 夜雨聆风
夜雨聆风前面六篇都在讲系统怎么跑。这篇换个角度——跑完之后怎么查。
每次飞行结束,SD卡里会多出一个.ulg文件。这个文件就是PX4的"黑匣子",记录了飞行过程中几乎所有uORB topic的数据。出问题了翻日志,调参看日志,复盘也看日志。不会看日志,等于白飞。
我把uLog的格式、记录机制、分析工具链和常见排查套路整理一遍。
uLog文件格式:自描述的二进制流
uLog是PX4专用的日志格式,核心设计原则是自描述——文件里包含了自己的schema,解析器不需要外部定义文件就能读懂内容。
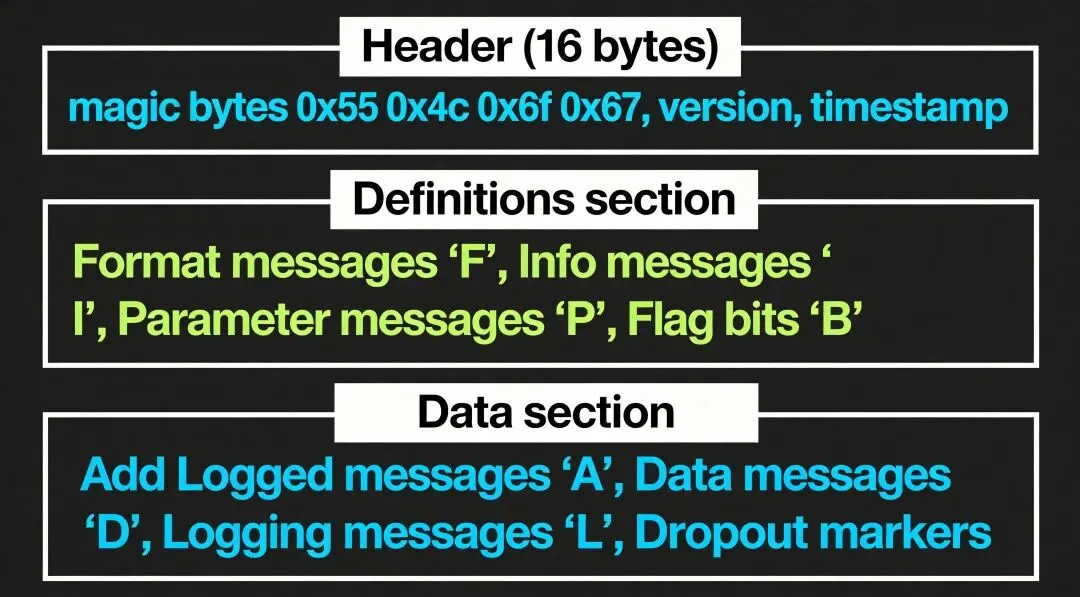
文件分三段:Header、Definitions、Data。
Header(16字节,固定长度)
| 0x55 0x4c 0x6f 0x67 0x01 0x12 0x35 | 0x01 | uint64_t |
| File magic (7B) | Version (1B) | Timestamp (8B) |
Magic字节是"ULog"加三个固定字节0x01 0x12 0x35。Version目前是1。Timestamp是日志开始时间(微秒)。就这16字节,简单粗暴。
Definitions段:schema在这里
这一段记录了消息格式定义、系统版本、初始参数。每条消息前面有个3字节的header(msg_size: uint16 + msg_type: uint8),msg_type用单字符标识:
'F'消息是最关键的,它定义了每个uORB topic的结构。比如:
sensor_combined:uint64_t timestamp;float[3] gyro_rad;float[3] accel_m_s2;
解析器读到这条定义后,就知道Data段里sensor_combined类型的消息该怎么拆字段了。这就是"自描述"——格式定义和数据一起存,不需要额外的IDL或proto文件。
Data段:飞行数据主体
'D'消息占Data段99%以上的空间。每条'D'消息只有3字节header + 2字节msg_id + 数据体,非常紧凑。
'L'消息是PX4运行时的printf输出,按Linux内核日志级别分类:0=EMERG、1=ALERT、2=CRIT、3=ERR、4=WARNING、5=NOTICE、6=INFO、7=DEBUG。出问题时先看'L'消息的WARNING和ERR,通常能直接定位。
'O'消息记录数据丢失。SD卡写入速度跟不上的时候,Logger会丢弃部分数据,记一个Dropout。如果看到大量Dropout,要么换更快的SD卡,要么减少记录的topic数量。
Logger模块:谁在写日志
Logger模块(src/modules/logger/)是uLog的写入引擎。它订阅uORB上的topic,按定义格式写入SD卡。
启动逻辑
Logger在系统启动时就运行,但默认只在解锁后才开始写日志(SDLOG_MODE=0)。写入流程:
解锁触发 → start_log_file()→ 写Header + DefinitionsDefinitions包括:write_header、write_version、write_formats、write_parameters、write_parameter_defaults 进入主循环,按配置的topic列表订阅并写入Data段 上锁触发 → stop_log_file()→ 关闭文件
