
文档内容
第 35 讲 多体机械能守恒问题
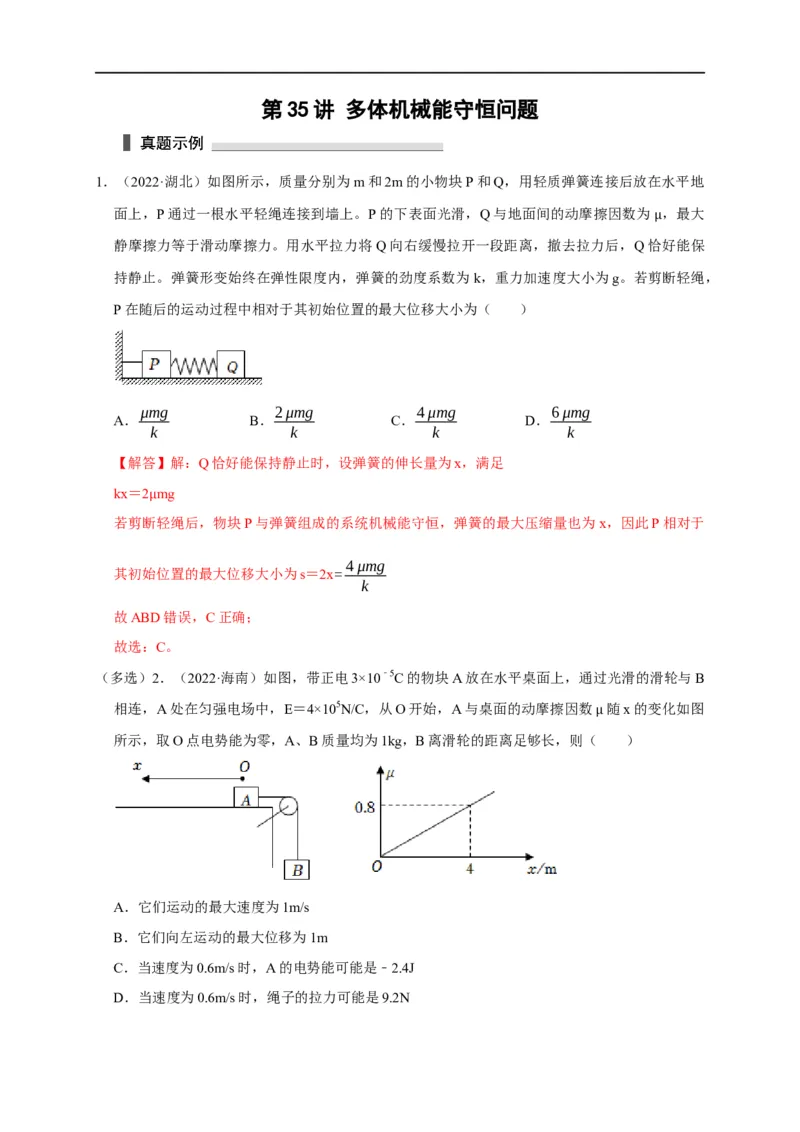
1.(2022·湖北)如图所示,质量分别为m和2m的小物块P和Q,用轻质弹簧连接后放在水平地
面上,P通过一根水平轻绳连接到墙上。P的下表面光滑,Q与地面间的动摩擦因数为 ,最大
静摩擦力等于滑动摩擦力。用水平拉力将Q向右缓慢拉开一段距离,撤去拉力后,Q恰μ好能保
持静止。弹簧形变始终在弹性限度内,弹簧的劲度系数为k,重力加速度大小为g。若剪断轻绳,
P在随后的运动过程中相对于其初始位置的最大位移大小为( )
μmg 2μmg 4μmg 6μmg
A. B. C. D.
k k k k
【解答】解:Q恰好能保持静止时,设弹簧的伸长量为x,满足
kx=2 mg
若剪断μ轻绳后,物块P与弹簧组成的系统机械能守恒,弹簧的最大压缩量也为x,因此P相对于
4μmg
其初始位置的最大位移大小为s=2x=
k
故ABD错误,C正确;
故选:C。
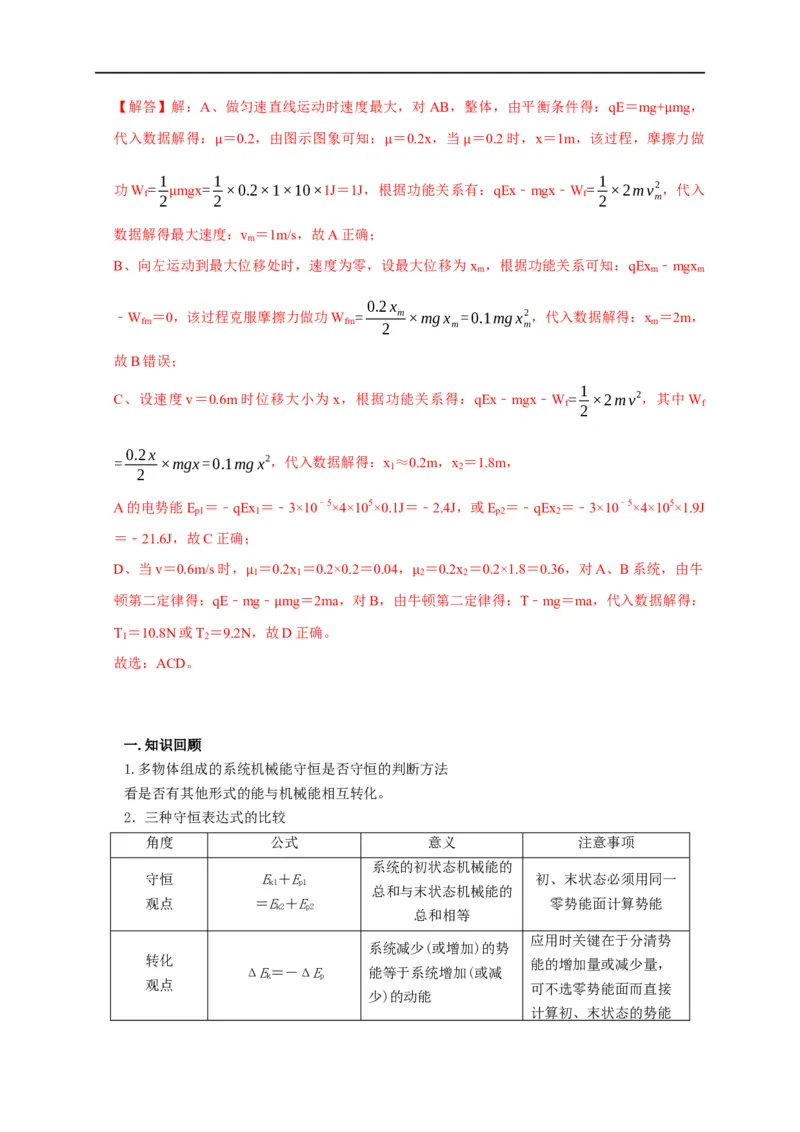
(多选)2.(2022·海南)如图,带正电3×10﹣5C的物块A放在水平桌面上,通过光滑的滑轮与B
相连,A处在匀强电场中,E=4×105N/C,从O开始,A与桌面的动摩擦因数 随x的变化如图
所示,取O点电势能为零,A、B质量均为1kg,B离滑轮的距离足够长,则(μ )
A.它们运动的最大速度为1m/s
B.它们向左运动的最大位移为1m
C.当速度为0.6m/s时,A的电势能可能是﹣2.4J
D.当速度为0.6m/s时,绳子的拉力可能是9.2N【解答】解:A、做匀速直线运动时速度最大,对AB,整体,由平衡条件得:qE=mg+ mg,
代入数据解得: =0.2,由图示图象可知: =0.2x,当 =0.2时,x=1m,该过程,摩擦μ力做
μ μ μ
1 1 1
功W= mgx= ×0.2×1×10×1J=1J,根据功能关系有:qEx﹣mgx﹣W= ×2mv2,代入
f 2 2 f 2 m
μ
数据解得最大速度:v =1m/s,故A正确;
m
B、向左运动到最大位移处时,速度为零,设最大位移为 x ,根据功能关系可知:qEx ﹣mgx
m m m
0.2x
﹣W =0,该过程克服摩擦力做功W = m×mgx =0.1mgx2,代入数据解得:x =2m,
fm fm 2 m m m
故B错误;
1
C、设速度v=0.6m时位移大小为x,根据功能关系得:qEx﹣mgx﹣W= ×2mv2,其中W
f f
2
0.2x
= ×mgx=0.1mgx2,代入数据解得:x ≈0.2m,x =1.8m,
1 2
2
A的电势能E =﹣qEx =﹣3×10﹣5×4×105×0.1J=﹣2.4J,或E =﹣qEx =﹣3×10﹣5×4×105×1.9J
p1 1 p2 2
=﹣21.6J,故C正确;
D、当v=0.6m/s时, =0.2x =0.2×0.2=0.04, =0.2x =0.2×1.8=0.36,对A、B系统,由牛
1 1 2 2
顿第二定律得:qE﹣mμg﹣ mg=2ma,对B,由牛μ顿第二定律得:T﹣mg=ma,代入数据解得:
