当前时间: 1970-01-01 08:00:00
分类:办公文件
评论(0)
今天我们重新定义了一款免费的机器人遥控软件下面博主参考Jack Huang的风格给大家介绍下这块机器人遥控软件(文中风格仅供娱乐,请大家重点关注软件)。朋友们,我是皮衣黄。今天,我要向你们展示一个将改变行业格局的一个遥控中台。这不是关于芯片,不是关于显卡——是关于如何让机器人爱好者拥有更便捷的操控,更低成本的参与。一、机器人控制的下一篇章:机器人控制一体化
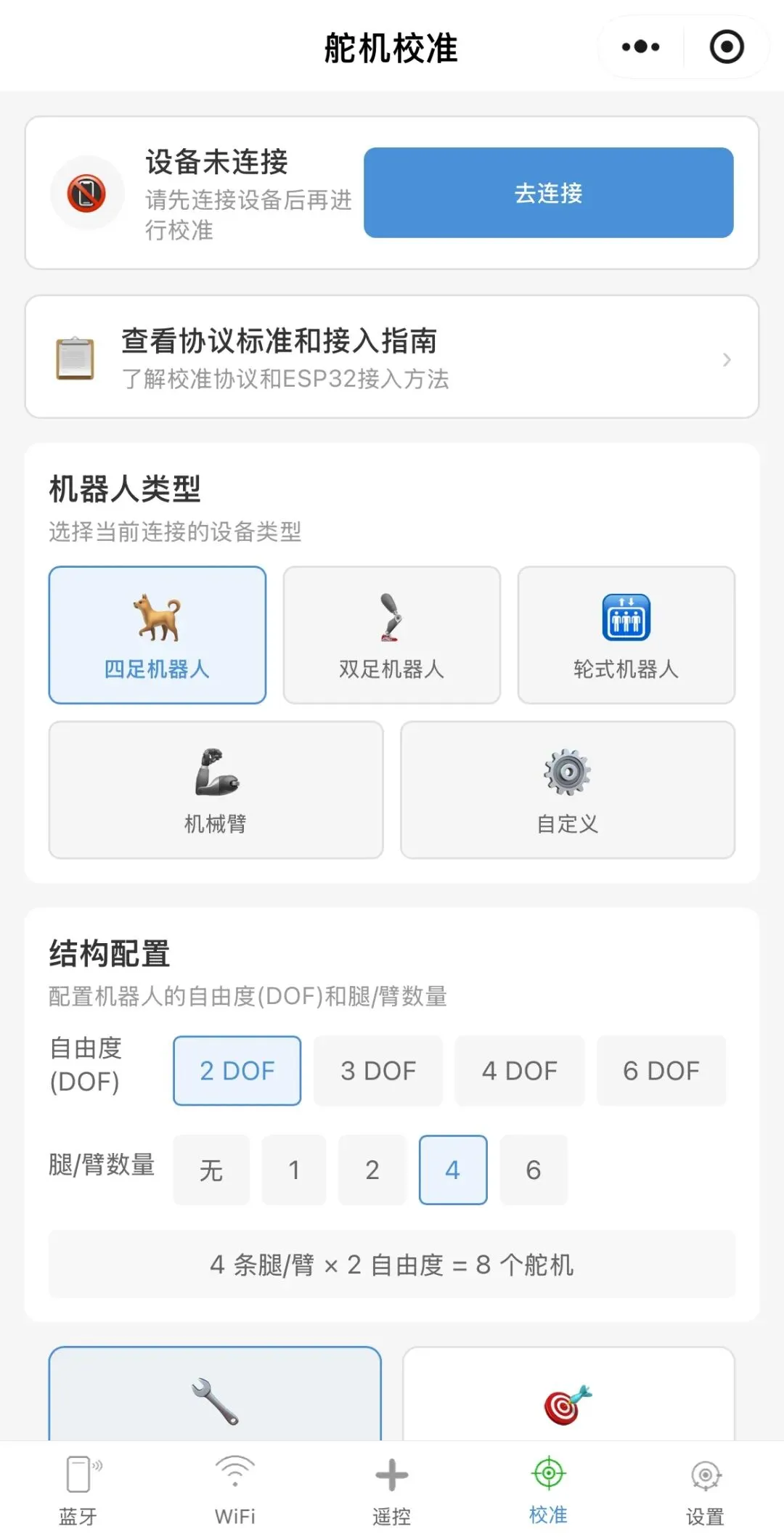
三十年前,我们每个人都能进行3D渲染。二十年前,AI训练已成为可能。今天,我们要做一件更疯狂的事:让机器人遥控像玩游戏一样简单。我们开发了一个小程序——目前支持:蓝牙BLE/WiFi WebSocket接入,一键急停,舵机中位校准,模拟摇杆操控,步态与姿态一键切换等,未来我们将加入图形化动作编排器,0基础引导测试,3D动作预览,自定义场景,AR融合操控,机器人固件库等。但别以为这是一个简单的工具。这是一个机器人遥控中台,一个跨硬件的互动平台,一个动作智能引擎。二、现在就能做到的事情:遥控一致性
2.1 统一机器人指令集(URC)——机器人的CUDA
就像CUDA让GPU编程标准化一样,URC让机器人指令标准化。无论你用的是ESP32、STM32、树莓派还是Jetson——同一套指令,全平台执行。我们做了什么?我们建立了一个硬件抽象层,把复杂的运动学计算、实时调度、通信协议全部封装。开发者不再需要关心底层硬件差异。写一次固件,后台匹配硬件运行——在机器人领域第一次成为现实。2.2 自动校准系统——机器人的“自学习”
每个机器人都是独特的。腿长不同、自由度不同、舵机/电机偏差不同。传统方法需要手动测量、手动调整——耗时较久。我们的解决方案?1分钟全自动校准。通过常用固件库匹配智能算法,新手用户跟着系统匹配、校准机械参数,建立精确的运动学正解,逆解模型。两个完全不同自由度的机器人,经过0位校准和微调后,执行同一动作的误差小于2%。2.3 实时同步引擎——毫秒级精度
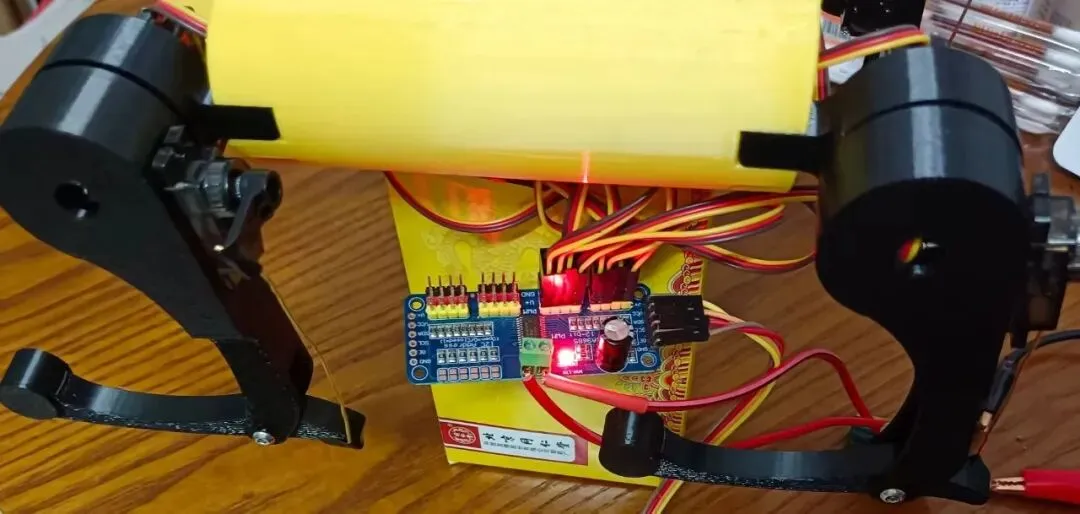
机器人控制最关键的挑战是什么?时序。哪怕12个舵机必须同步运动,误差必须在毫秒级。我们固件加入了时间同步协议,通过对不同的机器人做自适应调度,实现了跨硬件平台的毫秒级同步,即减少了舵机瞬时电流,又增强了多关节的稳定性。无论通过WiFi、蓝牙连接——动作一致性超过98%。三、技术架构:三个突破性创新
3.1 分层编译架构
应用层:图形化界面→ 中间层:URC指令集 → 硬件层:实时执行引擎每一层都经过极致优化。URC指令集支持实时编译,根据目标硬件特性自动选择最优指令格式。3.2 智能运动学引擎
内置四足、双足、机械臂、轮足等多种运动学模型。开发者不需要理解复杂的数学公式和代码,一键写入固件后——就可以开始属于你的机器人控制之旅。3.3 自适应通信协议
