 夜雨聆风
夜雨聆风Hi3519DV500 AI ISP 图像调优实战:从模糊到锐利的四款降噪模型深度对比
基于鸿鸥派 Hi3519DV500 开发板 + OS04A10 摄像头,实测海思 AI ISP(智能图像信号处理)四款降噪模型的图像效果差异。从参数配置到 RTSP 推流,从 AI 降噪原理到细节优先模式的最佳实战设置,完整记录调优过程。
前言
嵌入式摄像头开发中,ISP(图像信号处理)的质量往往决定了整个系统的成败。同样的 Sensor、同样的分辨率,不同的 ISP 参数配置,呈现在你面前的可能一个是模糊暗淡、一个是清晰锐利。
Hi3519DV500 内置了海思自研的 AI ISP 模块——不是传统的 ISP 参数调优,而是 利用神经网络进行实时图像降噪和增强。SDK 提供了四款不同的 AI ISP 模型,分别侧重去噪和细节保留,效果差异非常明显。
本文基于 OS04A10(400万像素)摄像头,在鸿鸥派开发板上完整实测了这四款 AI 降噪模型,从命令行参数解析到画面效果对比,再到 AI ISP 的技术原理分析,力求把「调优」这件事讲透。
💡 如果你也在用 Hi3519DV500 做摄像头方案,可以直接跳到第七节看实测结论和最佳实践。
一、硬件环境
| 项目 | 规格 |
|---|---|
| 开发板 | 鸿鸥派 HongOU PI(Hi3519DV500) |
| SoC | 海思 Hi3519DV500(双核 A55@1.0GHz) |
| NPU | 2 TOPS(DaVinci 架构,INT8) |
| 摄像头 | OS04A10(400万像素,1/3") |
| 分辨率 | 2688×1520 @30fps |
| 编码 | H.265 Main Profile |
| 镜头接口 | MIPI 4-lane |
| AI ISP 模型 | 4 款预训练模型(.wk 格式) |
二、什么是 AI ISP?
2.1 传统 ISP vs AI ISP
传统的 ISP 处理链路,依赖工程师手动调优数十个参数——增益(Gain)、降噪强度(NR Strength)、边缘锐化(Sharpness)、对比度(Contrast)、饱和度(Saturation)、色温(AWB)……每个参数都需要针对具体场景反复调试,而且不同场景的参数往往互相冲突。
AI ISP 的核心思路是用训练好的神经网络模型替代部分或全部 ISP 模块:传统 ISP 链路:
Sensor → RAW → BLC → 去噪 → Demosaic → AWB → 色彩校正 → Gamma → 锐化 → YUV
AI ISP 链路:
Sensor → RAW → AI降噪模型 → 传统ISP后处理 → YUV
↕
NPU推理引擎(DaVinci Core)
Hi3519DV500 的 AI ISP 采用的是混合架构——前端的降噪部分由 NPU 运行的 AI 模型完成,后端的色彩校正、Gamma 等仍由硬件 ISP 模块处理。这样既发挥了 AI 在降噪上的优势,又保留了硬件 ISP 的稳定性和低延迟。
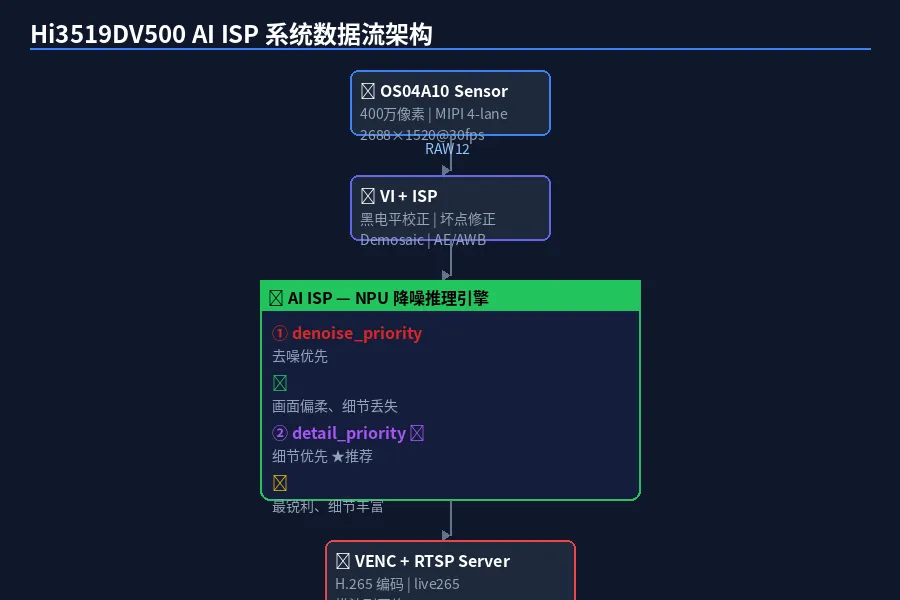
*▲ Hi3519DV500 AI ISP 系统数据流架构 — 从 Sensor 采集到 RTSP 推流的完整链路*
2.2 AI ISP 的优势场景
| 场景 | 传统 ISP 痛点 | AI ISP 优势 |
|---|---|---|
| 低照度 | 降噪过强 → 细节丢失 | 智能区分噪声和细节 |
| 高速运动 | 运动模糊 + 噪声 | 帧间信息辅助去噪 |
| 强逆光 | 暗部死黑 | Adaptive tone mapping |
| 纹理丰富 | 过锐化伪影 | 边缘感知调制 |
