

文档内容
2025 年甘肃高考物理部分试题
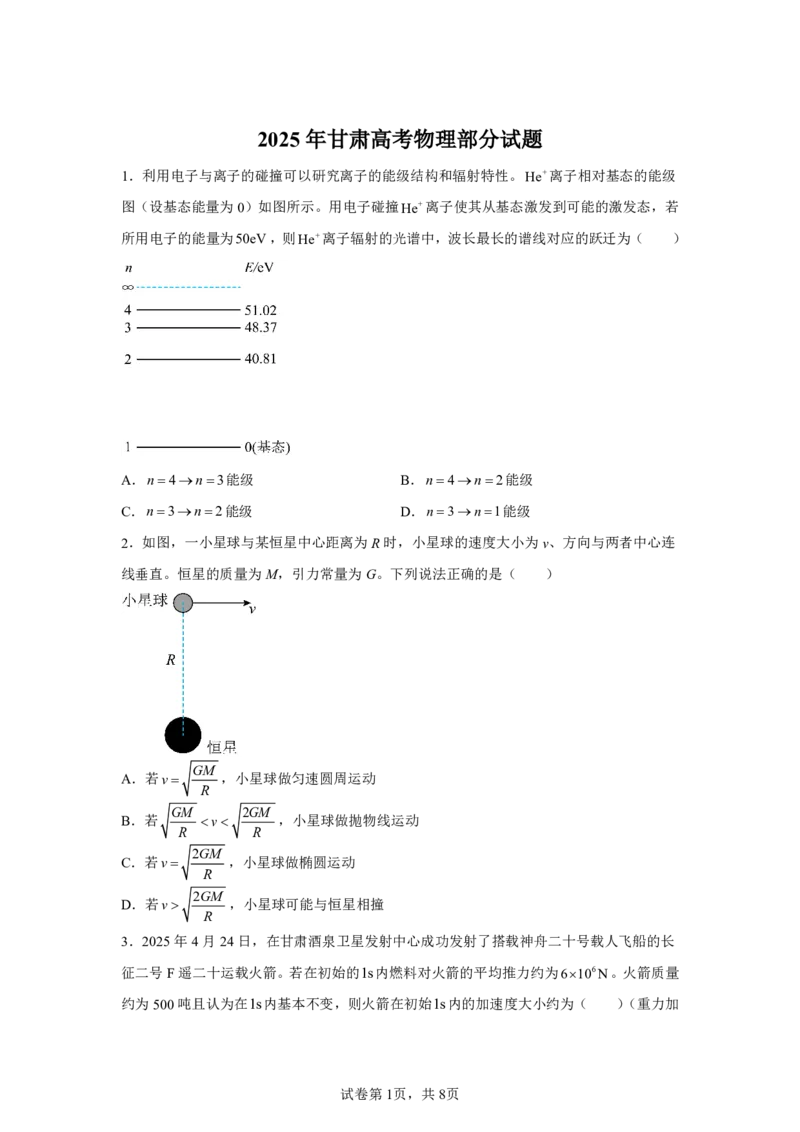
1.利用电子与离子的碰撞可以研究离子的能级结构和辐射特性。He+离子相对基态的能级
图(设基态能量为0)如图所示。用电子碰撞He+离子使其从基态激发到可能的激发态,若
所用电子的能量为50eV,则He+离子辐射的光谱中,波长最长的谱线对应的跃迁为( )
A.n4n3能级 B.n4n2能级
C.n3n2能级 D.n3n1能级
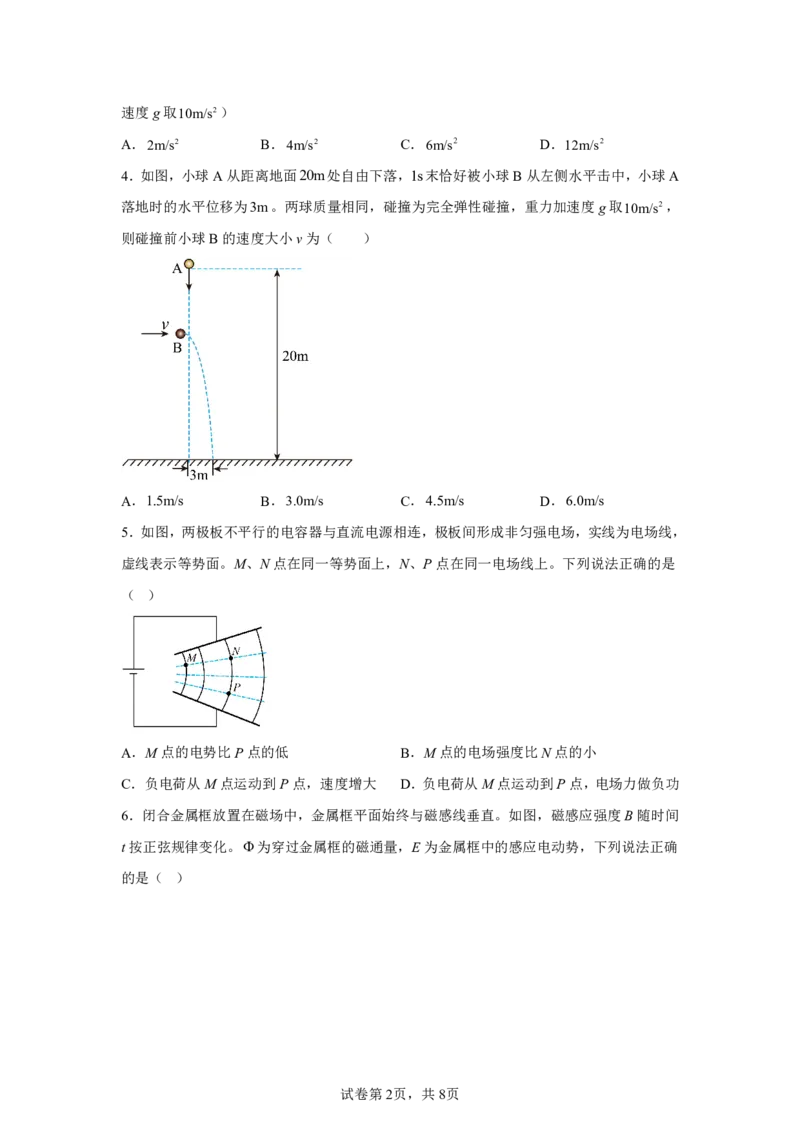
2.如图,一小星球与某恒星中心距离为R时,小星球的速度大小为v、方向与两者中心连
线垂直。恒星的质量为M,引力常量为G。下列说法正确的是( )
GM
A.若v ,小星球做匀速圆周运动
R
GM 2GM
B.若 v ,小星球做抛物线运动
R R
2GM
C.若v ,小星球做椭圆运动
R
2GM
D.若v ,小星球可能与恒星相撞
R
3.2025年4月24日,在甘肃酒泉卫星发射中心成功发射了搭载神舟二十号载人飞船的长
征二号F遥二十运载火箭。若在初始的1s内燃料对火箭的平均推力约为6106N。火箭质量
约为500吨且认为在1s内基本不变,则火箭在初始1s内的加速度大小约为( )(重力加
试卷第1页,共8页速度g取10m/s2)
A.2m/s2 B.4m/s2 C.6m/s2 D.12m/s2
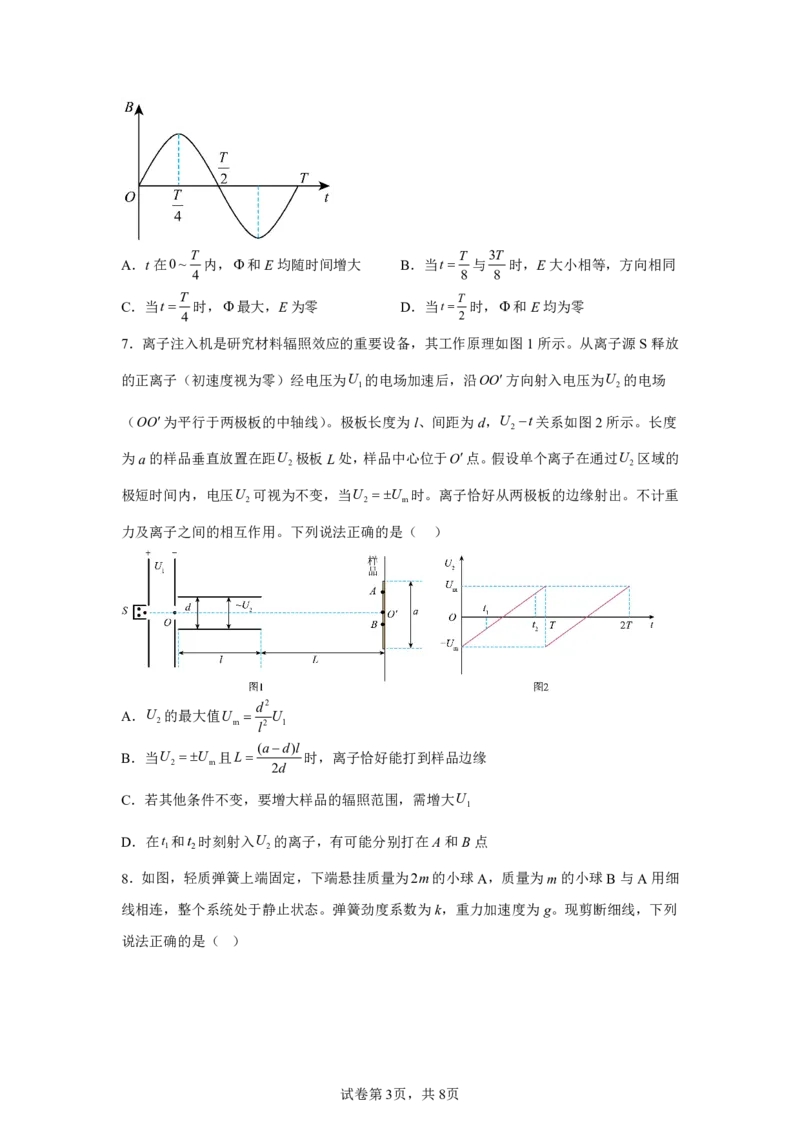
4.如图,小球A从距离地面20m处自由下落,1s末恰好被小球B从左侧水平击中,小球A
落地时的水平位移为3m。两球质量相同,碰撞为完全弹性碰撞,重力加速度g取10m/s2,
则碰撞前小球B的速度大小v为( )
A.1.5m/s B.3.0m/s C.4.5m/s D.6.0m/s
5.如图,两极板不平行的电容器与直流电源相连,极板间形成非匀强电场,实线为电场线,
虚线表示等势面。M、N点在同一等势面上,N、P点在同一电场线上。下列说法正确的是
( )
A.M点的电势比P点的低 B.M点的电场强度比N点的小
C.负电荷从M点运动到P点,速度增大 D.负电荷从M点运动到P点,电场力做负功
6.闭合金属框放置在磁场中,金属框平面始终与磁感线垂直。如图,磁感应强度B随时间
t按正弦规律变化。为穿过金属框的磁通量,E为金属框中的感应电动势,下列说法正确
的是( )
试卷第2页,共8页T T 3T
A.t在0~ 内,和E均随时间增大 B.当t 与 时,E大小相等,方向相同
4 8 8
T T
