



文档内容
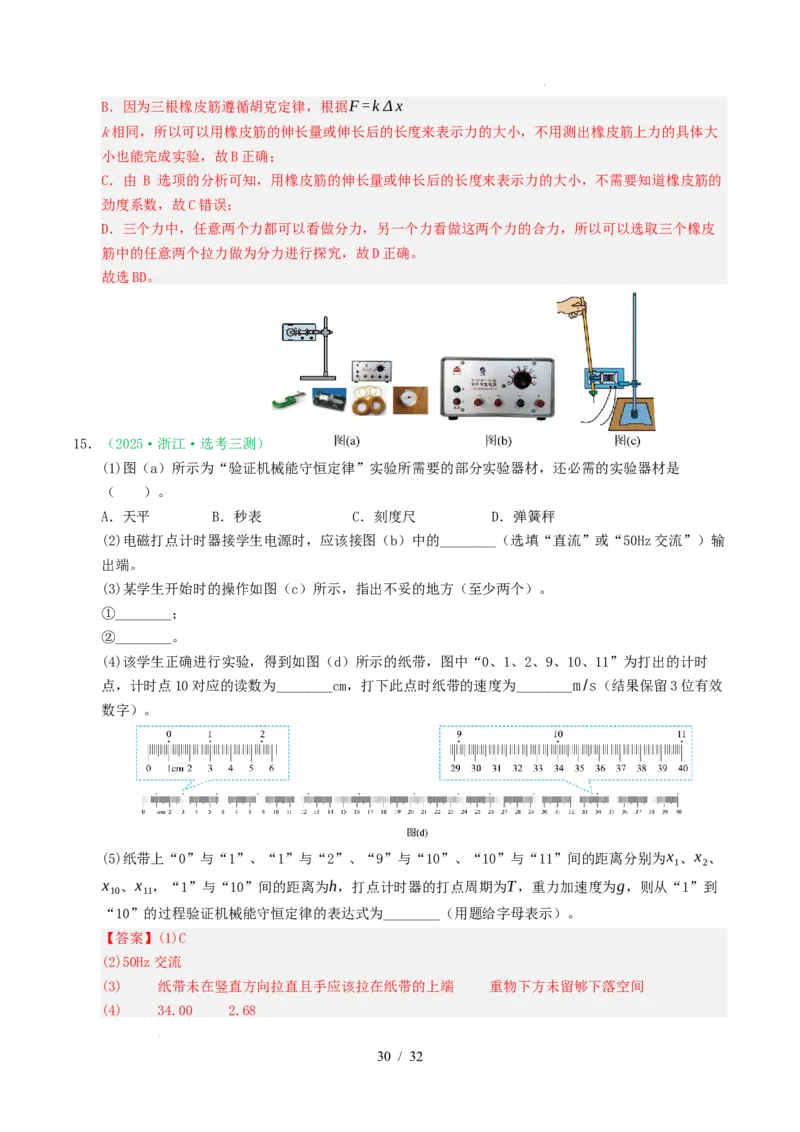
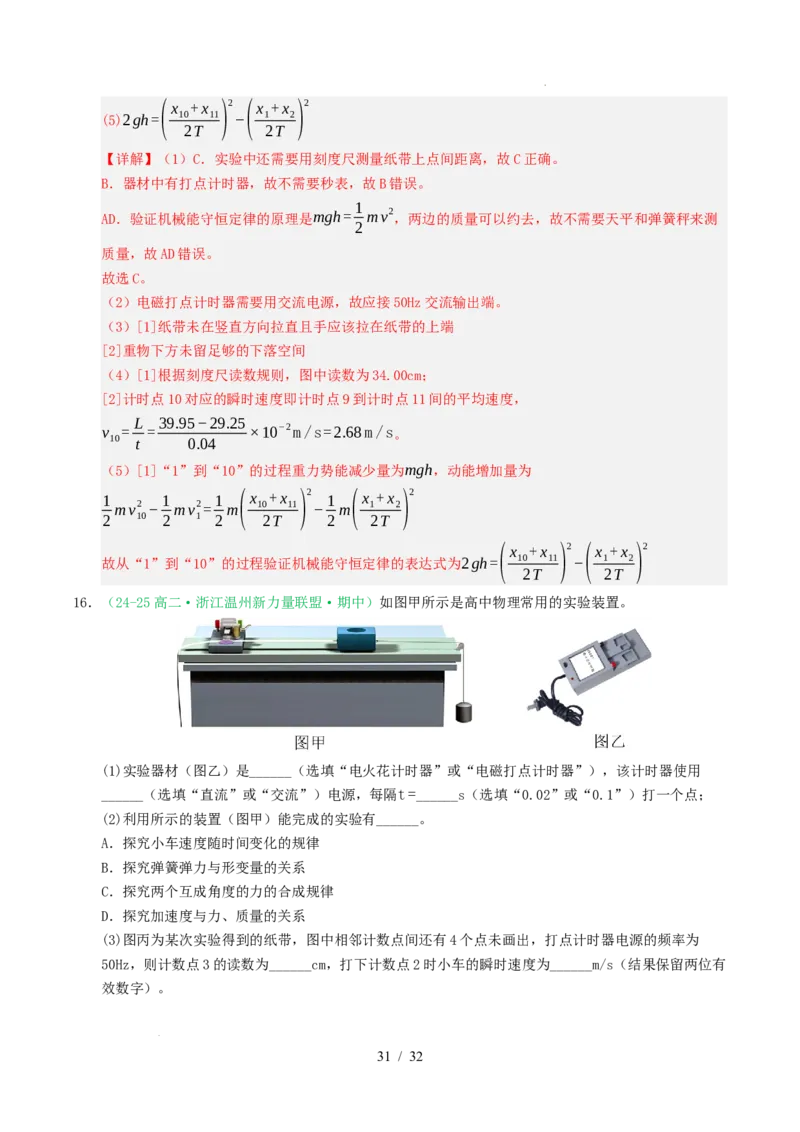
专题 17 力学实验
考点 五年考情(2021-2025) 命题趋势
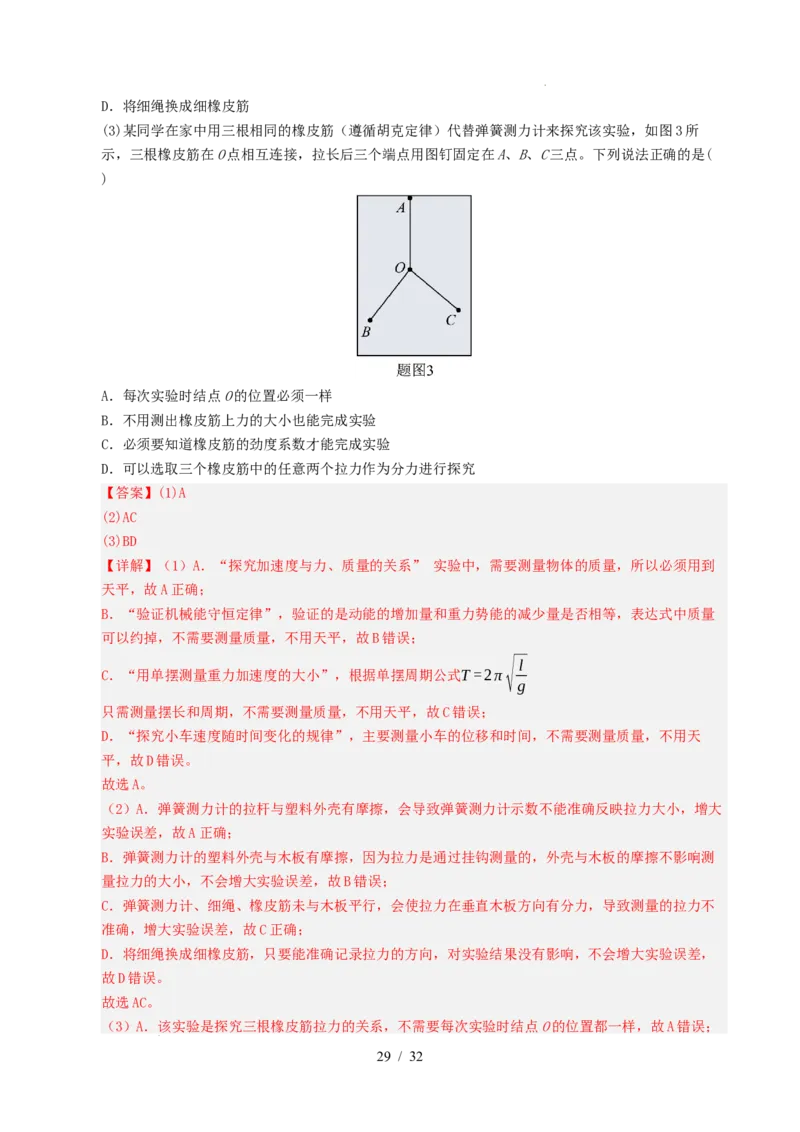
物理力学实验考点主要集中在基础仪
考点1 基本仪
2021、2022、2023、2024、2025 器使用和常见力学实验上。基础仪器使用
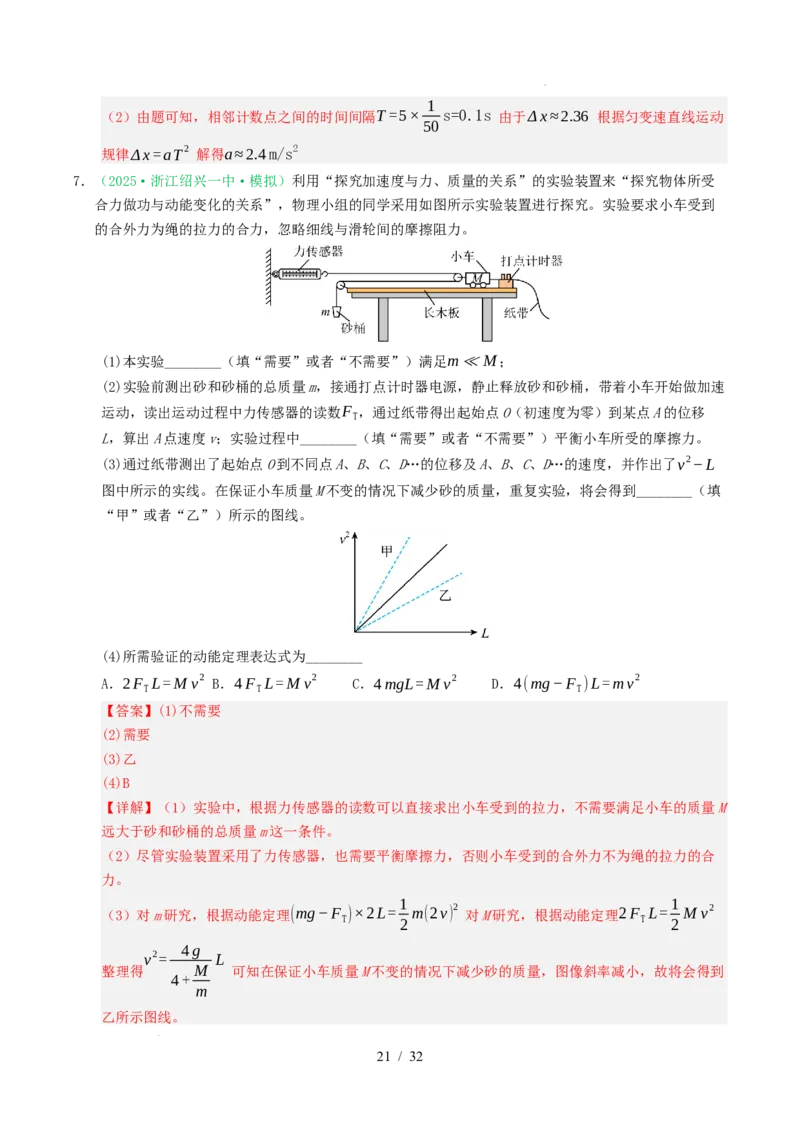
器使用
方面,游标卡尺等的读数是常考内容。常
见力学实验则涵盖多个经典实验,如
考点2 弹簧类 2023
“探究小车速度随时间变化的规律”“探
究加速度与物体受力、物体质量的关系”
考点3 平抛运 “探究弹簧弹力与形变量的关系”“探究
2022、2023
动 两个互成角度的力的合成规律”“探究平
抛运动的特点”“验证机械能守恒定律”
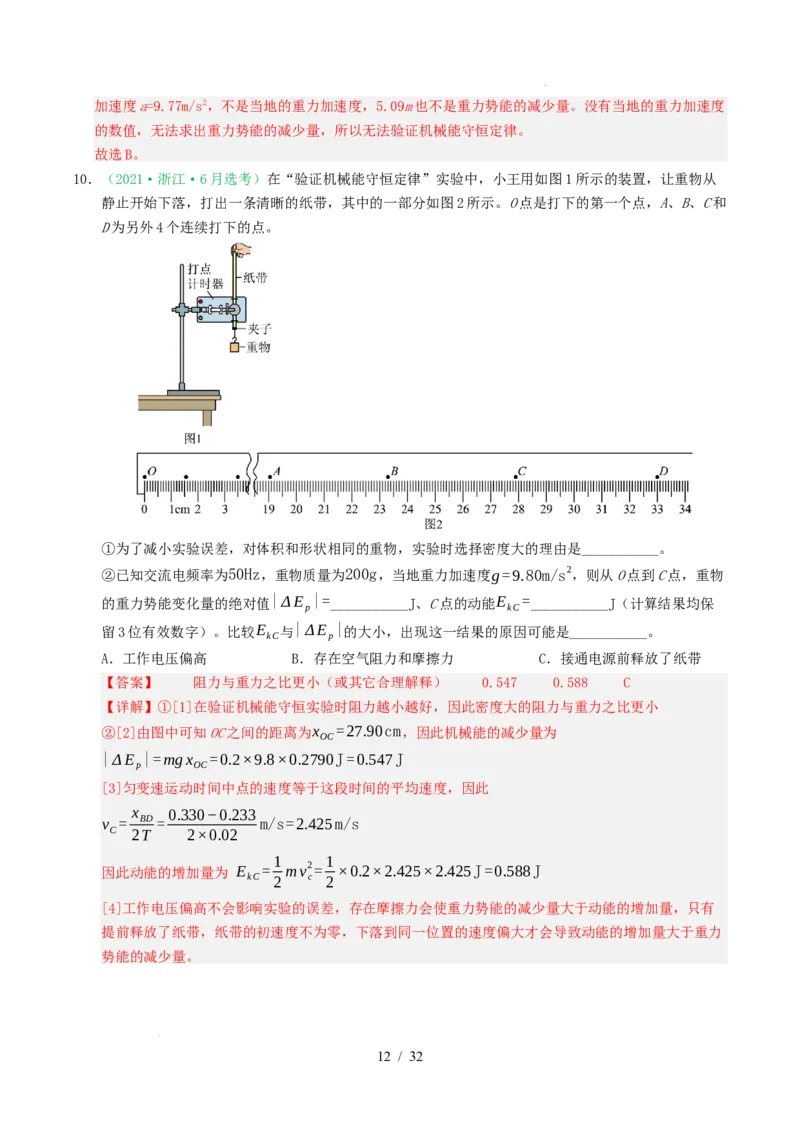
考点4 验证机 “验证动量守恒定律” 以及 “用单摆测
2021、2024
械能守恒定律 量重力加速度的大小” 等均有考查。命
题注重对实验原理的理解、数据处理和误
差分析,且有加强情境化试题考查的趋
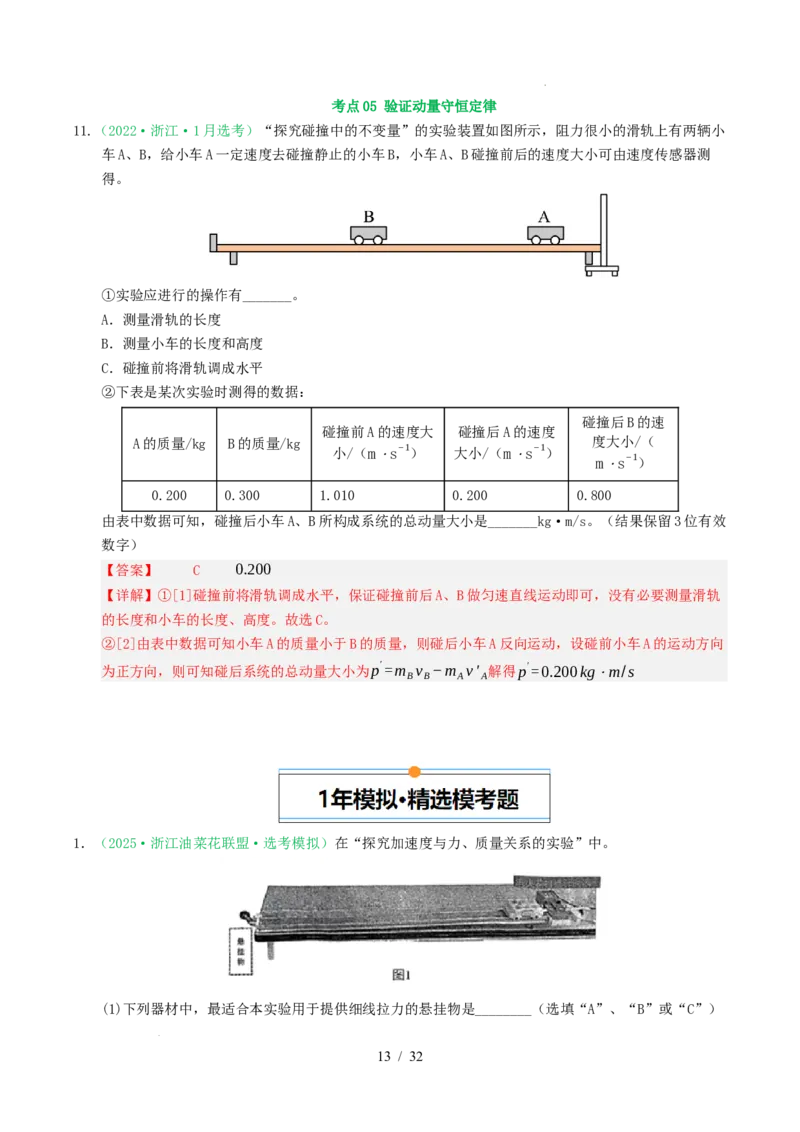
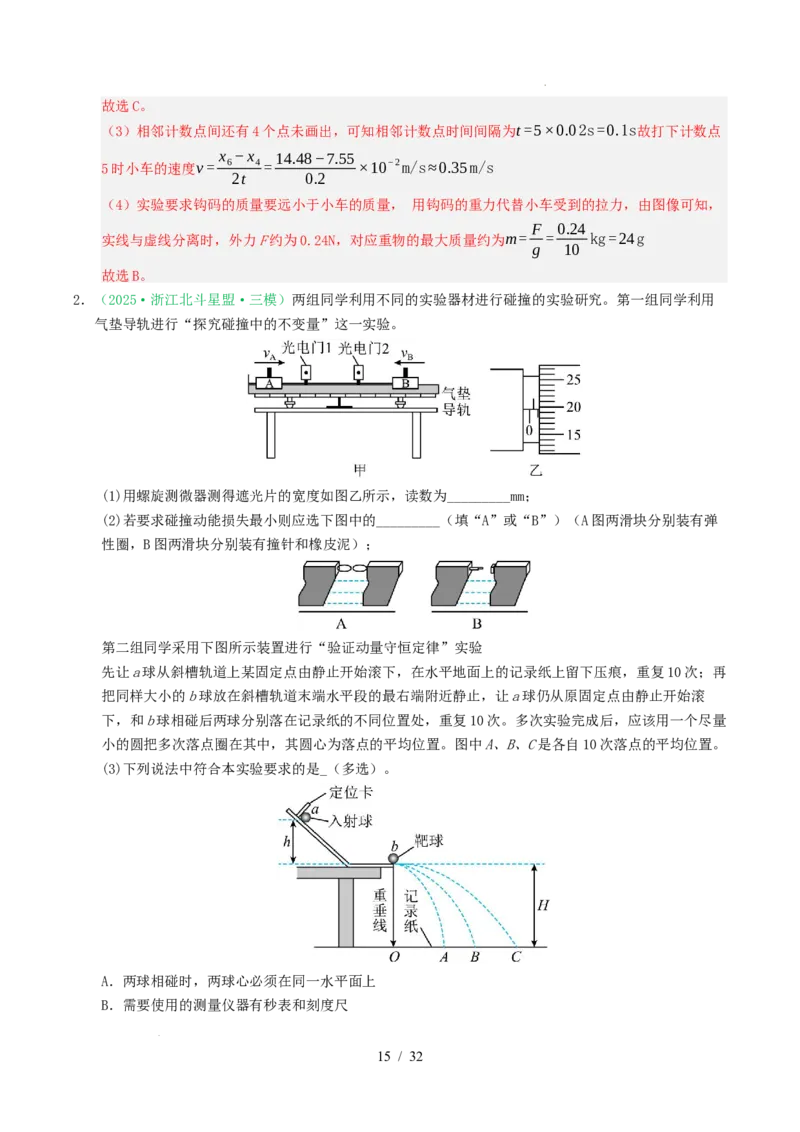
考点5 验证动
势,还可能会改变实验条件,要求学生具
2022
量守恒定律
备良好的实验素养和创新能力,能将所学
知识灵活应用于新情境中。
考点01 基本仪器使用
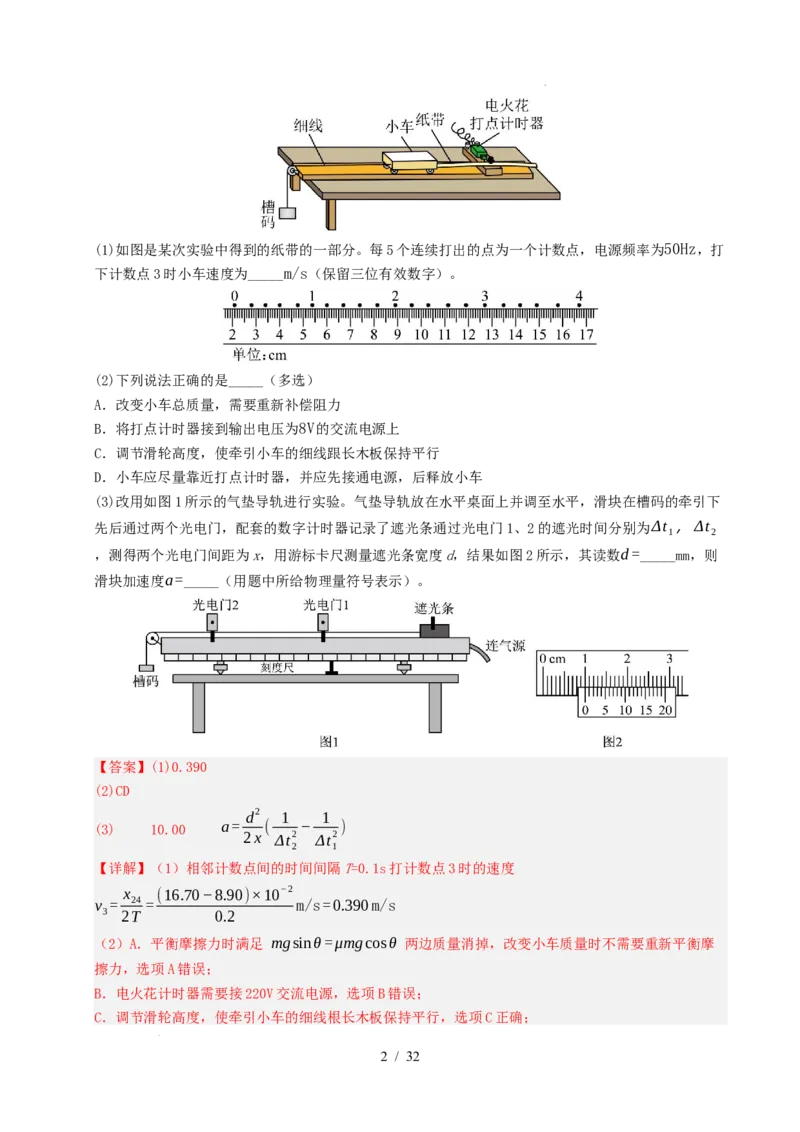
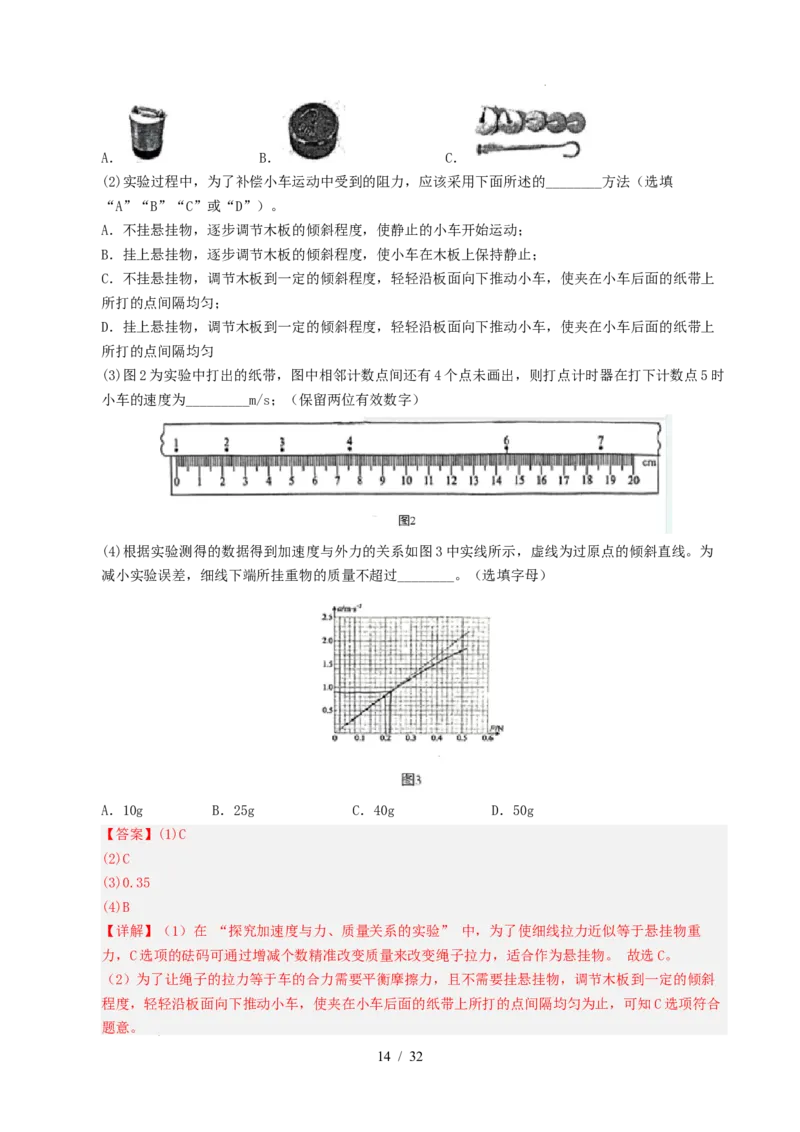
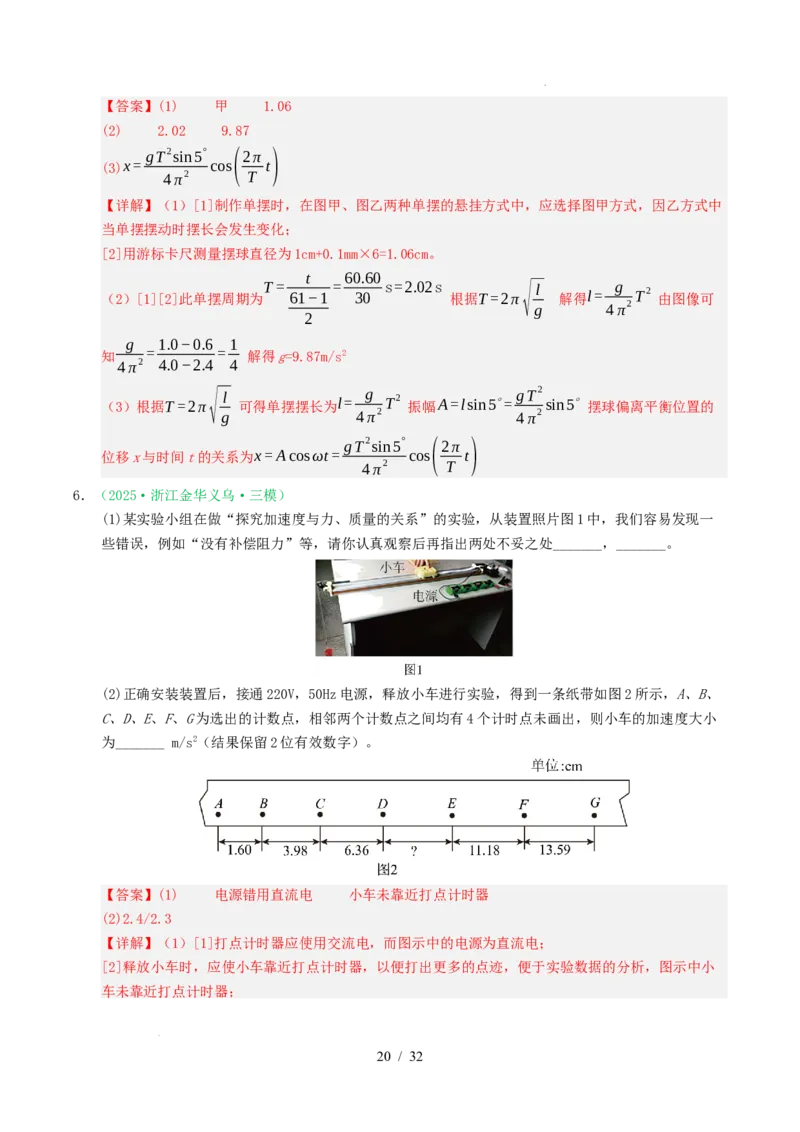
