 夜雨聆风
夜雨聆风





Stateflow在汽车软件开发中的应用
一、Stateflow技术基础与有限状态机理论
1.1 有限状态机的数学原理
有限状态机(Finite State Machine, FSM)是一种形式化的计算模型,由五个要素构成:有限的状态集合、输入字母表、输出字母表、状态转移函数和初始状态。在汽车控制系统中,状态机用于描述具有离散状态的动态系统行为。
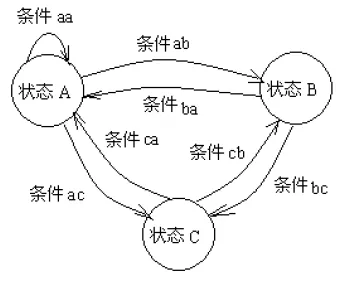
状态机的基本要素包括:
状态:系统在特定时刻所处的模式或条件,如”运行”、”待机”、”故障”
转移:状态之间的切换路径,由事件和条件触发
事件:来自系统内部或外部的触发信号
条件:转移发生的布尔表达式
动作:进入、退出状态或转移过程中执行的操作
1.2 Stateflow的架构特点
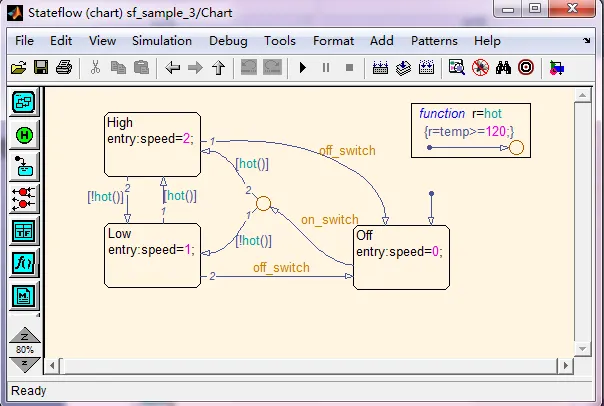
Stateflow是MathWorks公司开发的基于状态图的建模环境,与Simulink深度集成。其主要技术特点包括:
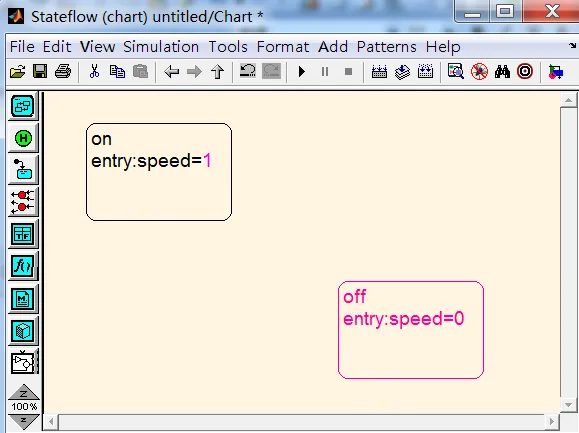
层次化状态管理:支持状态嵌套,父状态可以包含子状态,形成树状结构。这种结构符合汽车电子系统的层级化设计思想,从整车级状态到子系统级状态再到组件级状态,形成完整的状态层次。
并行状态执行:多个状态可以同时处于激活状态,每个并行状态机独立运行。这在汽车控制系统中特别重要,例如动力系统控制、车身控制、信息娱乐系统可以并行运行,互不干扰。
事件驱动机制:状态转移由事件触发,事件可以是时间事件、消息事件、数据事件等。在汽车系统中,事件包括传感器信号变化、CAN消息接收、定时器超时等。
图形化建模语言:通过状态图、流程图、真值表等多种图形化表示方法,使复杂逻辑直观可见,便于设计评审和团队协作。
二、汽车电子系统状态机设计原理
2.1 整车电源管理系统设计
整车电源管理系统是车辆电气架构的基础,负责管理车辆的电源状态和能量分配。典型的电源状态包括:
OFF状态:车辆完全断电,仅保留必要的防盗和遥控功能。从OFF状态转移到ACC状态需要检测到合法的钥匙信号。
ACC状态:附件供电状态,为信息娱乐系统、电动车窗、中控锁等附件供电。在此状态下,仪表盘可能部分点亮,但动力系统不工作。
IG_ON状态:点火开关接通状态,全车电子系统供电。在此状态下,发动机控制单元、变速箱控制单元等关键ECU开始自检和初始化。
CRANK状态:启动状态,起动机工作带动发动机转动。从IG_ON状态转移到CRANK状态需要满足多个条件:刹车踏板踩下、变速箱处于P档或N档、电池电压正常。
READY状态:车辆可行驶状态,所有系统完成初始化,高压系统上电(新能源车辆),车辆准备就绪。
状态转移的设计要点包括条件检查、转移动作、状态进入和退出动作。例如,从OFF状态到ACC状态的转移条件包括:检测到钥匙信号、防盗系统认证通过。转移动作包括:接通ACC继电器、唤醒相关ECU网络。
