 非结构化室内外场景,环境杂乱、无固定规则 |
核心任务类型 | 单一闭环任务:安全、合规、稳定完成A点到B点行驶 | 通用多元任务:搬运、装配、服务、人机交互、精密操作等 |
学习迭代机制 | 云端批量训练、车端固定推理,全程禁止在线试错 | 端侧实时自监督学习、强化学习,支持在线试错迭代优化 |
五、技术演进趋势分析