 夜雨聆风
夜雨聆风各位无人机开发爱好者们大家好,很多开发者反馈想做PX4代码开发时,下载下来的代码架构看不懂,各个文件夹不知道执行什么功能,不知如何下手。其实刚开始接触PX4代码的人都有这个问题,想进行PX4飞控开发确实需要静下心来好好对代码框架、信息流转、飞控逻辑等进行理解。本文将带领大家一起,从PX4飞控的代码文件框架、信息流、控制逻辑等方面进行介绍,帮助大家快速了解源码,逐环节拆解PX4的运行机制,完整追踪从系统上电到电机转动的每一个步骤。
本公众号以往热门文章~
机器人顶刊TRO力作——基于强化学习(RL)与模型预测控制(MPC)结合的无人机控制
一、PX4源码目录结构:逐文件夹深度解析
首先我们重新克隆完整的源码树:
git clone https://github.com/PX4/PX4-Autopilot.git --recursivecd PX4-Autopilot |
1.1根目录核心文件夹全解
目录 | 核心功能 | 必看文件/子目录 |
.github/ | GitHub CI/CD配置 | workflows/ |
boards/ | 所有硬件板的板级支持包 | px4/fmu-v5/, px4/sitl/ |
cmake/ | CMake构建系统配置 | common/px4_base.cmake |
docs/ | 官方文档源码 | en/ |
integrationtests/ | 集成测试代码 | python/ |
launch/ | ROS2启动文件 | sitl.launch.py |
msg/ | uORB消息定义 | 所有.msg文件 |
platforms/ | 操作系统平台适配 | nuttx/, posix/ |
ROMFS/ | 只读文件系统镜像 | px4fmu_common/init.d/ |
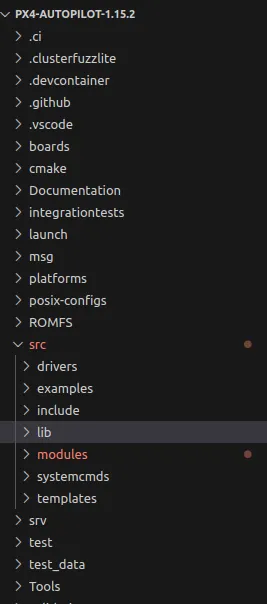
src/ | 所有核心源代码 | modules/, lib/, drivers/ |
test/ | 单元测试代码 | unit_tests/ |
Tools/ | 开发工具链 | simulation/, setup/ |
1.2核心中的核心:src/目录逐个子目录详解
这是整个PX4源码的心脏,我们将逐个解析每个子目录的功能和重要性:
src/├── drivers/ # 硬件驱动层(30%代码量)│ ├── imu/ # IMU传感器驱动(BMI088, ICM20602等)│ ├── barometer/ # 气压计驱动(MS5611, BMP388等)│ ├── magnetometer/ # 磁力计驱动(HMC5983, QMC5883等)│ ├── gps/ # GPS驱动(u-blox M8/M9, NMEA等)│ ├── led/ # LED指示灯驱动│ ├── pwm_out/ # PWM输出驱动(电机控制)│ ├── rc/ # 遥控器接收机驱动(SBUS, DSM等)│ └── camera/ # 相机和云台驱动├── lib/ # 通用算法和工具库(25%代码量)│ ├── controllib/ # 控制算法库(PID, LQR等)│ ├── l1/ # 估计与控制库(EKF核心)│ ├── mixer/ # 混控算法库│ ├── mathlib/ # 数学运算库(矩阵, 四元数等)│ ├── parameters/ # 参数系统实现│ ├── systemlib/ # 系统工具函数│ └── uORB/ # uORB消息总线实现├── modules/ # 核心功能模块(40%代码量)│ ├── commander/ # 飞行指挥官(状态机, 飞行模式)│ ├── ekf2/ # 扩展卡尔曼滤波状态估计│ ├── mc_att_control/ # 多旋翼姿态控制器│ ├── mc_pos_control/ # 多旋翼位置控制器│ ├── mc_rate_control/ # 多旋翼角速度控制器(关键!)│ ├── sensors/ # 传感器数据融合与校准│ ├── mavlink/ # MAVLink通信协议实现│ ├── logger/ # 日志记录系统(ulog)│ ├── navigator/ # 任务导航与航点规划│ ├── land_detector/ # 着陆检测器│ ├── battery/ # 电池状态监测│ └── px4iofirmware/ # IO协处理器固件├── platforms/ # 平台抽象层│ ├── common/ # 通用平台接口│ ├── nuttx/ # NuttX实时操作系统适配│ └── posix/ # Linux/macOS系统适配└── systemcmds/ # 系统命令行工具├── px4/ # PX4主程序入口├── param/ # 参数管理命令├── top/ # 系统资源监控命令└── listener/ # uORB消息监听命令
特别强调三个容易被忽略但极其重要的目录:
src/lib/l1/:这是PX4的"算法大脑",包含了EKF、L1导航、纯追踪等所有核心算法的基础实现
src/modules/mc_rate_control/:这是整个多旋翼控制的最内环,直接决定了飞行的响应速度和稳定性
ROMFS/px4fmu_common/init.d/:所有启动脚本都在这里,决定了系统启动时加载哪些驱动和模块
二、PX4系统完整启动流程:从上电到就绪
这是PX4运行机制的关键。我们将从系统上电开始,一步一步追踪到无人机准备起飞的整个过程。
2.1启动流程总览
上电 → Bootloader → NuttX内核启动 → PX4主程序 → rcS脚本 → 驱动加载 → 核心模块启动 → 功能模块启动 → 系统就绪2.2第一步:Bootloader阶段