2.2 故障诊断与跛行回家机制
汽车电子系统必须具备故障检测、处理和恢复能力。故障管理状态机设计遵循以下原则:
故障分级策略:将故障分为不同级别,对应不同的处理策略。一级故障为轻微故障,仅记录故障码,不影响系统功能。二级故障为中等故障,触发报警,系统功能降级。三级故障为严重故障,激活安全保护机制,可能强制系统关闭或进入最小风险状态。
故障检测机制:通过多种方法检测故障,包括范围检查(检查信号是否在合理范围内)、合理性检查(检查相关信号之间的一致性)、时间监控(检查信号更新是否及时)等。
跛行回家模式:当检测到严重故障时,系统进入跛行回家模式。在此模式下,非关键功能被关闭,关键功能以简化或降级的方式运行,确保车辆能够安全行驶到维修点。例如,发动机控制系统检测到氧传感器故障时,可能采用开环控制策略,使用预设的空燃比映射表。
故障恢复策略:包括自动恢复和手动恢复。自动恢复适用于瞬时性故障,当故障条件消失一段时间后,系统自动清除故障状态。手动恢复需要诊断工具干预,用于处理永久性故障。
三、Stateflow与Simulink的集成架构
3.1 数据流与控制流的协同设计
在汽车控制系统开发中,通常采用数据流和控制流分离的架构。Simulink擅长处理连续时间系统和信号处理算法,而Stateflow擅长处理离散事件和逻辑控制。
控制流设计模式:Stateflow作为系统的”大脑”,负责模式选择、状态管理和决策逻辑。它根据当前状态、输入事件和条件,决定系统的运行模式。例如,在自适应巡航控制系统中,Stateflow决定当前是处于”定速巡航”模式还是”跟车”模式。
数据流设计模式:Simulink作为系统的”执行器”,负责具体的算法计算。它接收Stateflow的模式选择指令,执行相应的控制算法,生成控制信号。例如,在”定速巡航”模式下执行PID控制算法,在”跟车”模式下执行模型预测控制算法。
接口设计规范:Stateflow和Simulink之间的接口需要明确定义。包括:Stateflow输出到Simulink的模式选择信号、使能信号、参数选择信号;Simulink输出到Stateflow的状态反馈信号、故障标志、性能指标等。接口数据应定义明确的数据类型、取值范围、更新周期。
3.2 事件与消息传递机制
在Stateflow中,事件是驱动状态转移的主要机制。汽车控制系统中的事件可以分为以下几类:
外部事件:来自车辆传感器、开关、按钮等物理输入的变化。例如,刹车踏板踩下事件、车门开关事件、钥匙位置变化事件。
内部事件:系统内部生成的事件。例如,定时器超时事件、计数达到阈值事件、内部标志变化事件。
通信事件:通过车载网络接收的消息。例如,CAN总线消息接收事件、LIN总线消息接收事件、以太网通信事件。
时间事件:基于时间触发的事件。包括周期性事件(每10ms触发一次)和绝对时间事件(在特定时间点触发)。
