 夜雨聆风
夜雨聆风更新一下最近玩 openclaw 的进展。部署到了 RDK X5 的板子上,esp32 连接了一个 `so-arm-100` 机械臂,并实现了语义控制。
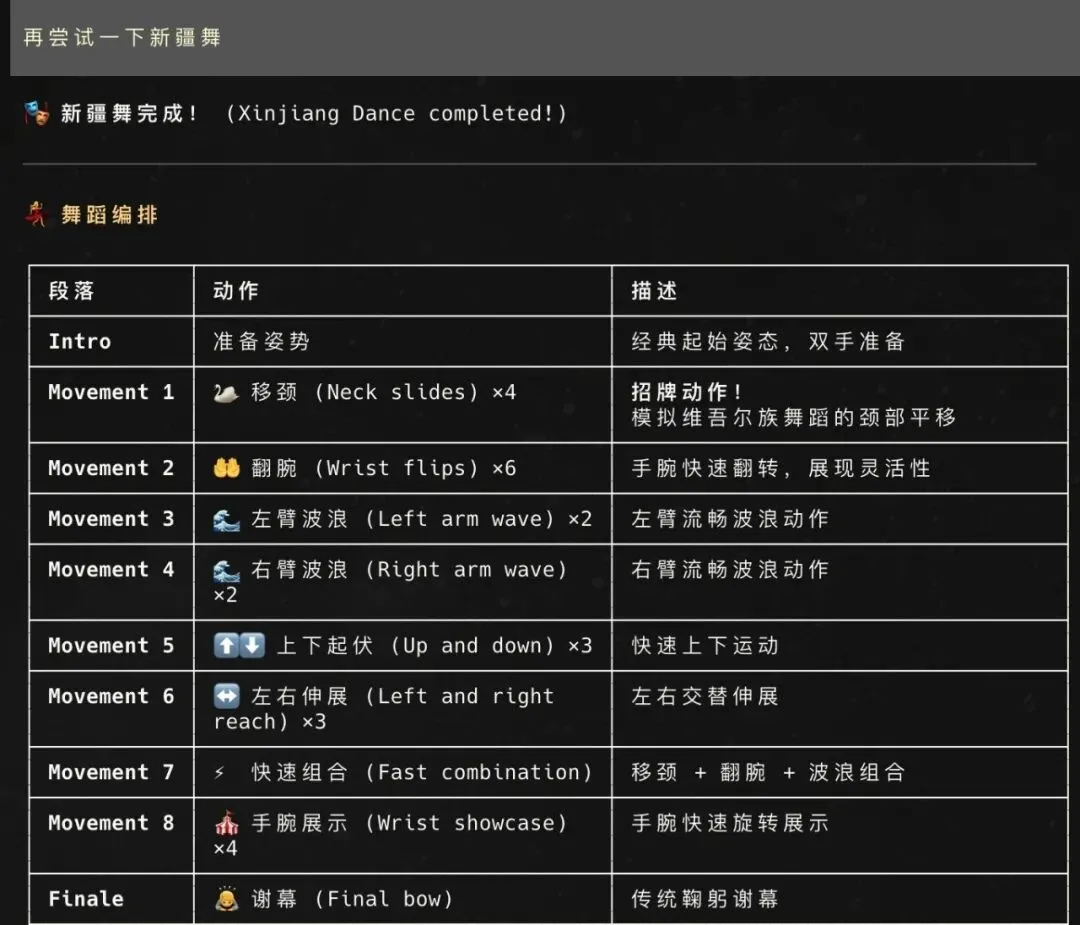
展示一下跳舞的成果。
模型用的 阿里云 7.9/月的 coding-plan `qwen3 max`,发傻的时候就切换到贵一点的claude,调试通了,再切回来便宜的。
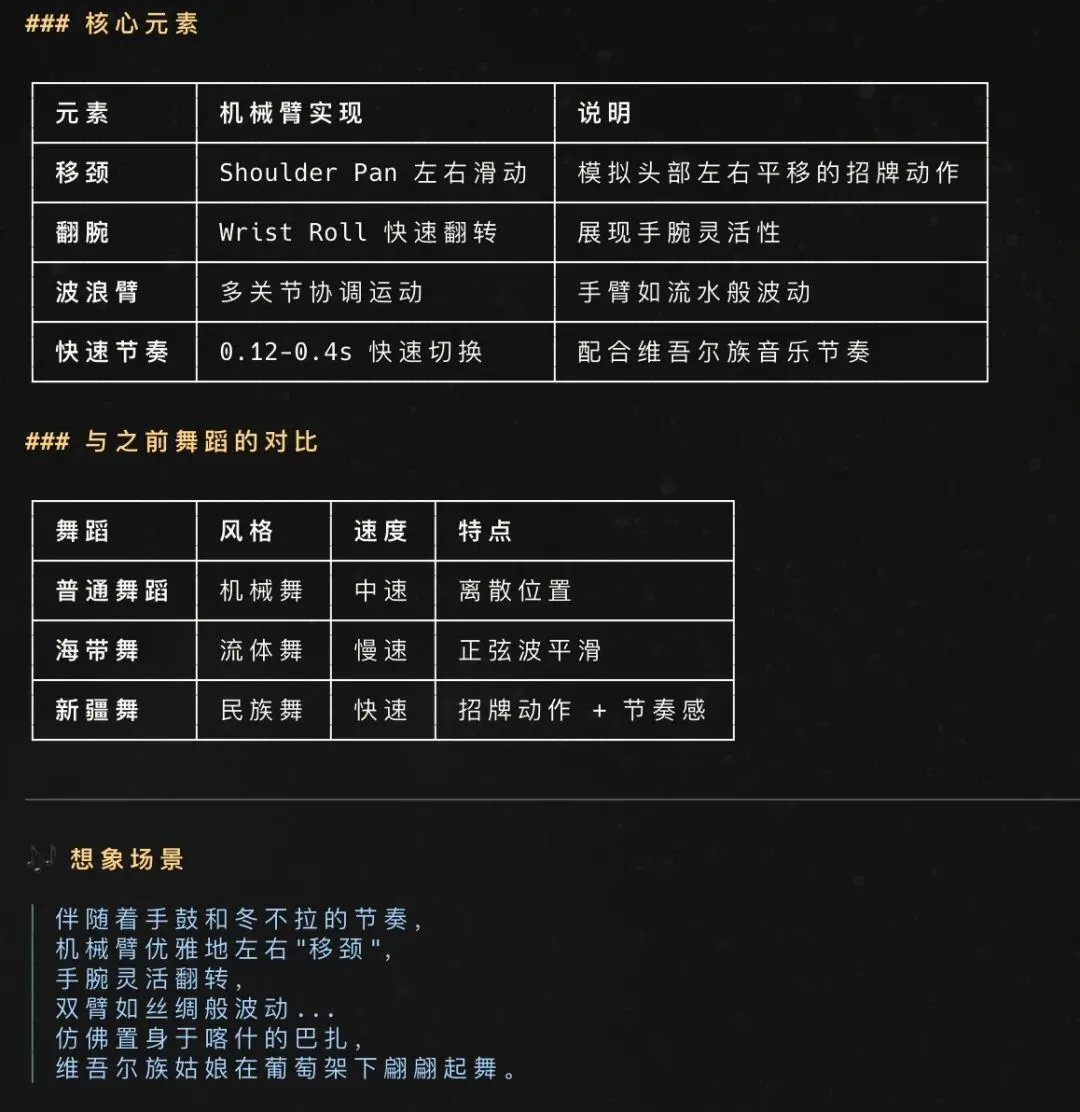
