文档内容
知识点 10:探究两个互成角度的力的合成规律
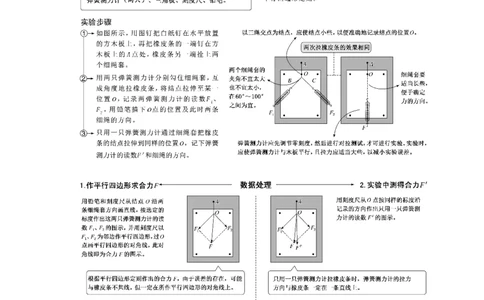
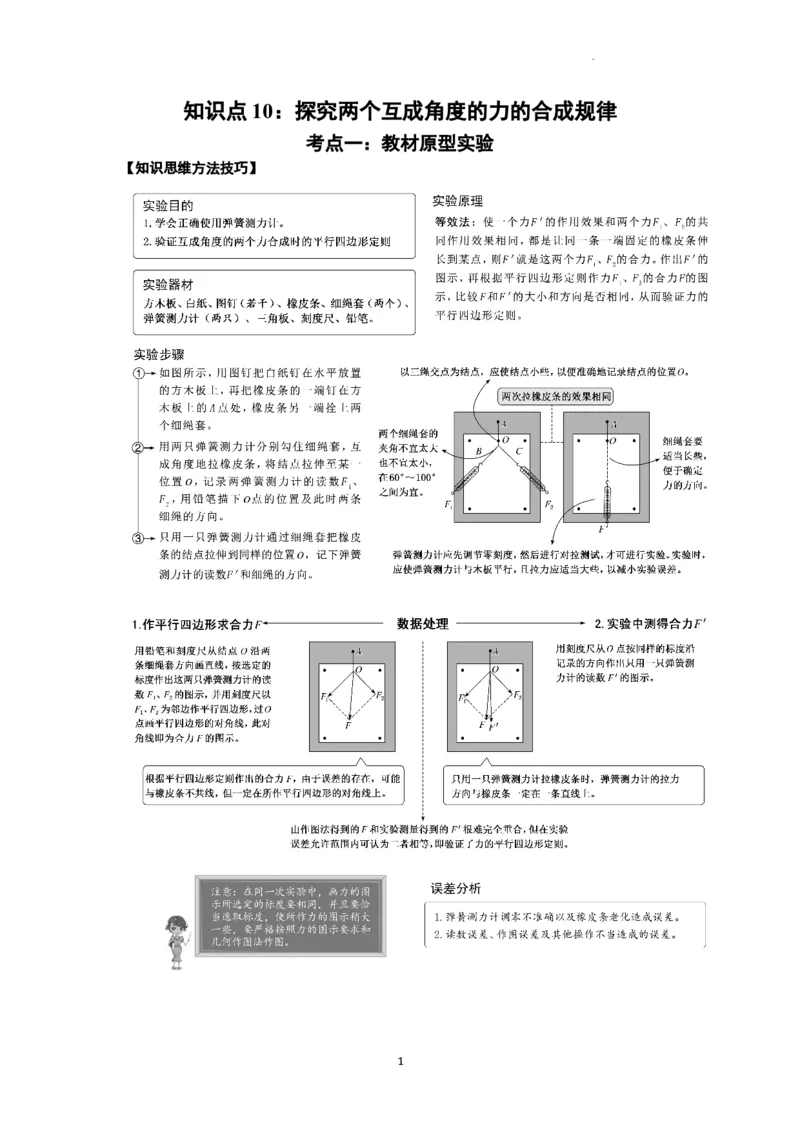
考点一:教材原型实验
【知识思维方法技巧】
1
学科网(北京)股份有限公司【典例1提高题】在“探究两个互成角度的力的合成规律”的实验中.