C.当t 时,最大,E为零 D.当t 时,和E均为零
4 2
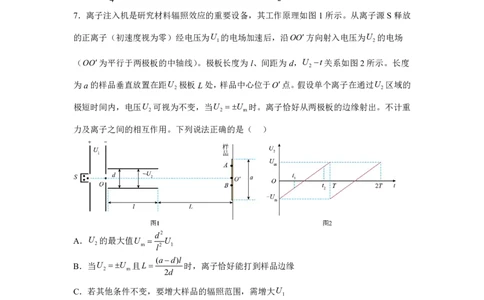
7.离子注入机是研究材料辐照效应的重要设备,其工作原理如图1所示。从离子源S释放
的正离子(初速度视为零)经电压为U 的电场加速后,沿OO方向射入电压为U 的电场
1 2
(OO为平行于两极板的中轴线)。极板长度为l、间距为d,U t关系如图2所示。长度
2
为a的样品垂直放置在距U 极板L处,样品中心位于O点。假设单个离子在通过U 区域的
2 2
极短时间内,电压U 可视为不变,当U U 时。离子恰好从两极板的边缘射出。不计重
2 2 m
力及离子之间的相互作用。下列说法正确的是( )
d2
A.U 的最大值U U
2 m l2 1
(ad)l
B.当U U 且L 时,离子恰好能打到样品边缘
2 m 2d
C.若其他条件不变,要增大样品的辐照范围,需增大U
1
D.在t 和t 时刻射入U 的离子,有可能分别打在A和B点
1 2 2
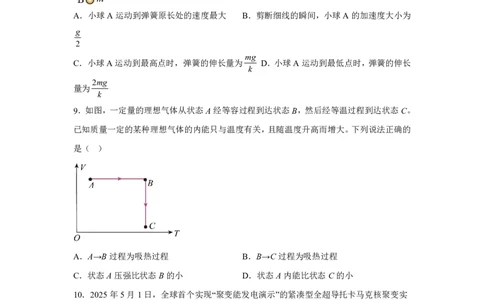
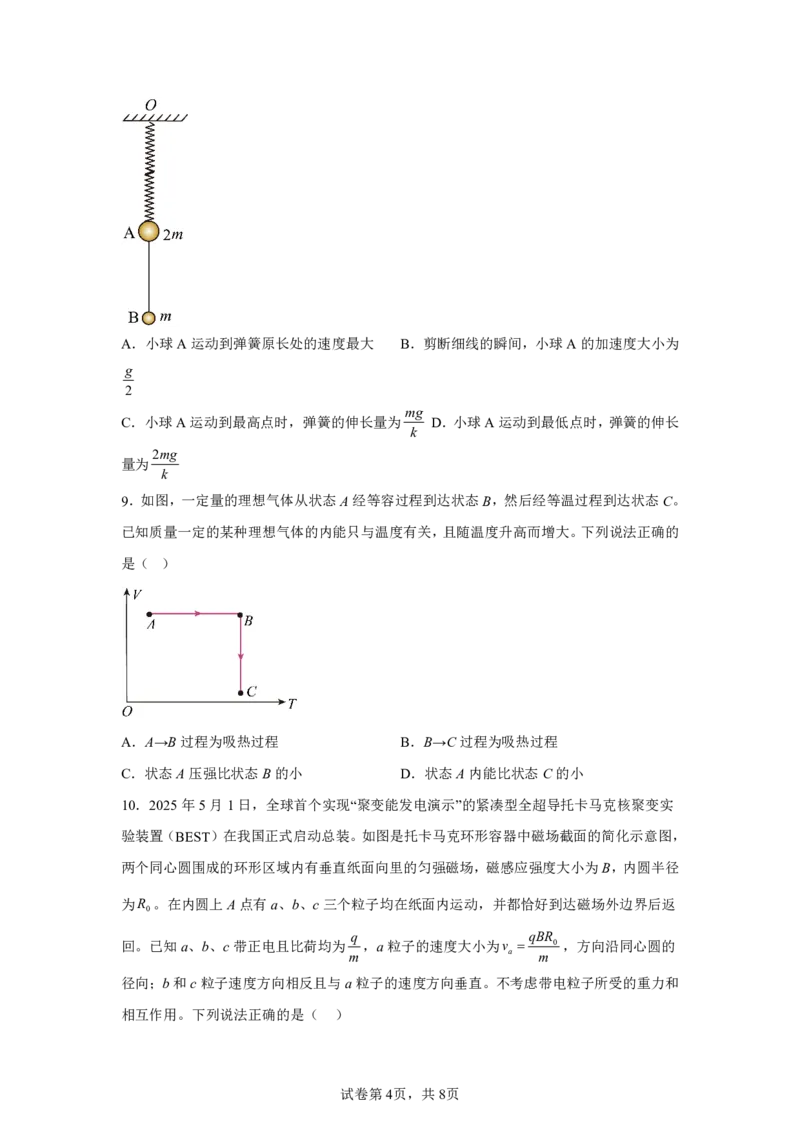
8.如图,轻质弹簧上端固定,下端悬挂质量为2m的小球A,质量为m的小球B与A用细
线相连,整个系统处于静止状态。弹簧劲度系数为k,重力加速度为g。现剪断细线,下列
说法正确的是( )
试卷第3页,共8页A.小球A运动到弹簧原长处的速度最大 B.剪断细线的瞬间,小球A的加速度大小为
g
2
mg
C.小球A运动到最高点时,弹簧的伸长量为 D.小球A运动到最低点时,弹簧的伸长
k
2mg
量为
k
9.如图,一定量的理想气体从状态A经等容过程到达状态B,然后经等温过程到达状态C。
已知质量一定的某种理想气体的内能只与温度有关,且随温度升高而增大。下列说法正确的
是( )
A.A→B过程为吸热过程 B.B→C过程为吸热过程
C.状态A压强比状态B的小 D.状态A内能比状态C的小
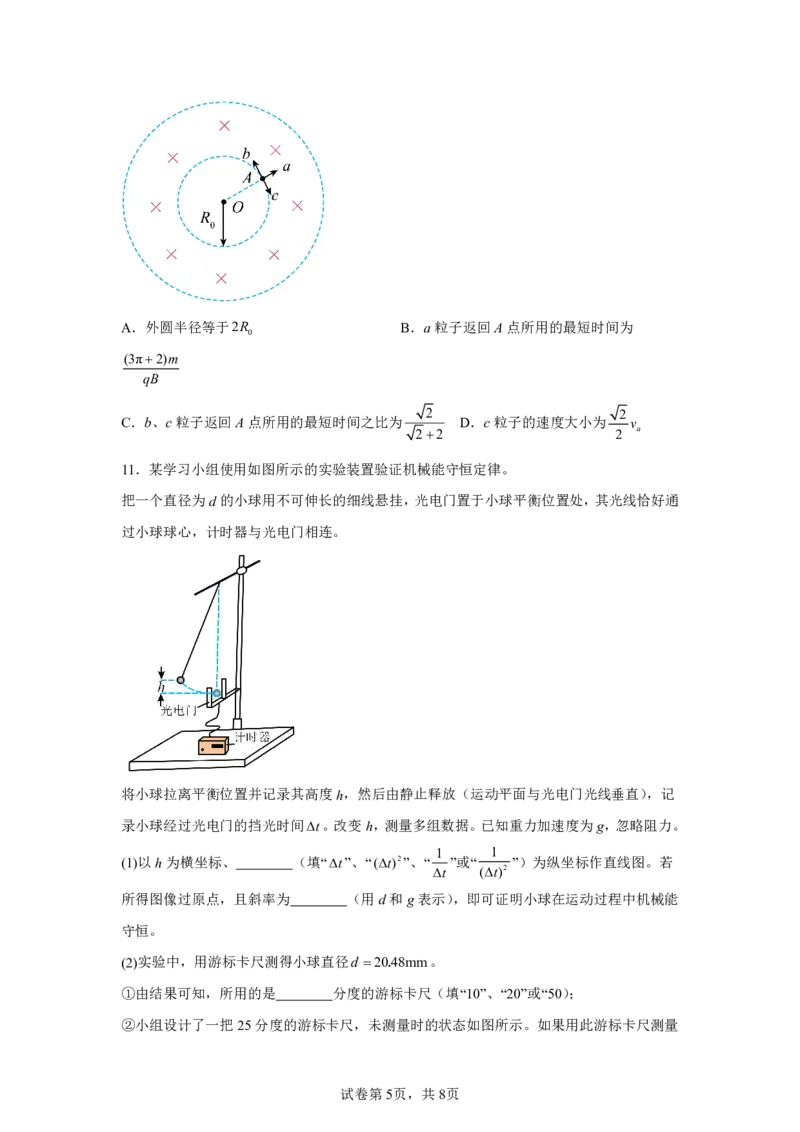
10.2025年5月1日,全球首个实现“聚变能发电演示”的紧凑型全超导托卡马克核聚变实
验装置(BEST)在我国正式启动总装。如图是托卡马克环形容器中磁场截面的简化示意图,
两个同心圆围成的环形区域内有垂直纸面向里的匀强磁场,磁感应强度大小为B,内圆半径
为R 。在内圆上A点有a、b、c三个粒子均在纸面内运动,并都恰好到达磁场外边界后返
0
q qBR
回。已知a、b、c带正电且比荷均为 ,a粒子的速度大小为v 0 ,方向沿同心圆的