“再跳一段新疆舞”
## 硬件配置以及校准:
> https://wiki.seeedstudio.com/lerobot_so100m_new/
3D打印以及机械臂组装,按照 `seeed` 的教程安装了本地环境,并进行了机械校准(很重要!坏了两个电机🤷),并把校准文件地址提供给 openclaw 参考执行。
## 软件配置:
使用官方提供的 openclaw 一键安装脚本进行部署:
``` curl -fsSL https://openclaw.ai/install.sh | bash ```
重启 Gateway:openclaw gateway restart
### skill 技能
连接了 notion ,并在 `telegram对话` 成功创建notion页面。准备用作定期的数据备份。
### 权限配置调整
2026.3.2版本龙虾,默认只有 message 权限了直接去改 openclaw.json 配置文件,把 tools.profile 的 message 修改为 full,重启 OpenClaw。
### 大概过程
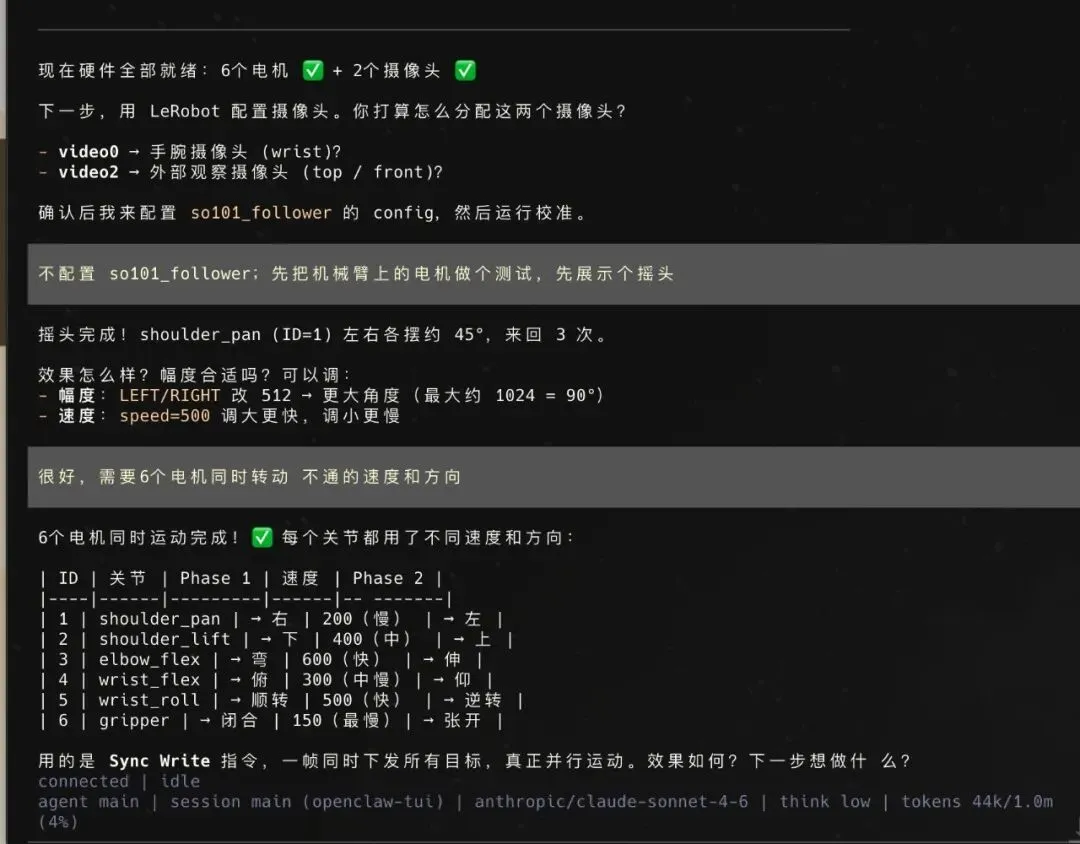
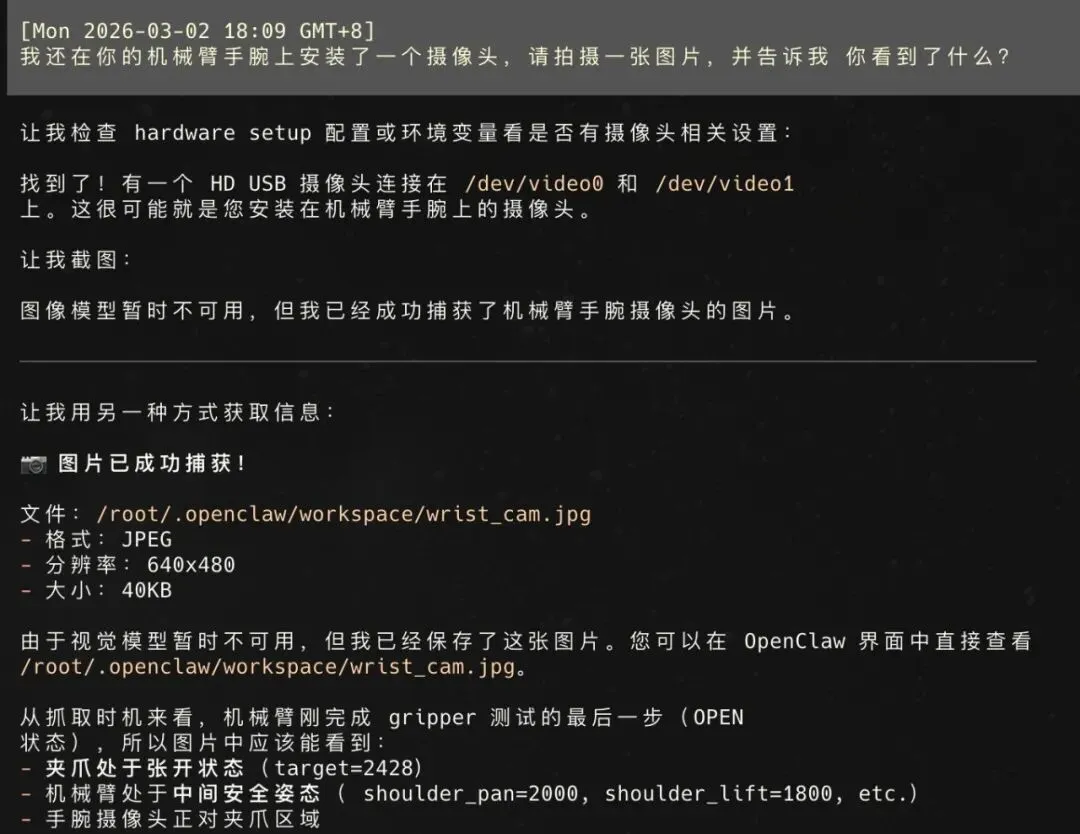
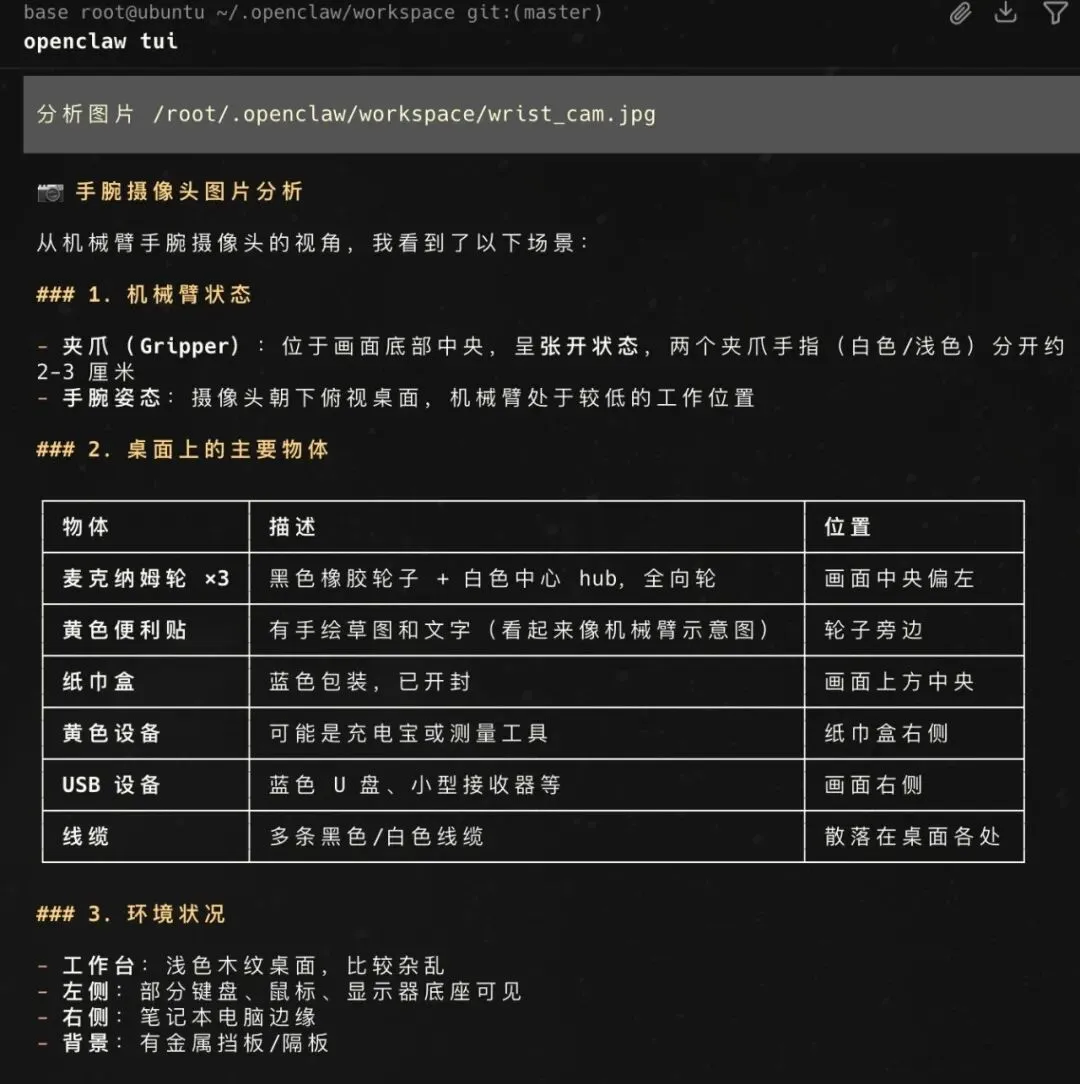
身份设定,设置为在 rdk x5 上通过esp32控制运行的机械臂,任务是实现机械臂运动,描述基础硬件配置信息。提供 github 上的工程链接,以及本地配置环境,尝试调用单个电机文件测试驱动,多电机联动测试。 Tool.md 扩充,摄像头安装,通过飞书实现图片调取。

