文档内容
专题强化练(一) 追及相遇问题 多过程问题
(40分钟 60分)
一、选择题
1.(6分)在平直公路上,自行车与同方向行驶的一辆汽车在t=0时同时经过某一个路标,它们的
位移随时间变化的规律为:汽车x=10t-t2,自行车x=5t,(x的单位为m,t的单位为s),则下列说法正
确的是( )
A.汽车做匀加速直线运动,自行车做匀速直线运动
B.经过路标后的较短时间内自行车在前,汽车在后
C.在t=2.5 s时,自行车和汽车相距最远
D.当两者再次同时经过同一位置时,它们距路标12.5 m
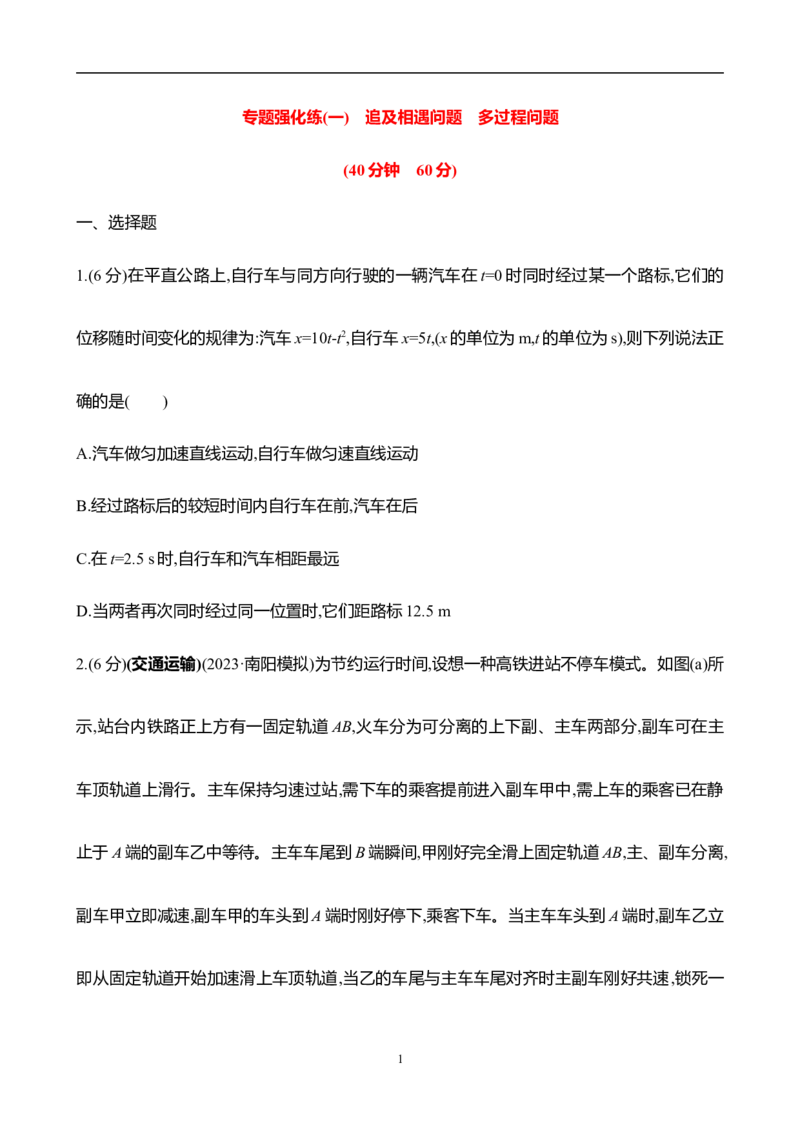
2.(6分)(交通运输)(2023·南阳模拟)为节约运行时间,设想一种高铁进站不停车模式。如图(a)所
示,站台内铁路正上方有一固定轨道AB,火车分为可分离的上下副、主车两部分,副车可在主
车顶轨道上滑行。主车保持匀速过站,需下车的乘客提前进入副车甲中,需上车的乘客已在静
止于A端的副车乙中等待。主车车尾到B端瞬间,甲刚好完全滑上固定轨道AB,主、副车分离,
副车甲立即减速,副车甲的车头到A端时刚好停下,乘客下车。当主车车头到A端时,副车乙立
即从固定轨道开始加速滑上车顶轨道,当乙的车尾与主车车尾对齐时主副车刚好共速,锁死一