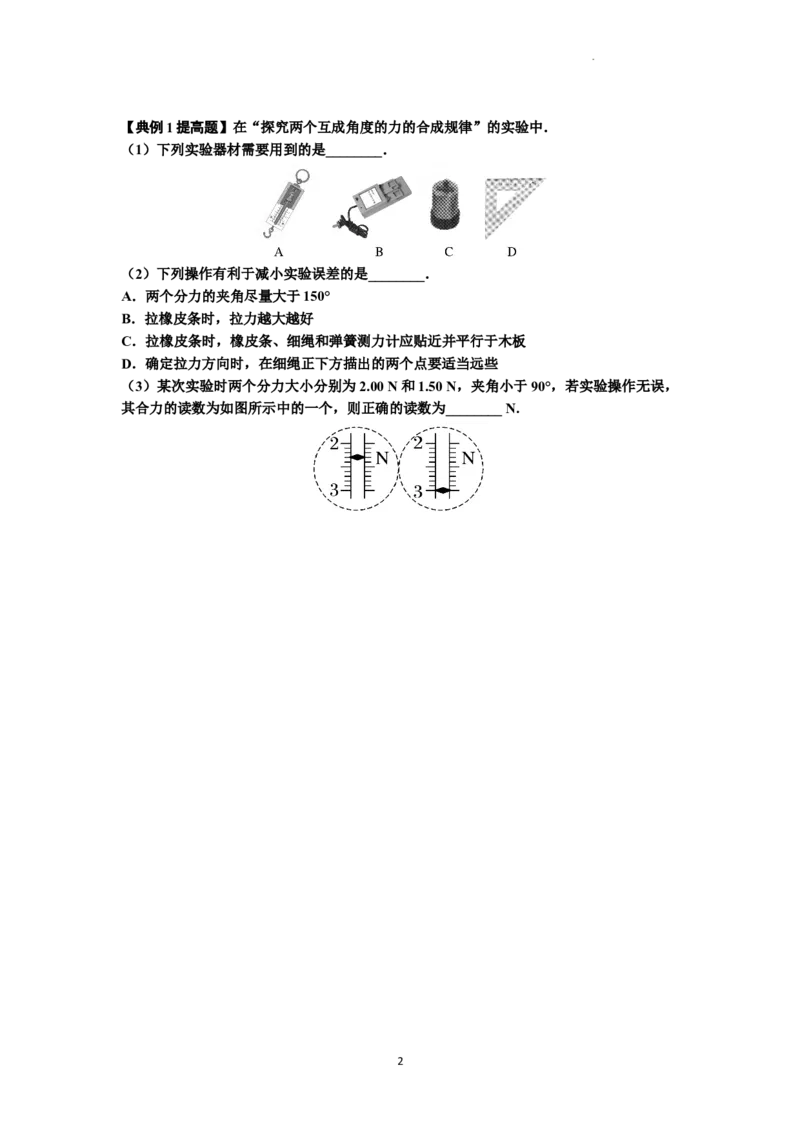
(1)下列实验器材需要用到的是________.
(2)下列操作有利于减小实验误差的是________.
A.两个分力的夹角尽量大于150°
B.拉橡皮条时,拉力越大越好
C.拉橡皮条时,橡皮条、细绳和弹簧测力计应贴近并平行于木板
D.确定拉力方向时,在细绳正下方描出的两个点要适当远些
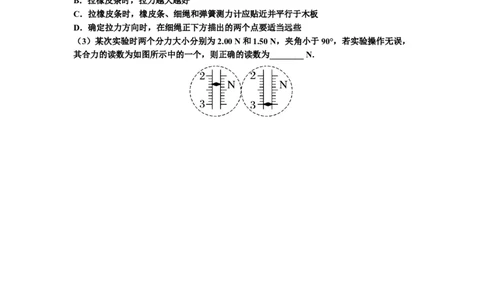
(3)某次实验时两个分力大小分别为2.00 N和1.50 N,夹角小于90°,若实验操作无误,
其合力的读数为如图所示中的一个,则正确的读数为________ N.
2
学科网(北京)股份有限公司【典例1提高题对应练习】某学生学习小组在课外做“验证力的平行四边形定则”的实验.