T =10.8N或T =9.2N,故μD正确。
1 2
故选:ACD。
一.知识回顾
1.多物体组成的系统机械能守恒是否守恒的判断方法
看是否有其他形式的能与机械能相互转化。
2.三种守恒表达式的比较
角度 公式 意义 注意事项
系统的初状态机械能的
守恒 E+E 初、末状态必须用同一
k1 p1
总和与末状态机械能的
观点 =E+E 零势能面计算势能
k2 p2
总和相等
应用时关键在于分清势
系统减少(或增加)的势
转化 能的增加量或减少量,
ΔE=-ΔE 能等于系统增加(或减
k p
观点 可不选零势能面而直接
少)的动能
计算初、末状态的势能差
若系统由A、B两物体组
常用于解决两个或多个
转移 成,则A物体机械能的
ΔE =ΔE 物体组成的系统的机械
A增 B减
观点 增加量与B物体机械能
能守恒问题
的减少量相等
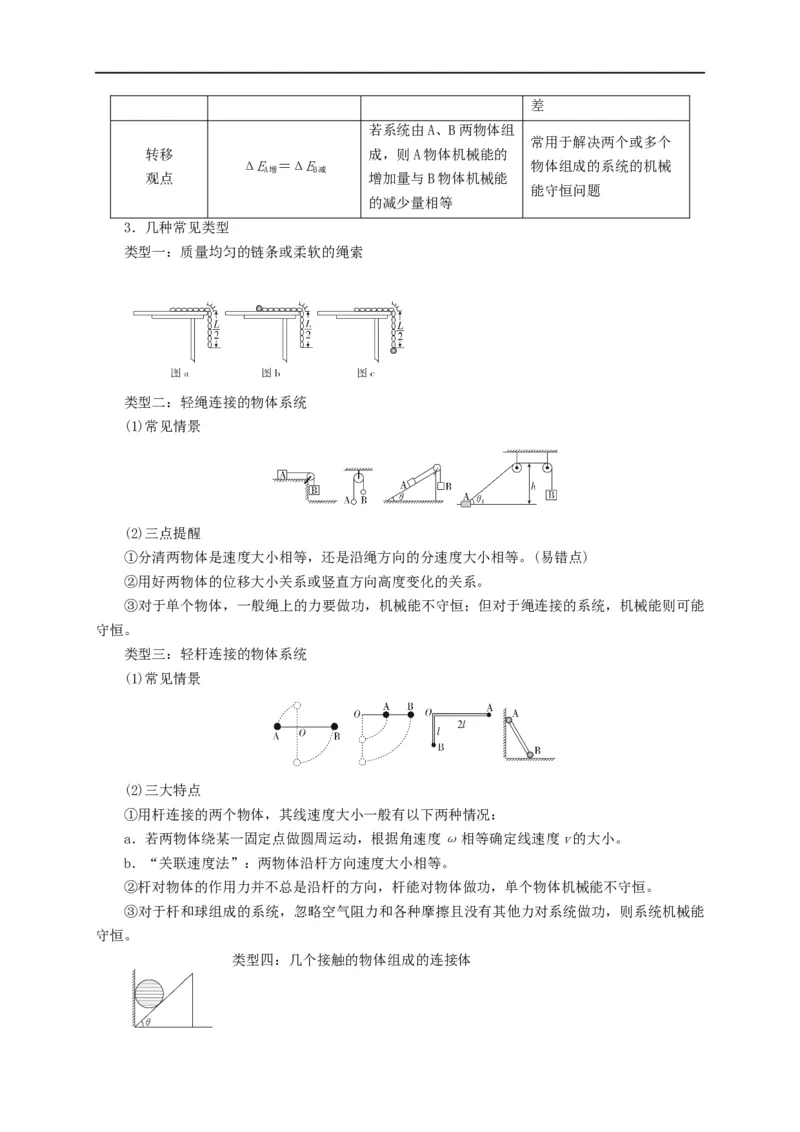
3.几种常见类型
类型一:质量均匀的链条或柔软的绳索
类型二:轻绳连接的物体系统
(1)常见情景
(2)三点提醒
①分清两物体是速度大小相等,还是沿绳方向的分速度大小相等。(易错点)
②用好两物体的位移大小关系或竖直方向高度变化的关系。
③对于单个物体,一般绳上的力要做功,机械能不守恒;但对于绳连接的系统,机械能则可能
守恒。
类型三:轻杆连接的物体系统
(1)常见情景
(2)三大特点
①用杆连接的两个物体,其线速度大小一般有以下两种情况:
a.若两物体绕某一固定点做圆周运动,根据角速度ω相等确定线速度v的大小。
b.“关联速度法”:两物体沿杆方向速度大小相等。
②杆对物体的作用力并不总是沿杆的方向,杆能对物体做功,单个物体机械能不守恒。
③对于杆和球组成的系统,忽略空气阻力和各种摩擦且没有其他力对系统做功,则系统机械能
守恒。
类型四:几个接触的物体组成的连接体二.例题精析
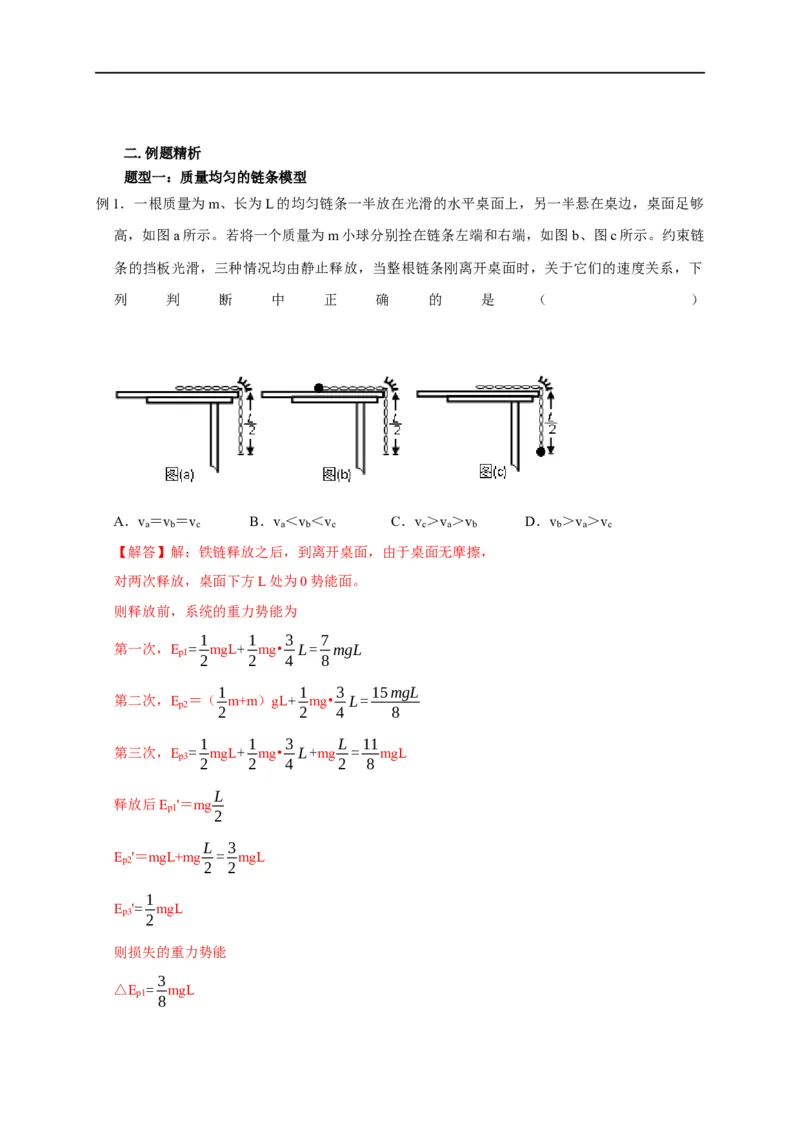
题型一:质量均匀的链条模型
例1.一根质量为m、长为L的均匀链条一半放在光滑的水平桌面上,另一半悬在桌边,桌面足够
高,如图a所示。若将一个质量为m小球分别拴在链条左端和右端,如图b、图c所示。约束链
条的挡板光滑,三种情况均由静止释放,当整根链条刚离开桌面时,关于它们的速度关系,下
列 判 断 中 正 确 的 是 ( )
A.v =v =v B.v <v <v C.v >v >v D.v >v >v
a b c a b c c a b b a c
【解答】解:铁链释放之后,到离开桌面,由于桌面无摩擦,
对两次释放,桌面下方L处为0势能面。
则释放前,系统的重力势能为
1 1 3 7
第一次,E = mgL+ mg• L= mgL
p1
2 2 4 8
1 1 3 15mgL
第二次,E =( m+m)gL+ mg• L=
p2
2 2 4 8
1 1 3 L 11
第三次,E = mgL+ mg• L+mg = mgL
p3
2 2 4 2 8
L
释放后E '=mg
p1
2
L 3
E '=mgL+mg = mgL