事件处理的设计要点包括事件优先级、事件队列管理、事件丢失处理。高优先级事件应优先处理,如安全相关的故障事件。事件队列应合理设计大小,防止事件堆积导致系统响应延迟。对于可能丢失的事件,应有相应的处理策略。
四、AUTOSAR标准下的状态机设计
4.1 AUTOSAR软件组件建模规范
AUTOSAR(AUTomotive Open System ARchitecture)是汽车电子软件的标准架构。在AUTOSAR架构下,Stateflow用于实现软件组件(SWC)内部的运行实体(Runnable Entity)。
发送者-接收者接口:用于周期性或事件性数据传输。在Stateflow中,输入端口对应接收者接口,输出端口对应发送者接口。数据元素应有明确定义的数据类型、数据范围、数据单位。例如,车速信号定义为浮点型,单位为km/h,有效范围0-300km/h。
客户端-服务器接口:用于请求-响应式服务调用。在Stateflow中,客户端端口用于调用服务操作,服务器端口用于提供实现服务操作。服务接口应定义清晰的输入参数、输出参数、返回值和可能的错误码。
模式管理:AUTOSAR定义了模式管理机制,用于管理软件组件的运行模式。Stateflow状态机天然支持模式管理,每个状态对应一个模式,状态转移对应模式切换。模式切换应遵循定义的协议,包括同步切换、异步切换、模式确认等。
可运行实体调度:Stateflow图表对应AUTOSAR的一个或多个可运行实体。每个可运行实体有定义的触发事件(周期触发、数据接收触发、模式切换触发等)和调度周期。状态机内部的动作应在允许的时间窗口内完成,避免超时影响系统实时性。
4.2 代码生成配置与优化
Embedded Coder是MATLAB/Simulink的代码生成工具,可将Stateflow模型转换为C代码。代码生成配置需要考虑以下几个方面:
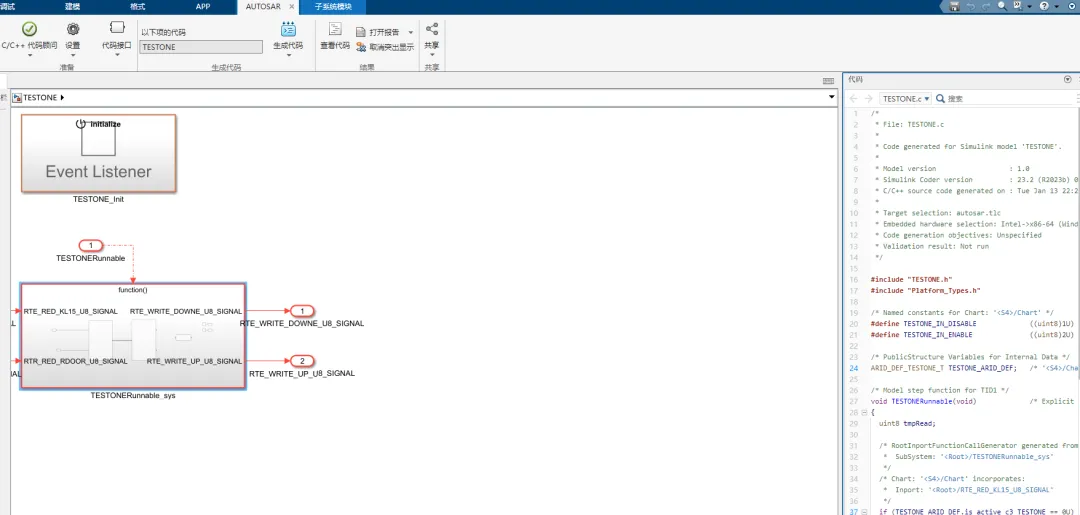
存储类配置:定义数据在生成的代码中的存储方式。包括自动存储(局部变量)、静态存储(静态变量)、外部存储(全局变量)。状态变量通常配置为静态存储,保持状态持久性。输入输出变量通常配置为外部存储,供RTE访问。
数据类型配置:定义生成代码中使用的数据类型。应使用标准C数据类型(如uint8_t、int16_t、float32_t)或自定义类型。避免使用平台相关的数据类型,确保代码可移植性。
代码优化选项:包括执行效率优化和内存使用优化。执行效率优化包括内联小函数、循环展开、常量传播等。内存使用优化包括共享临时变量、压缩数据结构、使用位域存储状态等。
AUTOSAR特定配置:包括AUTOSAR代码生成模式、RTE接口生成、SWC描述文件生成等。生成的代码应符合AUTOSAR C++14编码规范,包括命名规范、注释规范、错误处理规范等。
五、功能安全设计与ISO 26262合规性
5.1 安全相关的状态机设计原则
ISO 26262是汽车功能安全标准,对安全相关的电子系统开发提出了严格要求。在Stateflow设计中,应考虑以下安全原则:
失效模式与影响分析:在设计阶段识别状态机可能的失效模式,包括状态卡死、状态误转移、状态丢失等。对每个失效模式分析其影响,确定ASIL(汽车安全完整性等级)等级。
安全机制设计:为每个失效模式设计相应的安全机制。例如,对于状态卡死失效,设计看门狗机制定期检查状态机是否正常运行。对于状态误转移失效,设计转移条件校验机制,确保转移条件合理。
安全状态定义:定义系统的安全状态,当检测到危险故障时,系统应能在规定时间内进入安全状态。安全状态应是确定的、可达到的、风险最低的状态。
故障检测与处理:设计故障检测机制,包括输入数据合理性检查、内部状态一致性检查、执行结果有效性检查。故障处理机制包括故障记录、故障通知、故障恢复或系统降级。
5.2 多样化设计与冗余机制
对于高安全完整性等级(ASIL C/D)的系统,常采用多样化设计或冗余设计提高安全性。
多样化设计:使用不同的设计方法或实现技术实现相同的功能,减少共性原因失效。例如,主控制通道使用Stateflow实现状态机,监控通道使用传统的C代码实现简化版本的状态机,两者定期比较输出的一致性。
冗余设计:通过硬件或软件冗余,提高系统的可靠性。包括双通道设计(两个相同的通道,通过比较器或表决器输出)、三模冗余设计(三个相同的通道,多数表决输出)、冷备份设计(主通道工作,备通道待机,主通道失效时切换)等。
监控机制:设计独立的监控单元,监控主控制单元的运行状态。监控内容包括程序流监控(检查程序执行顺序是否正确)、时间监控(检查任务是否按时完成)、数据监控(检查数据是否在合理范围内)。
安全库函数使用:使用经过安全认证的库函数,如安全数学库(避免除零、溢出等错误)、安全内存管理库(避免内存泄漏、越界访问)、安全通信库(确保通信完整性、机密性)。
六、测试与验证方法论
6.1 基于模型的测试策略
在模型设计阶段进行充分的测试,可以早期发现设计缺陷,降低开发成本。基于模型的测试包括以下几个层次:
单元测试:针对单个状态机或状态机内部单元的测试。测试内容包括状态转移测试(测试所有可能的状态转移)、状态保持测试(测试状态在满足条件时是否保持不变)、边界条件测试(测试边界条件下的行为)。
集成测试:测试多个状态机之间的交互,或状态机与Simulink模型之间的交互。测试内容包括接口测试(测试接口数据的正确传输)、时序测试(测试时序要求是否满足)、并发测试(测试并行状态机的协同工作)。
系统测试:在完整的系统环境中测试状态机的功能。测试内容包括功能测试(测试所有功能需求是否满足)、性能测试(测试时间性能、资源使用等)、鲁棒性测试(测试异常输入、故障注入等情况下的行为)。
自动化测试框架:使用Simulink Test等工具建立自动化测试框架。包括测试用例管理、测试执行自动化、测试结果分析、测试报告生成。自动化测试框架支持回归测试,在模型修改后自动执行测试用例,确保修改不引入新的缺陷。
6.2 形式化验证与模型检查
对于安全关键系统,除了测试外,还应采用形式化方法验证模型的正确性。