m a m
径向;b和c粒子速度方向相反且与a粒子的速度方向垂直。不考虑带电粒子所受的重力和
相互作用。下列说法正确的是( )
试卷第4页,共8页A.外圆半径等于2R B.a粒子返回A点所用的最短时间为
0
(3π2)m
qB
2 2
C.b、c粒子返回A点所用的最短时间之比为 D.c粒子的速度大小为 v
22 2 a
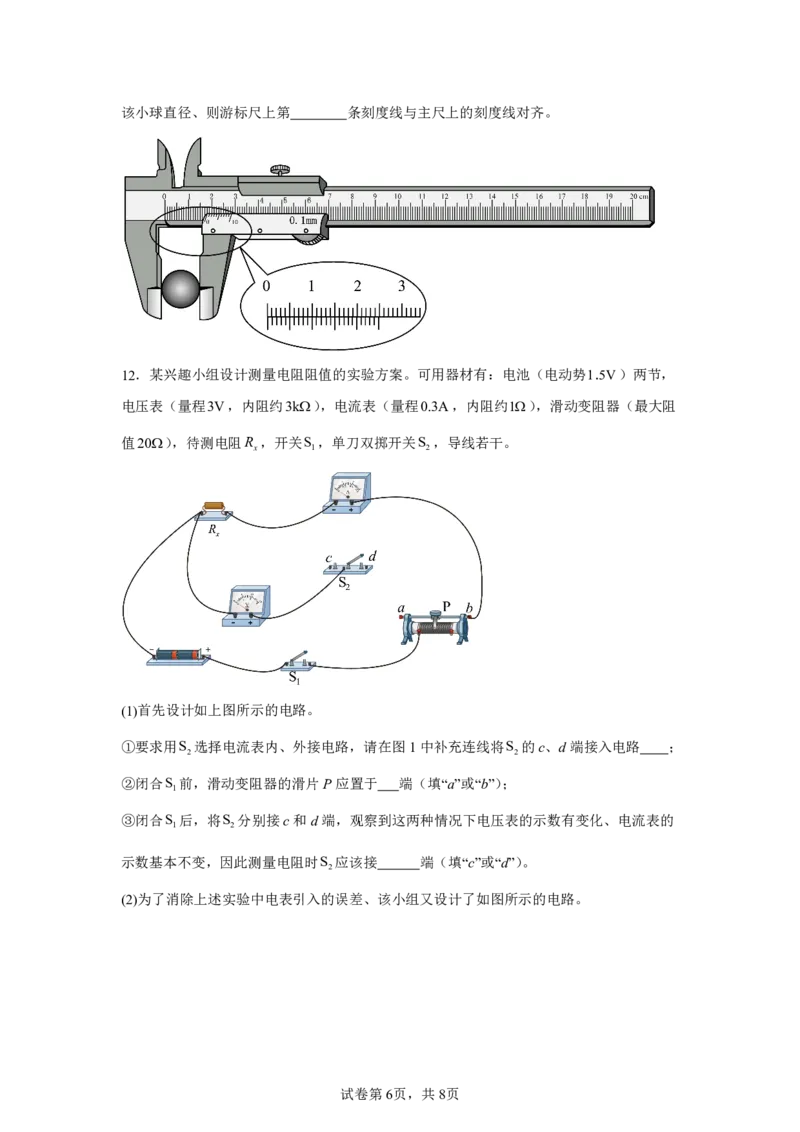
11.某学习小组使用如图所示的实验装置验证机械能守恒定律。
把一个直径为d的小球用不可伸长的细线悬挂,光电门置于小球平衡位置处,其光线恰好通
过小球球心,计时器与光电门相连。
将小球拉离平衡位置并记录其高度h,然后由静止释放(运动平面与光电门光线垂直),记
录小球经过光电门的挡光时间t。改变h,测量多组数据。已知重力加速度为g,忽略阻力。
1 1
(1)以h为横坐标、 (填“t”、“(t)2”、“ ”或“ ”)为纵坐标作直线图。若
t (t)2
所得图像过原点,且斜率为 (用d和g表示),即可证明小球在运动过程中机械能
守恒。
(2)实验中,用游标卡尺测得小球直径d 20.48mm。
①由结果可知,所用的是 分度的游标卡尺(填“10”、“20”或“50);
②小组设计了一把25分度的游标卡尺,未测量时的状态如图所示。如果用此游标卡尺测量
试卷第5页,共8页该小球直径、则游标尺上第 条刻度线与主尺上的刻度线对齐。
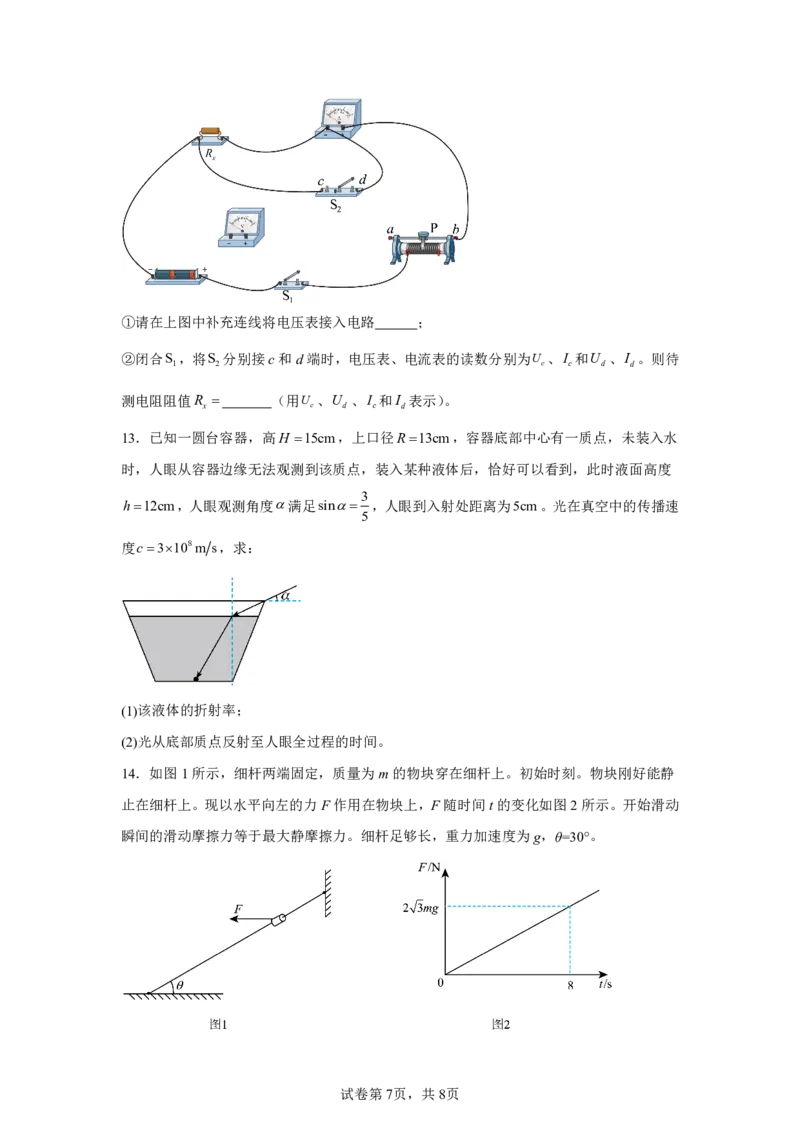
12.某兴趣小组设计测量电阻阻值的实验方案。可用器材有:电池(电动势1.5V)两节,
电压表(量程3V,内阻约3k),电流表(量程0.3A,内阻约1),滑动变阻器(最大阻
值20),待测电阻R ,开关S ,单刀双掷开关S ,导线若干。
x 1 2
(1)首先设计如上图所示的电路。
①要求用S 选择电流表内、外接电路,请在图1中补充连线将S 的c、d端接入电路 ;
2 2
②闭合S 前,滑动变阻器的滑片P应置于 端(填“a”或“b”);
1
③闭合S 后,将S 分别接c和d端,观察到这两种情况下电压表的示数有变化、电流表的
1 2
示数基本不变,因此测量电阻时S 应该接 端(填“c”或“d”)。
2
(2)为了消除上述实验中电表引入的误差、该小组又设计了如图所示的电路。
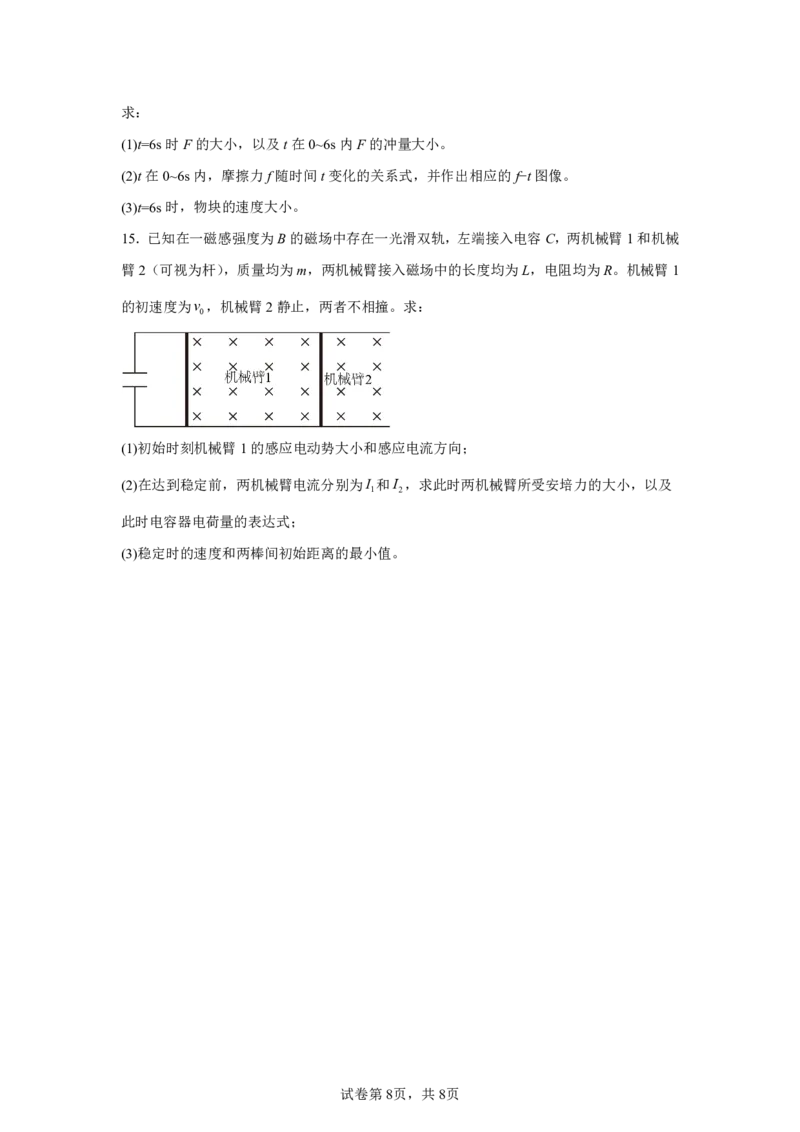
试卷第6页,共8页①请在上图中补充连线将电压表接入电路 ;
②闭合S ,将S 分别接c和d端时,电压表、电流表的读数分别为U 、I 和U 、I 。则待