1起前进。设火车以40 m/s速度匀速驶来,副车长均为20 m,副车甲、乙运动的v-t 图像如图(b)
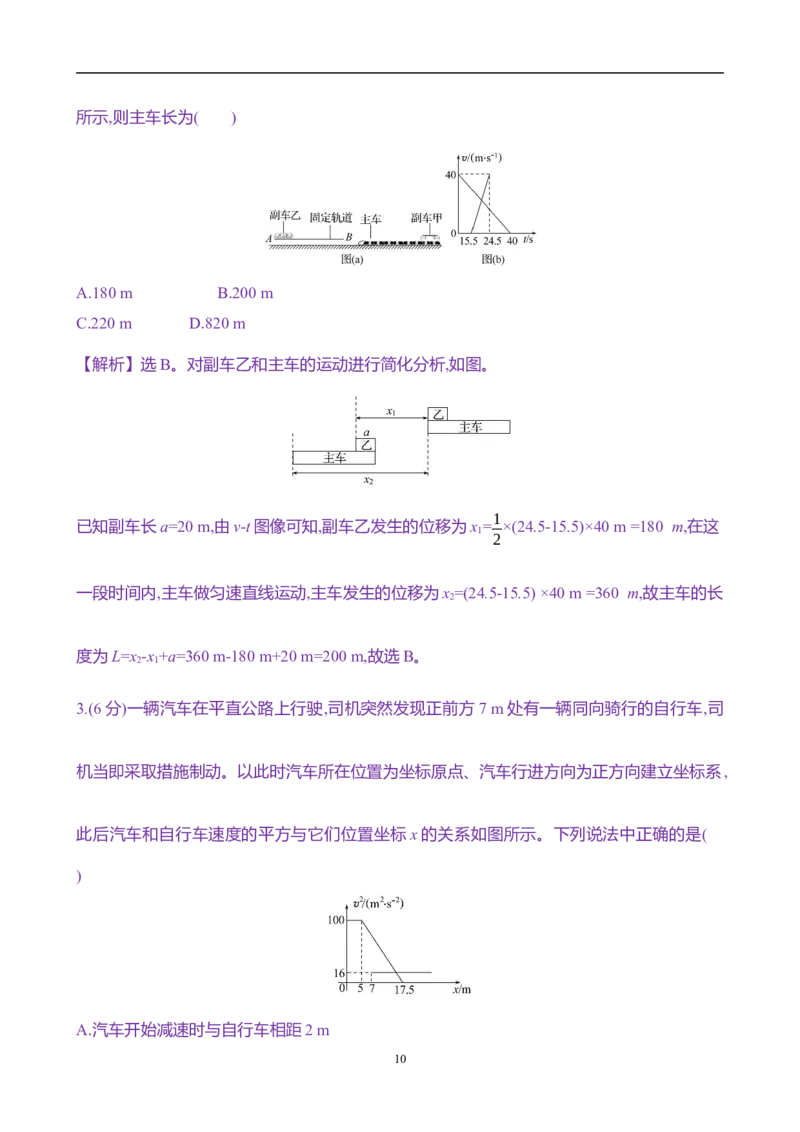
所示,则主车长为( )
A.180 m B.200 m
C.220 m D.820 m
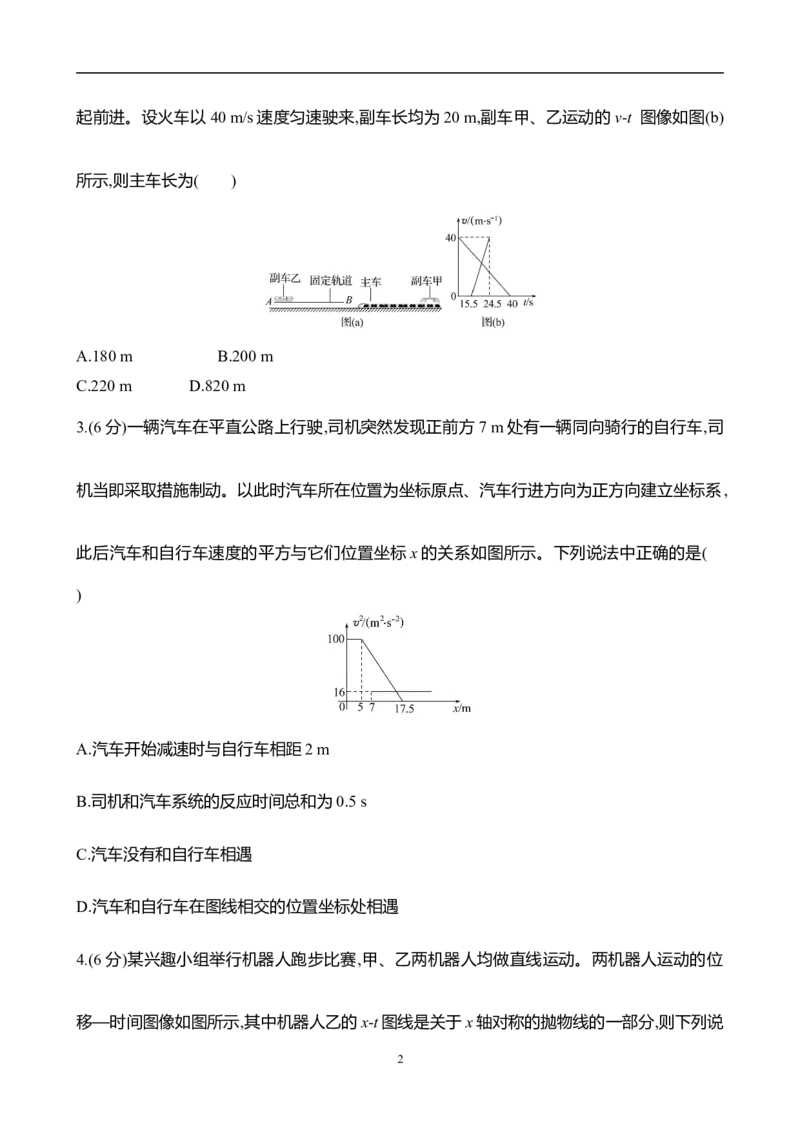
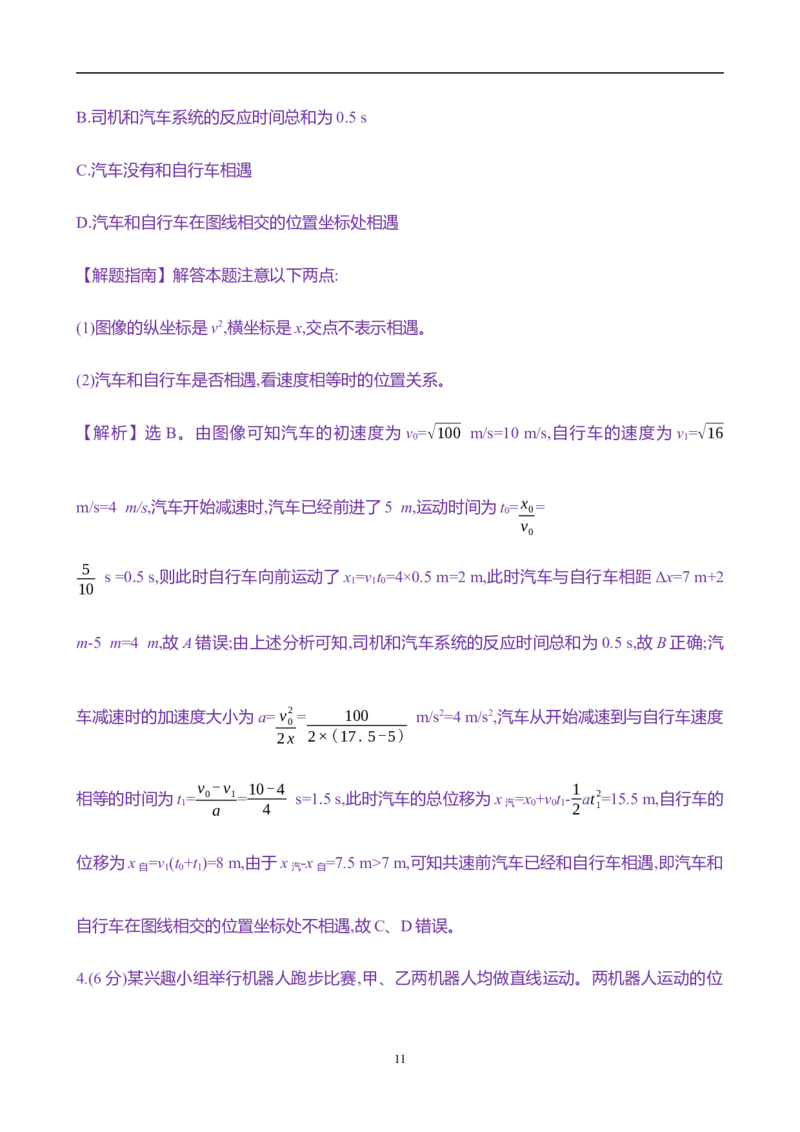
3.(6分)一辆汽车在平直公路上行驶,司机突然发现正前方7 m处有一辆同向骑行的自行车,司
机当即采取措施制动。以此时汽车所在位置为坐标原点、汽车行进方向为正方向建立坐标系,
此后汽车和自行车速度的平方与它们位置坐标 x的关系如图所示。下列说法中正确的是(
)
A.汽车开始减速时与自行车相距2 m
B.司机和汽车系统的反应时间总和为0.5 s
C.汽车没有和自行车相遇
D.汽车和自行车在图线相交的位置坐标处相遇
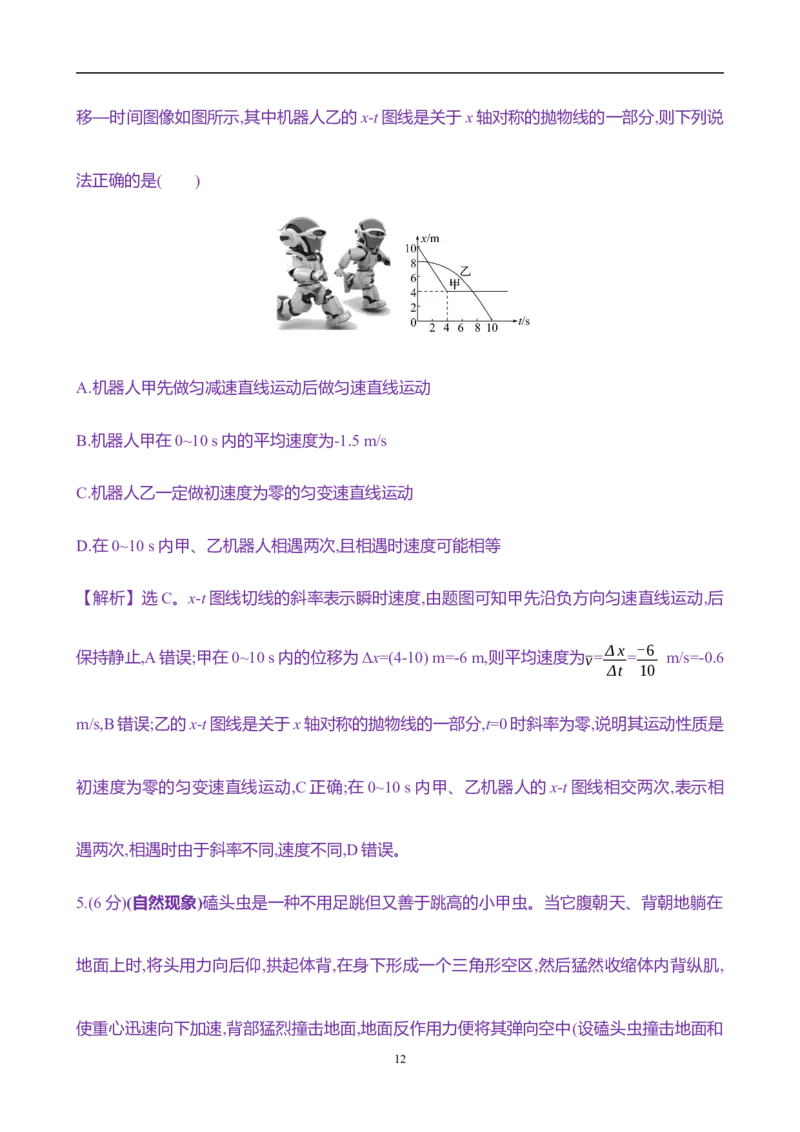
4.(6分)某兴趣小组举行机器人跑步比赛,甲、乙两机器人均做直线运动。两机器人运动的位
移—时间图像如图所示,其中机器人乙的x-t图线是关于x轴对称的抛物线的一部分,则下列说