需求形式化:将自然语言描述的需求转换为形式化的规约,如时态逻辑公式。形式化的需求无二义性,可用于自动化验证。
模型验证:使用模型检查工具,验证状态机模型是否满足形式化规约。模型检查可以穷举所有可能的状态和输入,确保不存在违反规约的情况。常见的模型检查工具包括Simulink Design Verifier、NuSMV等。
定理证明:对于复杂的性质,可以使用定理证明器进行证明。定理证明需要人工指导,但可以处理无限状态系统。常用于验证算法正确性、安全性质等。
覆盖率分析:分析测试用例对模型的覆盖程度。包括状态覆盖率(所有状态是否都被访问)、转移覆盖率(所有转移是否都被执行)、条件覆盖率(所有条件的真假组合是否都被覆盖)、MC/DC覆盖率(修改条件判定覆盖率)。覆盖率分析可以识别测试的不足,指导测试用例补充。
七、性能优化与资源管理
7.1 执行效率优化技术
状态机的执行效率直接影响系统的实时性能。优化技术包括:
状态编码优化:状态变量可以使用不同的编码方式,包括顺序编码、一位热编码、稀疏编码等。顺序编码使用连续整数表示状态,存储空间小,但状态判断需要比较运算。一位热编码每个状态使用一个位表示,状态判断速度快,但存储空间大。稀疏编码是折中方案,兼顾速度和空间。
转移表优化:状态转移可以表示为转移表,表中的每一项对应一个转移。转移表的查找速度影响状态机的响应时间。对于状态数少的情况,可以使用线性查找。对于状态数多的情况,可以使用二分查找或哈希查找。
事件处理优化:事件处理是状态机的主要开销之一。优化技术包括事件合并(将多个相关事件合并为一个复合事件)、事件过滤(过滤掉不必要的低优先级事件)、事件队列优化(使用高效的队列数据结构)。
条件求值优化:转移条件的求值可能涉及复杂计算。优化技术包括条件缓存(缓存不变的或变化缓慢的条件值)、条件简化(通过布尔代数简化复杂条件表达式)、惰性求值(只在必要时求值条件)。
7.2 内存使用优化策略
嵌入式系统通常内存资源有限,需要优化状态机的内存使用。
数据存储优化:合理选择数据的存储位置。频繁访问的数据放在快速内存中,不频繁访问的数据放在低速内存中。临时数据使用栈存储,持久数据使用静态存储。
数据结构优化:使用紧凑的数据结构。例如,使用位域存储多个布尔标志,使用枚举类型代替字符串常量,使用固定大小数组代替动态数组。
代码段优化:优化生成代码的大小。包括函数内联(将小函数内联展开,减少函数调用开销)、死代码消除(删除不会执行到的代码)、常量传播(在编译时计算常量表达式)。
运行时内存管理:避免动态内存分配,因为动态内存分配可能导致内存碎片和分配失败。使用静态内存池或预分配的内存块。如果需要动态内存,使用内存池管理,避免频繁的分配释放。
八、开发流程与团队协作规范
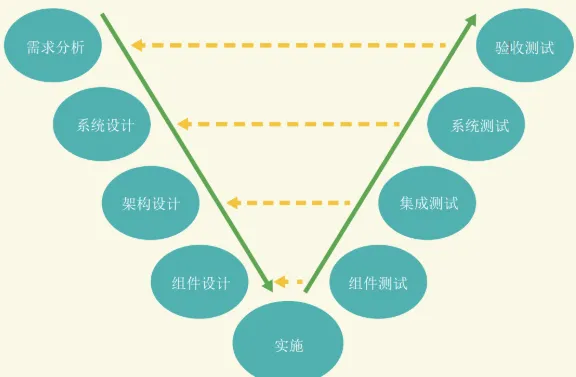
8.1 基于模型的V流程开发
基于Stateflow的汽车软件开发通常遵循V流程,包括需求分析、系统设计、软件设计、单元实现、单元测试、集成测试、系统测试、验收测试。