可根据网络条件自行调整:蓝牙环境下、WiFi环境可实现自动连接历史设备,断线重连、数据续传等智能化处理。四、如何应用:从实验室到生产线
4.1 教育领域:改变参与门槛
教培机构可以使用我们的平台,让学生在一周内完成从零到机器人舞蹈的创作。不用一行代码——只有直观的图形化编程。大幅度提升机器人教育普及率和交付率。4.2 创客领域:加速手搓效率
机器人爱好者可以用我们平台进行快速调试。传统编程需要1周实现,我们的平台——1小时搞定。这不是优化,是革命。4.3 研究领域:统一基准
我们的平台有行业标准的协议,大家不用去自创协议,只需要按标准协议去编程,就可以轻松实现机器人的遥控。五、即将到来的革命:未来六个月
5.1 图形化编程的终极形态(2026年Q3发布)
想象一下:在手机上拖拽彩色方块,组合成复杂动作序列。每个方块代表一个基础动作——行走、转身、跳跃、挥手。组合它们,创建无限可能。这不是简单的流程图,是可视化状态机,是图形化时间轴编辑,是实时动作预览。你拖拽的每一个操作,都会实时转换为URC指令,实时编译,实时3D预览,然后执行到机器人上实现。最重要的是:不需要机器人也可以3D模拟预览自己编排的动作,全程小程序操作实现!!!5.2 复杂动作序列生成(2026年Q4发布)
输入自然语言:“设计一个欢迎客人的动作序列”。AI会生成完整的动作流程:前进两步、鞠躬、挥手、后退。或者更简单:用手机拍摄你的动作——系统自动识别关键帧,转换为机器人动作。你的舞蹈,变成机器人的舞蹈。还有更好玩的:进入辅助设计,用手去操作机器人的动作,系统能录制这些动作,然后按照你定义的动作去执行,不限制动作数据和时长。5.3 云端动作库(2027年Q1发布)
开发者上传,用户一键下载、秒速同步至硬件。就像在手机上下载一首歌一样简单——搜索“科目三”、点击下载、自动写入固件。只需三秒,让你的机器人跳起舞来。为每个孩子打开机器人世界的第一扇门,我们从零设计,彻底降低机器人的组装、操控、开发、动作编排全链路门槛。让小学生也能亲手搭建、实时调试、自由创造——原来只有工程师能做到的事,现在孩子也能。六、加入创作:从今天开始
这个小程序现在就可以使用,完全免费,为什么免费?因为我们要建立标准,建立生态,建立未来。七、最后的话
三十年前,我创立NVIDIA时,梦想是让计算机能够生成逼真的图像。今天,我的新梦想是:让每个人都能创造有生命的机器。这不是关于让机器人更强大。这是关于让创造机器人的人更强大。
基本
文件
流程
错误
SQL
调试
- 请求信息 : 2026-06-09 12:52:17 HTTP/1.1 GET : https://www.yeyulingfeng.com/a/732206.html
- 运行时间 : 0.109499s [ 吞吐率:9.13req/s ] 内存消耗:4,747.14kb 文件加载:145