1 2 c c d d
测电阻阻值R (用U 、U 、I 和I 表示)。
x c d c d
13.已知一圆台容器,高H 15cm,上口径R13cm,容器底部中心有一质点,未装入水
时,人眼从容器边缘无法观测到该质点,装入某种液体后,恰好可以看到,此时液面高度
3
h12cm,人眼观测角度满足sin ,人眼到入射处距离为5cm。光在真空中的传播速
5
度c3108m s,求:
(1)该液体的折射率;
(2)光从底部质点反射至人眼全过程的时间。
14.如图1所示,细杆两端固定,质量为m的物块穿在细杆上。初始时刻。物块刚好能静
止在细杆上。现以水平向左的力F作用在物块上,F随时间t的变化如图2所示。开始滑动
瞬间的滑动摩擦力等于最大静摩擦力。细杆足够长,重力加速度为g,θ=30°。
试卷第7页,共8页求:
(1)t=6s时F的大小,以及t在0~6s内F的冲量大小。
(2)t在0~6s内,摩擦力f随时间t变化的关系式,并作出相应的f−t图像。
(3)t=6s时,物块的速度大小。
15.已知在一磁感强度为B的磁场中存在一光滑双轨,左端接入电容C,两机械臂1和机械
臂2(可视为杆),质量均为m,两机械臂接入磁场中的长度均为L,电阻均为R。机械臂1
的初速度为v ,机械臂2静止,两者不相撞。求:
0
(1)初始时刻机械臂1的感应电动势大小和感应电流方向;
(2)在达到稳定前,两机械臂电流分别为I 和I ,求此时两机械臂所受安培力的大小,以及
1 2
此时电容器电荷量的表达式;
(3)稳定时的速度和两棒间初始距离的最小值。
试卷第8页,共8页1.C
【详解】根据题意可知,用能量为50eV的电子碰撞He+离子,可使He+离子跃迁到n3能
c
级和n2能级,由E E E hh
m n
可知,波长最长的谱线对应的跃迁为n3n2能级。
故选C。
2.A
GMm v2
【详解】A.根据题意,由万有引力提供向心力有 m
R2 R
GM
解得v
R
GM
可知,若v ,小星球做匀速圆周运动,故A正确;
R
GM 2GM
B.结合A分析可知,若 v ,万有引力不足以提供小星球做匀速圆周运动
R R
所需要的向心力,小星球做离心运动,但又不能脱离恒星的引力范围,所以小星球做椭圆运
动,而不是抛物线运动,故B错误;
2GM
C.若v ,这是小星球脱离恒星引力束缚的临界速度,小星球将做抛物线运动,而
R
不是椭圆运动,故C错误;
2GM
D.若v ,小星球将脱离恒星引力束缚,做双曲线运动,不可能与恒星相撞,故D
R
错误。
故选A。
3.A
【详解】根据题意,由牛顿第二定律有Fmg ma
61065106
代入数据解得a m s2 2m s2