1.(2025·浙江·1月选考)“探究加速度与力、质量的关系”的实验装置如图所示。
1 / 32
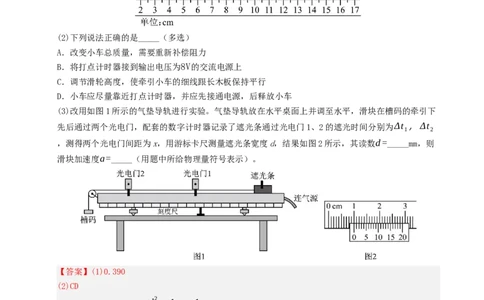
学科网(北京)股份有限公司(1)如图是某次实验中得到的纸带的一部分。每5个连续打出的点为一个计数点,电源频率为50Hz,打
下计数点3时小车速度为_____m/s(保留三位有效数字)。
(2)下列说法正确的是_____(多选)
A.改变小车总质量,需要重新补偿阻力
B.将打点计时器接到输出电压为8V的交流电源上
C.调节滑轮高度,使牵引小车的细线跟长木板保持平行
D.小车应尽量靠近打点计时器,并应先接通电源,后释放小车
(3)改用如图1所示的气垫导轨进行实验。气垫导轨放在水平桌面上并调至水平,滑块在槽码的牵引下
先后通过两个光电门,配套的数字计时器记录了遮光条通过光电门1、2的遮光时间分别为Δt ,Δt
1 2
,测得两个光电门间距为x,用游标卡尺测量遮光条宽度d,结果如图2所示,其读数d=_____mm,则
滑块加速度a=_____(用题中所给物理量符号表示)。
【答案】(1)0.390
(2)CD
d2 1 1
(3) 10.00 a= ( − )
2x Δt2 Δt2
2 1
【详解】(1)相邻计数点间的时间间隔T=0.1s打计数点3时的速度
x (16.70−8.90)×10−2
v = 24 = m/s=0.390m/s
3 2T 0.2
(2)A.平衡摩擦力时满足 mgsinθ=μmgcosθ 两边质量消掉,改变小车质量时不需要重新平衡摩
擦力,选项A错误;
B.电火花计时器需要接220V交流电源,选项B错误;
C.调节滑轮高度,使牵引小车的细线根长木板保持平行,选项C正确;
2 / 32
学科网(北京)股份有限公司D.小车应尽量接近打点计时器,并应该先接通电源后释放小车,以充分利用纸带,选项D正确。
故选CD。
(3)[1]遮光条宽度d=10mm+0.05mm×0=10.00mm
[2]经过两光电门时的速度分别为
d
v =
1 Δt
1
d
v =
2 Δt
2
d2 1 1