- 缓存信息 : 0 reads,0 writes
- 会话信息 : SESSION_ID=b15fe6b304e14dc9d6f5f82cc99edd61
- CONNECT:[ UseTime:0.000925s ] mysql:host=127.0.0.1;port=3306;dbname=wenku;charset=utf8mb4
- SHOW FULL COLUMNS FROM `fenlei` [ RunTime:0.001641s ]
- SELECT * FROM `fenlei` WHERE `fid` = 0 [ RunTime:0.000766s ]
- SELECT * FROM `fenlei` WHERE `fid` = 63 [ RunTime:0.000312s ]
- SHOW FULL COLUMNS FROM `set` [ RunTime:0.000657s ]
- SELECT * FROM `set` [ RunTime:0.000204s ]
- SHOW FULL COLUMNS FROM `article` [ RunTime:0.000610s ]
- SELECT * FROM `article` WHERE `id` = 732206 LIMIT 1 [ RunTime:0.001096s ]
- UPDATE `article` SET `lasttime` = 1780980737 WHERE `id` = 732206 [ RunTime:0.009532s ]
- SELECT * FROM `fenlei` WHERE `id` = 64 LIMIT 1 [ RunTime:0.000272s ]
- SELECT * FROM `article` WHERE `id` < 732206 ORDER BY `id` DESC LIMIT 1 [ RunTime:0.000482s ]
- SELECT * FROM `article` WHERE `id` > 732206 ORDER BY `id` ASC LIMIT 1 [ RunTime:0.000388s ]
- SELECT * FROM `article` WHERE `id` < 732206 ORDER BY `id` DESC LIMIT 10 [ RunTime:0.002120s ]
- SELECT * FROM `article` WHERE `id` < 732206 ORDER BY `id` DESC LIMIT 10,10 [ RunTime:0.000706s ]
- SELECT * FROM `article` WHERE `id` < 732206 ORDER BY `id` DESC LIMIT 20,10 [ RunTime:0.006280s ]

0.111212s

 夜雨聆风
夜雨聆风