2法正确的是( )
A.机器人甲先做匀减速直线运动后做匀速直线运动
B.机器人甲在0~10 s内的平均速度为-1.5 m/s
C.机器人乙一定做初速度为零的匀变速直线运动
D.在0~10 s内甲、乙机器人相遇两次,且相遇时速度可能相等
5.(6分)(自然现象)磕头虫是一种不用足跳但又善于跳高的小甲虫。当它腹朝天、背朝地躺在
地面上时,将头用力向后仰,拱起体背,在身下形成一个三角形空区,然后猛然收缩体内背纵肌,
使重心迅速向下加速,背部猛烈撞击地面,地面反作用力便将其弹向空中(设磕头虫撞击地面和
弹起的速率相等)。弹射录像显示,磕头虫拱背后重心向下加速(视为匀加速)的距离约为 0.8
mm,弹射最大高度约为24 cm。则它重心向下的加速度是重力加速度的( )
1 1
A.3 000倍 B.300倍 C. D.
300 30
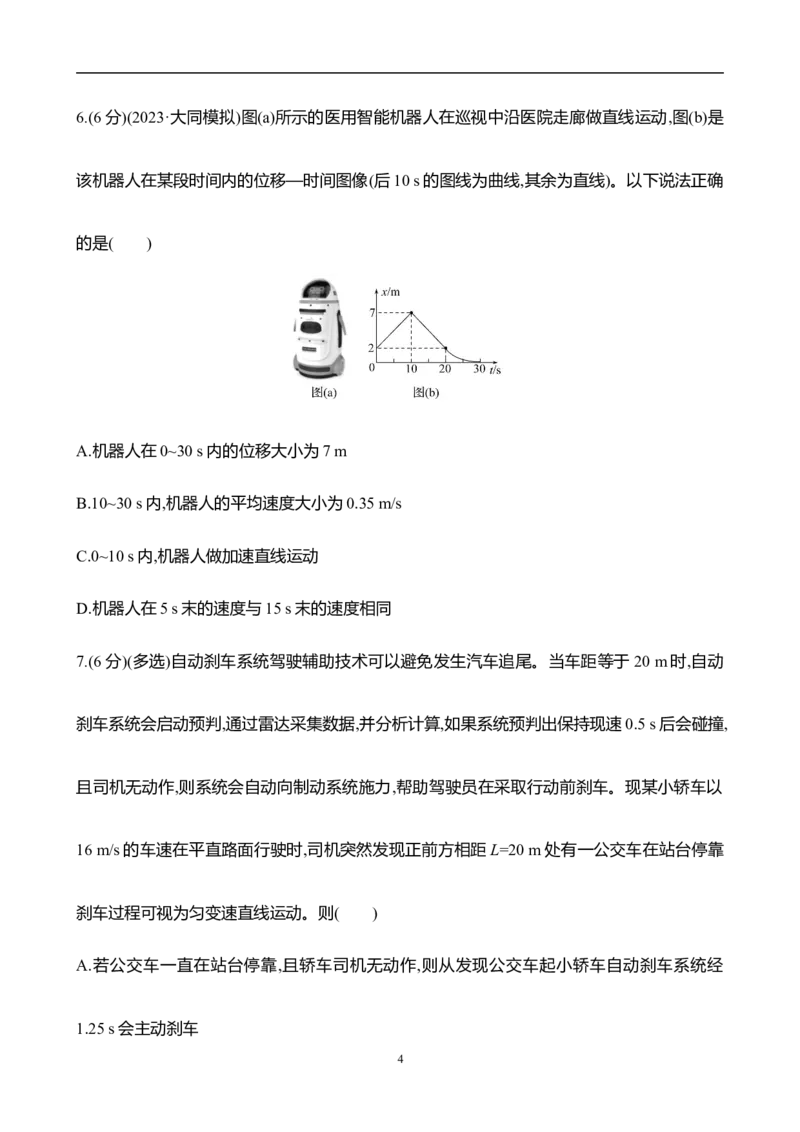
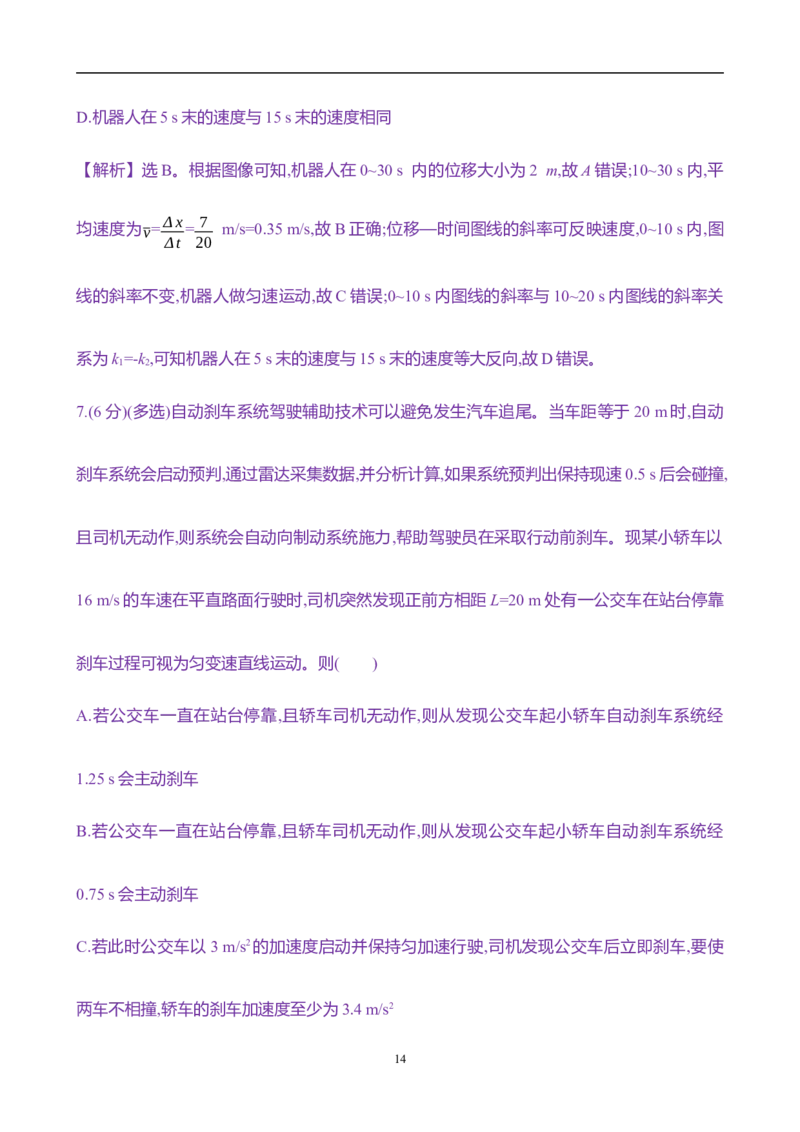
36.(6分)(2023·大同模拟)图(a)所示的医用智能机器人在巡视中沿医院走廊做直线运动,图(b)是
该机器人在某段时间内的位移—时间图像(后10 s的图线为曲线,其余为直线)。以下说法正确