5105
故选A。
4.B
【详解】根据题意可知,小球A和B碰撞过程中,水平方向上动量守恒,竖直方向上A球
的竖直速度不变,设碰撞后A球水平速度为v ,B球水平速度为v ,则有mvmv mv
1 2 1 2
1 1 1 1 1
碰撞为完全弹性碰撞,则由能量守恒定律有 mv2 mv2 mv2 mv2 mv2
2 2 A 2 A 2 1 2 2
联立解得v v,v 0
1 2
答案第1页,共9页1
小球A在竖直方向上做匀加速直线运动,则有h gt2
2
解得t2s
可知,碰撞后,小球A运动t1s落地,则水平方向上有xvt
解得v3.0m s
故选B。
5.D
【详解】A.MN两点电势相等,电场线由上到下,NP在同一电场线上,沿电场线电势逐渐
降低,可知N点电势高于P点,可知M点电势高于P点,选项A错误;
B.M点电场线分布比N点密集,可知M点电场强度比N点大,选项B错误;
CD.负电荷从M点运动到P点,电势能增加,则电场力做负功,动能减小,速度减小,选
项C错误,D正确;
故选D。
6.C
T
【详解】A.在0 时间内,磁感应强度B增加,根据BS则磁通量增加,但是图像
4
B
的斜率减小,即磁感应强度B的变化率逐渐减小,根据法拉第电磁感应定律可知E S,
t
感应电动势E逐渐减小,选项A错误;
T 3T
B.当t 和t 时,因B-t图像的斜率大小相等,符号相反,可知感应电动势E大小相
8 8
等,方向相反,选项B错误;
T
C.t 时,B最大,则磁通量最大,但是B的变化率为零,则感应电动势E为零,选
4
项C正确;
T
D .t 时,B为零,则磁通量为零,但是B的变化率最大,则感应电动势E最大,选
2
项D错误。
故选C。
7.B
1
【详解】A.粒子在加速电场中被加速时U q mv2
1 2 0
d 1 U q
在偏转电场中做类平抛运动,则lv t m t2
0
2 2 dm
答案第2页,共9页2d2
解得U U
m l2 1
选项A错误;
d l
2 2
B.当U U 时粒子从板的边缘射出,恰能打到样品边缘时,则
2 m a l
L
2 2
adl
解得L
2d
选项B正确;
1 U q U l2
C.根据y m t2 m
2 dm 4dU
1
若其它条件不变,要增加样品的辐照范围,则需减小U ,选项C错误;
1
D .由图可知t 时刻所加的向上电场电压小于t 时刻所加的向下的电场的电压,则t 时刻
1 2 1
射入的粒子打到A点时的竖直位移小于打到B点时的竖直位移,则选项D错误。
故选B。
8.BC
【详解】A.剪断细线后,弹力大于A的重力,则A先向上做加速运动,随弹力的减小,
