 夜雨聆风
夜雨聆风





2026汽车软件面试必备:用CANoe打开总线的“黑盒”,你准备好了吗?
2026年的今天,软件定义汽车已不再是一个前瞻性的概念,而是实实在在的产业现实。当你打开主流招聘网站,搜索“汽车软件工程师”、“测试工程师”或“嵌入式开发”等岗位时,一个工具的出场频率高得惊人——CANoe。
无论是传统主机厂还是头部造车新势力,在任职要求中几乎都会明确写道:“熟练使用CANoe进行总线仿真、测试和分析”。它就像是汽车电子工程师的“听诊器”和“万用表”,甚至是整个车载网络的“X光机”。在面试中,关于CANoe的理解和使用经验,往往是衡量一个候选人是否具备实战能力的关键标尺。
然而,对于很多刚入行或准备转入汽车软件领域的朋友来说,CANoe复杂的界面、众多的术语以及“仿真”、“测量”、“数据库”等概念,常常让人望而生畏。它究竟是如何工作的?那些看起来密密麻麻的窗口到底在传达什么信息?
第一章:初窥门径——CAN总线的“娱乐与车身”仿真
让我们从最经典的CAN总线开始。CAN(控制器局域网络)作为车载网络的老将,至今仍是车身控制、动力传动等领域的中流砥柱。
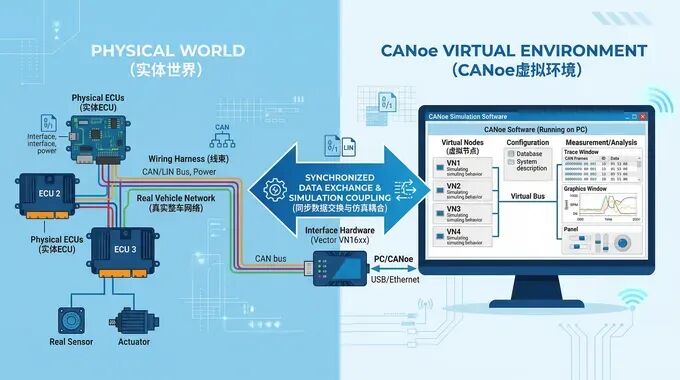
打开CANoe自带的 easy.cfg 项目,你看到的不仅是一个示例,更是一个微缩的“数字孪生”世界。这是一个全仿真的项目,模拟了娱乐域和车身域的交互:想象一下,你转动车钥匙(点火),踩下油门(加速),仪表盘指针随之摆动,同时车灯控制也响应变化。在真实物理世界中,这需要复杂的线束和多个物理ECU(电子控制单元)。但在CANoe中,这一切都运行在软件里。
1. 仿真的本质:虚拟的演员与剧本
切换到 Simulation Setup(仿真设置)窗口,你会看到一条CAN通道上连接着三个节点:Engine(发动机)、Light(车灯)和Display(仪表)。这就像是一个舞台,每个节点都是一个演员。它们的“台词”和“动作”,也就是ECU的行为逻辑,是由背后的CAPL语言编写的程序决定的。
对于初学者来说,可以暂时将CAPL理解为一种让虚拟ECU知道“当收到什么指令时,该发送什么报文”的剧本。在这个阶段,我们不需要关心剧本怎么写,只需要明白,仿真节点是数据的源头。
2. 测量的艺术:从“是什么”到“为什么”
如果说仿真是模拟现实,那么测量就是观察现实。Measurement Setup(测量设置)窗口是整个工具链的“流水线”。
- 数据源
数据从哪里来?可以是仿真节点(Online),也可以是之前录好的文件(Offline),或者是真实的硬件接口(如VN1630A)。 - 过滤器
总线上数据繁多,就像在嘈杂的集市里听清特定两个人的对话。过滤器的作用就是只留下你关心的那部分数据。 - 分析窗口
经过过滤的数据,最终要呈现在工程师面前。这就是Trace窗口、Graphics窗口、Data窗口等的价值。
3. 实战视角:如何检查一个“故障”?
运行项目后,操作Control面板上的点火开关和加速滑块,你会发现:
- Trace窗口
(追踪窗口)像水一样流过一行行数据。这里记录着总线上发生的每一个活动:谁发了报文,报文ID是多少,数据字节是什么。如果你加载了DBC数据库文件(相当于报文的“翻译词典”),Trace窗口就会把冰冷的十六进制数据“翻译”成“发动机转速:1500 rpm”这样看得懂的语言。 - Graphics窗口
(图形窗口)则将车速信号 EngineSpeed的变化绘制成一条平滑的曲线。如果信号出现了跳变或异常,曲线会立刻显现出“毛刺”。
在实际车载测试中,这种工作模式对应着两种典型场景:一是“操作——观察——检查”,比如按下一键启动,看仪表是否亮起,同时用CANoe检查对应的点火报文是否发送正确;二是“注入——验证”,比如用CANoe模拟发送一个超高的车速报文,看仪表盘是否会出现超速报警,以此验证仪表的容错机制。
第二章:进阶探索——车载以太网与ADAS的“高速公路”
随着智能网联汽车的普及,传统的CAN总线在带宽上已经捉襟见肘。摄像头、雷达、高精度地图导航产生的海量数据,需要一条更宽的信息高速公路——这就是车载以太网。
打开 EthernetSystem.cfg 项目,你会发现世界变得复杂而精彩。这里不再只是简单的灯和仪表,而是包含了远程雷达(LRR)、前向摄像头(CAMF)、ADAS控制器、音频放大器(AMP)和车机(HU)的完整系统。
1. 面向服务的通信(SOME/IP)

