 夜雨聆风
夜雨聆风 视觉项目评估
视觉项目评估 软件算法定制开发
软件算法定制开发 机器视觉技术培训指导
机器视觉技术培训指导
 geekdawn.blog.csdn.net
geekdawn.blog.csdn.net 很多人第一次接触模板匹配,都觉得只要调一个分数就行。
但实际用起来,你会发现:
有时候匹配不到目标 有时候同一个模板换张图就失效 有些参数不懂就容易错过正确结果
今天,我用最通俗的方式,讲清楚模板匹配的两种核心方法和关键参数,让你真正能把它用起来。
模板匹配是什么?
想象一下,你手里有一张小图片(模板),想在一张大图片里找到和它最像的位置。
模板匹配就是不断把模板“放到”大图的不同位置,算相似度,看哪里最像。
简单来说,它就是“照着样子找”。
两种核心匹配方式
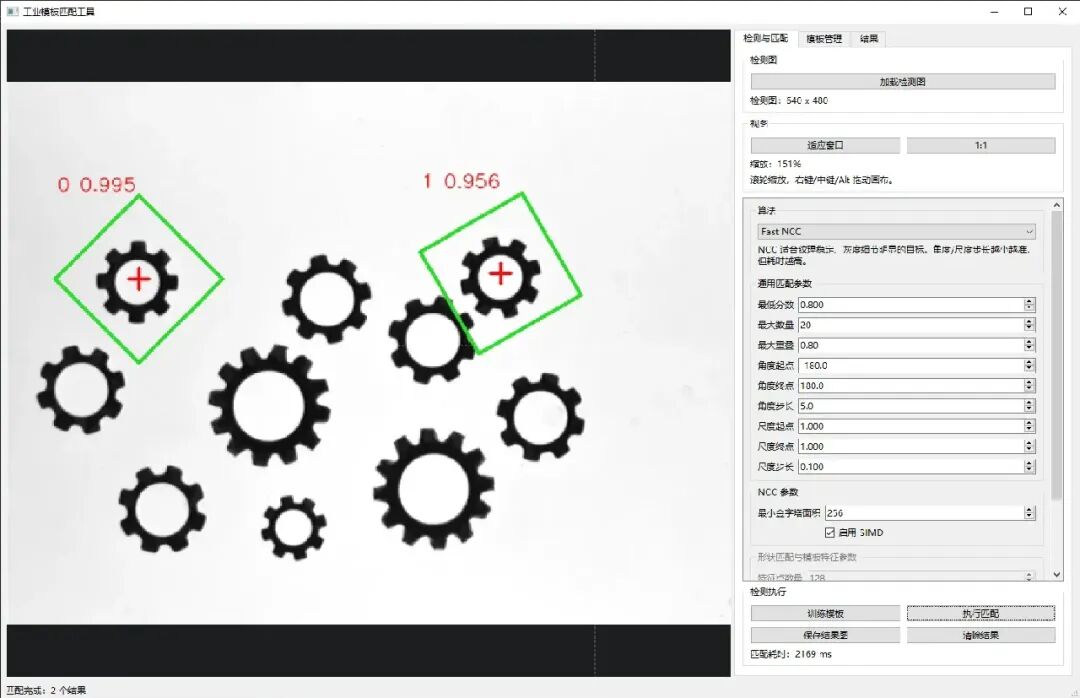
1. Fast NCC
Fast NCC 是基于灰度的匹配方法。