则向上的加速度减小,当加速度为零时速度最大,此时弹力等于重力,弹簧处于拉伸状态,
选项A错误;
B.剪断细线之前则F 3mg
弹
剪断细线瞬间弹簧弹力不变,则对A由牛顿第二定律F 2mg 2ma
弹
g
解得A的加速度a
2
选项B正确;
3mg
C.剪断细线之前弹簧伸长量x
1 k
2mg
剪断细线后A做简谐振动,在平衡位置时弹簧伸长量x
2 k
mg
即振幅为Ax x
1 2 k
mg
由对称性可知小球A运动到最高点时,弹簧伸长量为 ,选项C正确;
k
3mg
D.由上述分析可知,小球A运动到最低点时,弹簧伸长量为 ,选项D错误。
k
故选BC。
答案第3页,共9页9.ACD
【详解】A.A→B过程,体积不变,则W=0,温度升高,则∆U>0,根据热力学第一定律∆U=W+Q
可知Q>0,即该过程吸热,选项A正确;
B .B→C过程,温度不变,则∆U=0,体积减小,则W>0,根据热力学第一定律∆U=W+Q
可知Q<0,即该过程为放热过程,选项B错误;
pV
C .A→B过程,体积不变,温度升高,根据 C
T
可知,压强变大,即状态A压强比状态B压强小,选项C正确;
D.状态A的温度低于状态C的温度,可知状态A的内能比状态C的小,选项D正确。
故选ACD。
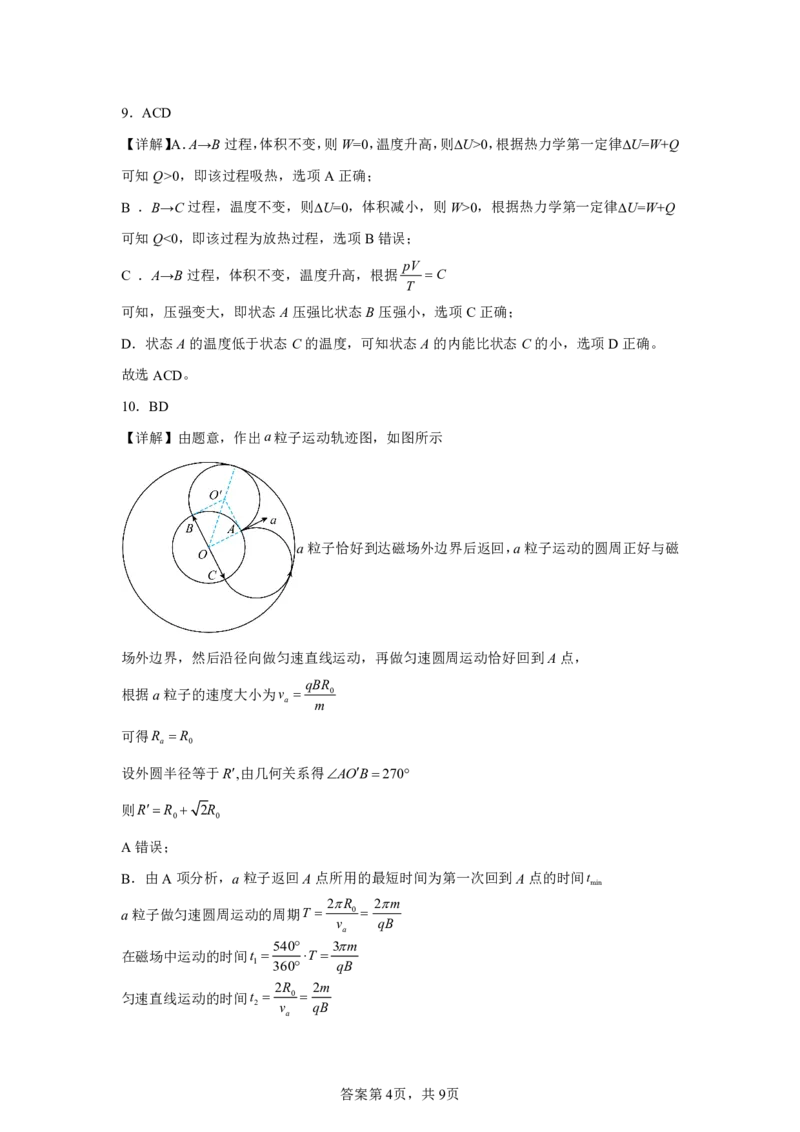
10.BD
【详解】由题意,作出a粒子运动轨迹图,如图所示
a粒子恰好到达磁场外边界后返回,a粒子运动的圆周正好与磁
场外边界,然后沿径向做匀速直线运动,再做匀速圆周运动恰好回到A点,
qBR
根据a粒子的速度大小为v 0
a m
可得R R
a 0
设外圆半径等于R,由几何关系得AOB270
则RR 2R
0 0
A错误;
B.由A项分析,a粒子返回A点所用的最短时间为第一次回到A点的时间t
min
2R 2m
a粒子做匀速圆周运动的周期T 0
v qB
a
540 3m
在磁场中运动的时间t T
1 360 qB
2R 2m
匀速直线运动的时间t 0
2 v qB
a
答案第4页,共9页(3π2)m
故a粒子返回A点所用的最短时间为t t t
min 1 2 qB
B正确;
C.由题意,作出b、c粒子运动轨迹图,如图所示
q
因为b、c粒子返回A点都是运动一个圆周,根据b、c带正电且比荷均为 ,所以两粒子
m
做圆周运动周期相同,故所用的最短时间之比为1:1,C错误;
D.由几何关系得2R 2R
c 0
mv2
洛伦兹力提供向心力有qv B c
c R
c
2
联立解得v v
c 2 a
D正确。
故选BD。
1 2g
11.(1)
(t)2 d2
(2) 50 12