代码位置:bootloader/目录(独立于主源码树)
程序的入口位于platforms\nuttx\NuttX\nuttx\arch\arm\src\stm32h7\stm32_start.c中的void __start(void)函数。
系统上电后,首先运行Bootloader
初始化基本硬件(时钟、串口、Flash)
检查是否有固件更新请求
如果没有更新请求,跳转到主固件地址
开始执行NuttX内核
void __start(void){const uint32_t *src;uint32_t *dest;// 栈检查初始化,目的:设置栈边界检查,防止栈溢出#ifdef CONFIG_ARMV7M_STACKCHECK/* Set the stack limit before we attempt to call any functions */__asm__ volatile("sub r10, sp, %0" : :"r"(CONFIG_IDLETHREAD_STACKSIZE - 64) :);#endif/* If enabled reset the MPU */mpu_early_reset(); // 内存保护单元(MPU)重置,在早期阶段重置MPU,确保内存访问权限的正确设置/* Clear .bss. We'll do this inline (vs. calling memset) just to be* certain that there are no issues with the state of global variables.*/// BSS段清零,关键作用:初始化未初始化的全局变量为0for (dest = &_sbss; dest < &_ebss; ){*dest++ = 0;}/* Move the initialized data section from his temporary holding spot in* FLASH into the correct place in SRAM. The correct place in SRAM is* give by _sdata and _edata. The temporary location is in FLASH at the* end of all of the other read-only data (.text, .rodata) at _eronly.*/// 数据段初始化,核心功能:将初始化的全局变量从Flash复制到RAMfor (src = &_eronly, dest = &_sdata; dest < &_edata; ){*dest++ = *src++;}/* Copy any necessary code sections from FLASH to RAM. The correct* destination in SRAM is geive by _sramfuncs and _eramfuncs. The* temporary location is in flash after the data initialization code* at _framfuncs. This should be done before stm32_clockconfig() is* called (in case it has some dependency on initialized C variables).*/#ifdef CONFIG_ARCH_RAMFUNCSfor (src = &_framfuncs, dest = &_sramfuncs; dest < &_eramfuncs; ){*dest++ = *src++;}#endif// 基础硬件初始化stm32_clockconfig(); // 配置系统时钟arm_fpuconfig(); // 配置浮点运算单元stm32_lowsetup(); // 底层硬件设置showprogress('A');/* Enable/disable tightly coupled memories */stm32_tcmenable(); // 紧密耦合内存使能/* Initialize onboard resources */stm32_boardinitialize(); // 板级外设初始化showprogress('B');/* Enable I- and D-Caches */up_enable_icache(); // 指令缓存使能up_enable_dcache(); // 数据缓存使能showprogress('C');/* Perform early serial initialization */#ifdef USE_EARLYSERIALINITarm_earlyserialinit(); // 早期串口初始化,尽早启用串口输出,便于调试信息输出#endifshowprogress('D');/* For the case of the separate user-/kernel-space build, perform whatever* platform specific initialization of the user memory is required.* Normally this just means initializing the user space .data and .bss* segments.*/#ifdef CONFIG_BUILD_PROTECTEDstm32_userspace(); // 用户空间初始化,如果启用保护模式,设置用户空间内存布局#endifshowprogress('E');/* Then start NuttX */showprogress('\r');showprogress('\n');nx_start();/* Shouldn't get here */for (; ; );}调用流程