记录哪些topic
Logger有一个默认的topic列表,定义在logged_topics.cpp里。默认记录的核心topic包括:
sensor_combined:IMU原始数据vehicle_attitude:姿态(四元数)vehicle_local_position:本地位置估计vehicle_global_position:全局位置估计vehicle_status:飞行状态和模式actuator_controls:PID输出actuator_outputs:电机PWMbattery_status:电池状态estimator_status:EKF状态vehicle_gps_position:GPS数据
这些是飞行分析的最小集合。需要更多数据时,通过SDLOG_PROFILE切换记录配置。
记录频率
默认约50Hz记录大多数topic。高优先级的topic(如sensor_combined)可以更高频率。如果开了高频率日志profile(SDLOG_PROFILE bit 3),IMU原始数据可以到kHz级别。
SD卡选择
SD卡写入速度直接影响日志质量。低速卡会导致Dropout,极端情况下Logger跟不上会丢数据。PX4官方建议用Class 10或U3卡。SanDisk Extreme系列实测比较稳定。
SD卡空间不足时,Logger会自动删除最旧的日志目录(阈值约50MiB),保证始终有空间记录新数据。
日志配置参数
SDLOG_MODE | ||
SDLOG_PROFILE | ||
SDLOG_BACKEND | ||
SDLOG_DIRS_MAX | ||
SDLOG_MISSION | ||
SDLOG_UTC_OFFSET |
SDLOG_MODE选项:
SDLOG_PROFILE是位掩码,按需开启:
调PID的时候建议开bit 3(高频率IMU),能看清角速率环的跟踪细节。调完记得关掉,否则日志文件会很大。
分析工具链
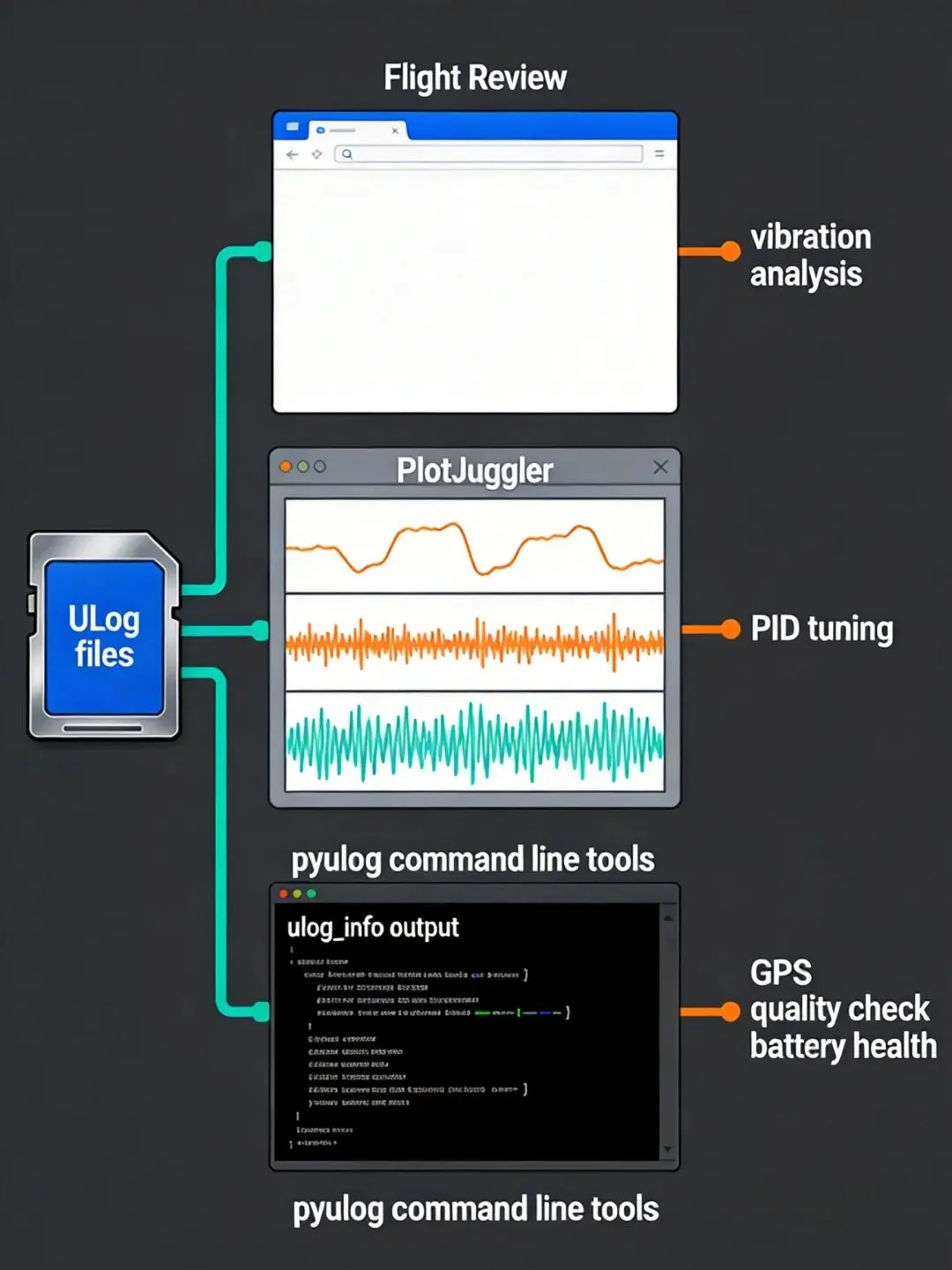
Flight Review:在线快速看
Flight Review(https://logs.px4.io)是PX4官方的在线日志分析工具。上传.ulg文件后自动生成报告,包括:
飞行轨迹2D/3D地图 姿态跟踪曲线 振动频谱图(加速度PSD) 电池电压/电流曲线 GPS精度指标 控制器跟踪性能
优点是零配置,拖拽上传就行。缺点是交互能力有限,不能自由选择topic和字段。快速排查用Flight Review,深度分析用PlotJuggler。
PlotJuggler:深度分析利器
PlotJuggler是PX4推荐的桌面分析工具,功能远超Flight Review:
基本操作:左侧topic列表搜索 → 拖拽字段到右侧图表。支持多面板分屏,时间轴同步。
四元数转欧拉角:搜vehicle_attitude → 展开q[4] → Tools菜单 → Quaternion to RPY → 自动生成roll/pitch/yaw曲线。