根据 v2−v2=2ax 解得 a= ( − )
2 1 2x Δt2 Δt2
2 1
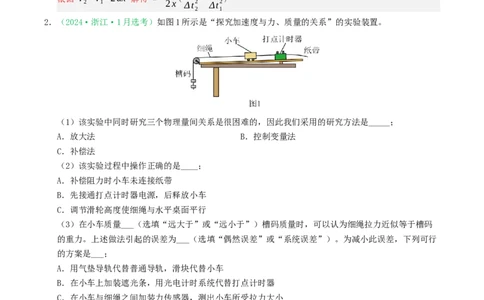
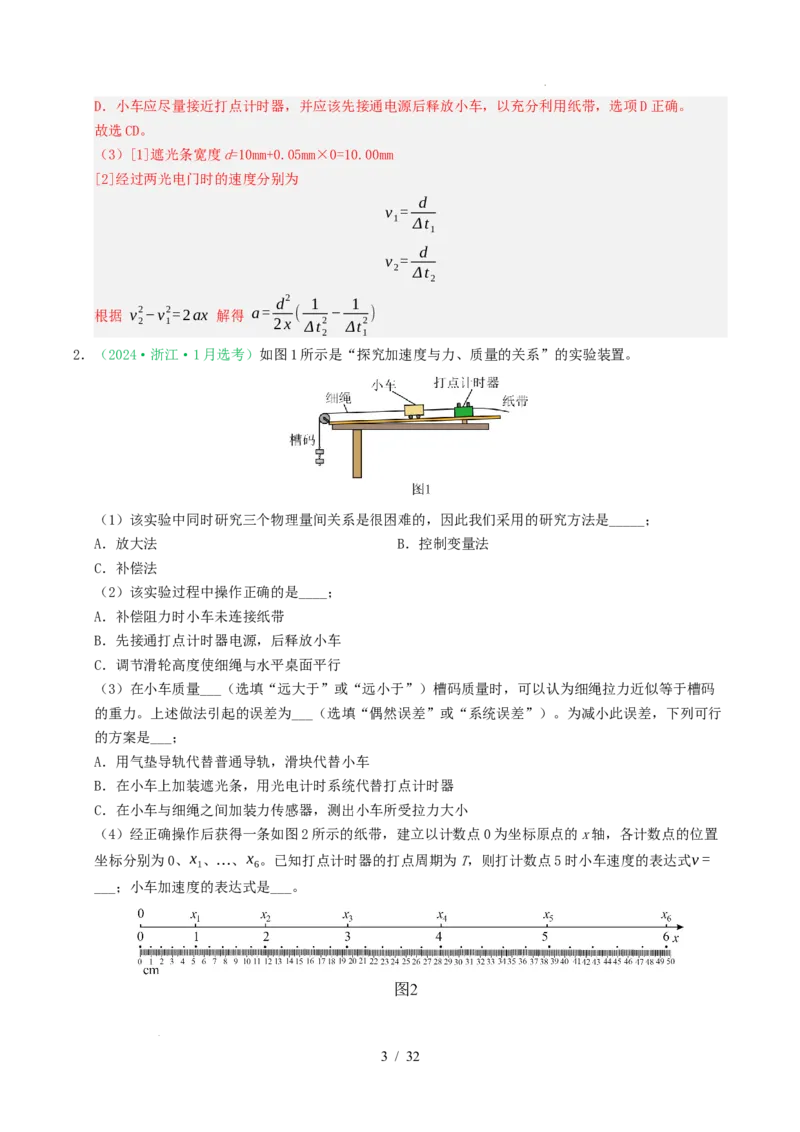
2.(2024·浙江·1月选考)如图1所示是“探究加速度与力、质量的关系”的实验装置。
(1)该实验中同时研究三个物理量间关系是很困难的,因此我们采用的研究方法是_____;
A.放大法 B.控制变量法
C.补偿法
(2)该实验过程中操作正确的是____;
A.补偿阻力时小车未连接纸带
B.先接通打点计时器电源,后释放小车
C.调节滑轮高度使细绳与水平桌面平行
(3)在小车质量___(选填“远大于”或“远小于”)槽码质量时,可以认为细绳拉力近似等于槽码
的重力。上述做法引起的误差为___(选填“偶然误差”或“系统误差”)。为减小此误差,下列可行
的方案是___;
A.用气垫导轨代替普通导轨,滑块代替小车
B.在小车上加装遮光条,用光电计时系统代替打点计时器
C.在小车与细绳之间加装力传感器,测出小车所受拉力大小
(4)经正确操作后获得一条如图2所示的纸带,建立以计数点0为坐标原点的x轴,各计数点的位置
坐标分别为0、x 、…、x 。已知打点计时器的打点周期为T,则打计数点5时小车速度的表达式v=
1 6
___;小车加速度的表达式是___。
3 / 32
学科网(北京)股份有限公司x −2x x −2x x +x −(x +x )
A.a= 6 3 B.a= 6 3 C.a= 5 4 3 2
(15T) 2 (3T) 2 (10T) 2
x −x
【答案】 B B 远大于 系统误差 C 6 4 A
10T
【详解】(1)[1]该实验中同时研究三个物理量间关系是很困难的,因此我们可以控制其中一个物理
量不变,研究另外两个物理量之间的关系,即采用了控制变量法。 故选B。
(2)[2]A.补偿阻力时小车需要连接纸带,一方面是需要连同纸带所受的阻力一并平衡,另外一方面
是通过纸带上的点间距判断小车是否在长木板上做匀速直线运动,故A错误;