它看的是“亮暗变化的相似程度”,而不是单纯每个像素相等不等。 优势:对光照稍微变化不敏感。 适合:内部灰度细节明显的目标,例如字符、标签、纹理丰富的零件。
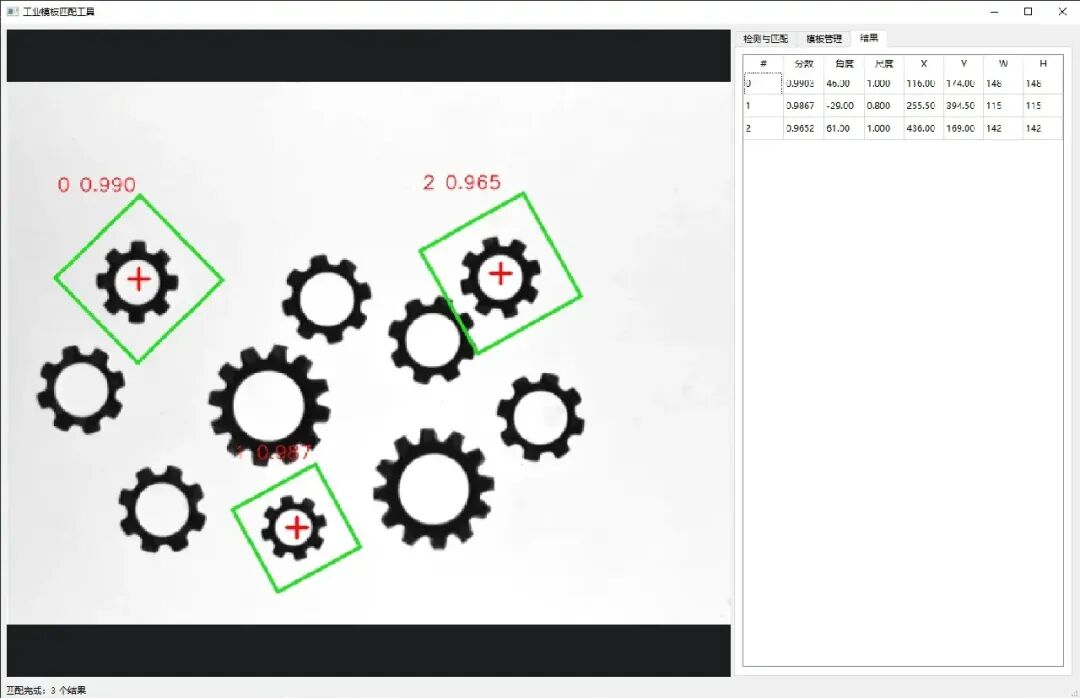
2. Shape Based(轮廓匹配)
Shape Based 更关注目标的形状和边缘。
不依赖内部灰度细节,只看轮廓。 优势:旋转和尺寸变化更稳定。 适合:轮廓清晰、纹理少的零件,例如齿轮、冲压件。
一句话总结:
有纹理用 NCC,轮廓明显用 Shape Based,不确定就都试。
关键参数怎么理解
模板匹配不仅仅是“调分数”,几个参数直接影响匹配效果:
1. 最低分数
控制匹配的严格程度。
分数越高 → 匹配要求越严格 → 容易漏掉略微不同的目标 分数越低 → 匹配松 → 可能误检
通俗理解:就像找相似度,分数是“相似到多少才算匹配”。 建议:先用低一点的分数跑一遍,看能不能找到目标,再慢慢收紧。
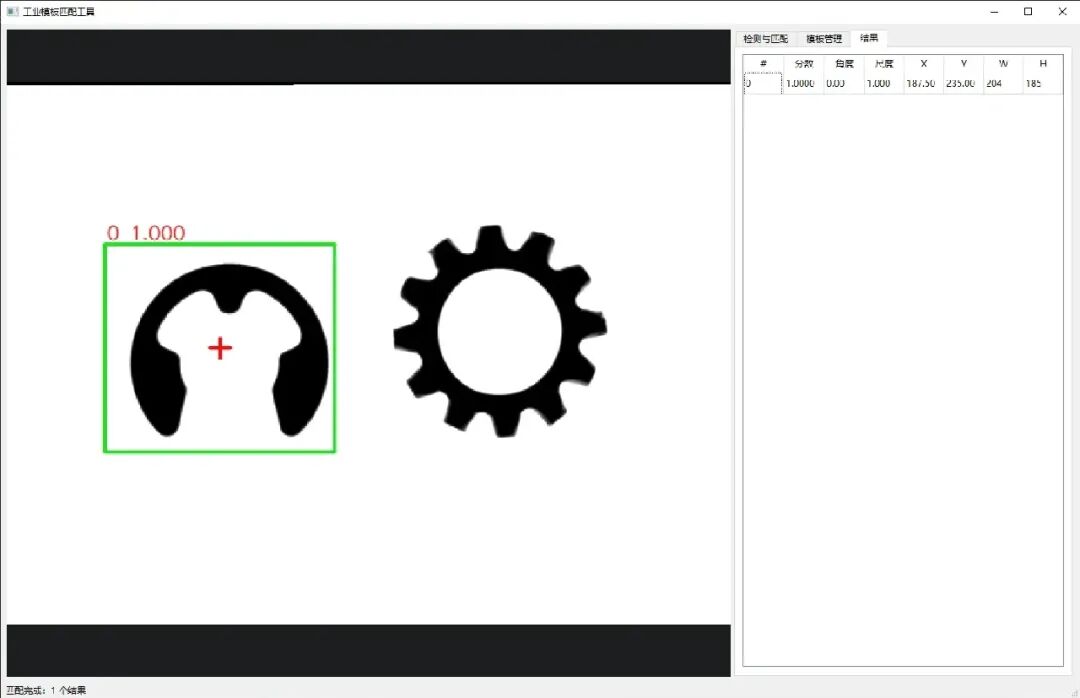