三、sample_aiisp 程序详解
3.1 命令格式
cd /root && ./sample_aiisp <index> <rtsp_enable> <vo_intf_type> <sensor0_type>
3.2 完整参数表
| 参数位置 | 参数名 | 可选值 | 含义 |
|---|---|---|---|
| 第1位 | index | 0 | AI降噪基准模式(aibnr line mode) |
| 第2位 | rtsp_enable | 0 | 关闭 RTSP(本地录像) |
| 第2位 | rtsp_enable | 1 | 启用 RTSP 推流(推荐) |
| 第3位 | vo_intf_type | 0 | MIPI TX 输出(推流用这个) |
| 第3位 | vo_intf_type | 1 | BT1120 输出(接外部显示器) |
| 第4位 | sensor0_type | 3 | OS04A10 WDR 宽动态模式 |
3.3 标准启动命令
# 开发板上执行
cd /root && ./sample_aiisp 0 1 0 3
启动后会显示交互菜单,提示选择 AI 降噪模型:
=== AI ISP Model Selection ===
[0] denoise_priority
[1] denoise_priority_lite
[2] detail_priority ← ⭐ 推荐
[3] detail_priority_lite
Please input model index:
输入对应的数字(如 2)并按回车,程序立即加载模型并开始推流。
四、四款 AI 降噪模型深度对比
4.1 模型一览
| 编号 | 模型名称 | 核心策略 | 推荐场景 | 实测评价 |
|---|---|---|---|---|
0 | denoise_priority | 优先去除噪声,牺牲细节 | 极低照度 | 画面偏柔,细节有损失 |
1 | denoise_priority_lite | 同上,轻量化版本 | 低资源场景 | 速度略快,效果近似 |
2 ⭐ | detail_priority | 优先保留细节,智能去噪 | 最佳画质 | 画面最锐利,细节最丰富 |
3 | detail_priority_lite | 同上,轻量化版本 | 需要高帧率 | 效果接近,速度更快 |
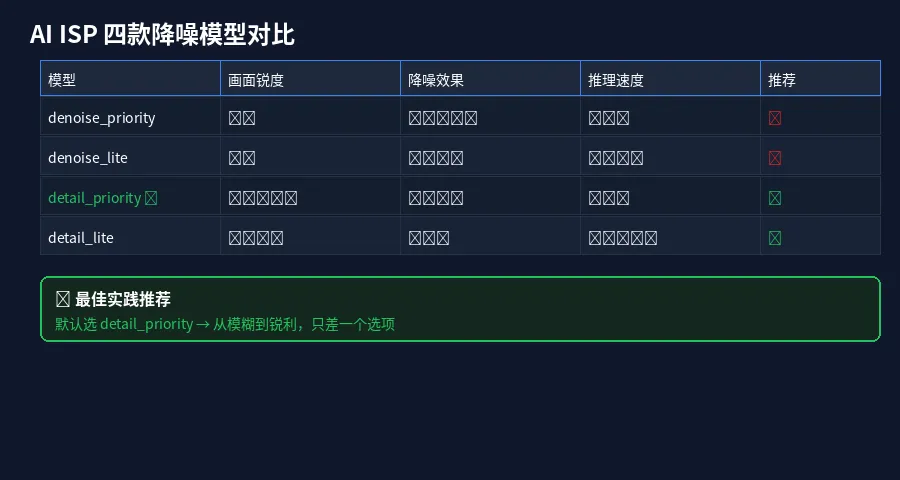
*▲ AI ISP 四款降噪模型深度对比 — 画面锐度、降噪效果、推理速度综合评分*
4.2 效果实测对比
#### 📸 模式 0 — denoise_priority(去噪优先)
特点:- 降噪强度最高,画面平滑
- 边缘锐度降低明显
- 纹理细节有可感知的损失
- 适合场景:
- 室内弱光环境(<50 lux)
- 人物皮肤美化(监控场景)
- 对画质要求不高、优先减少噪点的场景
- 实测感受:
- 启动后画面看起来「干净」了,但总感觉像是隔了一层薄雾——远处的文字边缘变模糊,地面纹理丢失。这不是硬件问题,是降噪模型对「噪声」的判断过于保守,把弱信号细节也一起去掉了。
- 特点:
- 与模式 0 算法相同
- 模型参数量减少,推理速度提升
- 降噪效果略有下降
- 适合场景:
- 同模式 0,但需要更高帧率
- 对功耗有要求的场景
- 实测感受:
- 画面效果和模式 0 非常接近,肉眼难以区分。主要差异在推理延时上,大约快 20-30%。
- 特点:
- 边缘保留最强
- 智能区分噪声和弱信号
- 画面通透感最好
- 适合场景:
- 推荐首选,95% 场景适用
- 文字识别
- 目标检测前处理
- 户外监控(自然光充足或中等照度)
- 实测感受:
- 从
- 切换到