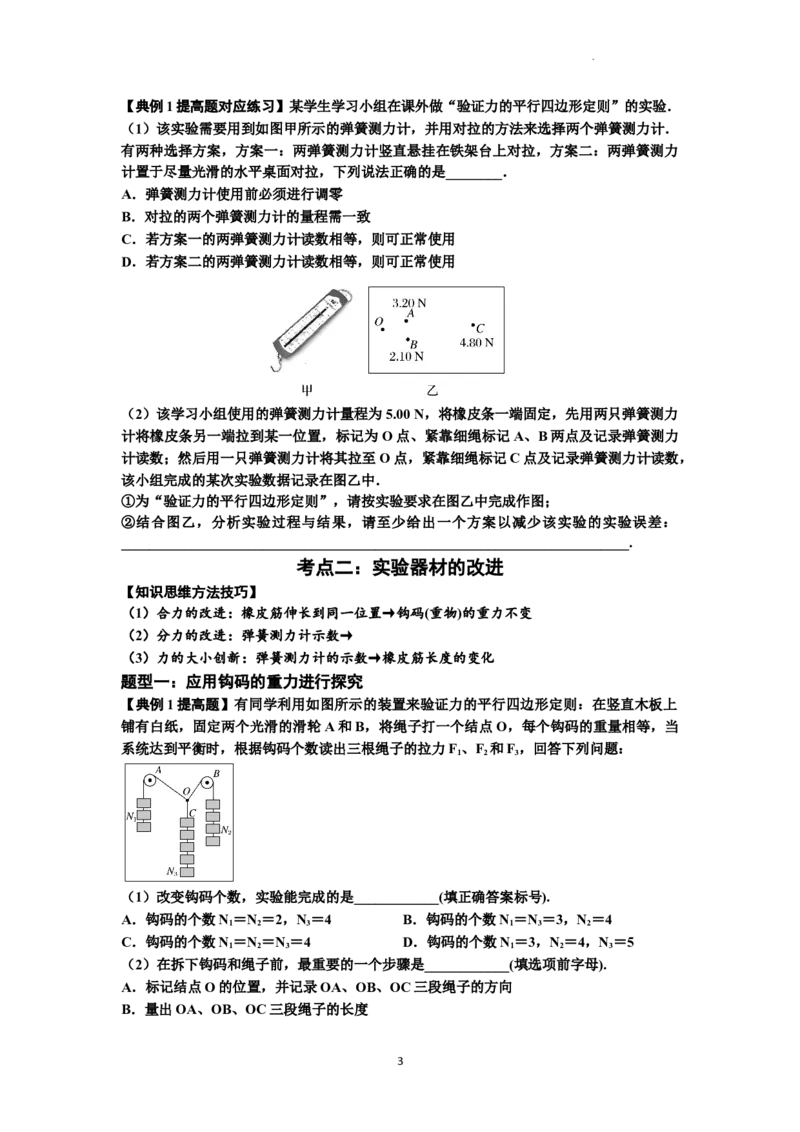
(1)该实验需要用到如图甲所示的弹簧测力计,并用对拉的方法来选择两个弹簧测力计.
有两种选择方案,方案一:两弹簧测力计竖直悬挂在铁架台上对拉,方案二:两弹簧测力
计置于尽量光滑的水平桌面对拉,下列说法正确的是________.
A.弹簧测力计使用前必须进行调零
B.对拉的两个弹簧测力计的量程需一致
C.若方案一的两弹簧测力计读数相等,则可正常使用
D.若方案二的两弹簧测力计读数相等,则可正常使用
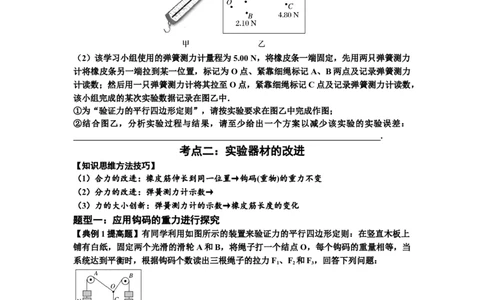
(2)该学习小组使用的弹簧测力计量程为5.00 N,将橡皮条一端固定,先用两只弹簧测力
计将橡皮条另一端拉到某一位置,标记为O点、紧靠细绳标记A、B两点及记录弹簧测力
计读数;然后用一只弹簧测力计将其拉至O点,紧靠细绳标记C点及记录弹簧测力计读数,
该小组完成的某次实验数据记录在图乙中.
①为“验证力的平行四边形定则”,请按实验要求在图乙中完成作图;
②结合图乙,分析实验过程与结果,请至少给出一个方案以减少该实验的实验误差:
________________________________________________________________________.
考点二:实验器材的改进
【知识思维方法技巧】
(1)合力的改进:橡皮筋伸长到同一位置→钩码(重物)的重力不变
(2)分力的改进:弹簧测力计示数→
(3)力的大小创新:弹簧测力计的示数→橡皮筋长度的变化
题型一:应用钩码的重力进行探究
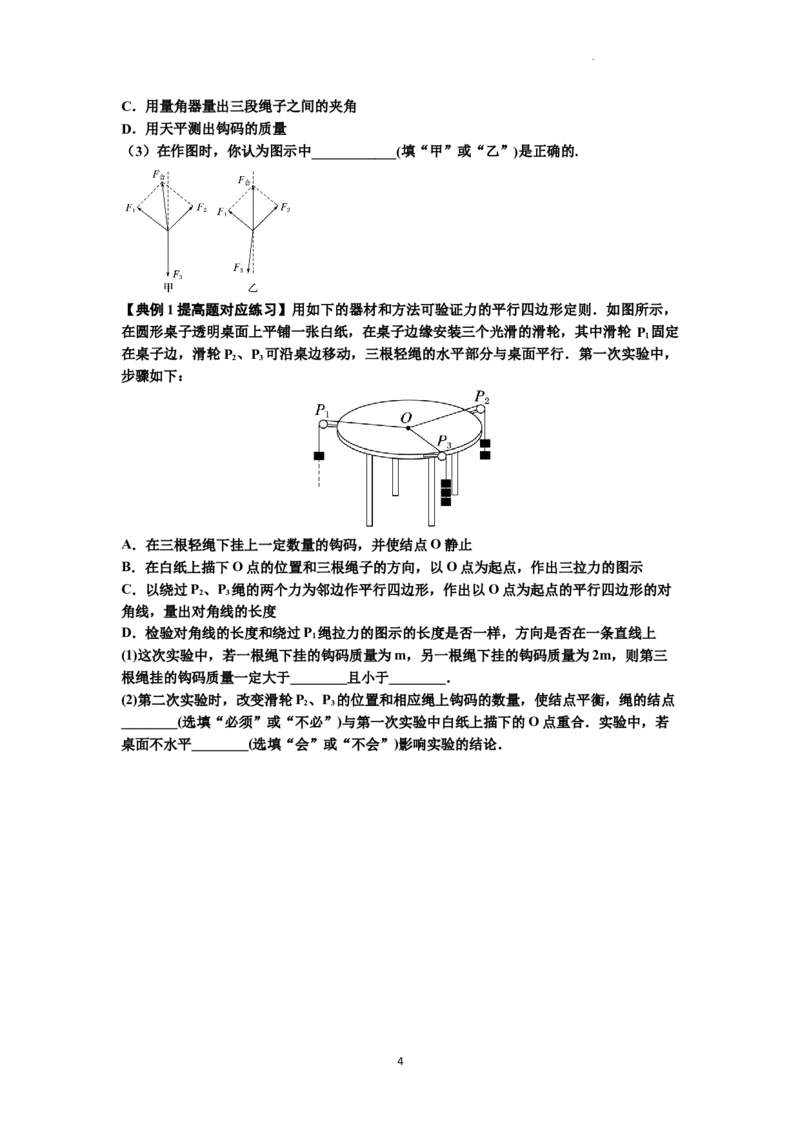
【典例1提高题】有同学利用如图所示的装置来验证力的平行四边形定则:在竖直木板上
铺有白纸,固定两个光滑的滑轮A和B,将绳子打一个结点O,每个钩码的重量相等,当
系统达到平衡时,根据钩码个数读出三根绳子的拉力F、F 和F,回答下列问题:
1 2 3
(1)改变钩码个数,实验能完成的是____________(填正确答案标号).
A.钩码的个数N=N=2,N=4 B.钩码的个数N=N=3,N=4
1 2 3 1 3 2
C.钩码的个数N=N=N=4 D.钩码的个数N=3,N=4,N=5
1 2 3 1 2 3
(2)在拆下钩码和绳子前,最重要的一个步骤是____________(填选项前字母).
A.标记结点O的位置,并记录OA、OB、OC三段绳子的方向
B.量出OA、OB、OC三段绳子的长度
3
学科网(北京)股份有限公司C.用量角器量出三段绳子之间的夹角
D.用天平测出钩码的质量
(3)在作图时,你认为图示中____________(填“甲”或“乙”)是正确的.
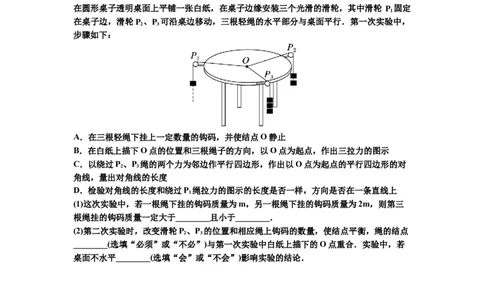
【典例1提高题对应练习】用如下的器材和方法可验证力的平行四边形定则.如图所示,
在圆形桌子透明桌面上平铺一张白纸,在桌子边缘安装三个光滑的滑轮,其中滑轮 P 固定
1
在桌子边,滑轮P 、P 可沿桌边移动,三根轻绳的水平部分与桌面平行.第一次实验中,
2 3
步骤如下:
A.在三根轻绳下挂上一定数量的钩码,并使结点O静止
B.在白纸上描下O点的位置和三根绳子的方向,以O点为起点,作出三拉力的图示
C.以绕过P、P 绳的两个力为邻边作平行四边形,作出以O点为起点的平行四边形的对
2 3
角线,量出对角线的长度
D.检验对角线的长度和绕过P 绳拉力的图示的长度是否一样,方向是否在一条直线上
1
(1)这次实验中,若一根绳下挂的钩码质量为m,另一根绳下挂的钩码质量为2m,则第三
根绳挂的钩码质量一定大于________且小于________.