nx_start()是启动nxttx的核心函数,调用nx_bringup()函数,nx_create_init_thread——nx_start_application——nx_task_create——nsh_main——nsh_console_main——nsh_initscript——rcS
2.3第二步:NuttX内核启动
代码位置:platforms/nuttx/NuttX/
NuttX内核解压缩并初始化
配置内存管理单元(MMU)
初始化中断控制器和系统定时器
创建内核线程和调度器
挂载根文件系统(ROMFS)
启动用户空间第一个进程:init
系统启动后将加载
ROMFS\px4fmu_common\init.d\rcS
2.4第四步:rcS启动脚本执行
代码位置:ROMFS/px4fmu_common/init.d/rcS
这是整个启动流程的核心,所有驱动和模块都是通过这个脚本启动的。我们来逐行解析这个脚本:
#!/bin/sh# PX4启动脚本 - rcS# 1. 设置环境变量export PATH=/bin:/sbin:/usr/bin:/usr/sbinexport PX4_ROOTFSDIR=/# 2. 挂载文件系统mount -t proc none /procmount -t sysfs none /sys# 3. 启动系统日志服务syslogd start# 4. 加载板级特定配置if [ -f /etc/init.d/rc.board ]; thensource /etc/init.d/rc.boardfi# 5. 启动uORB消息总线uorb start# 6. 启动参数服务器param start# 7. 加载默认参数param load /etc/defaults/parameters# 8. 启动硬件驱动echo "Starting hardware drivers..."led start # 启动LED驱动pwm_out start # 启动PWM输出驱动imu start # 启动IMU驱动baro start # 启动气压计驱动mag start # 启动磁力计驱动gps start # 启动GPS驱动rc start # 启动遥控器驱动# 9. 启动核心模块echo "Starting core modules..."sensors start # 启动传感器数据处理模块ekf2 start # 启动EKF2状态估计模块commander start # 启动飞行指挥官logger start # 启动日志记录模块# 10. 启动功能模块echo "Starting functional modules..."mc_rate_control start # 启动角速度控制器mc_att_control start # 启动姿态控制器mc_pos_control start # 启动位置控制器navigator start # 启动导航模块mavlink start # 启动MAVLink通信模块
重要提示:不同的飞控板有不同的启动脚本,位于ROMFS/px4fmu_common/init.d/rcS.d/目录下,以数字开头,按顺序执行。
2.5第五步:模块初始化与主循环启动
每个模块被脚本启动后,都会执行自己的初始化流程,然后进入主循环。我们以mc_att_control模块为例,看看一个典型模块的完整生命周期:
代码位置:src/modules/mc_att_control/mc_att_control_main.cpp
// 模块入口函数extern "C" intmc_att_control_main(int argc, char *argv[]){// 1. 解析命令行参数if (argc > 1) {if (!strcmp(argv[1], "start")) {return McAttControl::start();} else if (!strcmp(argv[1], "stop")) {return McAttControl::stop();} else if (!strcmp(argv[1], "status")) {return McAttControl::status();}}// 显示帮助信息printf("Usage: mc_att_control {start|stop|status}\n");return 1;}// 模块启动函数intMcAttControl::start(){// 检查模块是否已经在运行if (_instance != nullptr) {printf("mc_att_control already running\n");return -1;}// 创建模块实例_instance = new McAttControl();// 启动模块线程pthread_attr_t attr;pthread_attr_init(&attr);pthread_attr_setstacksize(&attr, 4096);pthread_attr_setschedpolicy(&attr, SCHED_FIFO);pthread_attr_setschedparam(&attr, &(struct sched_param){.sched_priority = SCHED_PRIORITY_ATTITUDE_CONTROL});pthread_t thread;int ret = pthread_create(&thread, &attr, &McAttControl::task_main_trampoline, _instance);if (ret != 