与CAN总线面向信号的通信方式不同,以太网通信更多是面向服务的。在Simulation Setup中,各个节点通过一个以太网交换机(VGW节点,即网关)相连。
以ADAS功能为例:雷达(LRR节点)检测到前方有障碍物,摄像头(CAMF节点)识别到车道线和限速标志。它们将这些原始数据发送给ADAS节点。ADAS节点作为“决策者”,进行融合计算后,可能需要向仪表(IC节点)发送一个报警信号,或者向底盘系统发送一个轻微的制动指令。
在这里,数据的载体不再是简单的CAN报文,而是基于SOME/IP协议的PDU(协议数据单元)。在Trace窗口中,你需要切换布局到“Ethernet Services”才能看到应用层的具体内容。面试中常问的“你如何分析SOME/IP通信?”,其实就是考察你是否知道在Trace窗口里观察服务的发现、订阅和通知过程。
2. 自动化测试的雏形
这个以太网项目中还隐藏着一个极具面试价值的模块:DriveCycle自动化执行界面。在实际开发中,我们不可能每次都手动操作面板去触发ADAS功能。通过编写自动化脚本,可以让CANoe自动执行一个预设的驾驶循环:启动车辆、加速、前方出现假车、AEB(自动紧急制动)触发。整个过程的数据流都会被记录下来,用于回归测试或问题复现。能够理解并搭建这种自动化测试流程,是从初级工程师向高级工程师迈进的重要一步。
第三章:精益求精——LIN总线的“肢体”控制
如果说CAN总线是汽车的神经系统主干,以太网是大脑(ADAS)的高速数据交换,那么LIN总线就是遍布全身的末梢神经。它成本低、速度慢,但足以胜任车门、车窗、后视镜、座椅调节这类对带宽要求不高的控制。
打开 LINSystem.cfg 项目,你可以看到对左前门(DWF_Left)、左后视镜(RVM_Left)等一系列从节点的精细仿真。
1. 主从架构的典型体现
LIN总线采用主从架构。在这个项目中,GWI节点(内部网关)作为主机节点,负责发送帧头,并决定何时让哪个从节点发送数据。
操作DoorOpener面板上的开关,你会发现Trace窗口中出现了 GWI_03 这样的报文。与CAN总线不同,LIN报文分为帧头(由主机发送)和应答(由主机或从机发送)两部分。你在Trace窗口中看到的,往往是包含实际数据的应答部分。通过加载LDF数据库文件,CANoe会帮你解析出 GWI_MirrorCommandLeft 这样的信号值。
2. 测试的颗粒度
这种精细化的控制测试,对车身电子工程师来说至关重要。面试中可能会被问到:“如果你发现左前门玻璃升降卡顿,你如何用CANoe排查?” 一个合格的工程师会想到:首先,操作开关,看LIN总线上的升窗指令报文是否发出;如果指令正常,可能是LIN执行器(电机)的问题;如果指令没有发出或错误,则可能是开关、线路或主机节点的问题。CANoe的作用,就是将这个故障边界清晰地划分出来。
结语:从工具的使用者到架构的思考者
回顾这三个范例,我们不难发现,CANoe之所以成为行业标准,并非因为它是一个简单的抓包工具,而是因为它提供了一个从需求分析、系统仿真、测试验证到故障诊断的全流程闭环。
对于即将参加2026年面试的你来说,仅仅会说“我会用CANoe抓个log”已经远远不够。面试官期待看到的是:
- 你是否理解总线通信的本质?
(如:CAN的信号与以太网的服务有何不同) - 你是否掌握了解析数据的钥匙?
(如:DBC、ARXML、LDF文件的作用) - 你是否具备系统级的调试思维?
(如:如何隔离问题,如何设计测试用例)
而这一切技术能力的底层,都指向了一个共同的、更高阶的知识体系——AUTOSAR架构。CANoe的强大,很大程度上源于它对AUTOSAR标准的深度支持。无论是CAN的通信矩阵,还是以太网中复杂的SOME/IP配置,亦或是诊断协议(UDS on CAN/IP),其根本逻辑都遵循AUTOSAR的规范。当你能够站在AUTOSAR的高度去审视CANoe的操作时,你就不再只是一个工具的操作者,而是一个车载软件系统的思考者。
如果你想深入理解汽车软件背后的这套“宪法”与“民法典”,想知道ECU内部的RTE(运行时环境)是如何运行的,想知道如何像设计乐高积木一样设计整车软件架构,那么,不妨扫描下方二维码,加入我们的AUTOSAR课程。
在这里,我们将带你从0到1搭建符合AUTOSAR标准的ECU模型,打通从工具使用到架构设计的任督二脉。2026年,让我们一起,成为定义汽车的那个人。
|
扫描下方二维码,开启你的AUTOSAR架构师之路
|

面试
资料
学习
路线
学习
指导
多名10年+大厂经验
工程师在线指导
学习
交流
众多开发者一起交流
助力你提升技能