(2)第二次实验时,改变滑轮P、P 的位置和相应绳上钩码的数量,使结点平衡,绳的结点
2 3
________(选填“必须”或“不必”)与第一次实验中白纸上描下的O点重合.实验中,若
桌面不水平________(选填“会”或“不会”)影响实验的结论.
4
学科网(北京)股份有限公司题型二:应用橡皮筋进行探究
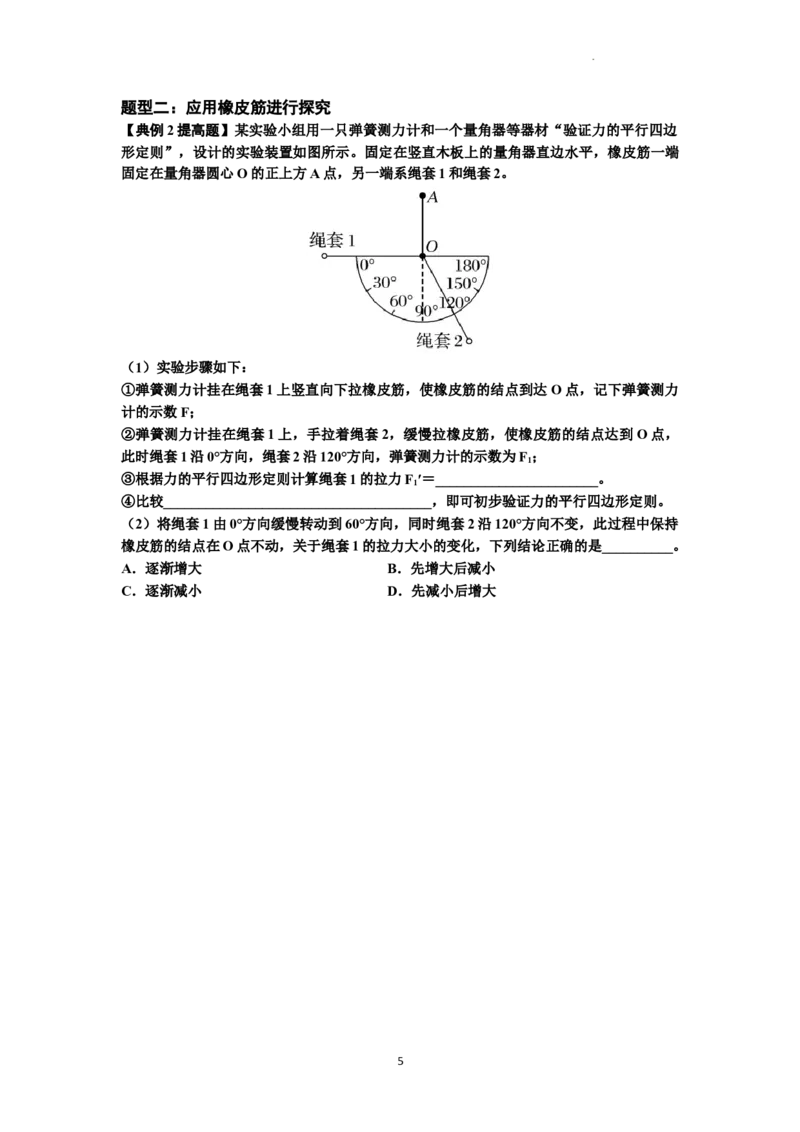
【典例2提高题】某实验小组用一只弹簧测力计和一个量角器等器材“验证力的平行四边
形定则”,设计的实验装置如图所示。固定在竖直木板上的量角器直边水平,橡皮筋一端
固定在量角器圆心O的正上方A点,另一端系绳套1和绳套2。
(1)实验步骤如下:
①弹簧测力计挂在绳套1上竖直向下拉橡皮筋,使橡皮筋的结点到达O点,记下弹簧测力
计的示数F;
②弹簧测力计挂在绳套1上,手拉着绳套2,缓慢拉橡皮筋,使橡皮筋的结点达到O点,
此时绳套1沿0°方向,绳套2沿120°方向,弹簧测力计的示数为F;
1
③根据力的平行四边形定则计算绳套1的拉力F′=_______________________。