B.由于小车速度较快,且运动距离有限,打出的纸带长度也有限,为了能在长度有限的纸带上尽可能
多地获取间距适当的数据点,实验时应先接通打点计时器电源,后释放小车,故B正确;
C.为使小车所受拉力与速度同向,应调节滑轮高度使细绳与长木板平行,故C错误。 故选B。
(3)[3]设小车质量为M,槽码质量为m。对小车和槽码根据牛顿第二定律分别有
F=Ma
mg−F=ma
Mmg
联立解得 F= 由上式可知在小车质量远大于槽码质量时,可以认为细绳拉力近似等于槽码的重
m+M
力。
[4]上述做法引起的误差是由于实验方法或原理不完善造成的,属于系统误差。
[5]该误差是将细绳拉力用槽码重力近似替代所引入的,不是由于车与木板间存在阻力(实验中已经补
偿了阻力)或是速度测量精度低造成的,为减小此误差,可在小车与细绳之间加装力传感器,测出小
车所受拉力大小。 故选C。
(4)[6]相邻两计数点间的时间间隔为 t=5T 打计数点5时小车速度的表达式为
x −x x −x
v= 6 4= 6 4
2t 10T
x −x −x x −2x
[7]根据逐差法可得小车加速度的表达式是 a= 6 3 3= 6 3 故选A。
(3t) 2 (15T) 2
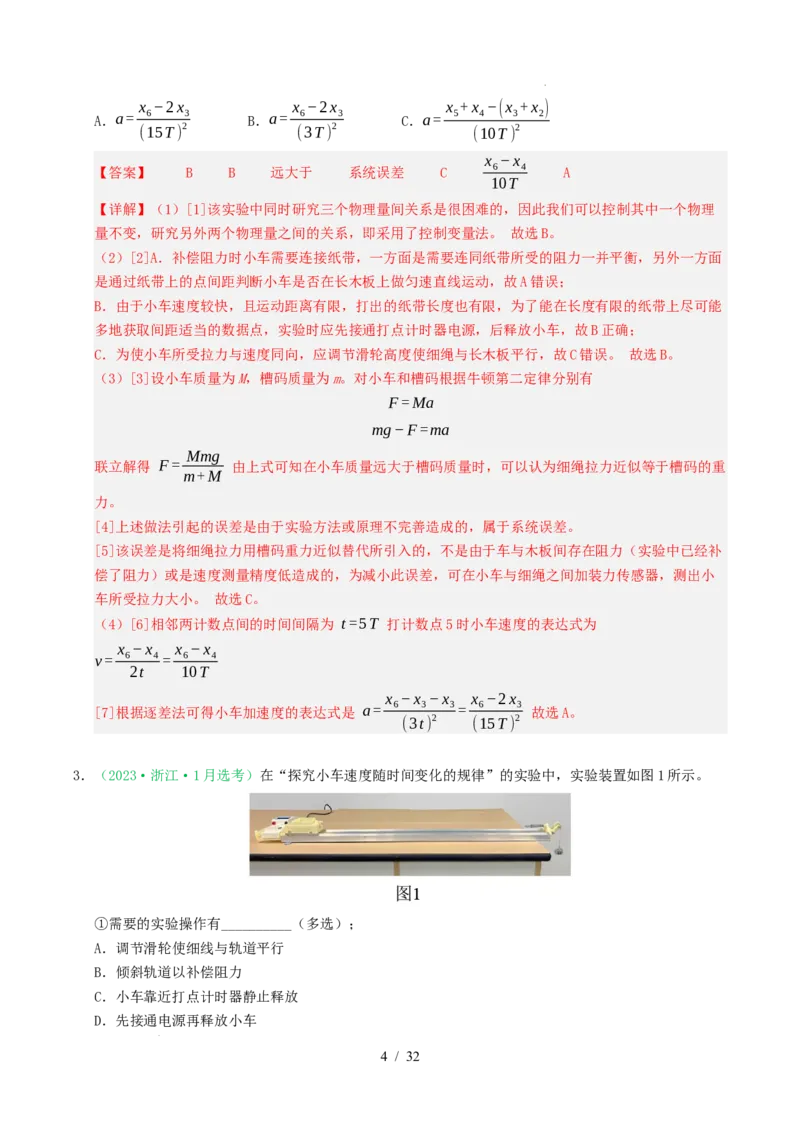
3.(2023·浙江·1月选考)在“探究小车速度随时间变化的规律”的实验中,实验装置如图1所示。
①需要的实验操作有__________(多选);
A.调节滑轮使细线与轨道平行
B.倾斜轨道以补偿阻力
C.小车靠近打点计时器静止释放
D.先接通电源再释放小车
4 / 32
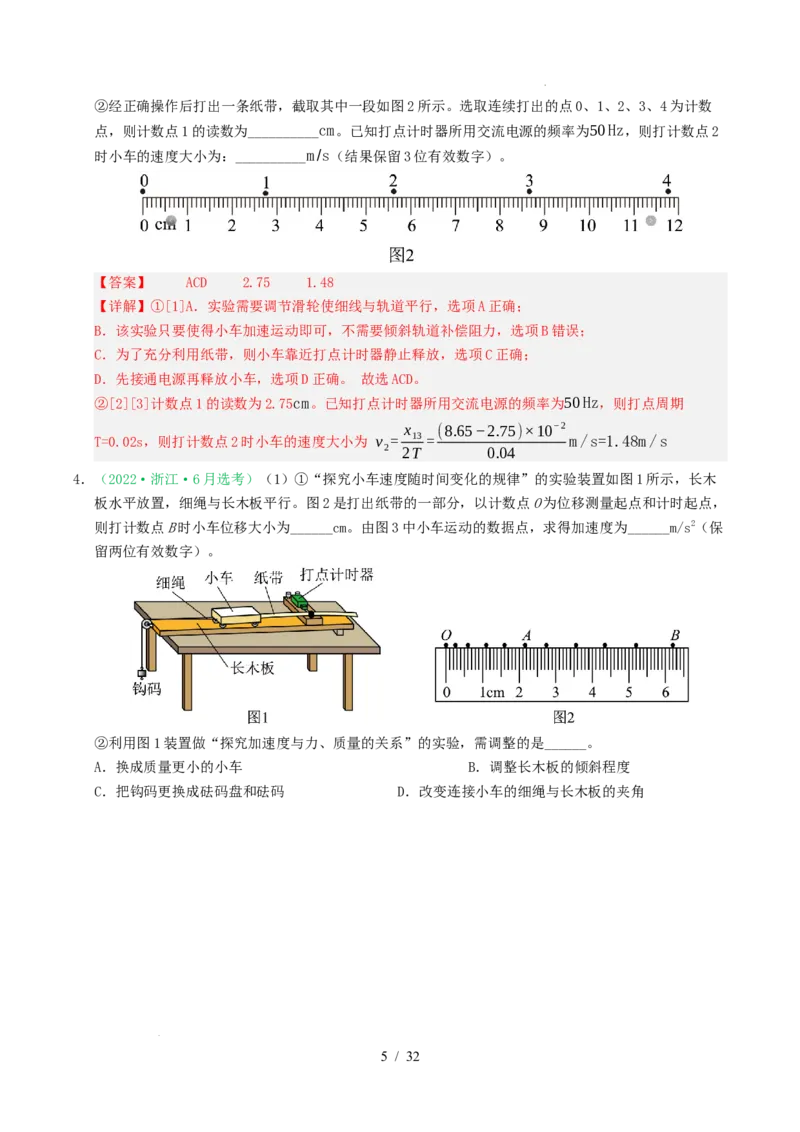
学科网(北京)股份有限公司②经正确操作后打出一条纸带,截取其中一段如图2所示。选取连续打出的点0、1、2、3、4为计数
点,则计数点1的读数为__________cm。已知打点计时器所用交流电源的频率为50Hz,则打计数点2
时小车的速度大小为:__________m/s(结果保留3位有效数字)。