d
【详解】(1)[1][2]小球经过光电门的挡光时间t,可得小球到达平衡位置v
t
1
为验证机械能守恒定律,此过程中重力势能转化为动能有mgh mv2
2
1 2g
联立解得 h
(t)2 d2
1
可得纵坐标为
(t)2
2g
图像的斜率为k 。
d2
(2)[1]10分度、20分度、50分度的游标卡尺的精确度分别为0.1mm、0.05mm、0.02mm
此游标卡尺测得小球直径d 20.48mm
可以判断所用的是50分度的游标卡尺。
答案第5页,共9页[2]若为25分度的游标卡尺,其精确度为0.04mm,用此游标卡尺测量该小球直径,可得
0.48
n 12
0.04
则游标尺上第12条刻度线与主尺上的刻度线对齐。
12.(1) 见解析实物连接图 b c
Uc U
(2) 见解析实物连接图 d
I I
c d
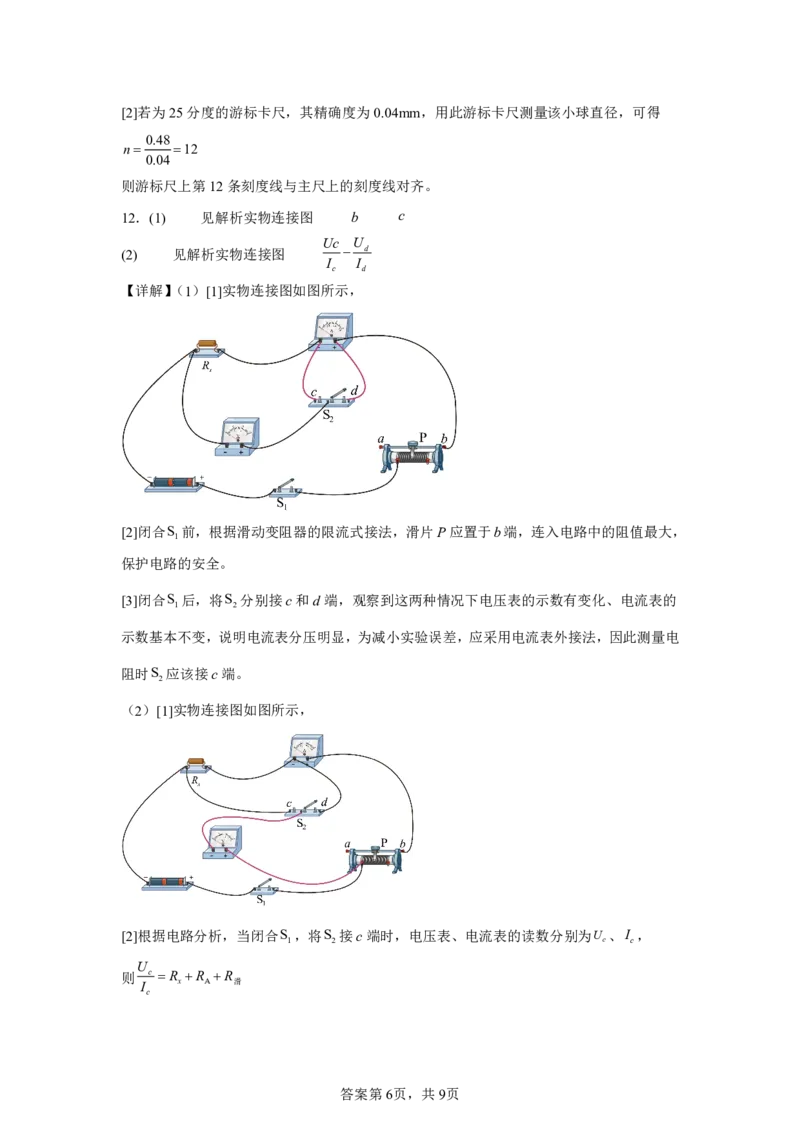
【详解】(1)[1]实物连接图如图所示,
[2]闭合S 前,根据滑动变阻器的限流式接法,滑片P应置于b端,连入电路中的阻值最大,
1
保护电路的安全。
[3]闭合S 后,将S 分别接c和d端,观察到这两种情况下电压表的示数有变化、电流表的
1 2
示数基本不变,说明电流表分压明显,为减小实验误差,应采用电流表外接法,因此测量电
阻时S 应该接c端。
2
(2)[1]实物连接图如图所示,
[2]根据电路分析,当闭合S ,将S 接c端时,电压表、电流表的读数分别为U 、I ,
1 2 c c
U
则 c R R R
I x A 滑
c
答案第6页,共9页U
将S 接d端时,电压表、电流表的读数分别为U 、I ,则 d R R
2 d d I A 滑
d
U U
那么待测电阻阻值R c d 。
x I I
c d
4
13.(1)
3
(2)1109s
【详解】(1)根据题意,画出光路图,如图所示
4
由几何关系可得sini ,OBH h3cm
5
则有OA4cm,AB5cm
OC ROA 3
sinr
则
OB h2ROA2 5
sini 4
由折射定律可得该液体的折射率为n
sinr 3
(2)根据题意,由图可知,光在空气中传播的距离为s 10cm
1
光在液体中的传播距离为s OB h2ROA2 15cm
2
c 3c
光在液体中的传播速度为v
n 4
s s 0.1 0.15
则光从底部质点反射至人眼全过程的时间t 1 2 s s 1109s
c v 3108 2.25108
3 3mg 9 3mg
14.(1)F ,
2 2
(2)见解析
11
(3)v g
2
3mg