1
④比较______________________________________,即可初步验证力的平行四边形定则。
(2)将绳套1由0°方向缓慢转动到60°方向,同时绳套2沿120°方向不变,此过程中保持
橡皮筋的结点在O点不动,关于绳套1的拉力大小的变化,下列结论正确的是__________。
A.逐渐增大 B.先增大后减小
C.逐渐减小 D.先减小后增大
5
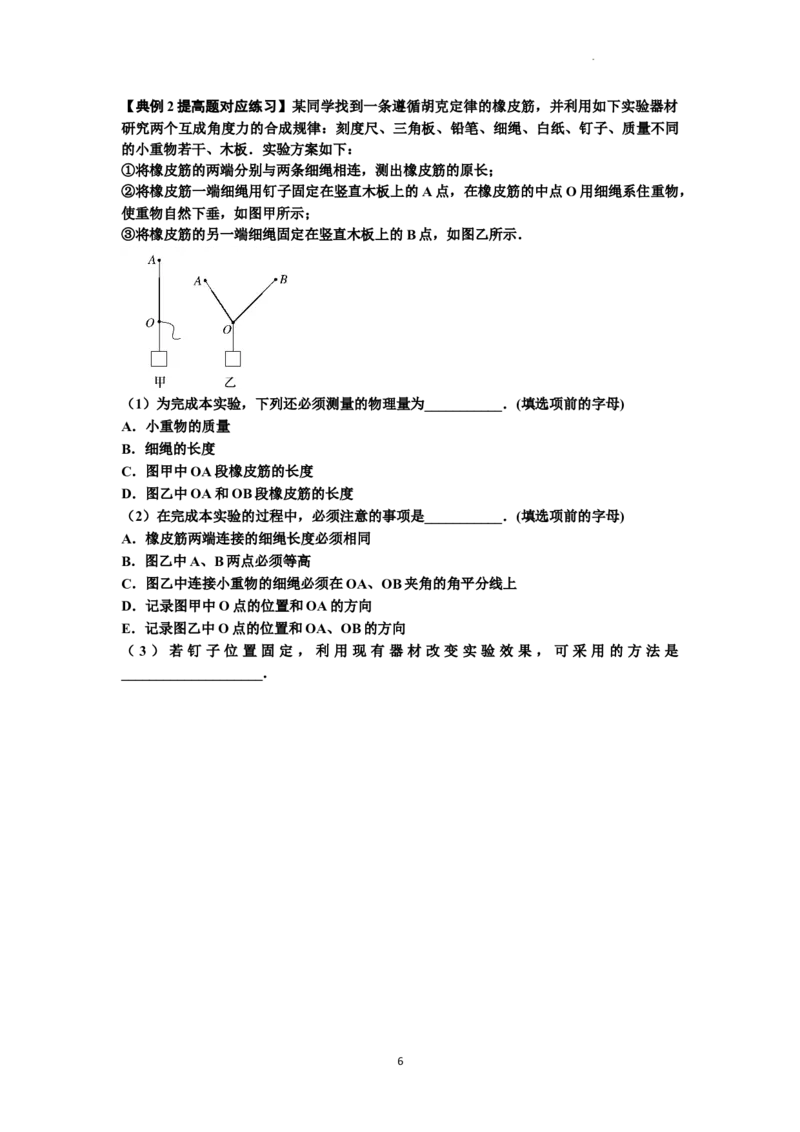
学科网(北京)股份有限公司【典例2提高题对应练习】某同学找到一条遵循胡克定律的橡皮筋,并利用如下实验器材
研究两个互成角度力的合成规律:刻度尺、三角板、铅笔、细绳、白纸、钉子、质量不同
的小重物若干、木板.实验方案如下:
①将橡皮筋的两端分别与两条细绳相连,测出橡皮筋的原长;
②将橡皮筋一端细绳用钉子固定在竖直木板上的A点,在橡皮筋的中点O用细绳系住重物,
使重物自然下垂,如图甲所示;
③将橡皮筋的另一端细绳固定在竖直木板上的B点,如图乙所示.