的是( )
A.机器人在0~30 s内的位移大小为7 m
B.10~30 s内,机器人的平均速度大小为0.35 m/s
C.0~10 s内,机器人做加速直线运动
D.机器人在5 s末的速度与15 s末的速度相同
7.(6分)(多选)自动刹车系统驾驶辅助技术可以避免发生汽车追尾。当车距等于 20 m时,自动
刹车系统会启动预判,通过雷达采集数据,并分析计算,如果系统预判出保持现速0.5 s后会碰撞,
且司机无动作,则系统会自动向制动系统施力,帮助驾驶员在采取行动前刹车。现某小轿车以
16 m/s的车速在平直路面行驶时,司机突然发现正前方相距L=20 m处有一公交车在站台停靠
刹车过程可视为匀变速直线运动。则( )
A.若公交车一直在站台停靠,且轿车司机无动作,则从发现公交车起小轿车自动刹车系统经
1.25 s会主动刹车
4B.若公交车一直在站台停靠,且轿车司机无动作,则从发现公交车起小轿车自动刹车系统经
0.75 s会主动刹车
C.若此时公交车以3 m/s2的加速度启动并保持匀加速行驶,司机发现公交车后立即刹车,要使
两车不相撞,轿车的刹车加速度至少为3.4 m/s2
D.若此时公交车以3 m/s2的加速度启动并保持匀加速行驶,司机发现公交车后立即刹车,要使