【答案】 ACD 2.75 1.48
【详解】①[1]A.实验需要调节滑轮使细线与轨道平行,选项A正确;
B.该实验只要使得小车加速运动即可,不需要倾斜轨道补偿阻力,选项B错误;
C.为了充分利用纸带,则小车靠近打点计时器静止释放,选项C正确;
D.先接通电源再释放小车,选项D正确。 故选ACD。
②[2][3]计数点1的读数为2.75cm。已知打点计时器所用交流电源的频率为50Hz,则打点周期
x (8.65−2.75)×10−2
T=0.02s,则打计数点2时小车的速度大小为 v = 13 = m/s=1.48m/s
2 2T 0.04
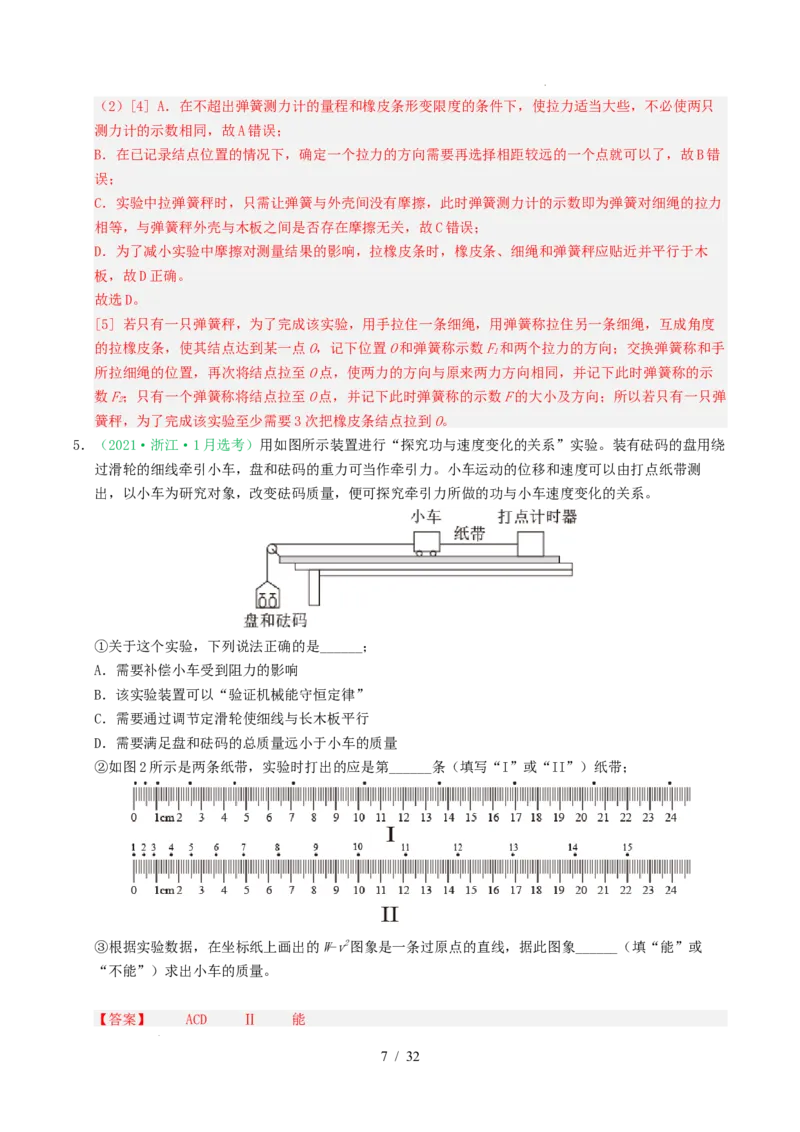
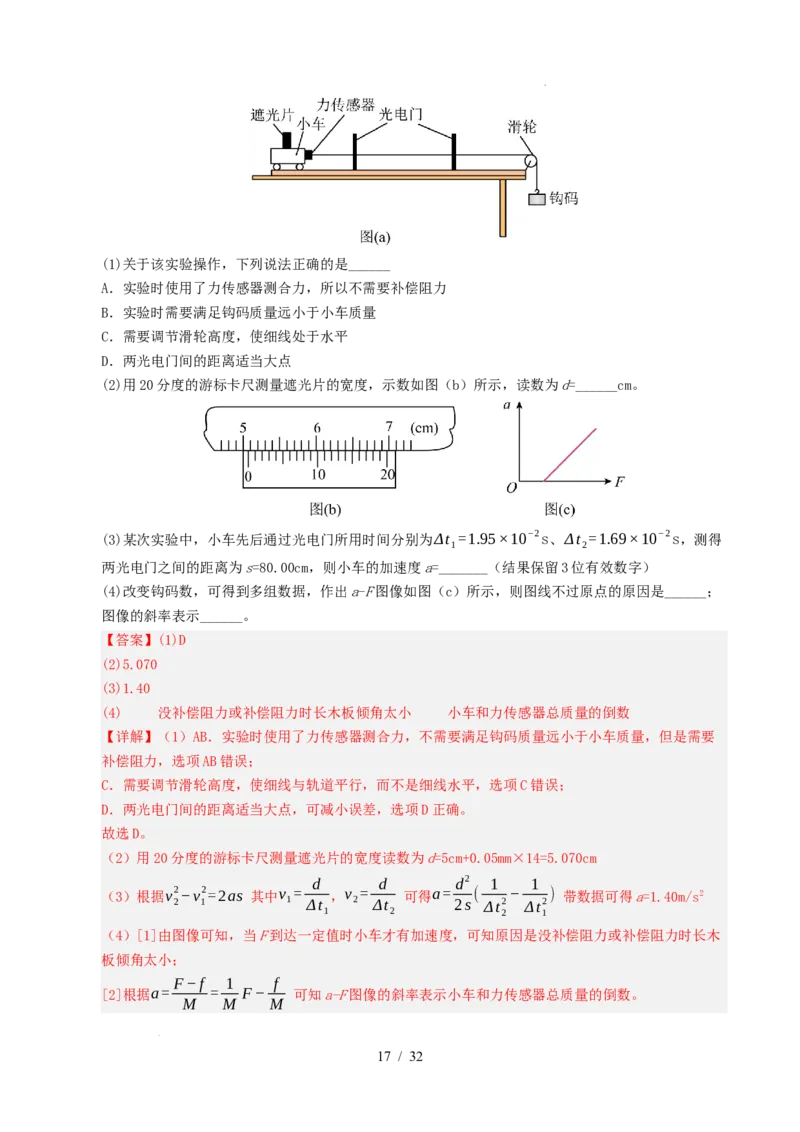
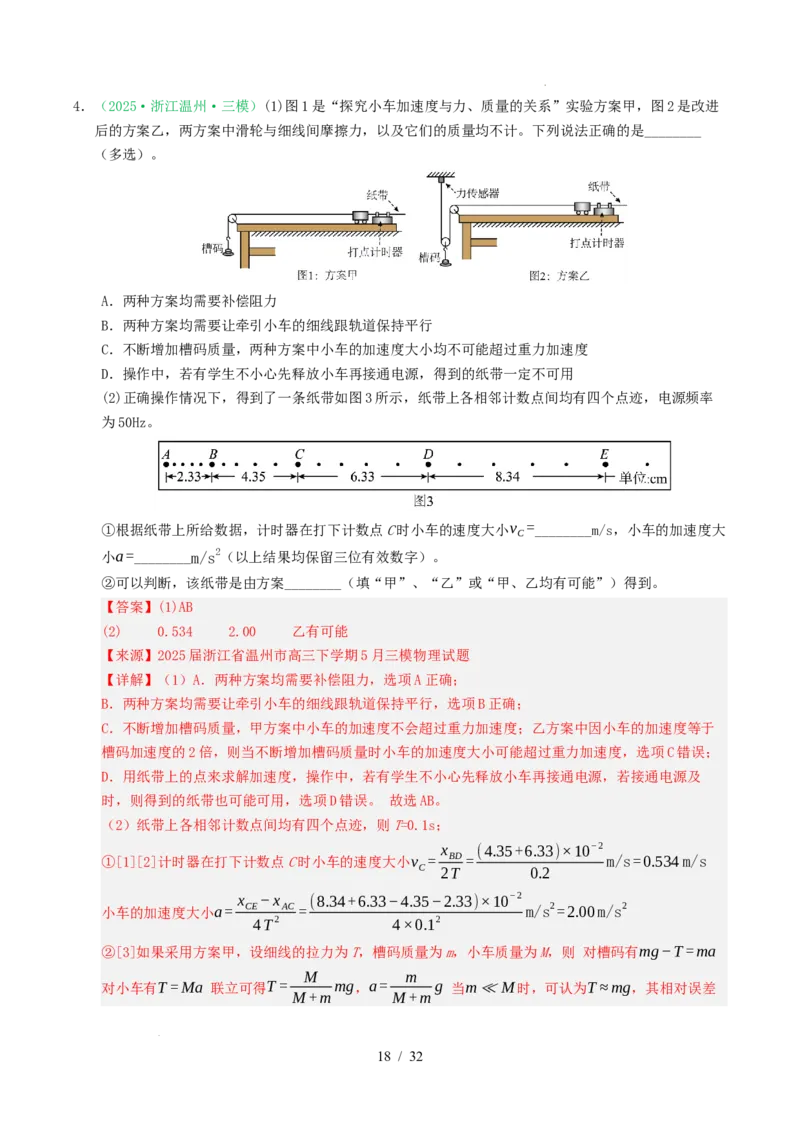
4.(2022·浙江·6月选考)(1)①“探究小车速度随时间变化的规律”的实验装置如图1所示,长木
板水平放置,细绳与长木板平行。图2是打出纸带的一部分,以计数点O为位移测量起点和计时起点,
则打计数点B时小车位移大小为______cm。由图3中小车运动的数据点,求得加速度为______m/s2(保
留两位有效数字)。
②利用图1装置做“探究加速度与力、质量的关系”的实验,需调整的是______。
A.换成质量更小的小车 B.调整长木板的倾斜程度
C.把钩码更换成砝码盘和砝码 D.改变连接小车的细绳与长木板的夹角
5 / 32
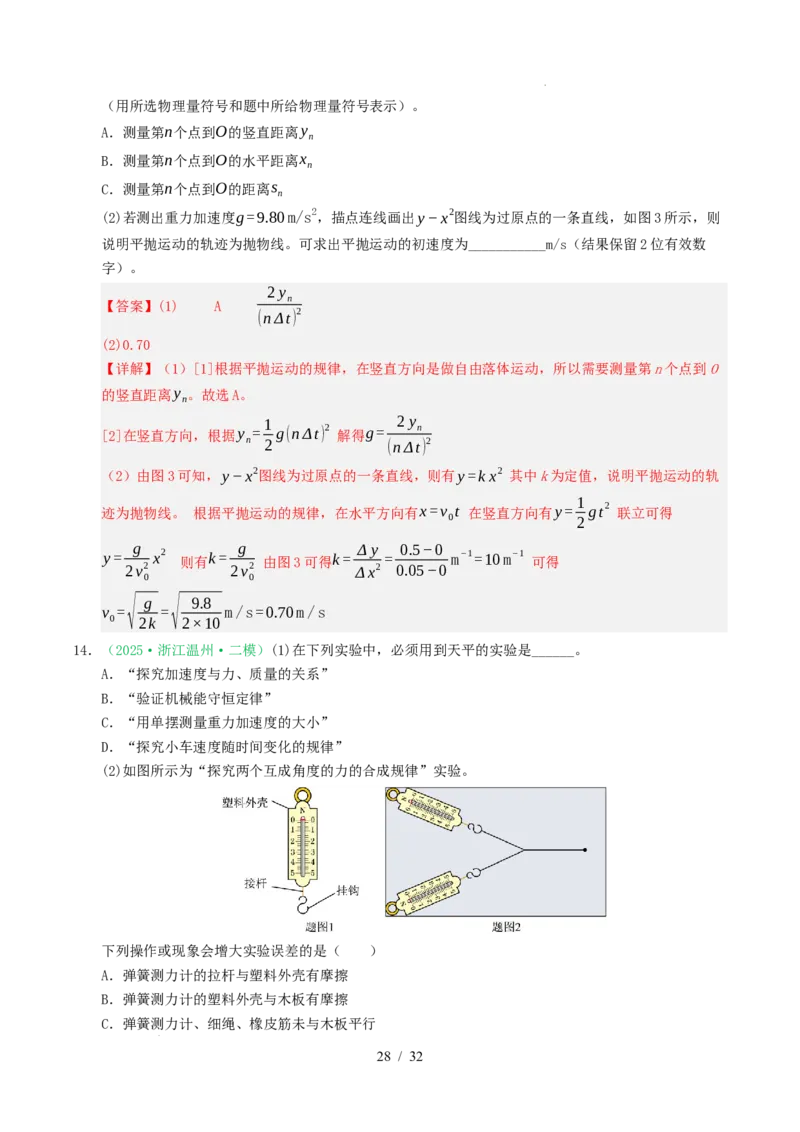
学科网(北京)股份有限公司(2)“探究求合力的方法”的实验装置如图4所示,在该实验中,
①下列说法正确的是______;
A.拉着细绳套的两只弹簧秤,稳定后读数应相同
B.在已记录结点位置的情况下,确定一个拉力的方向需要再选择相距较远的两点
C.测量时弹簧秤外壳与木板之间不能存在摩擦
D.测量时,橡皮条、细绳和弹簧秤应贴近并平行于木板
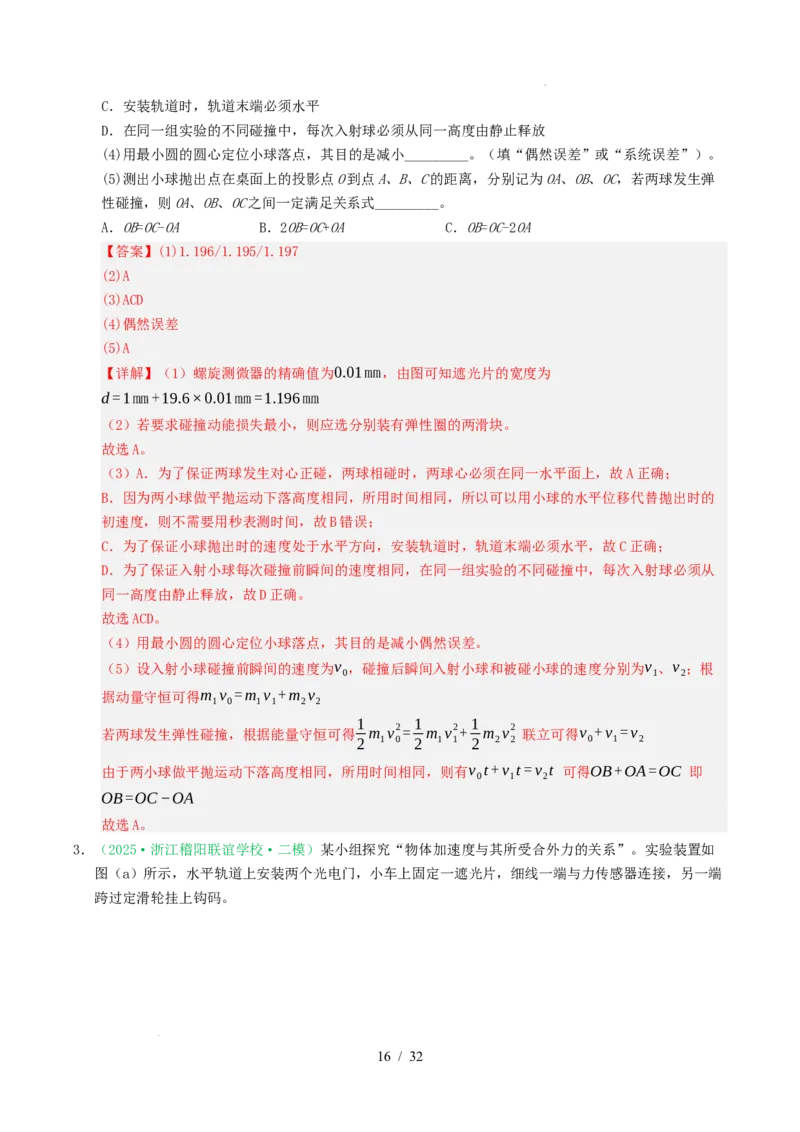