(1)为完成本实验,下列还必须测量的物理量为___________.(填选项前的字母)
A.小重物的质量
B.细绳的长度
C.图甲中OA段橡皮筋的长度
D.图乙中OA和OB段橡皮筋的长度
(2)在完成本实验的过程中,必须注意的事项是___________.(填选项前的字母)
A.橡皮筋两端连接的细绳长度必须相同
B.图乙中A、B两点必须等高
C.图乙中连接小重物的细绳必须在OA、OB夹角的角平分线上
D.记录图甲中O点的位置和OA的方向
E.记录图乙中O点的位置和OA、OB的方向
( 3 ) 若 钉 子 位 置 固 定 , 利 用 现 有 器 材 改 变 实 验 效 果 , 可 采 用 的 方 法 是
____________________.
6
学科网(北京)股份有限公司题型三:应用力传感器(弹簧测力计)进行探究
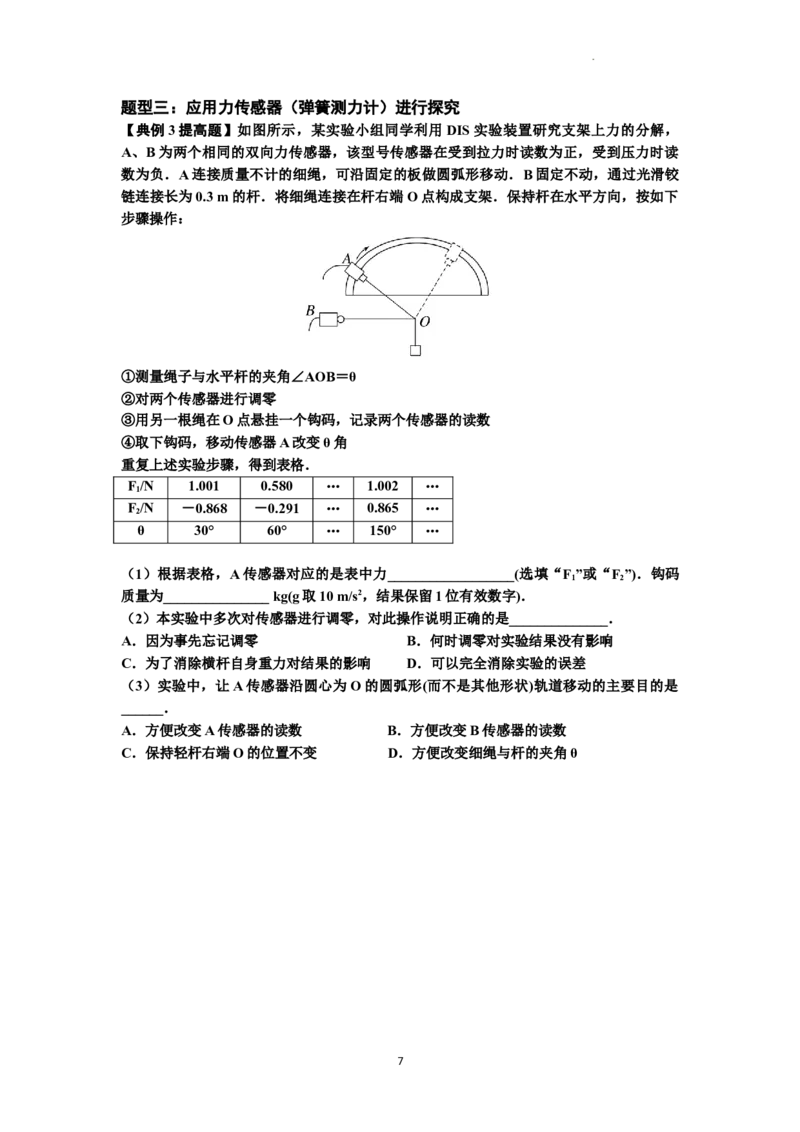
【典例3提高题】如图所示,某实验小组同学利用DIS实验装置研究支架上力的分解,
A、B为两个相同的双向力传感器,该型号传感器在受到拉力时读数为正,受到压力时读
数为负.A连接质量不计的细绳,可沿固定的板做圆弧形移动.B固定不动,通过光滑铰
链连接长为0.3 m的杆.将细绳连接在杆右端O点构成支架.保持杆在水平方向,按如下
步骤操作:
①测量绳子与水平杆的夹角∠AOB=θ
②对两个传感器进行调零
③用另一根绳在O点悬挂一个钩码,记录两个传感器的读数
④取下钩码,移动传感器A改变θ角
重复上述实验步骤,得到表格.
F/N 1.001 0.580 … 1.002 …
1
F/N -0.868 -0.291 … 0.865 …
2
θ 30° 60° … 150° …
(1)根据表格,A传感器对应的是表中力__________________(选填“F”或“F”).钩码
1 2
质量为_______________ kg(g取10 m/s2,结果保留1位有效数字).
(2)本实验中多次对传感器进行调零,对此操作说明正确的是______________.