p2
2 2
1
E '= mgL
p3
2
则损失的重力势能
3
△E = mgL
p1
83
△E = mgL
p2
8
7
△E = mgL
p3
8
1
那么△E = mv 2
p1 a
2
1
△E = (2m)v 2
p2 b
2
1
△E = (2m)v 2
p3 c
2
3gL
解得:v 2=
a
4
3
v 2= gL
b
8
7
v 2= gL
c
8
显然 v 2>v 2>v 2,
c a b
所以v >v >v ,
c a b
故选:C。
题型二:轻绳连接的物体系统
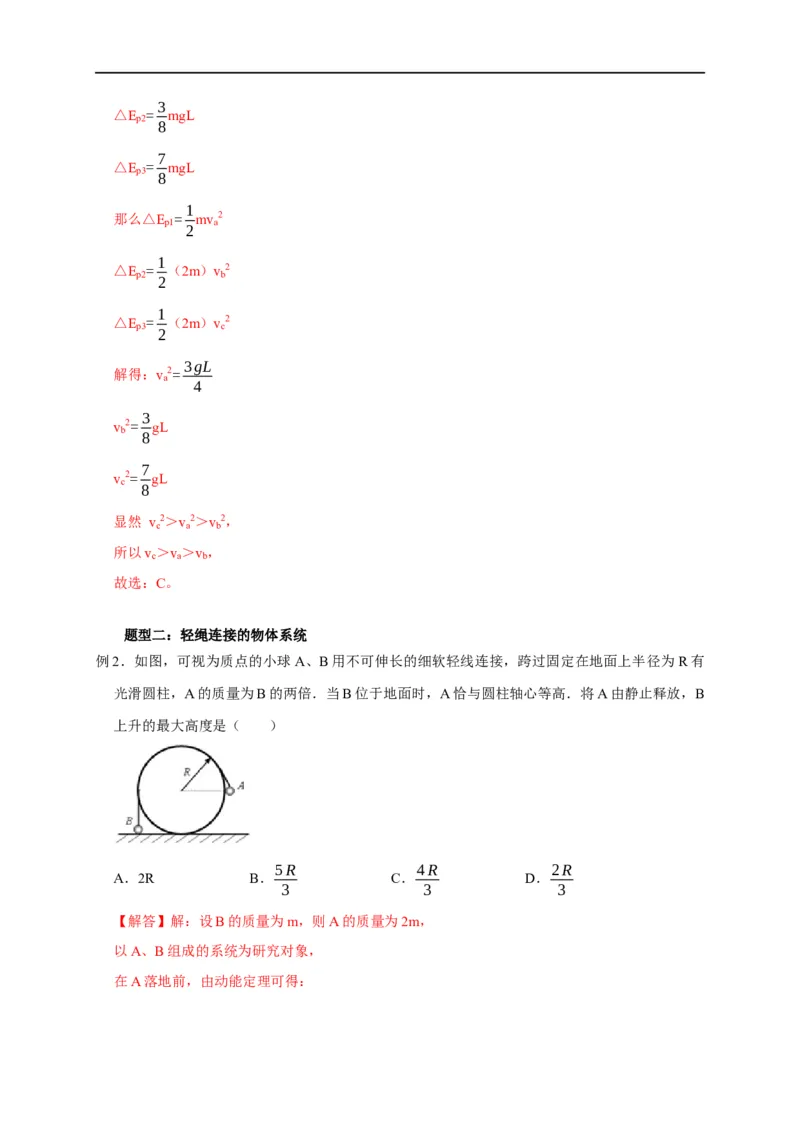
例2.如图,可视为质点的小球A、B用不可伸长的细软轻线连接,跨过固定在地面上半径为R有
光滑圆柱,A的质量为B的两倍.当B位于地面时,A恰与圆柱轴心等高.将A由静止释放,B
上升的最大高度是( )
5R 4R 2R
A.2R B. C. D.
3 3 3
【解答】解:设B的质量为m,则A的质量为2m,
以A、B组成的系统为研究对象,
在A落地前,由动能定理可得:1
﹣mgR+2mgR= (m+2m)v2﹣0,
2
以B为研究对象,在B上升过程中,
1
由动能定理可得:﹣mgh=0- mv2,
2
则B上升的最大高度H=R+h,
4R
解得:H= ;
3
故选:C。
题型三:轻杆连接的物体系统
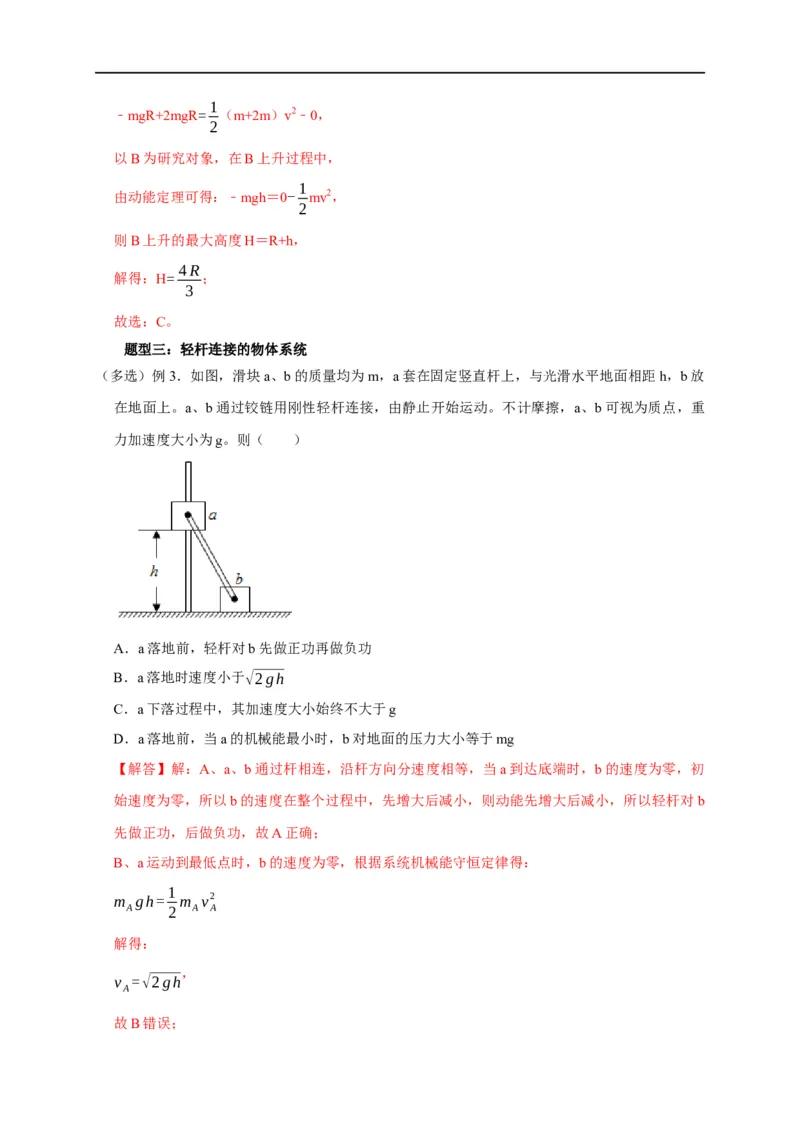
(多选)例3.如图,滑块a、b的质量均为m,a套在固定竖直杆上,与光滑水平地面相距h,b放
在地面上。a、b通过铰链用刚性轻杆连接,由静止开始运动。不计摩擦,a、b可视为质点,重
力加速度大小为g。则( )
A.a落地前,轻杆对b先做正功再做负功
B.a落地时速度小于√2gh
C.a下落过程中,其加速度大小始终不大于g
D.a落地前,当a的机械能最小时,b对地面的压力大小等于mg
【解答】解:A、a、b通过杆相连,沿杆方向分速度相等,当a到达底端时,b的速度为零,初
始速度为零,所以b的速度在整个过程中,先增大后减小,则动能先增大后减小,所以轻杆对b
先做正功,后做负功,故A正确;
B、a运动到最低点时,b的速度为零,根据系统机械能守恒定律得:
1
m gh= m v2
A 2 A A
解得:
,
v =√2gh
A
故B错误;C、b的速度在整个过程中,先增大后减小,所以杆对b的作用力先是动力后是阻力,所以杆对
a的作用力就先是阻力后是动力,所以在b减速的过程中,杆对a是向下的拉力,此时a的加速
度大于重力加速度,故C错误;
D、a、b整体的机械能守恒,当a的机械能最小时,b的速度最大,此时b受到a的推力为零,b
只受到重力的作用,所以b对地面的压力大小为mg,故D正确。
故选:AD。
三.举一反三,巩固练习
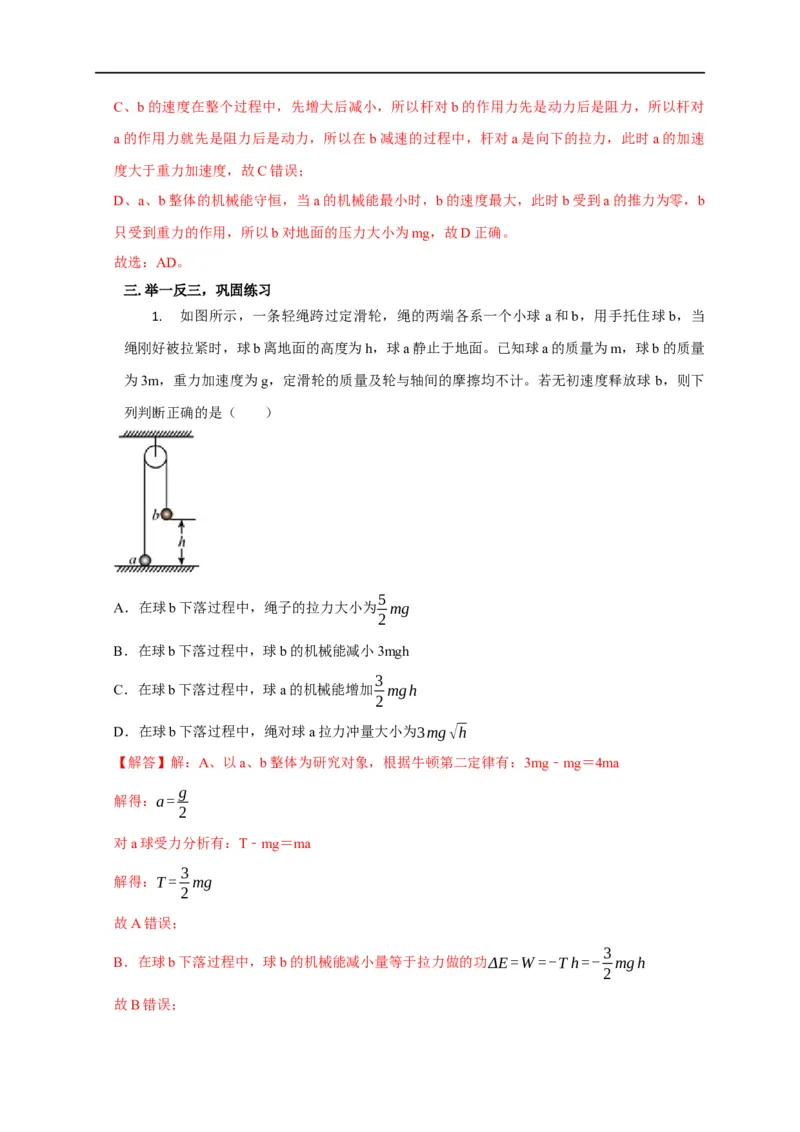
1. 如图所示,一条轻绳跨过定滑轮,绳的两端各系一个小球 a和b,用手托住球b,当
绳刚好被拉紧时,球b离地面的高度为h,球a静止于地面。已知球a的质量为m,球b的质量