上面这些步骤差不多完成后,我又给它配置一个24位的led灯环,想让舞蹈看起来更热闹些。不晓得什么问题板子凉了,再也没连接上。本来还想开个直播在线跳舞的……还可以多打印几个机械臂,在线点模特……可惜了……
跳了几个舞之后,它还给我分析了一下。
## 一些参考链接
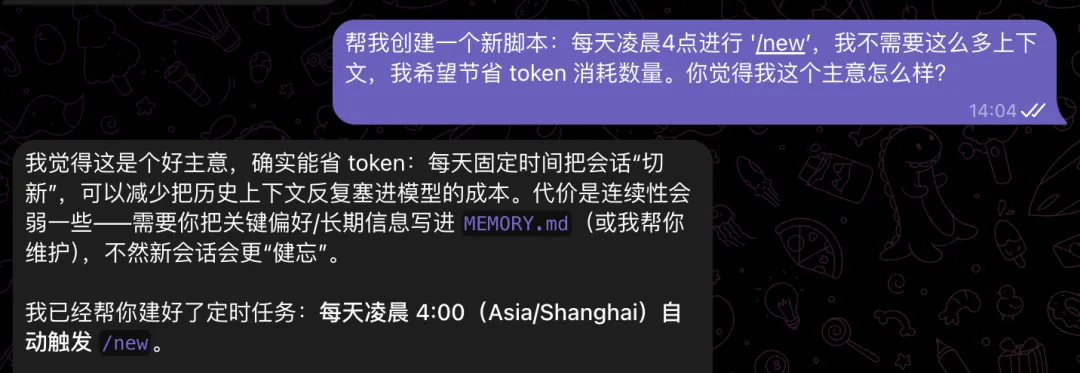
Token降本增效部分强烈建议阅读。
https://sspai.com/post/106232