两车不相撞,轿车的刹车加速度至少为9.4 m/s2
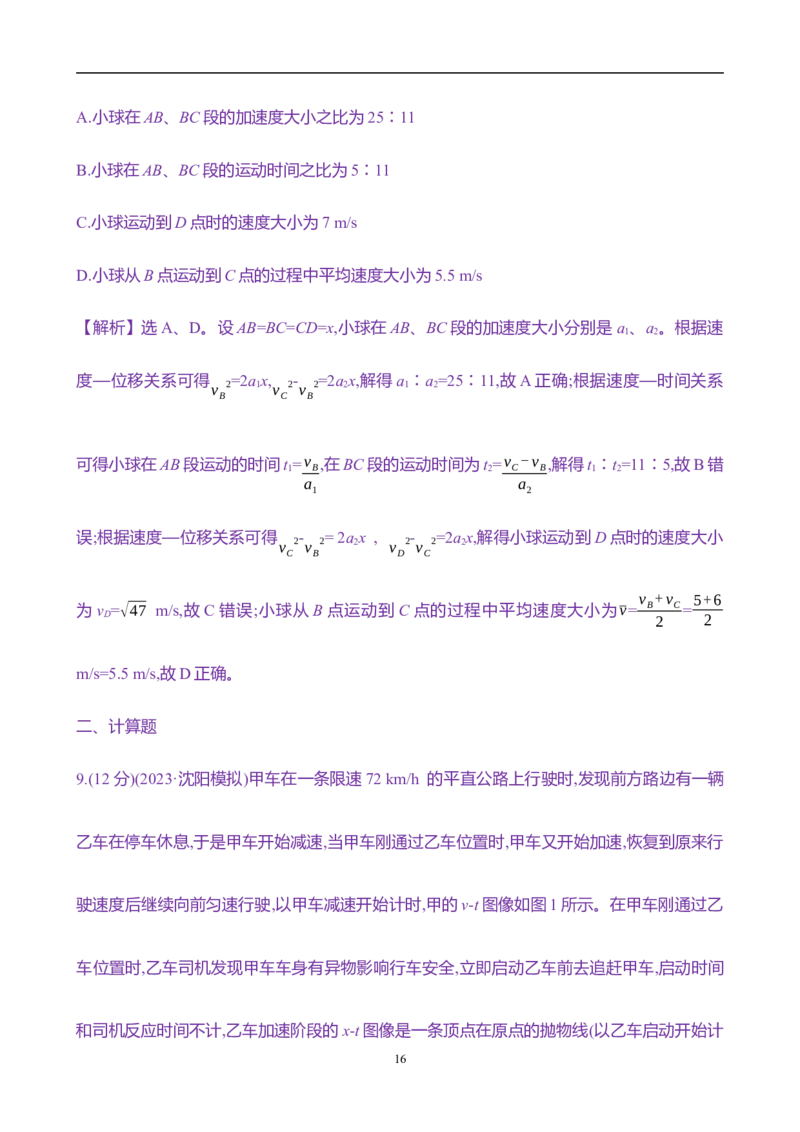
8.(6分)(多选)如图所示,两个光滑的斜面在 B处平滑连接,一个小球从A处由静止释放,经过
B、C两点时的速度大小分别为5 m/s和6 m/s,现测得长度AB=BC=CD。小球在斜面AB和斜
面BD上做加速度不同的匀加速直线运动,小球经过B点前、后的速度大小不变,下列说法正
确的是( )
A.小球在AB、BC段的加速度大小之比为25∶11
B.小球在AB、BC段的运动时间之比为5∶11
C.小球运动到D点时的速度大小为7 m/s
D.小球从B点运动到C点的过程中平均速度大小为5.5 m/s
二、计算题
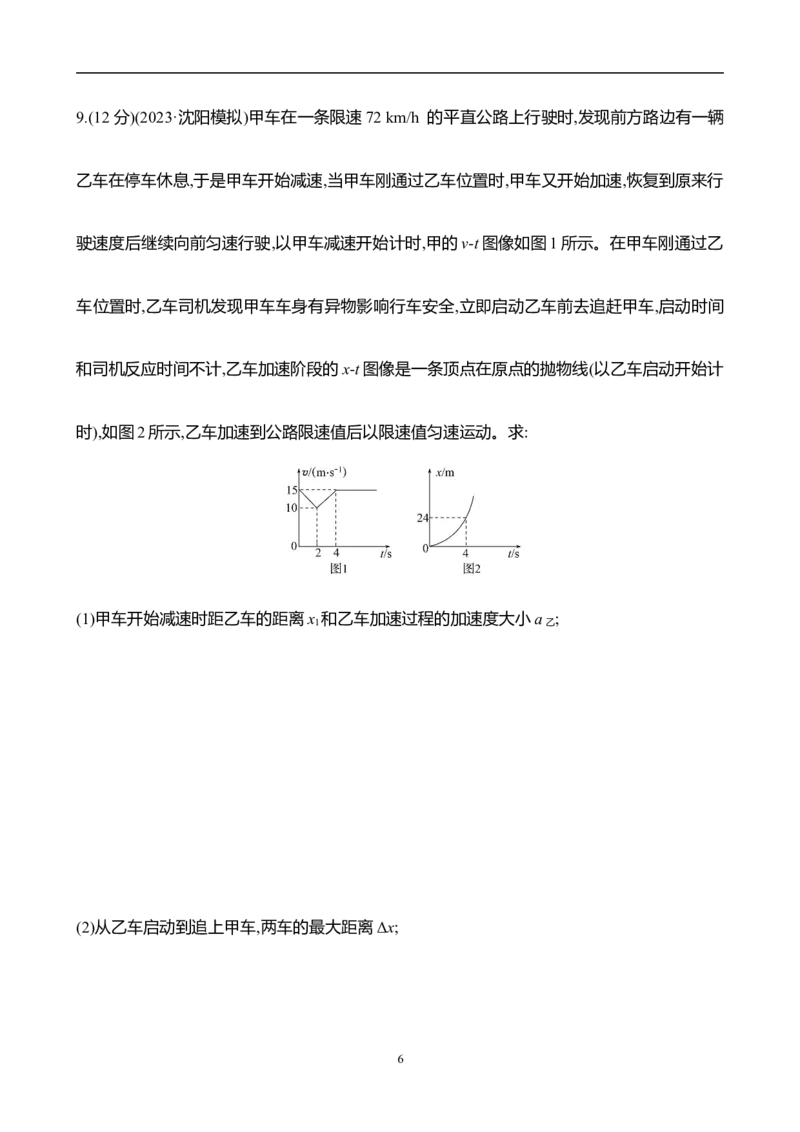
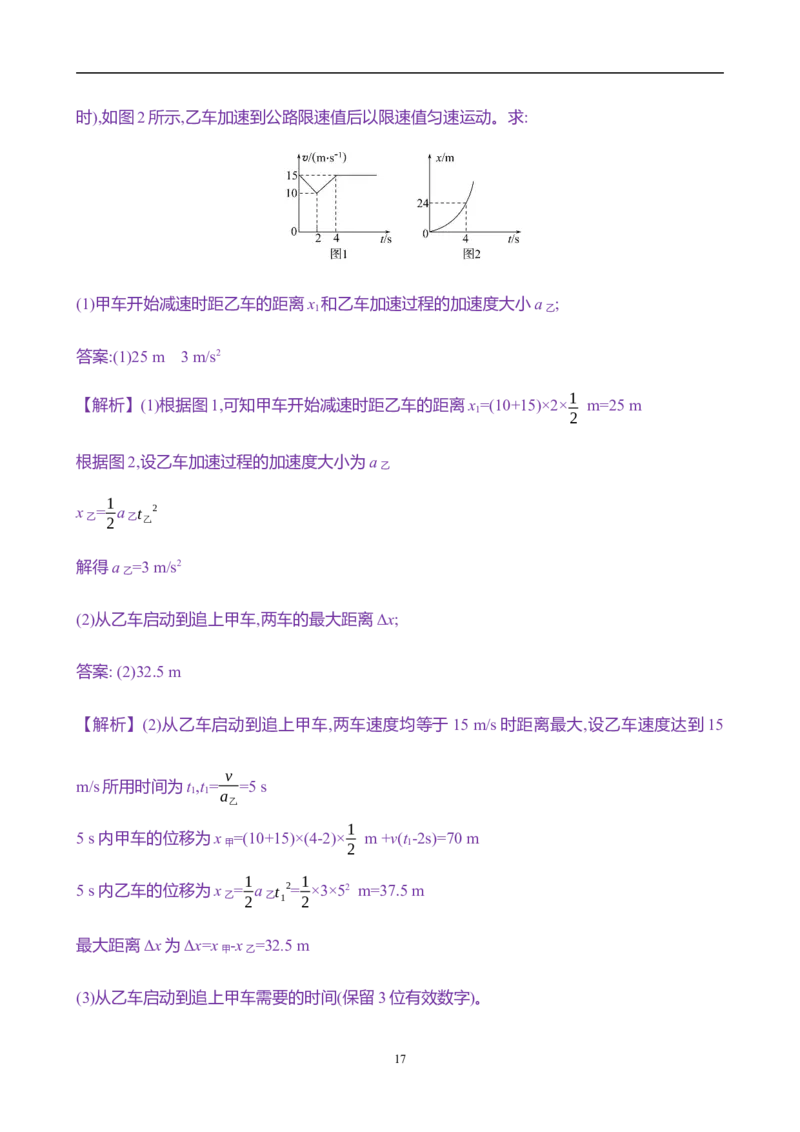
59.(12分)(2023·沈阳模拟)甲车在一条限速72 km/h 的平直公路上行驶时,发现前方路边有一辆
乙车在停车休息,于是甲车开始减速,当甲车刚通过乙车位置时,甲车又开始加速,恢复到原来行
驶速度后继续向前匀速行驶,以甲车减速开始计时,甲的v-t图像如图1所示。在甲车刚通过乙