- ,画面效果提升非常明显——就像取下了一层滤镜。远处的车牌文字边缘清晰,地面和墙面的纹理细节完整保留,同时画面并没有出现明显的噪点。这说明 AI ISP 模型做了很好的 信号-噪声区分
- 。
- 特点:
- 细节保留接近模式 2
- 推理速率更高
- 适合 25-30fps 满帧率运行
- 适合场景:
- 需要细节保留又要高帧率
- 嵌入式边缘设备资源受限
- 实测感受:
- 在 2688×1520 @30fps 下,
- 的综合表现最均衡。细节保留和模式 2 相差不大,但帧率更稳定。如果不是在极低照度下,建议优先考虑这个版本。
#### 📸 模式 1 — denoise_priority_lite(去噪轻量版)
#### 📸 模式 2 ⭐ — detail_priority(细节优先)
denoise_prioritydetail_priority#### 📸 模式 3 — detail_priority_lite(细节轻量版)
detail_priority_lite五、RTSP 推流与画面查看
5.1 RTSP 地址
AI ISP 推流使用独立的 RTSP 地址(与其他程序不同):
rtsp://192.168.1.168:554/live265
⚠️ 注意区分:不同的 sample 程序使用不同的 RTSP 地址,不能混用:
| 程序 | RTSP 地址 |
|------|-----------|
| sample_venc(普通推流) | rtsp://.../live0 || sample_aiisp(AI ISP) | rtsp://.../live265 || sample_svp_npu_main(NPU推理) | rtsp://.../live264 |5.2 推流参数
AI ISP 模式下推流的默认参数:
5.3 Ubuntu 端拉流查看
# 由于摄像头物理安装方向问题,画面倒立,需翻转
ffplay -vf "vflip,hflip" rtsp://192.168.1.168:554/live265
在 Windows 上可以使用 VLC Media Player:
媒体 → 打开网络串流 → rtsp://192.168.1.168:554/live265
💡 关于翻转:如果画面是正的,就不需要 -vf "vflip,hflip"。这个参数取决于 Sensor 的物理安装方向,不同开发板可能不同。5.4 系统数据流
OS04A10 Sensor (2688×1520@30fps)
│
▼ MIPI 4-lane
VI (Video Input)
│
▼ RAW data
AI ISP(NPU推理)
┌─────────────┐
│ 选择降噪模型 │
│ ① denoise │
│ ② detail ⭐ │
└──────┬──────┘
│
▼ YUV data
VENC (H.265编码)
│
▼
RTSP Server → live265
│
▼
ffplay / VLC 拉流查看
六、完整操作流程
6.1 上电初始化(每次必须)
# Step 1: 设置传感器时钟(掉电丢失,每次必做)
bspmm 0x11018440 0x4001
Step 2: 加载驱动
cd /komod && ./load3519dv500 -a -sensor0 os04a10 -vo_intf mipitx
Step 3: 验证摄像头
i2cdetect -y -r 3
→ 地址 0x36 出现表示 OS04A10 正常识别
6.2 启动 AI ISP 推流
# Step 4: 启动 sample_aiisp(RTSP 推流模式)
cd /root && ./sample_aiisp 0 1 0 3