0) {delete _instance;_instance = nullptr;printf("Failed to create mc_att_control thread: %d\n", ret);return -1;}pthread_detach(thread);return 0;}// 模块主循环void *McAttControl::task_main_trampoline(void *arg){McAttControl *instance = static_cast<McAttControl *>(arg);instance->run();delete instance;_instance = nullptr;return nullptr;}voidMcAttControl::run(){// 初始化订阅者_att_sub = orb_subscribe(ORB_ID(vehicle_attitude));_att_sp_sub = orb_subscribe(ORB_ID(vehicle_attitude_setpoint));// 初始化发布者_rate_sp_pub = orb_advertise(ORB_ID(vehicle_rates_setpoint), &_rate_sp);// 主循环while (!should_exit()) {// 等待新的姿态数据(最多等待20ms,对应50Hz频率)px4_pollfd_struct_t fds[] = {{.fd = _att_sub, .events = POLLIN}};int poll_ret = px4_poll(fds, 1, 20);if (poll_ret > 0 && (fds[0].revents & POLLIN)) {// 复制姿态数据vehicle_attitude_s att;orb_copy(ORB_ID(vehicle_attitude), _att_sub, &att);// 复制姿态目标数据vehicle_attitude_setpoint_s att_sp;orb_copy(ORB_ID(vehicle_attitude_setpoint), _att_sp_sub, &att_sp);// 运行姿态控制算法control_attitude(att, att_sp);// 发布角速度目标orb_publish(ORB_ID(vehicle_rates_setpoint), _rate_sp_pub, &_rate_sp);}}// 清理资源orb_unsubscribe(_att_sub);orb_unsubscribe(_att_sp_sub);orb_unadvertise(_rate_sp_pub);}
2.7第六步:系统就绪
当所有模块都成功启动并进入主循环后,系统就进入了就绪状态。此时:
LED指示灯会变成绿色(表示系统正常)
地面站QGroundControl会显示"Ready to fly"
无人机可以接收遥控器指令并执行飞行任务
三、PX4控制闭环从传感器到电机的分析
现在我们已经知道了系统如何启动,接下来我们将深入分析多旋翼定点飞行时的完整控制闭环,包括每个模块的运行频率、数据同步机制和精确的时间延迟。
3.1控制闭环的三层结构
PX4采用了经典的三环控制结构,从外到内依次是:
位置环:控制无人机的位置
姿态环:控制无人机的姿态角
角速度环:控制无人机的角速度(最内环)
为什么要采用三环结构?
内环响应速度快,能够快速抑制干扰
外环响应速度慢,负责精确跟踪目标
分层设计便于调试和参数整定
3.2完整控制闭环的时序图
时间(ms) | 模块 | 输入消息 | 输出消息 | 频率---------|--------------------|------------------------|------------------------|------0 | IMU驱动 | 原始传感器数据 | sensor_imu | 1000Hz1 | 传感器模块 | sensor_imu | vehicle_imu | 1000Hz2 | EKF2模块 | vehicle_imu | vehicle_attitude | 250Hz| | vehicle_gps_position | vehicle_local_position | 250Hz3 | 位置控制器 | vehicle_local_position | vehicle_attitude_sp | 50Hz| | position_setpoint | |4 | 姿态控制器 | vehicle_attitude | vehicle_rates_sp | 250Hz| | vehicle_attitude_sp | |5 | 角速度控制器 | vehicle_attitude | actuator_controls | 1000Hz| | vehicle_rates_sp | |6 | 混控器 | actuator_controls | actuator_outputs | 1000Hz7 | PWM驱动 | actuator_outputs | 电机PWM信号 | 1000Hz8 | 电机 | PWM信号 | 升力和力矩 | -
总延迟:从传感器采集数据到电机输出,总延迟约为8ms,这是保证多旋翼飞行稳定性的关键指标。
3.3各控制环的详细实现
3.3.1最内环:角速度控制
代码位置:src/modules/mc_rate_control/mc_rate_control_main.cpp
这是整个控制闭环中最重要、最关键的一环,直接决定了无人机的飞行品质。