2. 最大匹配数量
一张图里可能有多个目标。
设 1 → 只取最像的 设 5 → 取前五个最像的
通俗理解:就是“最多要找几个匹配结果”。
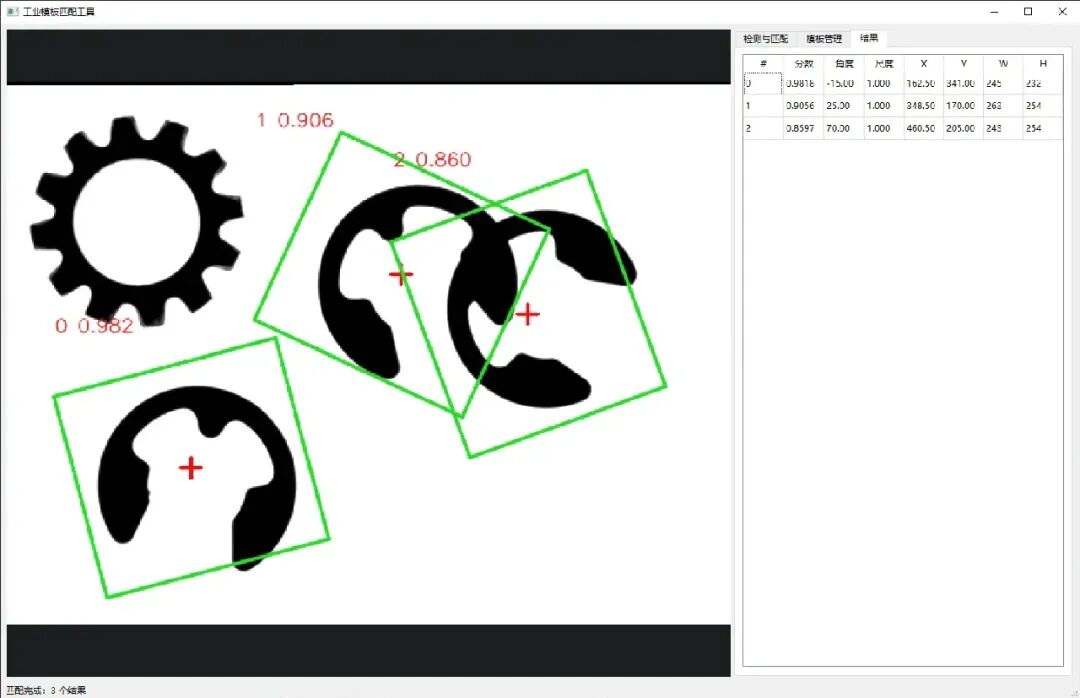
3. 角度范围与步长
如果目标会旋转,需要把模板旋转不同角度去找。
步长大 → 搜索快,但可能不精 步长小 → 搜索慢,但更精确
通俗理解:就像你转动一张图去找最像的位置。
4. 尺度范围与步长
目标大小可能不同。
比如模板比目标小,需要放大匹配 模板比目标大,需要缩小匹配
通俗理解:就像放大或缩小图片去找合适大小的匹配。
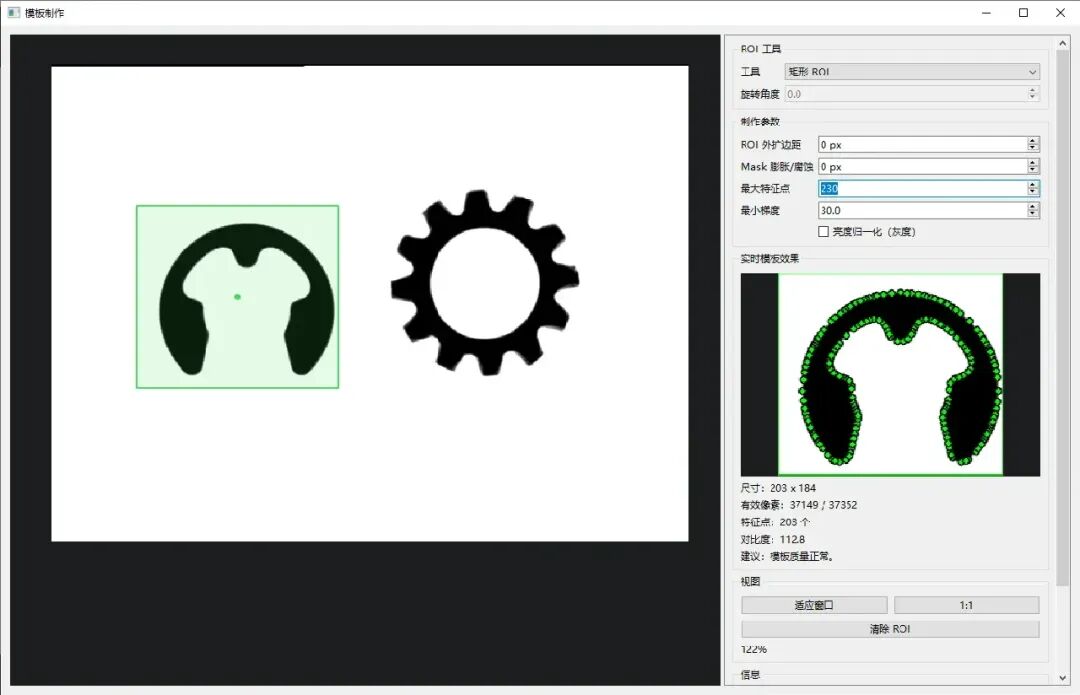
5. ROI 与模板质量(Shape Based 特有)
ROI:框选目标区域 外扩边距:框得太紧可能漏掉边缘,框太松会带入背景 特征点:模板用的关键轮廓点,点太少匹配不准,点太多可能带噪声
通俗理解:就是“模板越干净越好,边框和关键点选对了,匹配越稳”。
快速调参技巧
先保证模板本身质量好 固定角度和尺寸,先测试能否匹配 再打开角度搜索,找到旋转目标 最后打开尺度搜索,处理大小变化 调分数和最大数量,筛掉错误匹配
通俗理解:
先保证模板准确 → 逐步调整方向和大小 → 再决定筛选标准
总结
模板匹配看似简单,真正关键的是:
选择合适模型(NCC/Shape) 模板制作要干净 参数调得合理
掌握这些,你就可以让模板匹配既稳又准,而不是盲目调分数。
想体验我整理的离线模板匹配工具,或获取运行版和示例图片吗?关注公众号,评论+转发博主:模板匹配。
上述图片素材部分来源于互联网,若涉及版权问题,请在24小时内联系博主处理删除事宜。
专属机器视觉与软件开发从业者社群,只聊最落地的技术问题!
如果你从事 机器视觉推荐、上位机软件开发 等相关领域,欢迎加入我们的社群!扫码添加小助手,备注来意(如:获取源码、视觉项目评估、软件算法定制开发、视觉技术培训指导 等)即可申请入群。


公众号互助