车位置时,乙车司机发现甲车车身有异物影响行车安全,立即启动乙车前去追赶甲车,启动时间
和司机反应时间不计,乙车加速阶段的x-t图像是一条顶点在原点的抛物线(以乙车启动开始计
时),如图2所示,乙车加速到公路限速值后以限速值匀速运动。求:
(1)甲车开始减速时距乙车的距离x 和乙车加速过程的加速度大小a ;
1 乙
(2)从乙车启动到追上甲车,两车的最大距离Δx;
6(3)从乙车启动到追上甲车需要的时间(保留3位有效数字)。
【加固训练】
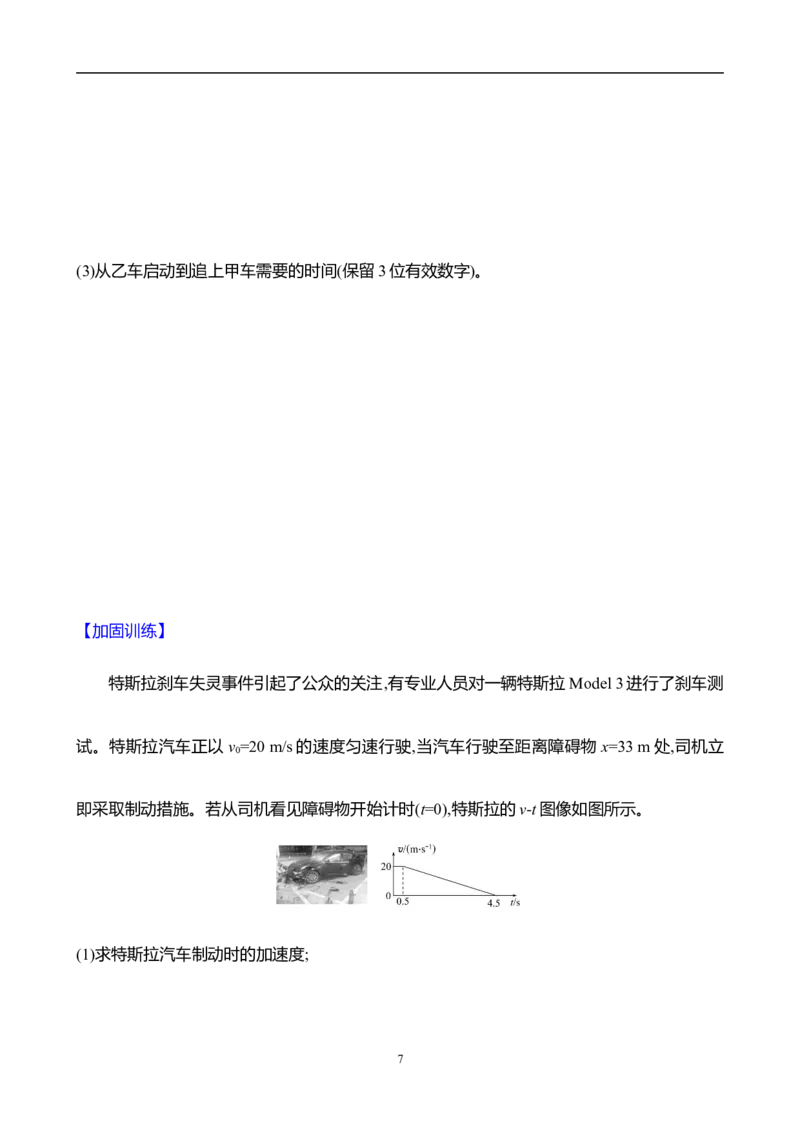
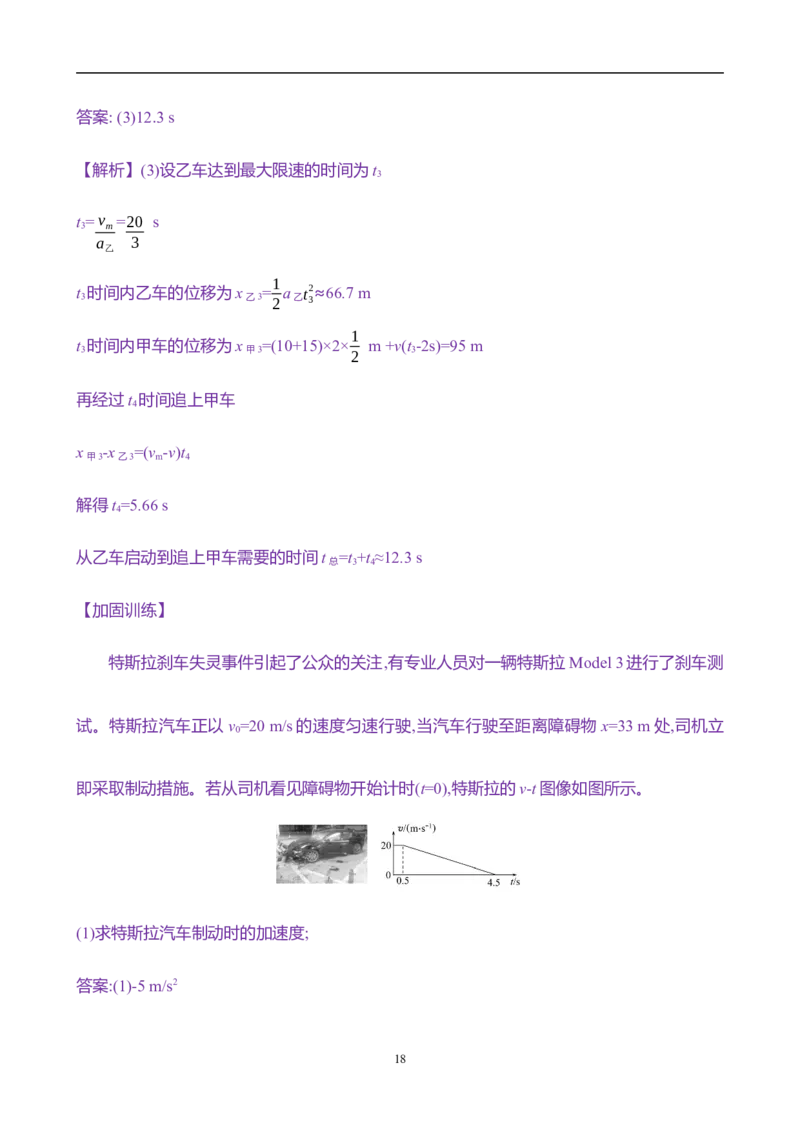
特斯拉刹车失灵事件引起了公众的关注,有专业人员对一辆特斯拉Model 3进行了刹车测
试。特斯拉汽车正以v =20 m/s的速度匀速行驶,当汽车行驶至距离障碍物x=33 m处,司机立
0
即采取制动措施。若从司机看见障碍物开始计时(t=0),特斯拉的v-t图像如图所示。
(1)求特斯拉汽车制动时的加速度;
7(2)求特斯拉司机从看到障碍物至汽车停止运动的这段时间内前进的距离和汽车停止运动前 1
s内前进的距离;
(3)若障碍物以v=4 m/s的速度与特斯拉汽车同向且同时(t=0)运动,障碍物会不会被撞?