②若只有一只弹簧秤,为了完成该实验至少需要______(选填“2”、“3”或“4”)次把橡皮条结点
拉到O点。
【答案】 6.15~6.25 1.7 ~2.1 BC/CB D 3
【详解】(1)[1]依题意,打计数点B时小车位移大小为6.20cm,考虑到偶然误差,6.15cm~6.25cm也
可;
Δv 1.05−0.30
[2] 由图3中小车运动的数据点,有 a= = m/s2=1.9m/s2 考虑到偶然误差,
Δt 0.4
1.7m/s2~2.1 m/s2也可;
[3] A.利用图1装置“探究加速度与力、质量的关系”的实验时,需要满足小车质量远远大于钩码质
量,所以不需要换质量更小的车,故A错误;
B.利用图1装置“探究加速度与力、质量的关系”的实验时,需要利用小车斜向下的分力以平衡其摩
擦阻力,所以需要将长木板安打点计时器一端较滑轮一端适当的高一些,故B正确;
mg−f
C.以系统为研究对象,依题意“探究小车速度随时间变化的规律”实验时有
1.9m/s2≈
考虑
M+m
mg
到实际情况,即f≪mg,有
1.9m/s2≈
则可知 M≈4m 而利用图1装置“探究加速度与
M+m
力、质量的关系”的实验时要保证所悬挂质量远小于小车质量,即m≪M;可知目前实验条件不满
足,所以利用当前装置在“探究加速度与力、质量的关系”时,需将钩码更换成砝码盘和砝码,以满
足小车质量远远大于所悬挂物体的质量,故C正确;
D.实验过程中,需将连接砝码盘和小车的细绳应跟长木板始终保持平行,与之前的相同,故D错误。
故选BC。
6 / 32
学科网(北京)股份有限公司(2)[4] A.在不超出弹簧测力计的量程和橡皮条形变限度的条件下,使拉力适当大些,不必使两只
测力计的示数相同,故A错误;
B.在已记录结点位置的情况下,确定一个拉力的方向需要再选择相距较远的一个点就可以了,故B错
误;
C.实验中拉弹簧秤时,只需让弹簧与外壳间没有摩擦,此时弹簧测力计的示数即为弹簧对细绳的拉力
相等,与弹簧秤外壳与木板之间是否存在摩擦无关,故C错误;