【详解】(1)由图2可知F随时间线性变化,根据数学知识可知F t
4
3 3mg
所以当t=6s时,F
2
1 3 3 9 3
0~6s内F的冲量为F−t图围成的面积,即I mg6 mg
2 2 2
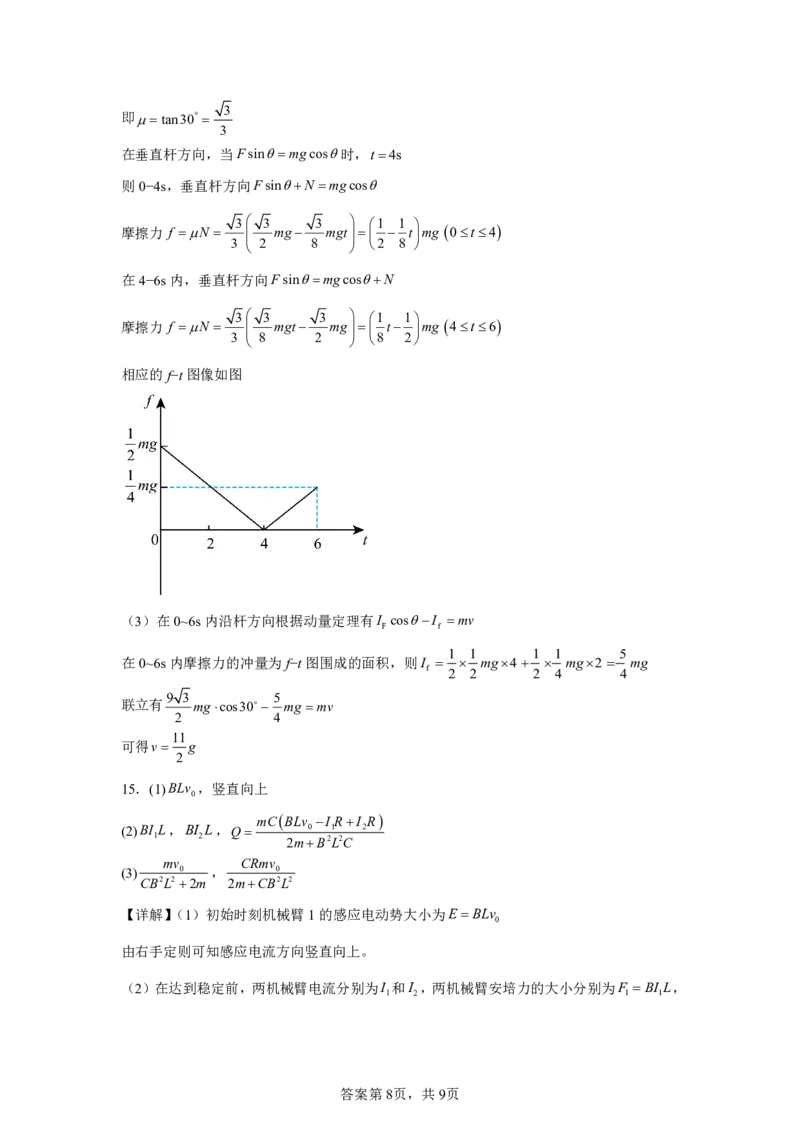
(2)由于初始时刻。物块刚好能静止在细杆上,则有mgsin30 mgcos30
答案第7页,共9页3
即tan30
3
在垂直杆方向,当Fsinmgcos时,t4s
则0−4s,垂直杆方向FsinN mgcos
3 3 3 1 1
摩擦力 f N
mg mgt
tmg 0t4
3 2 8 2 8
在4−6s内,垂直杆方向FsinmgcosN
3 3 3 1 1
摩擦力 f N
mgt mg
t mg 4t6
3 8 2 8 2
相应的f−t图像如图
(3)在0~6s内沿杆方向根据动量定理有I cosI mv
F f
1 1 1 1 5
在0~6s内摩擦力的冲量为f−t图围成的面积,则I mg4 mg2 mg
f 2 2 2 4 4
9 3 5
联立有 mgcos30 mg mv
2 4
11
可得v g
2
15.(1)BLv ,竖直向上
0
mCBLv I RI R
(2)BI L,BI L,Q 0 1 2
1 2 2mB2L2C
mv CRmv
(3) 0 , 0
CB2L2 2m 2mCB2L2
【详解】(1)初始时刻机械臂1的感应电动势大小为EBLv
0
由右手定则可知感应电流方向竖直向上。
(2)在达到稳定前,两机械臂电流分别为I 和I ,两机械臂安培力的大小分别为F BI L,
1 2 1 1
答案第8页,共9页F BI L
2 2
设此时两机械臂的速度分别为v 、v
1 2
根据动量守恒BI L·t mv mv ,BI L·t mv
1 1 0 2 2
而I·t Q ,I ·t Q
1 1 2 2
电容器的带电量QQ Q
1 2
Q
电容器两端的电压U BLv I RBLv I R
C 1 1 2 2
m(BLv I RI R)
联立解得U 0 1 2
2mB2L2C
mC(BLv I RI R)
所以此时电容器电荷量为QCU 0 1 2
2mB2L2C
(3)当I I 0时,两机械臂的速度相同,此时U BLv
1
mv
可得两机械臂的速度为v 0
2mB2L2C
B2L2v B2L2x
此过程中,对机械臂1,根据动量定理 ·Δt 1 mvmv
R R 0
B2L2v B2L2x
对机械臂2,根据动量定理 ·Δt 2 mv
R R
初始距离的最小值xx x
1 2
CRmv
解得Δx 0
2mB2L2C
答案第9页,共9页