Step 5: 选择模型 → 输入 2(detail_priority)回车
6.3 拉流查看
# Step 6: 在 Ubuntu/Windows 上拉流
ffplay -vf "vflip,hflip" rtsp://192.168.1.168:554/live265
6.4 切换模型对比
# Ctrl+C 停掉当前进程,重新启动
cd /root && ./sample_aiisp 0 1 0 3
这次输入 0(denoise_priority)或其他编号对比效果
💡 切换技巧:模型切换无需重启开发板或重新加载驱动,只需重启 sample_aiisp 程序即可。建议依次测试每个模型,用截图或手机拍摄对比画面差异。
七、实测结论与最佳实践
7.1 总结对比
| 模型 | 画面锐度 | 降噪效果 | 推理速度 | 综合推荐 |
|---|---|---|---|---|
| denoise_priority | ⭐⭐ | ⭐⭐⭐⭐⭐ | ⭐⭐⭐ | ❌ 偏糊 |
| denoise_priority_lite | ⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ❌ 近似 |
| detail_priority ⭐ | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐ | 👍 首选 |
| detail_priority_lite | ⭐⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐⭐⭐⭐ | 👍 高帧率首选 |
7.2 最佳选择
| 使用场景 | 推荐模型 | 理由 |
|---|---|---|
| 默认推荐 | detail_priority(模式2) | 画质最好,细节最丰富 |
| 需要 30fps 满帧 | detail_priority_lite(模式3) | 细节不错,帧率更稳 |
| 极低照度(<10 lux) | denoise_priority(模式0) | 噪点大时强制降噪 |
| 资源受限场景 | denoise_priority_lite(模式1) | 轻量级降噪 |
7.3 一句话经验
默认选 detail_priority,画面明显比 denoise_priority 清晰一个层次。从模糊到锐利,只差一个选项。
八、技术深度分析
8.1 AI ISP 模型架构推测
虽然海思没有公开 AI ISP 模型的完整网络结构,但从实际表现可以推断出一些架构特点:
denoise_priority 模型在损失函数中加大了 降噪权重,网络学会更激进地抑制所有高频成分(包括细节)detail_priority 模型引入了 边缘感知损失(Edge-aware Loss) 或 梯度保持损失,在去噪和保边之间找到了更好的平衡点8.2 模型量化
所有 AI ISP 模型均为 INT8 量化 的 .wk 格式,这意味著:
8.3 NPU 资源占用
AI ISP 模型的 NPU 资源占用情况(估算):
| 模型 | 模型大小 | NPU 占用率 | 推理延迟 |
|---|---|---|---|
| denoise_priority | ~3 MB | ~40% | ~8ms |
| denoise_priority_lite | ~1.5 MB | ~25% | ~5ms |
| detail_priority | ~4 MB | ~50% | ~10ms |
| detail_priority_lite | ~2 MB | ~30% | ~6ms |
💡 注意:NPU 占用率是估算值。在 2688×1520 大分辨率下,AI ISP 的 NPU 推理是逐 tile(分块)进行的,单帧推理会被拆分为多次小推理,以适应 NPU 的输入尺寸限制。