需求分析阶段:将用户需求和技术需求转化为形式化的模型需求。需求应可验证、可追溯。在Stateflow中,需求可以通过需求链接功能与模型元素关联。
系统设计阶段:设计系统的架构,包括功能分解、接口定义、通信协议。在Stateflow中,通过子系统划分、模型引用、接口定义实现系统架构。
软件设计阶段:详细设计每个软件组件的内部逻辑。在Stateflow中,通过状态机设计实现组件逻辑。设计应遵循设计原则,如高内聚、低耦合、单一职责原则。
单元实现阶段:通过Stateflow建模实现设计。建模应遵循建模规范,包括命名规范、注释规范、复杂度控制。模型应通过模型审查,确保质量。
单元测试阶段:对每个状态机进行单元测试。包括功能测试、边界测试、异常测试。测试应覆盖所有状态、转移、条件。测试结果应记录,问题应跟踪解决。
集成测试阶段:将多个状态机集成,测试它们之间的交互。包括接口测试、时序测试、并发测试。集成问题应分析原因,修改设计或实现。
系统测试阶段:在完整的系统环境中测试。包括功能测试、性能测试、鲁棒性测试、可靠性测试。系统测试通常使用硬件在环或车辆测试。
验收测试阶段:最终用户验证系统是否满足需求。包括用户场景测试、用户体验测试、合规性测试。
8.2 团队协作与版本管理
在团队开发环境中,Stateflow模型需要有效的版本管理和协作机制。
模型架构管理:大型系统通常分解为多个子系统,每个子系统由一个团队负责。子系统之间通过明确定义的接口协作。模型架构应支持并行开发和独立测试。
数据字典管理:使用共享数据字典管理模型中的数据,包括信号、参数、数据类型。数据字典确保数据定义的一致性,便于团队协作。数据字典应版本控制,变更应有记录。
版本控制集成:Stateflow模型应纳入版本控制系统(如Git、SVN)。版本控制不仅管理模型文件,也管理相关的数据文件、脚本文件、文档文件。版本控制策略包括分支策略、合并策略、标签策略。
模型比较与合并:使用模型比较工具比较不同版本的模型差异。模型合并应小心谨慎,特别是对自动生成的代码部分的合并。复杂合并可能需要手动解决冲突。
持续集成:建立持续集成环境,自动构建模型、生成代码、运行测试。持续集成及早发现集成问题,提高开发效率。持续集成应包括模型语法检查、模型标准检查、模型测试执行、代码生成验证。
文档与知识管理:模型应有充分的文档,包括设计文档、接口文档、测试文档。文档应与模型同步更新。团队应建立知识库,积累最佳实践、常见问题、解决方案。
随着汽车电子电气架构向集中化、智能化、网联化发展,状态机在汽车软件中的作用将更加重要。Stateflow作为成熟的商业工具,将在标准化、集成化、智能化方面持续发展,支持更复杂、更安全、更智能的汽车系统开发。汽车软件开发工程师需要深入理解状态机理论,掌握Stateflow等工具,遵循工程实践,才能开发出高质量、高可靠的汽车软件系统
———–嵌入式学新社———–

王老师的小程序👇👇点击即达!!!
扫码直接进入汽车嵌入式交流群