D.为了减小实验中摩擦对测量结果的影响,拉橡皮条时,橡皮条、细绳和弹簧秤应贴近并平行于木
板,故D正确。
故选D。
[5] 若只有一只弹簧秤,为了完成该实验,用手拉住一条细绳,用弹簧称拉住另一条细绳,互成角度
的拉橡皮条,使其结点达到某一点O,记下位置O和弹簧称示数F和两个拉力的方向;交换弹簧称和手
1
所拉细绳的位置,再次将结点拉至O点,使两力的方向与原来两力方向相同,并记下此时弹簧称的示
数F;只有一个弹簧称将结点拉至O点,并记下此时弹簧称的示数F的大小及方向;所以若只有一只弹
2
簧秤,为了完成该实验至少需要3次把橡皮条结点拉到O。
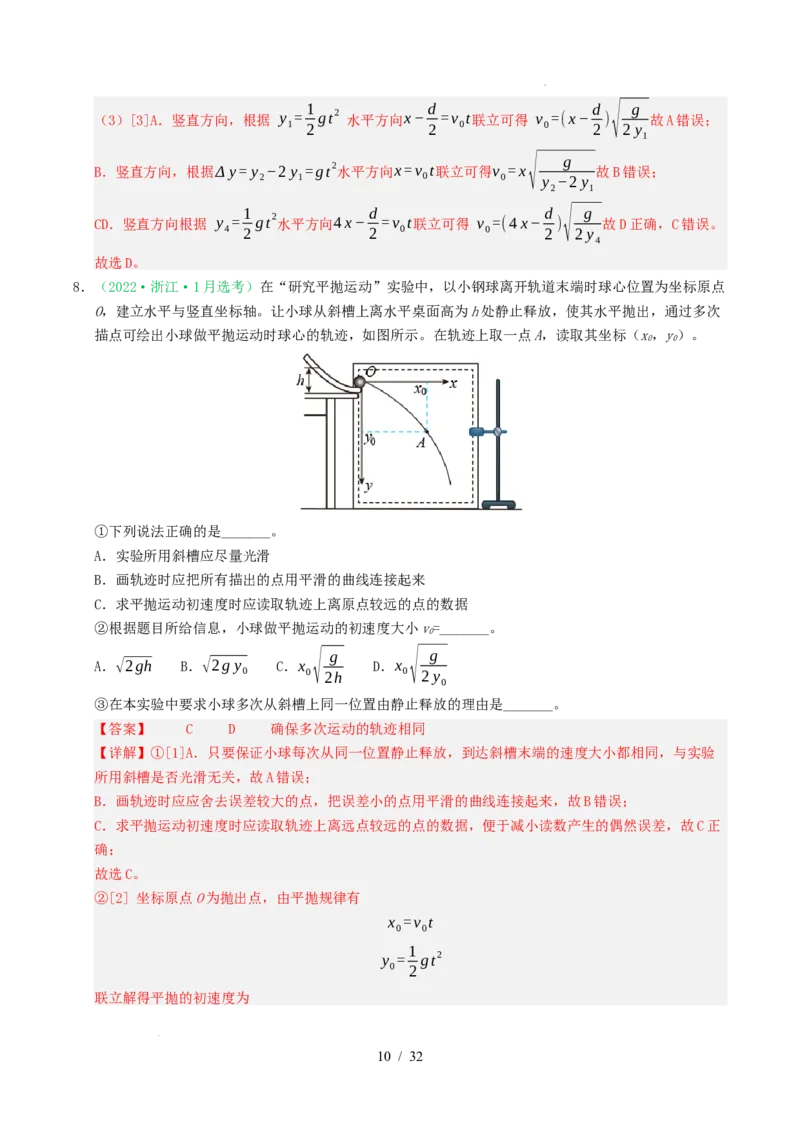
5.(2021·浙江·1月选考)用如图所示装置进行“探究功与速度变化的关系”实验。装有砝码的盘用绕
过滑轮的细线牵引小车,盘和砝码的重力可当作牵引力。小车运动的位移和速度可以由打点纸带测
出,以小车为研究对象,改变砝码质量,便可探究牵引力所做的功与小车速度变化的关系。
①关于这个实验,下列说法正确的是______;
A.需要补偿小车受到阻力的影响
B.该实验装置可以“验证机械能守恒定律”
C.需要通过调节定滑轮使细线与长木板平行
D.需要满足盘和砝码的总质量远小于小车的质量
②如图2所示是两条纸带,实验时打出的应是第______条(填写“I”或“II”)纸带;
③根据实验数据,在坐标纸上画出的W-v2图象是一条过原点的直线,据此图象______(填“能”或
“不能”)求出小车的质量。
【答案】 ACD Ⅱ 能
7 / 32
学科网(北京)股份有限公司【详解】①[1]A.题中需要将盘和砝码的重力可当作牵引力,所以首先需要补偿小车受到阻力的影
响,即抬高长木板右端,小车在不接盘和砝码的情况下,轻推小车,使小车做匀速直线运动,说明小
车重力沿斜面的分力与小车所受阻力等大反向,A正确;
D.然后挂上盘与砝码m,根据牛顿第二定律 mg−T=ma 对小车M,根据牛顿第二定律 T=Ma 两
M 1
T= ⋅mg= ⋅mg