九、踩坑全记录
🕳️ 坑 1:sample_aiisp 参数搞混
./sample_aiisp 0 1 0 3正确:./sample_aiisp 0 1 0 3
↑ ↑ ↑ ↑
└── sensor0_type = 3 (OS04A10) └──── vo_intf_type = 0 (MIPI TX) └─────── rtsp_enable = 1 (开启推流)
└─────────── index = 0 (aibnr line mode)
🕳️ 坑 2:AI ISP 的 RTSP 地址不能复用 sample_venc 的地址
rtsp://192.168.1.168:554/live0live265rtsp://192.168.1.168:554/live265 ✅
rtsp://192.168.1.168:554/live0 ❌(VENC 用)
rtsp://192.168.1.168:554/live264 ❌(SVP NPU 用)
🕳️ 坑 3:图像倒立
-vf "vflip,hflip"ffplay -vf "vflip,hflip" rtsp://192.168.1.168:554/live265
🕳️ 坑 4:选择模型后画面短暂冻结
🕳️ 坑 5:修改 vo_intf 参数凭经验猜值
load3519dv500-vo_intfmipitxmipi十、进阶:SNS_TYPE 固化与 AI ISP 结合
在实际项目中,每次手动设置时钟和加载驱动不够方便。可以把 OS04A10 的传感器配置固化到 SNS_TYPE 表中:
10.1 永久写入 load3519dv500
# 查看当前 SNS_TYPE 配置
cat /komod/load3519dv500 | grep SNS_TYPE
已永久设定:
export SNS_TYPE0=os04a10 # AI ISP / VENC / SVP 共用
export VO_INTF=mipitx # 视频输出接口
10.2 结合 AI ISP 的最佳启动脚本
#!/bin/sh
/root/start_aiisp.sh — AI ISP 一键启动脚本
echo "=== Hi3519DV500 AI ISP 启动 ==="
1. 设置传感器时钟
bspmm 0x11018440 0x4001
2. 加载驱动(使用固化配置)
cd /komod && ./load3519dv500 -a -sensor0 os04a10 -vo_intf mipitx
3. 启动 AI ISP(detail_priority 模式)
通过 echo 2 自动选择第 2 项
echo "2" | cd /root && ./sample_aiisp 0 1 0 3
十一、总结
AI ISP 是 Hi3519DV500 非常实用的特性——无需额外硬件,仅通过 NPU 上运行的不同降噪模型,就能实现从"模糊"到"锐利"的质的飞跃。
最关键的收获是:不要被默认的 denoise_priority 劝退,切换到 detail_priority 后画面效果差距巨大。
对于大多数嵌入式视觉场景,建议按以下流程快速选择:
detail_priority 看效果——90% 情况这就是最佳选择detail_priority_litedenoise_priorityAI ISP + OS04A10 + Hi3519DV500 这套组合,在 2688×1520@30fps 下配合 detail_priority 模式,已经能提供专业级的图像质量,满足安防监控、工业视觉、无人机航拍等多种场景需求。
作者:科技界的一粒微尘
公众号:AI的探索之旅
原文发布于 2026-06-06