为3m,重力加速度为g,定滑轮的质量及轮与轴间的摩擦均不计。若无初速度释放球 b,则下
列判断正确的是( )
5
A.在球b下落过程中,绳子的拉力大小为 mg
2
B.在球b下落过程中,球b的机械能减小3mgh
3
C.在球b下落过程中,球a的机械能增加 mgh
2
D.在球b下落过程中,绳对球a拉力冲量大小为3mg√h
【解答】解:A、以a、b整体为研究对象,根据牛顿第二定律有:3mg﹣mg=4ma
g
解得:a=
2
对a球受力分析有:T﹣mg=ma
3
解得:T= mg
2
故A错误;
3
B.在球b下落过程中,球b的机械能减小量等于拉力做的功ΔE=W =-Th=- mgh
2
故B错误;3
C.在球b下落过程中,球a的机械能的增加量等于拉力做的功ΔE=W =Th= mgh
2
故C正确;
1
D.在球b下落过程中,根据位移—时间关系有:h= gt2
2
√h
解得t=2
g
则在球b下落过程中,绳对球a拉力冲量大小为I=Tt=3m√gh
故D错误。
故选:C。
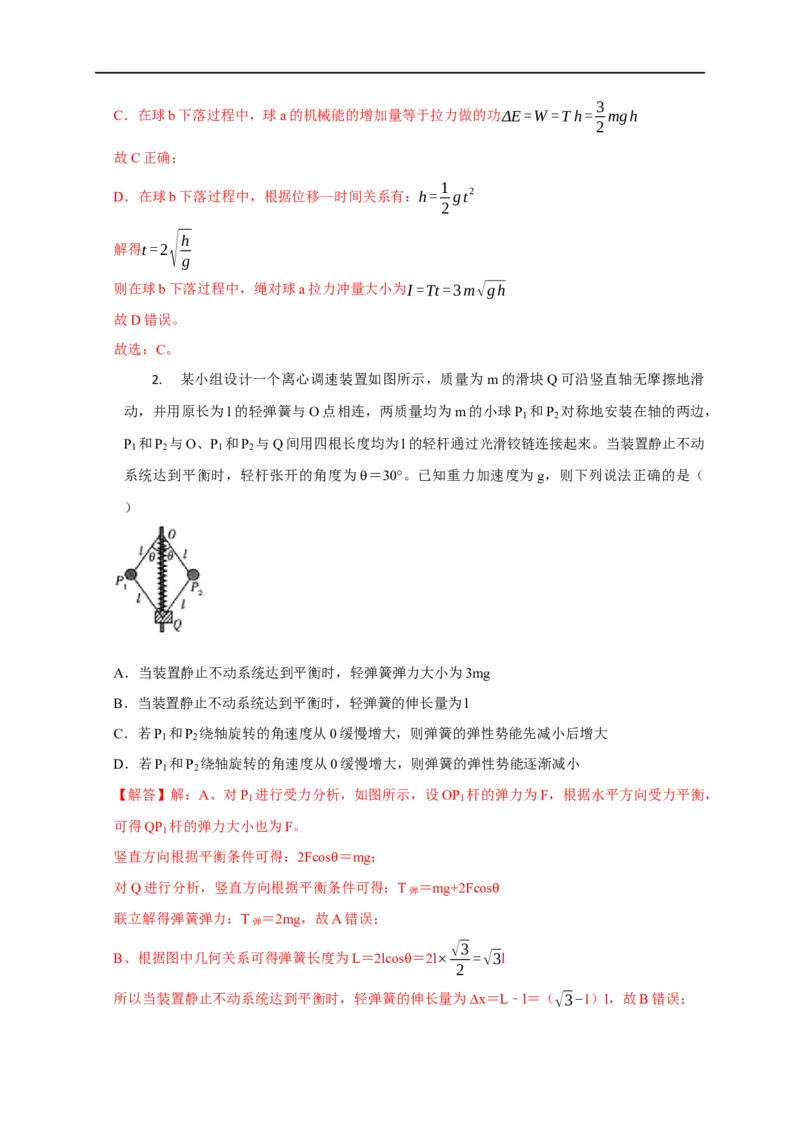
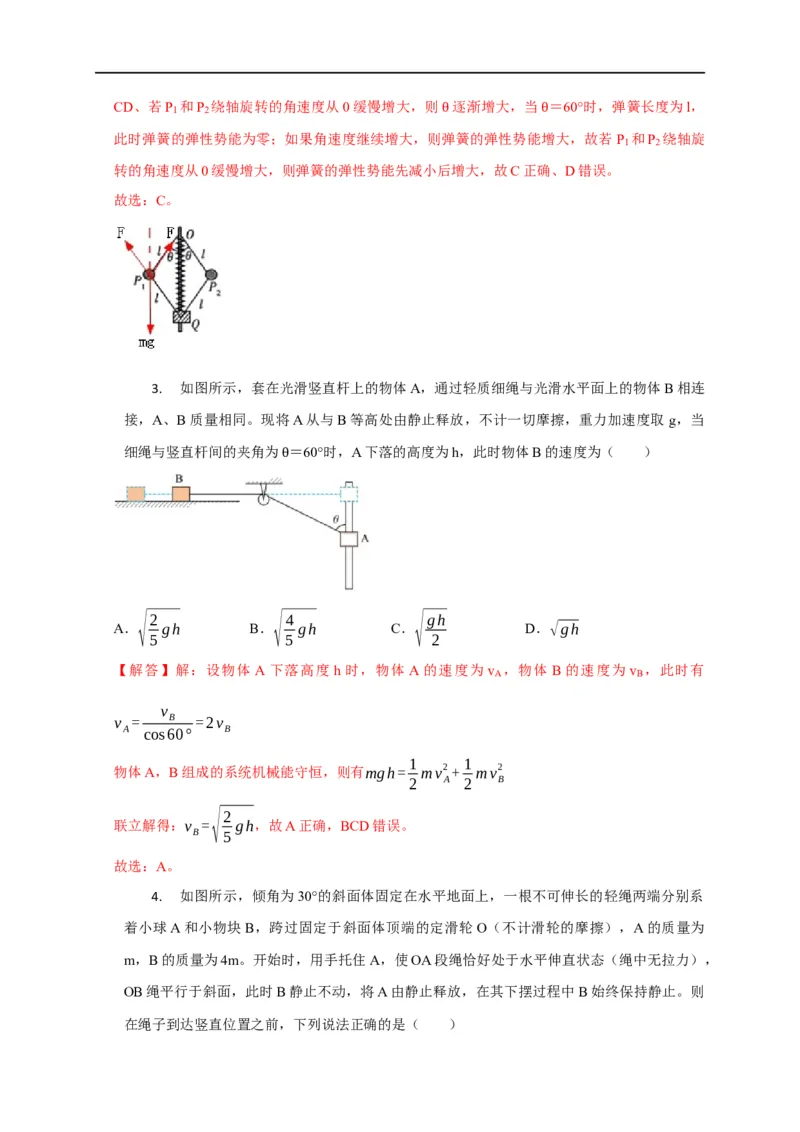
2. 某小组设计一个离心调速装置如图所示,质量为m的滑块Q可沿竖直轴无摩擦地滑
动,并用原长为l的轻弹簧与O点相连,两质量均为m的小球P 和P 对称地安装在轴的两边,
1 2
P 和P 与O、P 和P 与Q间用四根长度均为l的轻杆通过光滑铰链连接起来。当装置静止不动
1 2 1 2
系统达到平衡时,轻杆张开的角度为 =30°。已知重力加速度为g,则下列说法正确的是(
) θ
A.当装置静止不动系统达到平衡时,轻弹簧弹力大小为3mg
B.当装置静止不动系统达到平衡时,轻弹簧的伸长量为l
C.若P 和P 绕轴旋转的角速度从0缓慢增大,则弹簧的弹性势能先减小后增大
1 2
D.若P 和P 绕轴旋转的角速度从0缓慢增大,则弹簧的弹性势能逐渐减小
1 2
【解答】解:A、对P 进行受力分析,如图所示,设OP 杆的弹力为F,根据水平方向受力平衡,
1 1
可得QP 杆的弹力大小也为F。
1
竖直方向根据平衡条件可得:2Fcos =mg;
对Q进行分析,竖直方向根据平衡条θ件可得:T弹 =mg+2Fcos
联立解得弹簧弹力:T弹 =2mg,故A错误; θ
√3
B、根据图中几何关系可得弹簧长度为L=2lcos =2l× =√3l
2
θ
所以当装置静止不动系统达到平衡时,轻弹簧的伸长量为Δx=L﹣l=(√3-1)l,故B错误;CD、若P 和P 绕轴旋转的角速度从0缓慢增大,则 逐渐增大,当 =60°时,弹簧长度为l,
1 2
此时弹簧的弹性势能为零;如果角速度继续增大,则弹θ 簧的弹性势能增θ 大,故若 P 和P 绕轴旋
1 2
转的角速度从0缓慢增大,则弹簧的弹性势能先减小后增大,故C正确、D错误。
故选:C。
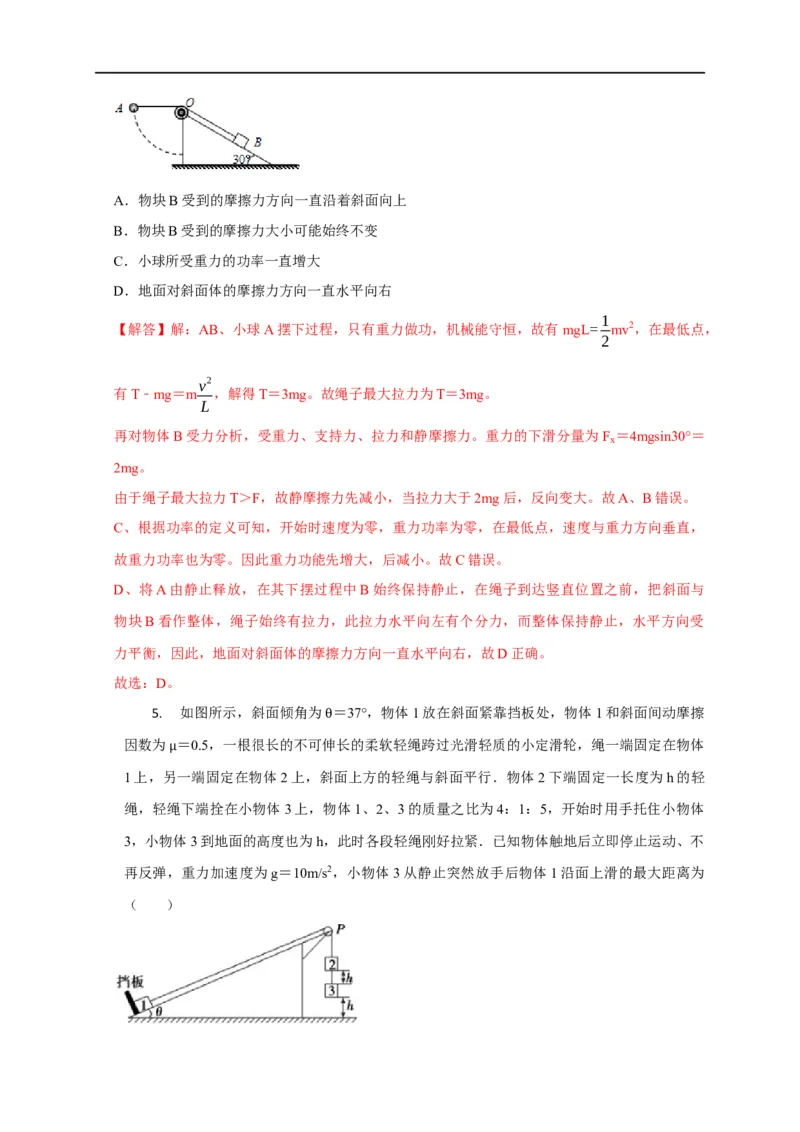
3. 如图所示,套在光滑竖直杆上的物体A,通过轻质细绳与光滑水平面上的物体B相连