voidMcRateControl::run(){// 订阅消息_att_sub = orb_subscribe(ORB_ID(vehicle_attitude));_rates_sp_sub = orb_subscribe(ORB_ID(vehicle_rates_setpoint));// 初始化PID控制器_roll_pid.init(PARAM_RATE_ROLL_P, PARAM_RATE_ROLL_I, PARAM_RATE_ROLL_D,PARAM_RATE_ROLL_IMAX, PARAM_RATE_ROLL_D_LPF);_pitch_pid.init(PARAM_RATE_PITCH_P, PARAM_RATE_PITCH_I, PARAM_RATE_PITCH_D,PARAM_RATE_PITCH_IMAX, PARAM_RATE_PITCH_D_LPF);_yaw_pid.init(PARAM_RATE_YAW_P, PARAM_RATE_YAW_I, PARAM_RATE_YAW_D,PARAM_RATE_YAW_IMAX, PARAM_RATE_YAW_D_LPF);while (!should_exit()) {// 等待IMU数据(1kHz频率)px4_pollfd_struct_t fds[] = {{.fd = _att_sub, .events = POLLIN}};int poll_ret = px4_poll(fds, 1, 1);if (poll_ret > 0 && (fds[0].revents & POLLIN)) {vehicle_attitude_s att;orb_copy(ORB_ID(vehicle_attitude), _att_sub, &att);vehicle_rates_setpoint_s rates_sp;orb_copy(ORB_ID(vehicle_rates_setpoint), _rates_sp_sub, &rates_sp);// 计算角速度误差float roll_error = rates_sp.roll - att.rollspeed;float pitch_error = rates_sp.pitch - att.pitchspeed;float yaw_error = rates_sp.yaw - att.yawspeed;// 运行PID控制float roll_output = _roll_pid.update(roll_error, att.timestamp);float pitch_output = _pitch_pid.update(pitch_error, att.timestamp);float yaw_output = _yaw_pid.update(yaw_error, att.timestamp);// 构造控制输出actuator_controls_s controls{};controls.control[0] = roll_output;controls.control[1] = pitch_output;controls.control[2] = yaw_output;controls.control[3] = rates_sp.thrust;controls.timestamp = hrt_absolute_time();// 发布控制量orb_publish(ORB_ID(actuator_controls), _controls_pub, &controls);}}}
3.3.2中间环:姿态控制
代码位置:src/modules/mc_att_control/mc_att_control_main.cpp
姿态控制的目标是将无人机的姿态角调整到期望值,输出是期望的角速度。
voidMcAttControl::control_attitude(const vehicle_attitude_s &att,const vehicle_attitude_setpoint_s &att_sp){// 计算四元数误差Quatf q_att(att.q);Quatf q_sp(att_sp.q);Quatf q_err = q_sp.inversed() * q_att;// 将四元数误差转换为欧拉角误差Eulerf euler_err(q_err);// 计算期望角速度_rate_sp.roll = euler_err.phi() * PARAM_ATT_ROLL_P;_rate_sp.pitch = euler_err.theta() * PARAM_ATT_PITCH_P;_rate_sp.yaw = euler_err.psi() * PARAM_ATT_YAW_P;// 限制角速度最大值_rate_sp.roll = math::constrain(_rate_sp.roll, -PARAM_RATE_ROLL_MAX, PARAM_RATE_ROLL_MAX);_rate_sp.pitch = math::constrain(_rate_sp.pitch, -PARAM_RATE_PITCH_MAX, PARAM_RATE_PITCH_MAX);_rate_sp.yaw = math::constrain(_rate_sp.yaw, -PARAM_RATE_YAW_MAX, PARAM_RATE_YAW_MAX);// 传递油门_rate_sp.thrust = att_sp.thrust;_rate_sp.timestamp = hrt_absolute_time();}
3.3.3外环:位置控制
代码位置:src/modules/mc_pos_control/mc_pos_control_main.cpp
位置控制的目标是将无人机的位置调整到期望值,输出是期望的姿态角和油门。