解析版
一、选择题
1.(6分)在平直公路上,自行车与同方向行驶的一辆汽车在t=0时同时经过某一个路标,它们的
位移随时间变化的规律为:汽车x=10t-t2,自行车x=5t,(x的单位为m,t的单位为s),则下列说法正
8确的是( )
A.汽车做匀加速直线运动,自行车做匀速直线运动
B.经过路标后的较短时间内自行车在前,汽车在后
C.在t=2.5 s时,自行车和汽车相距最远
D.当两者再次同时经过同一位置时,它们距路标12.5 m
【解析】选C。由汽车和自行车位移随时间变化的规律知,汽车做匀减速运动,v =10 m/s,a=-2
0
m/s2,自行车做匀速直线运动,v=5 m/s,经过路标后的较短时间内,汽车速度较大,所以汽车在前,
故A、B错误;当汽车速度和自行车速度相等时,相距最远。根据v=v +at解得t=2.5 s,C正确;当
0
两车位移相等时再次经过同一位置,故10t'-t'2=5t',解得t'=5 s,x=25 m,故D错误。
2.(6分)(交通运输)(2023·南阳模拟)为节约运行时间,设想一种高铁进站不停车模式。如图(a)所
示,站台内铁路正上方有一固定轨道AB,火车分为可分离的上下副、主车两部分,副车可在主
车顶轨道上滑行。主车保持匀速过站,需下车的乘客提前进入副车甲中,需上车的乘客已在静
止于A端的副车乙中等待。主车车尾到B端瞬间,甲刚好完全滑上固定轨道AB,主、副车分离,
副车甲立即减速,副车甲的车头到A端时刚好停下,乘客下车。当主车车头到A端时,副车乙立
即从固定轨道开始加速滑上车顶轨道,当乙的车尾与主车车尾对齐时主副车刚好共速,锁死一
起前进。设火车以40 m/s速度匀速驶来,副车长均为20 m,副车甲、乙运动的v-t 图像如图(b)
9所示,则主车长为( )
A.180 m B.200 m
C.220 m D.820 m
【解析】选B。对副车乙和主车的运动进行简化分析,如图。
1
已知副车长a=20 m,由v-t图像可知,副车乙发生的位移为x = ×(24.5-15.5)×40 m =180 m,在这
1
2
一段时间内,主车做匀速直线运动,主车发生的位移为x =(24.5-15.5) ×40 m =360 m,故主车的长
2
度为L=x -x +a=360 m-180 m+20 m=200 m,故选B。
2 1
3.(6分)一辆汽车在平直公路上行驶,司机突然发现正前方7 m处有一辆同向骑行的自行车,司
机当即采取措施制动。以此时汽车所在位置为坐标原点、汽车行进方向为正方向建立坐标系,
此后汽车和自行车速度的平方与它们位置坐标 x的关系如图所示。下列说法中正确的是(
)
A.汽车开始减速时与自行车相距2 m
10B.司机和汽车系统的反应时间总和为0.5 s
C.汽车没有和自行车相遇
D.汽车和自行车在图线相交的位置坐标处相遇
【解题指南】解答本题注意以下两点:
(1)图像的纵坐标是v2,横坐标是x,交点不表示相遇。
(2)汽车和自行车是否相遇,看速度相等时的位置关系。
【解析】选 B。由图像可知汽车的初速度为 v =√100 m/s=10 m/s,自行车的速度为 v =√16
0 1
m/s=4 m/s,汽车开始减速时,汽车已经前进了5 m,运动时间为t =x =
0 0
v
0
5
s =0.5 s,则此时自行车向前运动了x =v t =4×0.5 m=2 m,此时汽车与自行车相距Δx=7 m+2
1 1 0
10
m-5 m=4 m,故A错误;由上述分析可知,司机和汽车系统的反应时间总和为 0.5 s,故B正确;汽
车减速时的加速度大小为a= v2 = 100 m/s2=4 m/s2,汽车从开始减速到与自行车速度
0
2x 2×(17.5-5)
v -v 10-4 1
相等的时间为t = 0 1= s=1.5 s,此时汽车的总位移为x =x +v t - at2=15.5 m,自行车的
1 a 4 汽 0 0 1 2 1
位移为x =v (t +t )=8 m,由于x -x =7.5 m>7 m,可知共速前汽车已经和自行车相遇,即汽车和
自 1 0 1 汽 自
自行车在图线相交的位置坐标处不相遇,故C、D错误。
4.(6分)某兴趣小组举行机器人跑步比赛,甲、乙两机器人均做直线运动。两机器人运动的位
11移—时间图像如图所示,其中机器人乙的x-t图线是关于x轴对称的抛物线的一部分,则下列说
法正确的是( )
A.机器人甲先做匀减速直线运动后做匀速直线运动
B.机器人甲在0~10 s内的平均速度为-1.5 m/s
C.机器人乙一定做初速度为零的匀变速直线运动
D.在0~10 s内甲、乙机器人相遇两次,且相遇时速度可能相等
【解析】选C。x-t图线切线的斜率表示瞬时速度,由题图可知甲先沿负方向匀速直线运动,后
Δx -6
保持静止,A错误;甲在0~10 s内的位移为Δx=(4-10) m=-6 m,则平均速度为v= = m/s=-0.6
Δt 10
m/s,B错误;乙的x-t图线是关于x轴对称的抛物线的一部分,t=0时斜率为零,说明其运动性质是
初速度为零的匀变速直线运动,C正确;在0~10 s内甲、乙机器人的x-t图线相交两次,表示相
遇两次,相遇时由于斜率不同,速度不同,D错误。
5.(6分)(自然现象)磕头虫是一种不用足跳但又善于跳高的小甲虫。当它腹朝天、背朝地躺在
地面上时,将头用力向后仰,拱起体背,在身下形成一个三角形空区,然后猛然收缩体内背纵肌,
使重心迅速向下加速,背部猛烈撞击地面,地面反作用力便将其弹向空中(设磕头虫撞击地面和
12弹起的速率相等)。弹射录像显示,磕头虫拱背后重心向下加速(视为匀加速)的距离约为 0.8
mm,弹射最大高度约为24 cm。则它重心向下的加速度是重力加速度的( )
1 1
A.3 000倍 B.300倍 C. D.