接,A、B质量相同。现将A从与B等高处由静止释放,不计一切摩擦,重力加速度取 g,当
细绳与竖直杆间的夹角为 =60°时,A下落的高度为h,此时物体B的速度为( )
θ
√2 √4 √gh
A. gh B. gh C. D.√gh
5 5 2
【解答】解:设物体 A 下落高度 h 时,物体 A 的速度为 v ,物体 B 的速度为 v ,此时有
A B
v
v = B =2v
A cos60° B
1 1
物体A,B组成的系统机械能守恒,则有mgh= mv2 + mv2
2 A 2 B
√2
联立解得:v = gh,故A正确,BCD错误。
B 5
故选:A。
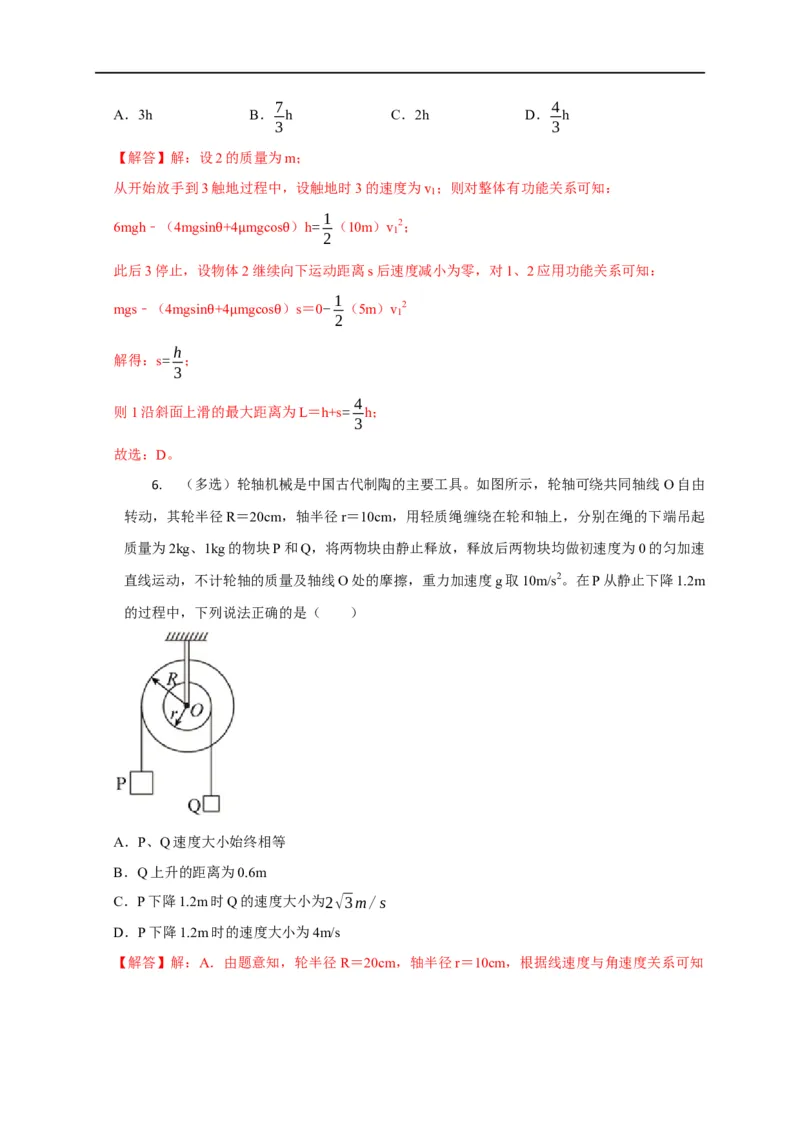
4. 如图所示,倾角为30°的斜面体固定在水平地面上,一根不可伸长的轻绳两端分别系
着小球A和小物块B,跨过固定于斜面体顶端的定滑轮O(不计滑轮的摩擦),A的质量为
m,B的质量为4m。开始时,用手托住A,使OA段绳恰好处于水平伸直状态(绳中无拉力),
OB绳平行于斜面,此时B静止不动,将A由静止释放,在其下摆过程中B始终保持静止。则
在绳子到达竖直位置之前,下列说法正确的是( )A.物块B受到的摩擦力方向一直沿着斜面向上
B.物块B受到的摩擦力大小可能始终不变
C.小球所受重力的功率一直增大
D.地面对斜面体的摩擦力方向一直水平向右
1
【解答】解:AB、小球A摆下过程,只有重力做功,机械能守恒,故有mgL= mv2,在最低点,
2
v2
有T﹣mg=m ,解得T=3mg。故绳子最大拉力为T=3mg。
L
再对物体B受力分析,受重力、支持力、拉力和静摩擦力。重力的下滑分量为F =4mgsin30°=
x
2mg。
由于绳子最大拉力T>F,故静摩擦力先减小,当拉力大于2mg后,反向变大。故A、B错误。
C、根据功率的定义可知,开始时速度为零,重力功率为零,在最低点,速度与重力方向垂直,
故重力功率也为零。因此重力功能先增大,后减小。故C错误。
D、将A由静止释放,在其下摆过程中B始终保持静止,在绳子到达竖直位置之前,把斜面与
物块B看作整体,绳子始终有拉力,此拉力水平向左有个分力,而整体保持静止,水平方向受
力平衡,因此,地面对斜面体的摩擦力方向一直水平向右,故D正确。
故选:D。
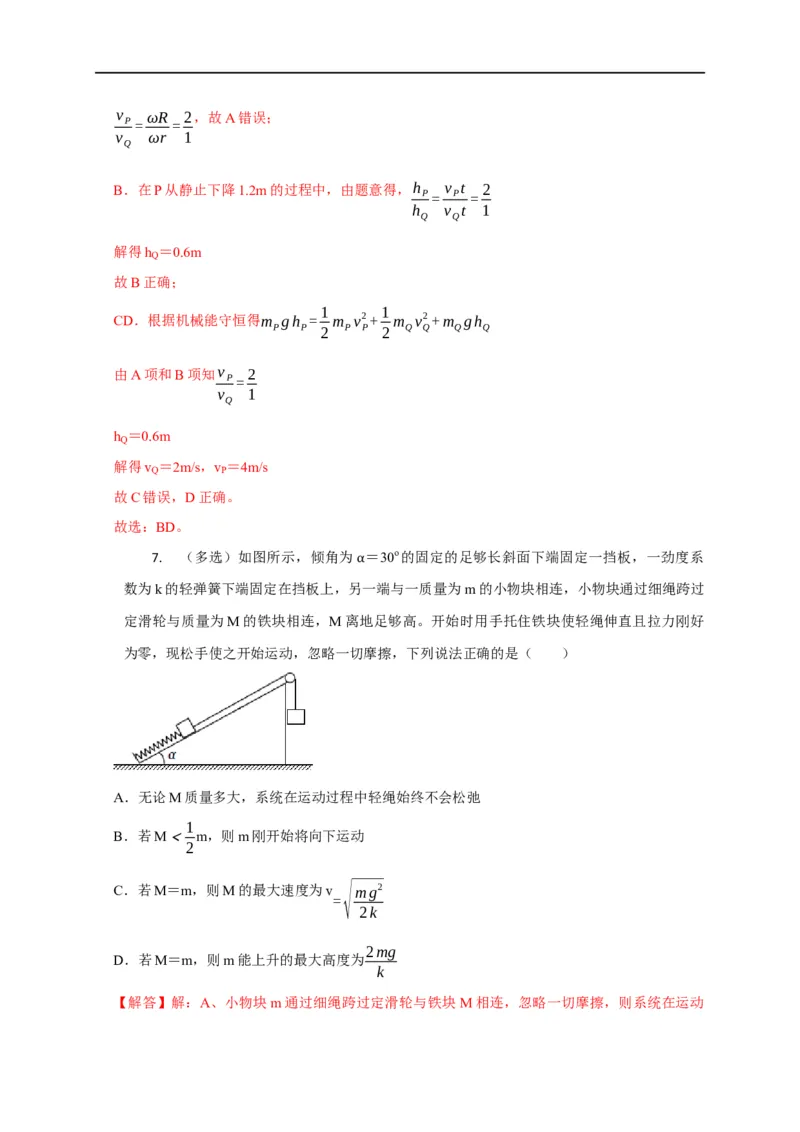
5. 如图所示,斜面倾角为 =37°,物体1放在斜面紧靠挡板处,物体1和斜面间动摩擦
因数为 =0.5,一根很长的不可伸θ长的柔软轻绳跨过光滑轻质的小定滑轮,绳一端固定在物体
1上,另μ一端固定在物体2上,斜面上方的轻绳与斜面平行.物体2下端固定一长度为h的轻
绳,轻绳下端拴在小物体3上,物体1、2、3的质量之比为4:1:5,开始时用手托住小物体
3,小物体3到地面的高度也为h,此时各段轻绳刚好拉紧.已知物体触地后立即停止运动、不
再反弹,重力加速度为g=10m/s2,小物体3从静止突然放手后物体1沿面上滑的最大距离为
( )7 4
A.3h B. h C.2h D. h
3 3
【解答】解:设2的质量为m;
从开始放手到3触地过程中,设触地时3的速度为v ;则对整体有功能关系可知:
1
1
6mgh﹣(4mgsin +4 mgcos )h= (10m)v 2;
1
2
θ μ θ
此后3停止,设物体2继续向下运动距离s后速度减小为零,对1、2应用功能关系可知:
1
mgs﹣(4mgsin +4 mgcos )s=0- (5m)v 2
1
2
θ μ θ
h
解得:s= ;
3
4
则1沿斜面上滑的最大距离为L=h+s= h;
3
故选:D。
6. (多选)轮轴机械是中国古代制陶的主要工具。如图所示,轮轴可绕共同轴线O自由
转动,其轮半径R=20cm,轴半径r=10cm,用轻质绳缠绕在轮和轴上,分别在绳的下端吊起
质量为2kg、1kg的物块P和Q,将两物块由静止释放,释放后两物块均做初速度为0的匀加速
直线运动,不计轮轴的质量及轴线O处的摩擦,重力加速度g取10m/s2。在P从静止下降1.2m
的过程中,下列说法正确的是( )
A.P、Q速度大小始终相等
B.Q上升的距离为0.6m
C.P下降1.2m时Q的速度大小为2√3m/s
D.P下降1.2m时的速度大小为4m/s
【解答】解:A.由题意知,轮半径R=20cm,轴半径r=10cm,根据线速度与角速度关系可知v ωR 2,故A错误;
P = =
v ωr 1
Q
B.在P从静止下降1.2m的过程中,由题意得,h v t 2
P = P =
h v t 1
Q Q
解得h =0.6m
Q
故B正确;
1 1
CD.根据机械能守恒得m gh = m v2+ m v2 +m gh
P P 2 P P 2 Q Q Q Q
由A项和B项知v 2
P =
v 1
Q
h =0.6m
Q
解得v =2m/s,v =4m/s
Q P
故C错误,D正确。
故选:BD。
7. (多选)如图所示,倾角为 =30o的固定的足够长斜面下端固定一挡板,一劲度系
数为k的轻弹簧下端固定在挡板上,另α一端与一质量为m的小物块相连,小物块通过细绳跨过
定滑轮与质量为M的铁块相连,M离地足够高。开始时用手托住铁块使轻绳伸直且拉力刚好
为零,现松手使之开始运动,忽略一切摩擦,下列说法正确的是( )
A.无论M质量多大,系统在运动过程中轻绳始终不会松弛
1
B.若M< m,则m刚开始将向下运动
2
C.若M=m,则M的最大速度为v √mg2
=
2k
2mg
D.若M=m,则m能上升的最大高度为
k
【解答】解:A、小物块m通过细绳跨过定滑轮与铁块M相连,忽略一切摩擦,则系统在运动过程中轻绳始终不会松弛,与M的质量大小无关,故A正确;
B、开始时轻绳拉力刚好为零,m的合力为零,松手后,m的合力等于绳的拉力,则m刚开始将
向上运动,故B错误;
C、若M=m,当M的合力为零时速度最大,则有T=Mg。对m,开始时有mgsin30°=kx ,弹
1
mg
簧压缩量为x = 。当M的速度最大时m的速度也最大,m的合力也为零,则有T=mgsin30°
1
2k
mg
+kx ,此时弹簧伸长量为x = 。因x =x ,则此过程中弹簧弹性势能变化量为零。从开始释
2 2 1 2
2k
1
放到M最大速度,由系统的机械能守恒得:Mg(x +x )=mg(x +x )sin30°+ (M+m)v2,