A.因为事先忘记调零 B.何时调零对实验结果没有影响
C.为了消除横杆自身重力对结果的影响 D.可以完全消除实验的误差
(3)实验中,让A传感器沿圆心为O的圆弧形(而不是其他形状)轨道移动的主要目的是
______.
A.方便改变A传感器的读数 B.方便改变B传感器的读数
C.保持轻杆右端O的位置不变 D.方便改变细绳与杆的夹角θ
7
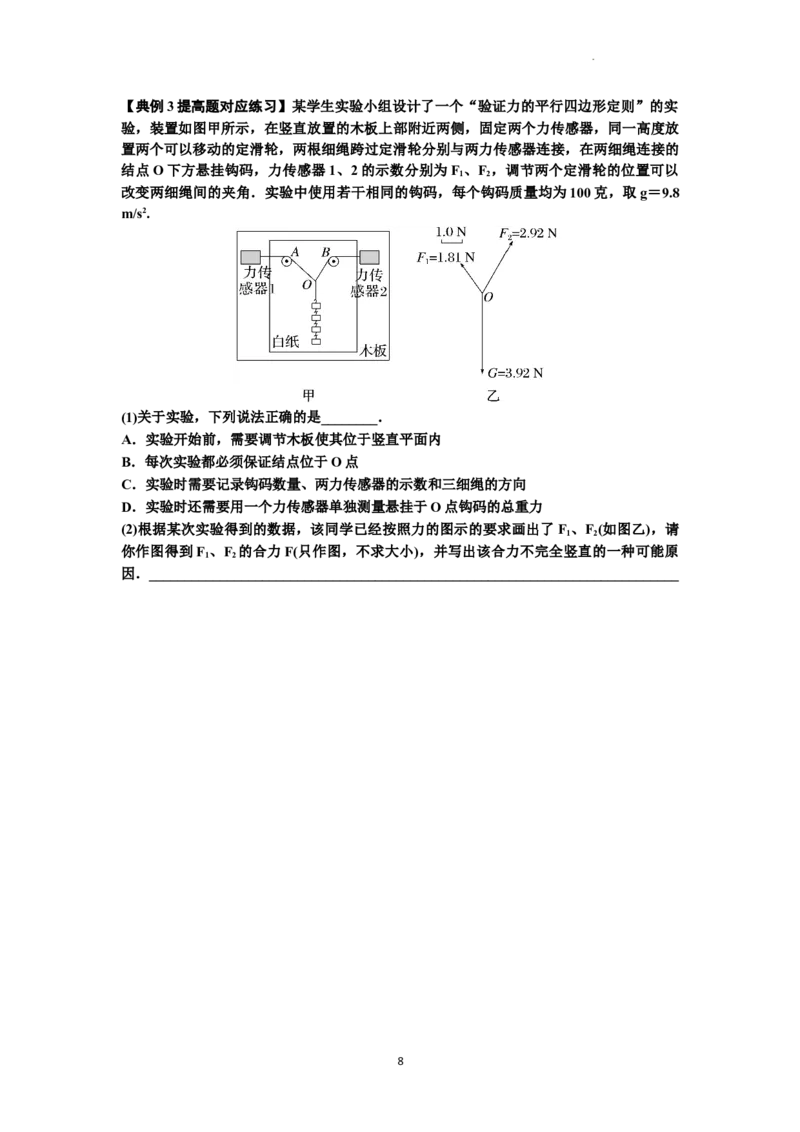
学科网(北京)股份有限公司【典例3提高题对应练习】某学生实验小组设计了一个“验证力的平行四边形定则”的实
验,装置如图甲所示,在竖直放置的木板上部附近两侧,固定两个力传感器,同一高度放
置两个可以移动的定滑轮,两根细绳跨过定滑轮分别与两力传感器连接,在两细绳连接的
结点O下方悬挂钩码,力传感器1、2的示数分别为F 、F ,调节两个定滑轮的位置可以
1 2
改变两细绳间的夹角.实验中使用若干相同的钩码,每个钩码质量均为100克,取g=9.8
m/s2.
(1)关于实验,下列说法正确的是________.
A.实验开始前,需要调节木板使其位于竖直平面内
B.每次实验都必须保证结点位于O点
C.实验时需要记录钩码数量、两力传感器的示数和三细绳的方向
D.实验时还需要用一个力传感器单独测量悬挂于O点钩码的总重力
(2)根据某次实验得到的数据,该同学已经按照力的图示的要求画出了F 、F(如图乙),请
1 2
你作图得到F 、F 的合力F(只作图,不求大小),并写出该合力不完全竖直的一种可能原
1 2
因.___________________________________________________________________________
8
学科网(北京)股份有限公司