void McPosControl::control_position(const vehicle_local_position_s &pos,const position_setpoint_s &pos_sp){// 计算位置误差float x_err = pos_sp.x - pos.x;float y_err = pos_sp.y - pos.y;float z_err = pos_sp.z - pos.z;// 计算期望速度float vx_sp = x_err * PARAM_POS_XY_P;float vy_sp = y_err * PARAM_POS_XY_P;float vz_sp = z_err * PARAM_POS_Z_P;// 限制最大速度vx_sp = math::constrain(vx_sp, -PARAM_VEL_XY_MAX, PARAM_VEL_XY_MAX);vy_sp = math::constrain(vy_sp, -PARAM_VEL_XY_MAX, PARAM_VEL_XY_MAX);vz_sp = math::constrain(vz_sp, -PARAM_VEL_Z_MAX_UP, PARAM_VEL_Z_MAX_DOWN);// 计算速度误差float vx_err = vx_sp - pos.vx;float vy_err = vy_sp - pos.vy;float vz_err = vz_sp - pos.vz;// 运行速度PID控制float x_output = _vel_x_pid.update(vx_err, pos.timestamp);float y_output = _vel_y_pid.update(vy_err, pos.timestamp);float z_output = _vel_z_pid.update(vz_err, pos.timestamp);// 转换为期望姿态角_att_sp.roll = y_output * PARAM_VEL_XY_P;_att_sp.pitch = -x_output * PARAM_VEL_XY_P;_att_sp.thrust = 0.5f + z_output;// 限制姿态角和油门_att_sp.roll = math::constrain(_att_sp.roll, -PARAM_ATT_ROLL_MAX, PARAM_ATT_ROLL_MAX);_att_sp.pitch = math::constrain(_att_sp.pitch, -PARAM_ATT_PITCH_MAX, PARAM_ATT_PITCH_MAX);_att_sp.thrust = math::constrain(_att_sp.thrust, 0.0f, 1.0f);_att_sp.timestamp = hrt_absolute_time();}
3.4数据同步机制
在多模块并发运行的系统中,数据同步是一个非常重要的问题。PX4通过以下几种机制保证数据的一致性:
时间戳机制:所有uORB消息都包含一个timestamp字段,表示数据产生的时间。模块在处理数据时会检查时间戳,确保使用的是最新的数据。
px4_poll机制:模块通过px4_poll等待消息,而不是主动轮询。这样可以保证模块在有新数据时立即执行,提高系统的实时性。
消息队列机制:uORB消息总线内部维护了一个消息队列,确保不会丢失任何重要数据。
优先级调度:高优先级的任务(如IMU驱动、角速度控制)会优先执行,保证关键数据的及时处理。
四、PX4核心组件深度解析
4.1参数系统
代码位置:src/lib/parameters/
参数系统是PX4的"配置中心",所有可配置的参数都通过参数系统管理。参数系统的特点:
参数存储在Flash中,掉电不丢失
参数可以通过地面站实时修改
参数有默认值和范围限制
参数支持分类和搜索
参数定义示例:
// 参数定义PARAM_DEFINE_FLOAT(RATE_ROLL_P, 0.15f);PARAM_DEFINE_FLOAT(RATE_ROLL_I, 0.1f);PARAM_DEFINE_FLOAT(RATE_ROLL_D, 0.003f);// 参数使用float roll_p = param_get_float(PARAM_RATE_ROLL_P);
4.2日志系统
代码位置:src/modules/logger/
日志系统是PX4的"黑匣子",记录了飞行过程中的所有数据。PX4使用自定义的ulog格式,具有以下特点:
高压缩比,占用存储空间小
支持多种数据类型
可以记录任意uORB消息
支持实时日志上传
日志分析工具:
Flight Review:https://review.px4.io
PlotJuggler:https://plotjuggler.io
4.3指挥官状态机
代码位置:src/modules/commander/
指挥官是PX4的"大脑中枢",负责管理无人机的所有飞行状态和飞行模式。指挥官内部实现了一个复杂的状态机,包括以下主要状态:
MANUAL:手动模式
ALTCTL:高度控制模式
POSCTL:位置控制模式
AUTO_MISSION:自动任务模式
LOITER:自动悬停模式
RTL:自动返航模式
LAND:自动着陆模式
OFFBOARD:离线控制模式
上面给大家拆解了PX4飞控源码的运行机制,从系统上电到控制闭环的每一个环节都进行了粗略的分析。大家可以按照这个思路慢慢的继续学习源码,记住:源码阅读是一个循序渐进的过程。不要期望一口气看完所有代码,而是从一个简单的模块开始,逐步深入。当你理解了一个模块后,再去看其他模块,你会发现很多相似的设计思想和实现方式。
后续我们会继续分享 PX4 自定义模块开发、ROS2 与 PX4 通信、自主避障算法开发、多机集群控制等进阶内容,欢迎关注我的公众号,第一时间获取最新的无人机开发干货。
同时我们有无人机开发爱好者群聊,汇聚开发者们共同交流技术心得,欢迎加入~