1 2 1 2
2
解得v √mg2,故C正确;
=
2k
1
D、设若 M=m,则 m 能上升的最大高度为 L。由系统的机械能守恒得:MgL+ kx2=
2 1
1 2mg
mgLsin30°+ k(L-x ) 2,解得L= ,故D正确。
2 1 k
故选:ACD。
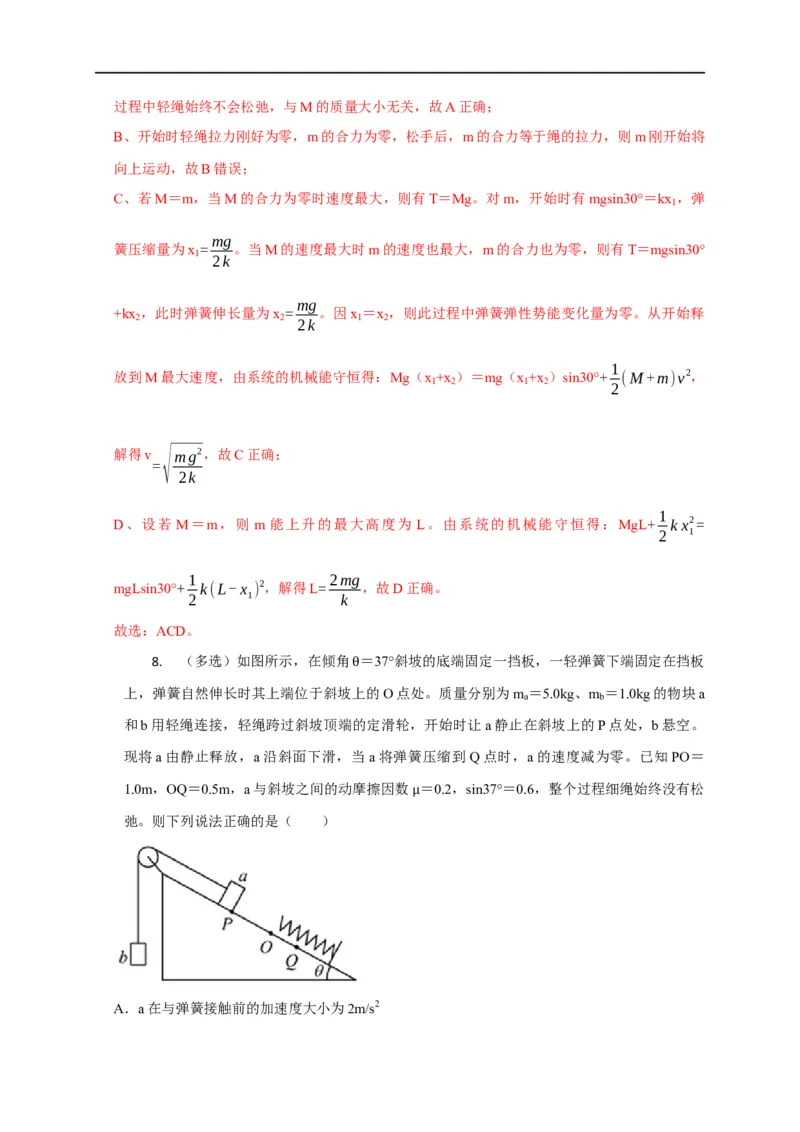
8. (多选)如图所示,在倾角 =37°斜坡的底端固定一挡板,一轻弹簧下端固定在挡板
上,弹簧自然伸长时其上端位于斜坡上θ 的O点处。质量分别为m =5.0kg、m =1.0kg的物块a
a b
和b用轻绳连接,轻绳跨过斜坡顶端的定滑轮,开始时让a静止在斜坡上的P点处,b悬空。
现将a由静止释放,a沿斜面下滑,当a将弹簧压缩到Q点时,a的速度减为零。已知PO=
1.0m,OQ=0.5m,a与斜坡之间的动摩擦因数 =0.2,sin37°=0.6,整个过程细绳始终没有松
弛。则下列说法正确的是( ) μ
A.a在与弹簧接触前的加速度大小为2m/s2B.a在与弹簧接触前,轻绳上的拉力为10N
C.a位于Q点时,弹簧所储存的弹性势能为18J
2√3
D.a第一次被弹回到O点时的速度为 m/s
3
【解答】解:AB、a 与弹簧接触前,对 a、b 组成的系统,由牛顿第二定律得:m gsin ﹣
a
m gcos ﹣m g=(m +m )a θ
a b a b
μ对物块bθ,由牛顿第二定律得:T﹣m g=m a
b b
代入数据解得:a=2m/s2,T=12N,故A正确、B错误;
C、物块a由P到Q过程,对物块a、b组成的系统,由能量守恒定律可知,a位于Q时,弹簧的
弹性势能:
E =m g(PO+OQ)sin ﹣ m gcos (PO+OQ)﹣m g(PO+OQ)sin
p a a b
代入数据解得:E =18Jθ,故μ C正确θ; θ
p
D、a由Q第一次到达O点过程,对a、b组成的系统,由动能定理得:
1
E ﹣m g•OQ•sin ﹣ m g•OQ•cos +m g•OQ•sin = (m +m )v2﹣0
p a a b a b
2
θ μ θ θ
2√3
代入数据解得:v= m/s,故D正确。
3
故选:ACD。
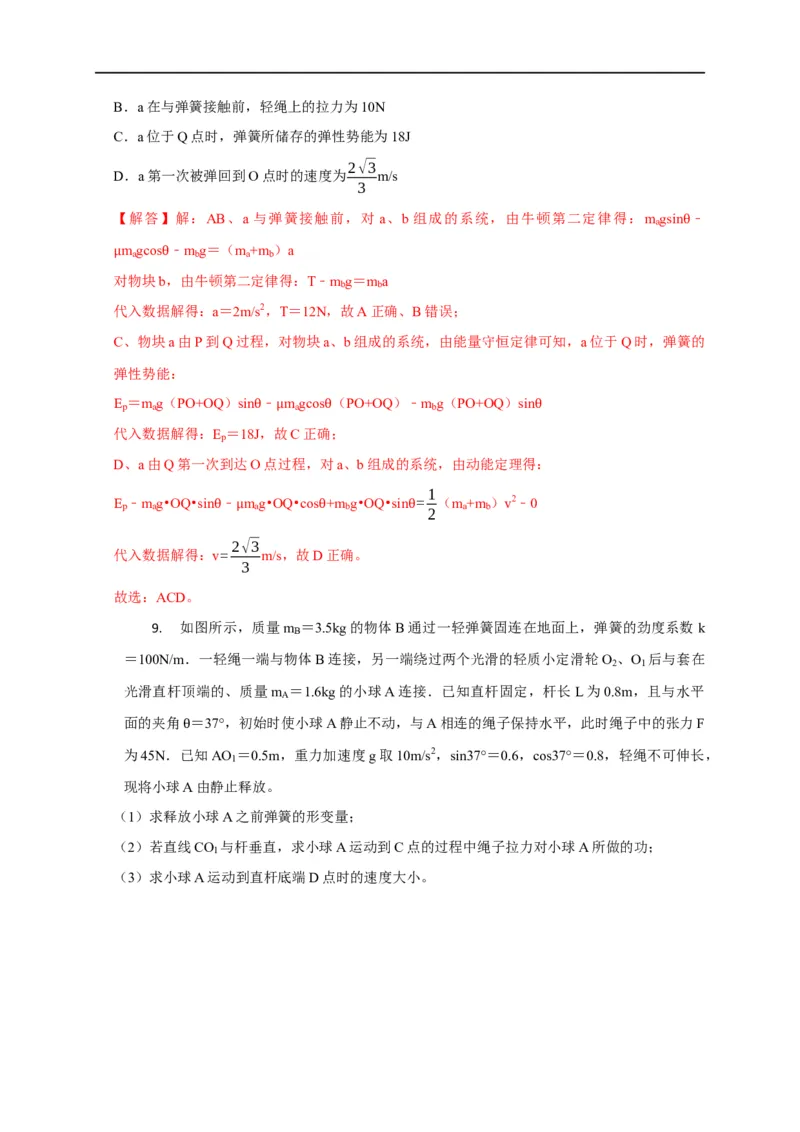
9. 如图所示,质量m =3.5kg的物体B通过一轻弹簧固连在地面上,弹簧的劲度系数 k
B
=100N/m.一轻绳一端与物体B连接,另一端绕过两个光滑的轻质小定滑轮O 、O 后与套在
2 1
光滑直杆顶端的、质量m =1.6kg的小球A连接.已知直杆固定,杆长L为0.8m,且与水平
A
面的夹角 =37°,初始时使小球A静止不动,与A相连的绳子保持水平,此时绳子中的张力F
为45N.已θ知AO =0.5m,重力加速度g取10m/s2,sin37°=0.6,cos37°=0.8,轻绳不可伸长,
1
现将小球A由静止释放。
(1)求释放小球A之前弹簧的形变量;
(2)若直线CO 与杆垂直,求小球A运动到C点的过程中绳子拉力对小球A所做的功;
1