2D轨迹:Ctrl选中vehicle_local_position的x和y → 右键拖拽 → 生成2D散点图,直接看飞行轨迹。
多面板关联:水平/垂直分屏,同时显示姿态、速度、电池电流。移动时间游标,所有面板同步联动——这是排查问题的关键能力,单张图很难定位根因。
自定义函数:支持对数据做数学变换,比如速度取模、角速度求差,不需要导出CSV再到MATLAB算。
pyulog:命令行工具集
pyulog是Python解析库,附带一组命令行工具:
# 查看日志概要
ulog_info flight.ulg
# 提取所有参数
ulog_params flight.ulg > params.txt
# 查看printf日志
ulog_messages flight.ulg
# 转CSV
ulog2csv flight.ulg
# 转KML(Google Earth看轨迹)
ulog2kml flight.ulg
ulog_info输出里最值得关注的是Dropout统计和topic列表。Dropout多说明SD卡有问题,topic列表告诉你实际记录了哪些数据。
pyulog也可以当Python库用,写自定义分析脚本:
import pyulog
ulg = pyulog.ULog('flight.ulg')
attitude = ulg.get_dataset('vehicle_attitude')
timestamps = attitude.data['timestamp']
roll_rate = attitude.data['rollspeed'] # rad/s
pyFlightAnalysis:3D可视化
pyFlightAnalysis支持3D姿态可视化,可以回放飞行过程。适合分析特定时刻的飞机姿态变化,比如降落阶段的俯仰角变化。不过日常用PlotJuggler就够了。
常见排查套路
震动分析
震动是最常见的问题。高震动导致EKF发散、定高定点漂移。
排查步骤:
Flight Review看加速度PSD图——好的震动是低频区黄线,高频区蓝/绿;差的是大面积黄色 PlotJuggler打开 sensor_combined的accel_m_s2,缩放到悬停段——Z轴应该是一条细线,如果Z轴曲线碰到X/Y轴,震动过大开启SDLOG_PROFILE bit 3/5/6获取高频率IMU数据,用FFT看频谱峰值位置
经验值:悬停时加速度Z轴峰峰值超过2-3 m/s²就有问题,需要减震或调滤波器。如果频谱在50Hz附近有强峰值(起落架松动),80Hz低通滤波器挡不住。
GPS异常
GPS跳变会导致位置估计突变,飞机突然猛飞。
排查步骤:
看 vehicle_gps_position的hdop和satellites_used——hdop < 1.5好,> 2.0差;卫星数 < 12差estimator_status的pos_test_ratio——GPS数据一致性检验比率,> 1说明GPS数据被EKF拒了关联 vehicle_local_position的位置跳变时刻和GPS的hdop恶化时刻
电池健康
电池老化会导致内阻增大,大油门时电压骤降触发failsafe。
排查步骤:
battery_status的voltage_v和current_a——画在同一时间轴上看大油门时电压跌落幅度——新电池跌0.3-0.5V正常,跌1V以上内阻过大 battery_status的discharged_mah看实际消耗容量,跟标称容量对比