300 30
【解析】选 B。设磕头虫背部撞击地面的速度为 v,则根据题意有 =2as =2gs ,其中 s =0.8
t v2 1 2 1
t
mm=8×10-4 m,s =24 cm=2.4×10-1 m,由此可得a=s =2.4×10-1 =300,故选B。
2 2
g s 8×10-4
1
6.(6分)(2023·大同模拟)图(a)所示的医用智能机器人在巡视中沿医院走廊做直线运动,图(b)是
该机器人在某段时间内的位移—时间图像(后10 s的图线为曲线,其余为直线)。以下说法正确
的是( )
A.机器人在0~30 s内的位移大小为7 m
B.10~30 s内,机器人的平均速度大小为0.35 m/s
C.0~10 s内,机器人做加速直线运动
13D.机器人在5 s末的速度与15 s末的速度相同
【解析】选B。根据图像可知,机器人在0~30 s 内的位移大小为2 m,故A错误;10~30 s内,平
Δx 7
均速度为v= = m/s=0.35 m/s,故B正确;位移—时间图线的斜率可反映速度,0~10 s内,图
Δt 20
线的斜率不变,机器人做匀速运动,故C错误;0~10 s内图线的斜率与10~20 s内图线的斜率关
系为k =-k ,可知机器人在5 s末的速度与15 s末的速度等大反向,故D错误。
1 2
7.(6分)(多选)自动刹车系统驾驶辅助技术可以避免发生汽车追尾。当车距等于 20 m时,自动
刹车系统会启动预判,通过雷达采集数据,并分析计算,如果系统预判出保持现速0.5 s后会碰撞,
且司机无动作,则系统会自动向制动系统施力,帮助驾驶员在采取行动前刹车。现某小轿车以
16 m/s的车速在平直路面行驶时,司机突然发现正前方相距L=20 m处有一公交车在站台停靠
刹车过程可视为匀变速直线运动。则( )
A.若公交车一直在站台停靠,且轿车司机无动作,则从发现公交车起小轿车自动刹车系统经
1.25 s会主动刹车
B.若公交车一直在站台停靠,且轿车司机无动作,则从发现公交车起小轿车自动刹车系统经
0.75 s会主动刹车
C.若此时公交车以3 m/s2的加速度启动并保持匀加速行驶,司机发现公交车后立即刹车,要使
两车不相撞,轿车的刹车加速度至少为3.4 m/s2
14D.若此时公交车以3 m/s2的加速度启动并保持匀加速行驶,司机发现公交车后立即刹车,要使
两车不相撞,轿车的刹车加速度至少为9.4 m/s2
【解题指南】解答本题需要注意以下两点:
(1)系统预判的依据是时间t=0.5 s,不是距离L=20 m。
(2)若轿车与公交车恰好不相撞,则两车速度相等,两车恰好不相撞。
【解析】选B、C。若公交车一直在站台停靠,且轿车司机无动作,经过时间t会相撞,则L=vt,
L 20
代入数据解得t= = s=1.25 s,由于系统预判出保持现速0.5 s后会碰撞,且司机无动作,则小
v 16
轿车的自动刹车系统会立即主动刹车,所以从发现公交车起经过 t'=t-0.5 s=0.75 s,小轿车自动
刹车系统会主动刹车,故A错误,B正确;设轿车的刹车加速度至少为a ,经过t两车速度相等,两
2
1 1
车恰好不相撞,则有 v=v -a t=a t,根据位移—时间公式 s = a t2,s =v t- a t2,位移间关系为
轿 2 1 1 1 2 轿 2
2 2
s +20 m=s ,代入数据解得a =3.4 m/s2,故C正确,D错误。
1 2 2
8.(6分)(多选)如图所示,两个光滑的斜面在 B处平滑连接,一个小球从A处由静止释放,经过
B、C两点时的速度大小分别为5 m/s和6 m/s,现测得长度AB=BC=CD。小球在斜面AB和斜
面BD上做加速度不同的匀加速直线运动,小球经过B点前、后的速度大小不变,下列说法正
确的是( )
15A.小球在AB、BC段的加速度大小之比为25∶11
B.小球在AB、BC段的运动时间之比为5∶11
C.小球运动到D点时的速度大小为7 m/s
D.小球从B点运动到C点的过程中平均速度大小为5.5 m/s
【解析】选A、D。设AB=BC=CD=x,小球在AB、BC段的加速度大小分别是a 、a 。根据速
1 2
度—位移关系可得 =2a x, - =2a x,解得a ∶a =25∶11,故A正确;根据速度—时间关系
v 2 1 v 2 v 2 2 1 2
B C B
可得小球在AB段运动的时间t =v ,在BC段的运动时间为t =v -v ,解得t ∶t =11∶5,故B错
1 B 2 C B 1 2
a a
1 2
误;根据速度—位移关系可得 - = 2a x , - =2a x,解得小球运动到D点时的速度大小
v 2 v 2 2 v 2 v 2 2
C B D C
v +v 5+6
为 v =√47 m/s,故 C 错误;小球从 B 点运动到 C 点的过程中平均速度大小为v= B C=
D 2 2
m/s=5.5 m/s,故D正确。
二、计算题
9.(12分)(2023·沈阳模拟)甲车在一条限速72 km/h 的平直公路上行驶时,发现前方路边有一辆
乙车在停车休息,于是甲车开始减速,当甲车刚通过乙车位置时,甲车又开始加速,恢复到原来行
驶速度后继续向前匀速行驶,以甲车减速开始计时,甲的v-t图像如图1所示。在甲车刚通过乙
车位置时,乙车司机发现甲车车身有异物影响行车安全,立即启动乙车前去追赶甲车,启动时间
和司机反应时间不计,乙车加速阶段的x-t图像是一条顶点在原点的抛物线(以乙车启动开始计
16时),如图2所示,乙车加速到公路限速值后以限速值匀速运动。求:
(1)甲车开始减速时距乙车的距离x 和乙车加速过程的加速度大小a ;
1 乙
答案:(1)25 m 3 m/s2
1
【解析】(1)根据图1,可知甲车开始减速时距乙车的距离x =(10+15)×2× m=25 m
1
2
根据图2,设乙车加速过程的加速度大小为a
乙
1
x = a t 2
乙 2 乙 乙
解得a =3 m/s2
乙
(2)从乙车启动到追上甲车,两车的最大距离Δx;
答案: (2)32.5 m
【解析】(2)从乙车启动到追上甲车,两车速度均等于 15 m/s时距离最大,设乙车速度达到15
v
m/s所用时间为t ,t = =5 s
1 1 a
乙
1
5 s内甲车的位移为x =(10+15)×(4-2)× m +v(t -2s)=70 m
甲 2 1
1 1
5 s内乙车的位移为x = a t 2= ×3×52 m=37.5 m
乙 2 乙 1 2
最大距离Δx为Δx=x -x =32.5 m
甲 乙
(3)从乙车启动到追上甲车需要的时间(保留3位有效数字)。
17答案: (3)12.3 s
【解析】(3)设乙车达到最大限速的时间为t
3
t =v =20 s
3 m
a 3
乙
1
t 时间内乙车的位移为x = a t2≈66.7 m
3 乙3 2 乙 3
1
t 时间内甲车的位移为x =(10+15)×2× m +v(t -2s)=95 m
3 甲3
2
3
再经过t 时间追上甲车
4
x -x =(v -v)t
甲3 乙3 m 4
解得t =5.66 s
4
从乙车启动到追上甲车需要的时间t =t +t ≈12.3 s
总 3 4
【加固训练】
特斯拉刹车失灵事件引起了公众的关注,有专业人员对一辆特斯拉Model 3进行了刹车测
试。特斯拉汽车正以v =20 m/s的速度匀速行驶,当汽车行驶至距离障碍物x=33 m处,司机立
0
即采取制动措施。若从司机看见障碍物开始计时(t=0),特斯拉的v-t图像如图所示。
(1)求特斯拉汽车制动时的加速度;
答案:(1)-5 m/s2
18Δv 0-20
【解析】(1)由图像得特斯拉汽车制动时的加速度a= = m/s2=-5 m/s2
Δt 4.5-0.5
(2)求特斯拉司机从看到障碍物至汽车停止运动的这段时间内前进的距离和汽车停止运动前 1
s内前进的距离;
答案: (2)50 m 2.5 m
【解析】(2)根据速度—时间图线围成的面积知,特斯拉司机从看到障碍物至汽车停止运动的
1
这段时间内前进的距离x= ×(0.5+4.5)×20 m=50 m
2
逆向看汽车做初速度为零的匀加速运动,
1 1
汽车停止运动前1 s内前进的距离x'= at2= ×5×12 m=2.5 m
2 2
(3)若障碍物以v=4 m/s的速度与特斯拉汽车同向且同时(t=0)运动,障碍物会不会被撞?
答案: (3)会
v-v 4-20
【解析】(3)汽车减速到和障碍物速度相等的时间为t = 0= s=3.2 s
0 a -5
司机从看到障碍物到速度减为v=4 m/s所通过的位移为x =v t +v2-v 2=48.4 m
1 0 1 0
2a
而障碍物通过的位移为x =v(t +t )=4×(0.5+3.2) m =14.8 m
2 1 0
因为x >x +33 m
1 2
障碍物会被撞。
19