(3)求小球A运动到直杆底端D点时的速度大小。【解答】解:(1)释放小球A之前,对B受力分析,有:
F=m g+kx ,
B 1
得:x =0.1 m,即弹簧伸长0.1 m;
1
(2)由几何关系可知,小球A运动到C点时弹簧被压缩0.1 m,故弹性势能不变,且此时v =
B
0,则:
W绳A =W B绳 =|ΔE pB |=m B gh B =m B g(2x 1 )
解得:W绳A =7 J;
(3)由几何关系可知,小球A运动到D点时弹簧被拉伸0.1 m,故弹性势能不变,且此时:
v =v cos ,
B A
A、B及弹θ簧系统系统机械能守恒,有:
1 1
m gLsinθ= m v 2+ m v 2
A 2 A A 2 B B
联立解得:v =2m/s。
A
答:(1)释放小球A之前弹簧的形变量为0.1m;
(2)若直线CO 与杆垂直,小球A运动到C点的过程中绳子拉力对小球A所做的功为7J;
1
(3)小球A运动到直杆底端D点时的速度大小为2m/s。
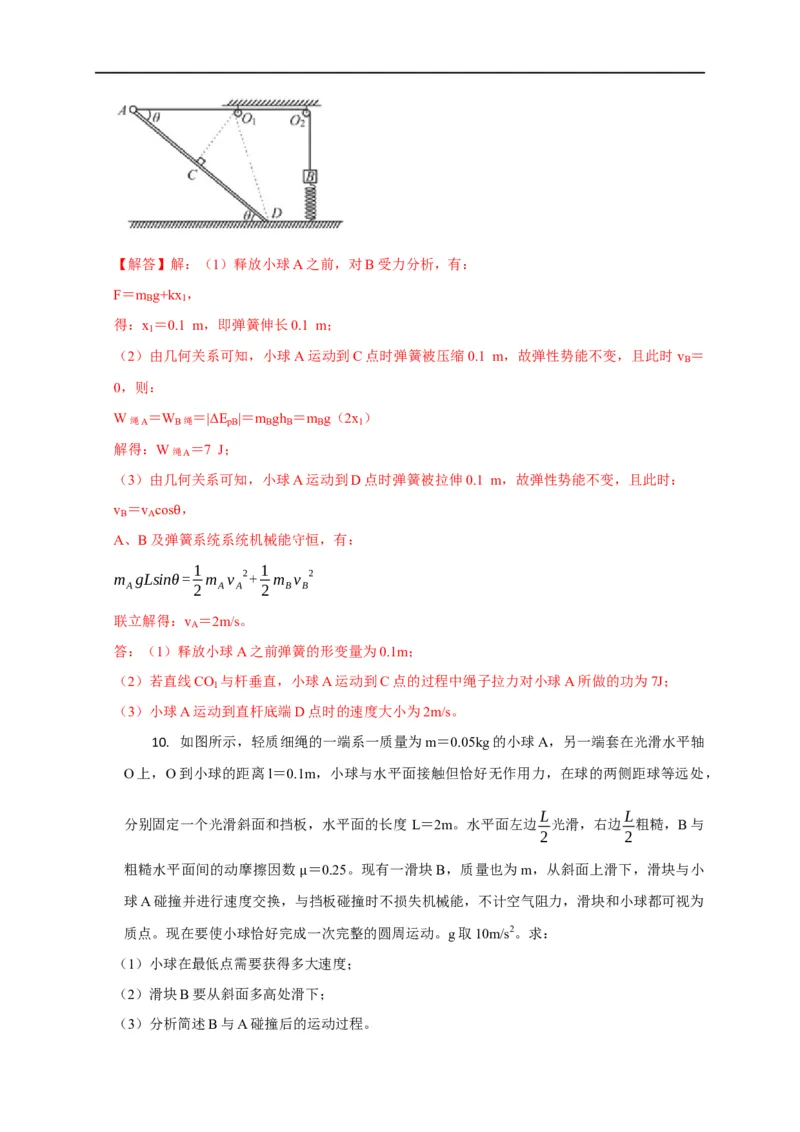
10. 如图所示,轻质细绳的一端系一质量为m=0.05kg的小球A,另一端套在光滑水平轴
O上,O到小球的距离l=0.1m,小球与水平面接触但恰好无作用力,在球的两侧距球等远处,
L L
分别固定一个光滑斜面和挡板,水平面的长度 L=2m。水平面左边 光滑,右边 粗糙,B与
2 2
粗糙水平面间的动摩擦因数 =0.25。现有一滑块B,质量也为m,从斜面上滑下,滑块与小
球A碰撞并进行速度交换,与μ挡板碰撞时不损失机械能,不计空气阻力,滑块和小球都可视为
质点。现在要使小球恰好完成一次完整的圆周运动。g取10m/s2。求:
(1)小球在最低点需要获得多大速度;
(2)滑块B要从斜面多高处滑下;
(3)分析简述B与A碰撞后的运动过程。【解答】解:(1)小球恰好完成一次完整的圆周运动,它在最高点的速度设为 v ,自身重力提
0
供向心力,有 v2
mg=m 0
l
1 1
小球从最低点运动到最高点过程中,机械能守恒,可得 mv2+2mgl= mv2
2 0 2 A
联立,可得
v =√5m/s
A
(2)滑块B与小球A碰撞并进行速度交换,所以滑块B与小球A碰撞前的速度为
v =√5m/s
B
1
设滑块B要从斜面h高处滑下,由机械能守恒可得mgh= mv2
2 B
解得:h=0.25m
(3)B与A碰撞,交换速度后静止在地面上,当小球A做完一次圆周运动再次与滑块B发生碰
L 1 1
撞,然后滑块B具有v 向右运动,设到挡板时的速度为v' ,则有-μmg = mv '2- mv2
B B 2 2 B 2 B
解得:v' =0
B
即滑块B滑到挡板处恰好停下来。
综上所述,B与A碰撞后先静止一段时间,然后小球圆周运动一周后再次与滑块B交换速度,
致使滑块B向右做匀减速直线运动,到达挡板处时恰好速度为零,静止不动。
答案:(1)√5m/s;(2)0.25m;(3)B与A碰撞后先静止一段时间,然后小球圆周运动一周
后再次与滑块B交换速度,致使滑块B向右做匀减速直线运动,到达挡板处时恰好速度为零,
静止不动。