PID跟踪性能
调完PID必须看日志验证。
排查步骤:
vehicle_attitude的角速度(rollspeed/pitchspeed/yawspeed)vsactuator_controls的设定值PlotJuggler分屏同时看设定值和实际值,间距越小跟踪越好 开SDLOG_PROFILE bit 3获取高频率数据,看清角速率环的细节
断电/崩溃
日志在中途截断,飞机在空中突然没数据了。
排查步骤:
先看SD卡根目录有没有 fault_*.log文件——STM32的hard fault日志ulog_info看最后一条消息的时间戳,判断是否在飞行中截断如果没有fault文件且最后一条是正常数据,大概率是电源问题(电压瞬降导致复位) 看 battery_status最后几秒的电压曲线,是否有骤降
与ArduPilot DFLog对比
uLog最大的优势是自描述——不同版本的PX4可以生成不同的topic结构,解析器不需要升级就能读。DFLog是固定格式,新字段加了旧解析器可能不认识。
uLog的劣势是社区生态小一些。ArduPilot的DFLog有MAVExplorer这个成熟工具,脚本扩展性很强。uLog主要靠PlotJuggler和pyulog,生态在完善中。
踩坑记录
1. 日志没写上
最常见的原因是SDLOG_MODE=0(默认),只有解锁后才写。如果开机到解锁之间出了问题(比如传感器初始化失败),这段数据没记。排查启动问题设SDLOG_MODE=2(开机到关机)。
2. 高频日志把卡写满了
开了SDLOG_PROFILE bit 3(高频率IMU),一条5分钟的日志可能上百MB。32GB的SD卡也就存几十条。调完参记得关掉。
3. Dropout太多
ulog_info显示Dropout count很高。检查SD卡速度(换U3卡),减少记录的topic(用SDLOG_PROFILE只开需要的),或者降低记录频率。
4. PlotJuggler打不开.ulg
Windows上最新版PlotJuggler有时不兼容.ulg,回退到v2.8.4可以解决。Linux用AppImage没问题。
5. 时间戳对不上
uLog里的timestamp是系统启动后的微秒数(boot time),不是UTC时间。要对应实际时间,加上SDLOG_UTC_OFFSET和Header里的起始时间。
小结
uLog是PX4的飞行数据记录系统,自描述二进制格式,Logger模块在解锁时自动写SD卡。分析工具有三层:Flight Review快速看、PlotJuggler深度分析、pyulog命令行处理。常见排查套路就那几个:震动看加速度PSD、GPS看hdop和卫星数、电池看电压跌落、PID看角速率跟踪、断电看fault日志。
系列到这基本把PX4的核心模块都过了一遍:数据流全貌→EKF2融合→uORB通信→PID控制链路→Commander决策→Navigator路径规划→uLog事后分析。从传感器到电机,从起飞到落地,从实飞到复盘,整条链路串起来了。
本文代码为简化后的核心逻辑,方向正确但不是PX4真实代码。参数名和默认值已对照PX4官方文档校验。