式相比解得绳子拉力 M+m m 当满足盘和砝码的总质量远小于小车的质量,即
1+
M
T=mg,盘和砝码的重力可当作牵引力,D正确;
B.实验过程中摩擦阻力无法消除,本实验装置无法验证“机械能守恒定律”故B错误。
C.细线与长木板平行需要平行,保证绳子的拉力与小车运动方向一致,这样盘和砝码的重力可完全当
作牵引力,C正确。
故选ACD。
②[2]小车做匀加速直线运动,位移逐渐增大,所以实验打出的纸带是第II条。
1 1
③[3]根据动能定理可知W = Mv2 ,图像的斜率为 M,据W−v2能求出小车的质量。
2 2
考点02 弹簧类
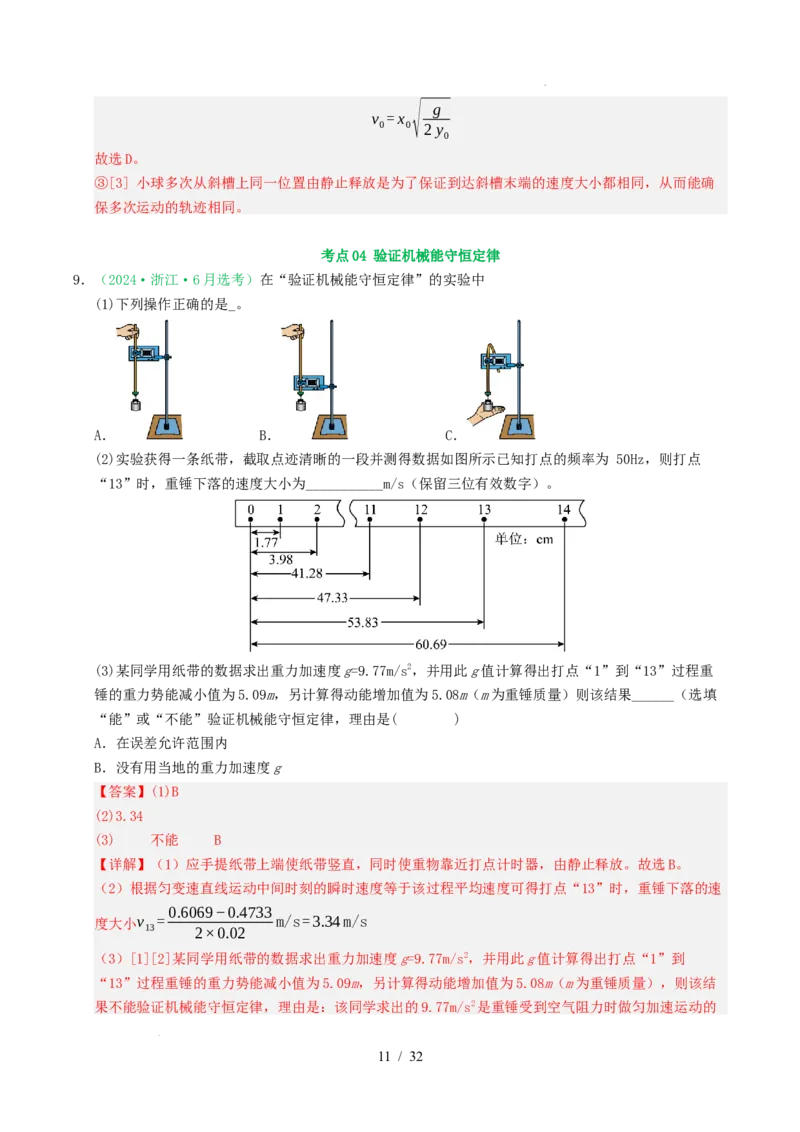
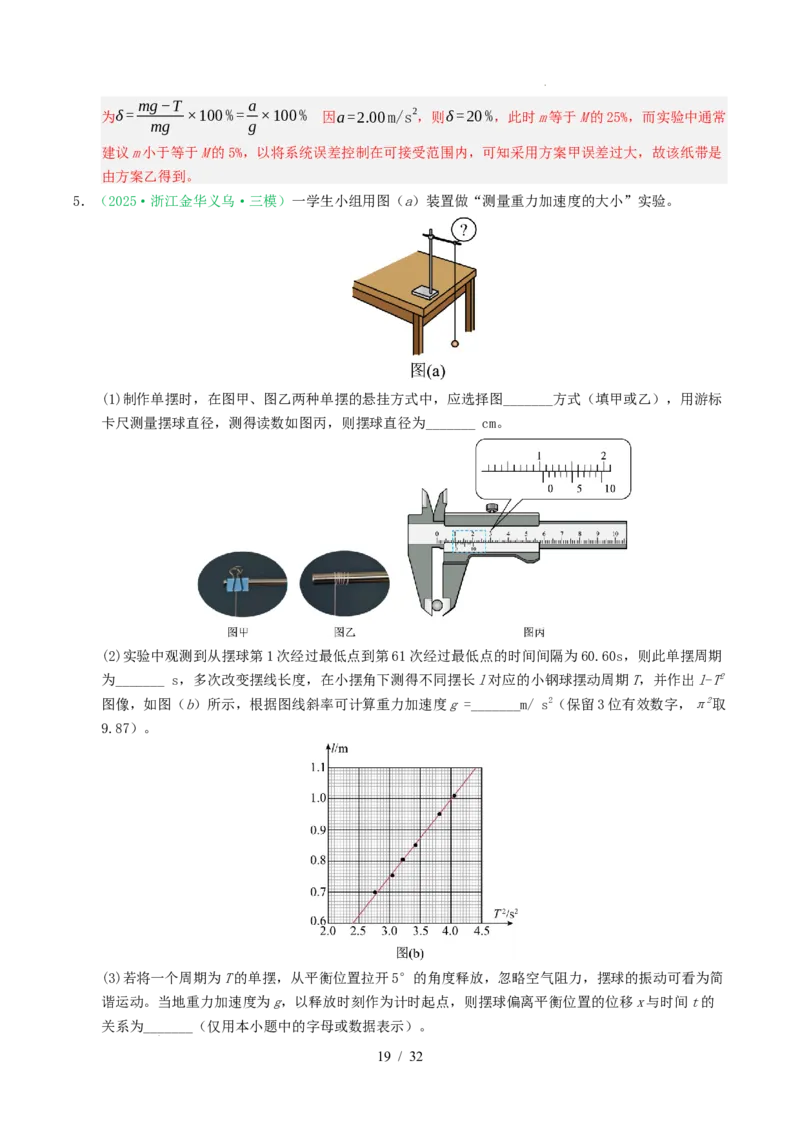
6.(2023·浙江·6月选考)如图所示,某同学把A、B两根不同的弹簧串接竖直悬挂,探究A、B弹簧弹
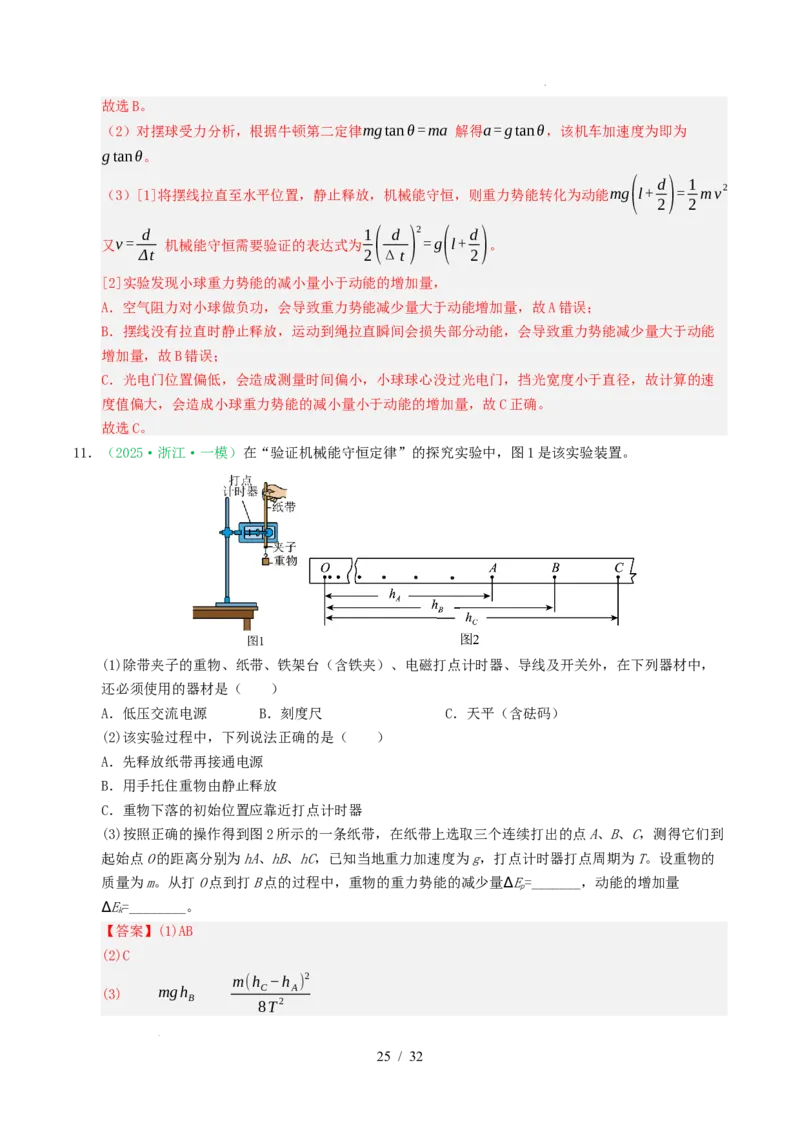
力与伸长量的关系。在B弹簧下端依次挂上质量为m的钩码,静止时指针所指刻度x 、x 的数据如表。
A B
钩码个数 0 1 2 …
x/cm 7.75 8.53 9.30 …
A
x/cm 16.45 18.52 20.60 …
B
钩码个数为1时,弹簧A的伸长量Δx =________cm,弹簧B的伸长量Δx =________cm,两根弹簧弹性
A B
势能的增加量ΔE ________mg(Δx +Δx )(选填“=”、“<”或“>”)。
p A B
【答案】 0.78 1.29 <
【详解】[1]钩码个数为1时,弹簧A的伸长量Δx =8.53cm-7.75cm=0.78cm
A
[2]弹簧B的伸长量Δx =18.52cm-16.45cm-0.78cm=1.29cm
B
[3]在B弹簧下端挂上钩码到系统在无外力作用而处于静止状态的过程,需要有外力迫使系统最终处于
静止状态,外力对系统做负功,系统机械能是减少的,所以两根弹簧弹性势能的增加量小于钩码减小
8 / 32
学科网(北京)股份有限公司的重力势能,即ΔE

